
阵列抗干扰高精度“北斗”接收机设计*
2022-12-07 03:53:16康荣雷班亚龙杨少帅
电讯技术 2022年11期
安 毅,康荣雷,班亚龙,杨少帅,吴 麒
(中国西南电子技术研究所,成都 610036)
0 引 言
随着“北斗”三号卫星导航系统全球组网的完成,面向全球用户提供的导航、定位、授时等服务为国防现代化建设和社会经济发展提供了重要基础保障条件。但由于导航信号到达地面极其微弱,如“北斗”信号到达接收机天线输出端的最小保证电平为-163 dBW[1],因此“北斗”信号极易受到主动和被动干扰,导致接收机跟踪环路失锁,严重影响“北斗”导航系统性能的发挥。
如果要完成阵列抗干扰高精度“北斗”接收机的工程设计,需要考虑实际天线阵元间互耦、天线阵元的幅相响应差异等的影响,因此需要采取相应的天线校准算法消除天线各阵元间幅相差异导致导向矢量不精确的问题。文献[2]尝试完成阵列天线的在线校准,补偿天线导向矢量的误差,但是缺点是无法同步实现在线校准和波束合成,且在干扰情况下无法完成在线校准。文献[3]提出了一种基于“北斗”信号重构的导向矢量实时校正算法,可以解决实际工程应用中“北斗”卫星导航抗干扰处理中阵列导向矢量存在的失配或偏差问题。另外,阵列抗干扰天线的射频接收通道间由于硬件通道差异、器件差异等因素必然导致射频信道延迟等引起的幅相差异,如果不进行射频通道的校准,可能导致导向矢量偏差,存在误差的导向矢量会导致波束合成的性能恶化甚至失效。
为解决在干扰环境下阵列天线自适应抗干扰处理导致“北斗”载波相位畸变的问题,以达到同时实现阵列天线抗干扰和高精度载波相位差分定位的目的,本文重点突破了稳相数字波束形成技术,在对与“北斗”卫星来波方向不同的干扰信号进行抑制的同时,保证不同“北斗”卫星之间的相对载波相位关系,确保了“北斗”卫星导航接收机获取的载波相位中心的稳定。另外,本文考虑了工程实现中必须解决的天线校准和射频多通道校准问题,通过对阵列天线和射频通道幅相差异的校正,保证了稳相数字波束形成技术中所需要的阵列天线导向矢量的准确性。最后设计了一款阵列抗干扰高精度“北斗”接收机并完成了实测验证。
1 稳相数字波束形成技术
1.1 信号模型
“北斗”阵列天线为N阵元组成的任意平面阵列,阵元间距为半波长,建立天线坐标系。以天线阵面中心为原点,X轴和Y轴在阵面上,Z轴垂直于阵面,且X轴、Y轴和Z轴构成右手系。
阵列天线接收的某入射方向的“北斗”信号单位方向矢量为

(1)
式中:(ψ,α)为天线坐标系下“北斗”信号入射的俯仰角和方位角。
在窄带信号的假设条件下,在t时刻阵列天线接收到的信号X(t)包含L颗可见“北斗”卫星信号、Q个干扰信号和噪声,其数学模型可表示为
(2)
式中:X(t)为N×1维列矢量,a(ψk,αk)为第k颗卫星的N×1维导向矢量,b(ψq,αq)为第q个干扰信号的N×1维导向矢量,sk(t)为参考阵元接收的第k颗卫星信号,jq(t)为参考阵元接收的第q个干扰信号,n(t)为N×1维阵列天线接收噪声矢量。
假设以第一阵元为参考阵元,则
(3)
(4)
式中:f为接收“北斗”信号的载波频率,fq为接收第q个干扰信号的频率,τnm为第m个信号到达第n个阵元时相对于参考阵元的时延,T为转置。
为了确定时延表达式τnm,由几何关系可推导得到
(5)
式中:c为光速,Pm为第m个“北斗”信号的单位方向列矢量,rn=(xn,yn,zn)为第n个阵元的三维坐标(1≤n≤N)。
综合上式,将X(t)写成矩阵形式为
X(t)=AS(t)+BJ(t)+n(t)。
(6)
式中:A为卫星信号的N×L维导向矢量矩阵,S(t)为L×1维的卫星信号列矢量,B为干扰信号的N×Q维导向矢量矩阵,J(t)为Q×1维的干扰信号列矢量,n(t)为N×1维阵列天线接收噪声矢量。
(7)
(8)
(9)
(10)
阵列天线抗干扰主要原理是通过对阵列天线接收的信号进行数字波束合成(Digital Beamforming,DBF)来实现对阵列天线方向图的控制。接收的数字信号X(t)进行DBF波束合成处理后得到的多波束信号Y(t)为
Y(t)=wHX(t),
(11)
(12)

1.2 稳相数字波束形成算法
按照线性约束最小方差(Linear Constrained Minimum Variance,LCMV)准则,优化目标是在某种线性约束条件下使天线阵输出功率最小,用数学表达式描述为
(13)
式中:Rx为输入信号的N×N维协方差矩阵;C为约束矩阵;f为约束的响应向量。
(14)
建立拉格朗日乘子的性能函数为
L=wHRxw+λ(1-wHa0)。
(15)

(16)
则
(17)
(18)

(19)
由于实际接收数据是有限长的,即协方差矩阵Rx可通过采集M个快拍数据近似估计为
(20)
数字稳相波束形成算法的主要运算量在于协方差矩阵Rx的运算和协方差矩阵的求逆运算。计算协方差矩阵所涉及的快拍数应满足M≥2N-3[4],N为抗干扰阵列的维数。为了平衡算法运算量和协方差矩阵的估计精度,本文取快拍数M=620。另外,协方差矩阵的求逆运算采用迭代运算,从而避免矩阵直接求逆导致的运算复杂度增加影响波束合成时权系数的更新率。
1.3 通道校准算法
阵列天线的射频通道的失配是“北斗”抗干扰天线工程实现中必须考虑的问题,射频通道失配主要是指通道间的幅频、相频特性不一致性,主要是由于射频通道低噪放、滤波器、混频器、模数转换器(Analog-to-Digital Converter,ADC)、电路板布线、器件温度特性等造成各通道幅相差异。需要指出的是,射频通道幅相特性与信号的入射方向无关。只有当射频通道间幅相特性一致时,才能保证基带信号的幅相关系与天线接收端的幅相关系相同。若通道间幅相差异未被修正,阵列天线的抗干扰性能将有明显下降[5]。
通道校准可采用对应“北斗”信号载波频率的校准信号进行校准,通过采集不同通道的AD数据,即可计算不同通道间的幅相差异。通道校准的处理原理是计算不同通道间的相关系数Ci,即

(21)
式中:t0为通道校准开始时刻;t1为通道校准结束时刻;si(t)为第i个通道接收的校准信号;sref(t)为选择的参考通道接收的校准信号;上标*表示复共轭。
将相关系数归一化后,得到
(22)
将所有通道之间的相关性写为一个矢量,可以得到射频通道一致性差异的通道校准复矢量,用于对输入信号相位补偿。通道校准矢量可写作
(23)
对于宽带干扰信号而言,还需要进行各通道的频率响应在整个信号带宽内的校准,此时需要采用宽带均衡的方法,将上述通道相关系数更换为自适应均衡滤波器,可以在整个信号带宽内调整通道间的幅相响应[6]。
1.4 阵列天线校准算法
在实际工程应用中,阵列天线的各阵元在设计中存在阵元方向图误差、阵元位置误差、阵元互耦等各种误差,天线实际的导向矢量与理论计算值存在较大差异,因此需对阵列天线的导向矢量进行校准。

(24)
式中:⊙表示Hadamard积。
另外,由于在线校正中校准信号的接收路径包括阵列天线和射频通道,因此得到校正后的导向矢量反映的是阵列天线阵元间和射频通道间的幅相差异。为了得到阵列天线的导向矢量,校正后的导向矢量还需扣除上一节通道校准得到的校准矢量C,得到反映阵列天线幅相特性的导向矢量a(ψk,αk),即
(25)
(26)
2 抗干扰高精度“北斗”接收机实现
2.1 总体方案设计
抗干扰高精度“北斗”接收机总体方案框图如图1所示,其具备“北斗”B1和B3频点抗干扰功能,每个频点可输出16路数字多波束信号。
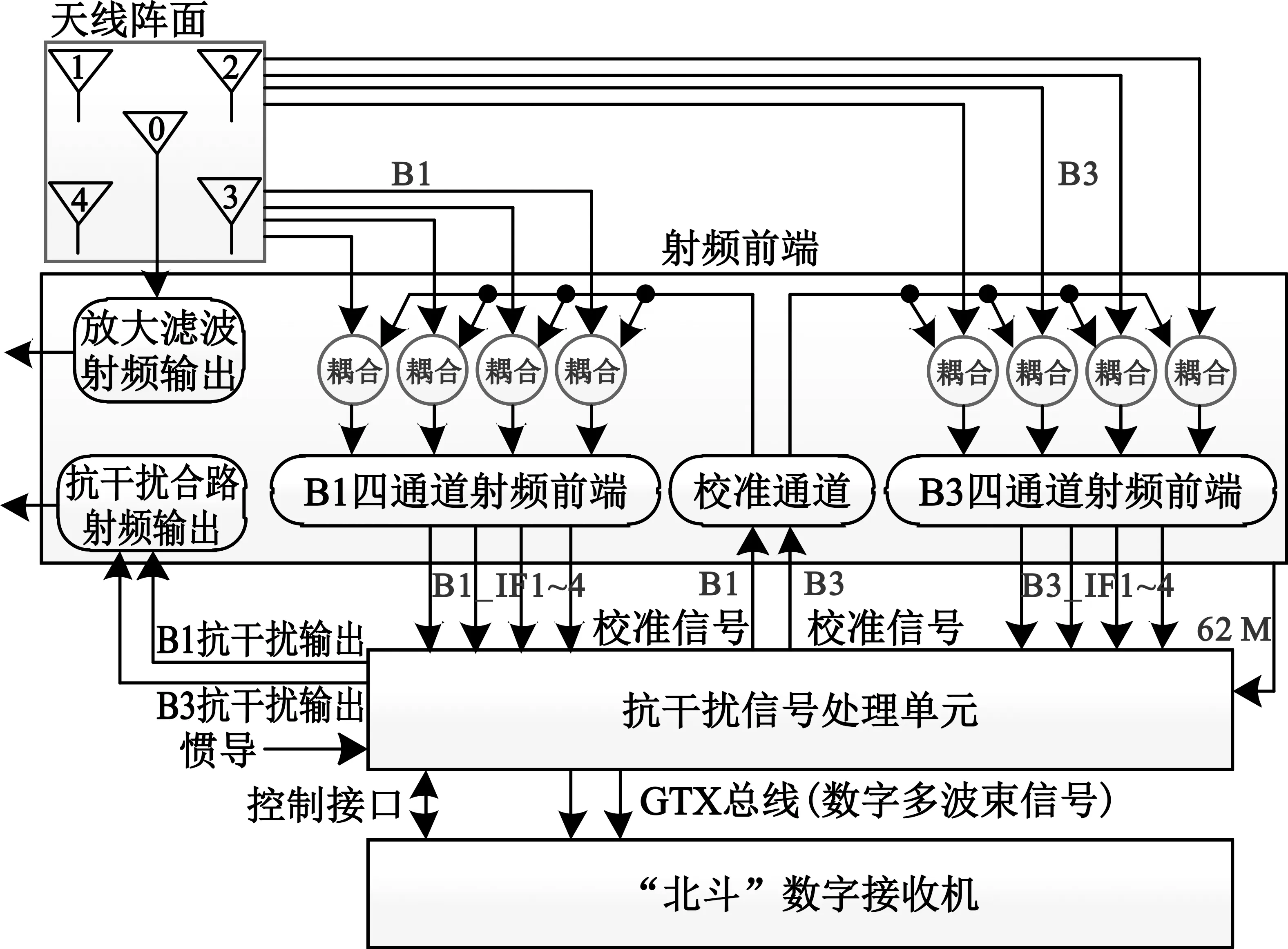
图1 总体方案框图
抗干扰高精度“北斗”接收机由天线阵面、射频前端、抗干扰信号处理单元和“北斗”数字接收机组成。天线阵面设计为4个抗干扰阵元和1个中心阵元,所有阵元都为双层叠层形式,4个抗干扰阵元上下两层分别覆盖“北斗”B1和B3频点,1个中心阵元上下两层分别覆盖“北斗”B1/GPS L1和“北斗”B3/GPS L2频点。射频前端完成“北斗”B1和B3频点信号的下变频和模拟中频输出、中心阵元信号放大滤波射频输出、“北斗”B1和B3抗干扰模拟中频信号上变频合路输出功率倒置(Power Inversion,PI)抗干扰算法处理后的信号、62 MHz采样时钟输出等,在设计时需考虑射频通道的线性度、带外抑制、通道匹配性和通道间隔离度等[7]。抗干扰单元通过ADC采样完成模拟中频信号的数字化采样,ADC量化位数的讨论见文献[8],在数字域通过设计的抗干扰算法完成对接收信号的抗干扰处理,通过GTX总线输出数字多波束信号。另外,抗干扰单元通过产生B1和B3频点的校准模拟中频信号,与射频前端一起共同完成射频通道校准。“北斗”数字接收机接收数字多波束中频信号,对抗干扰处理后的“北斗”信号进行捕获、跟踪,完成定位解算并输出伪距、载波相位等原始观测量,同时将解调出的星历数据和接收机位置发送给抗干扰信号处理单元。
2.2 通道校准和天线校准流程
抗干扰高精度“北斗”接收机的中实现稳相抗干扰的关键技术是稳相数字波束形成技术,但是在实际工程实现中,为了保证抗干扰处理后完成对载波相位的准确补偿,需要精确测量阵列天线导向矢量。导向矢量的获取,需要完成天线校准和通道校准,将天线校准结果和通道校准结果全部考虑在内,才能得到与实际相符合的阵列天线导向矢量。
通道校准流程如图2所示。首先抗干扰单元产生B1和B3频点的校准模拟中频信号,然后通过射频前端的上变频得到B1和B3频点校准信号,校准信号分别通过耦合器接入到B1四通道射频前端和B3四通道射频前端;校准信号完成下变频处理后,抗干扰信号处理单元采集数字信号,按照通道校准算法计算过程完成射频通道的通道校准。
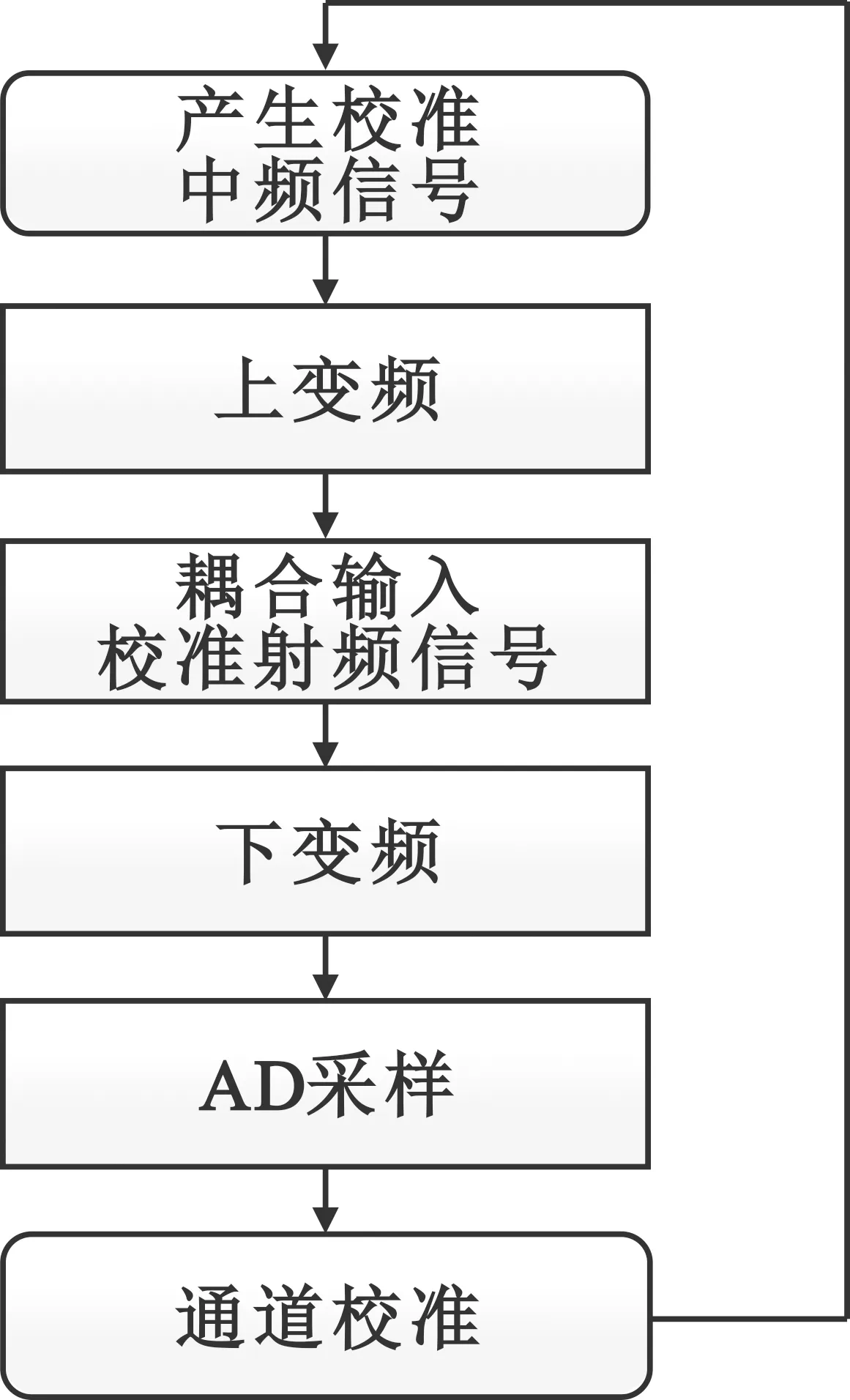
图2 通道校准流程图
天线离线校准流程如图3所示。首先将天线阵面放入微波暗室进行全空域方向的幅相响应测量,俯仰角和方位角的测量格点间隔为5°;测量完成后经过归一化处理后得到天线阵面的导向矢量;采用拟合插值的方法得到测量格点间隔为1°的导向矢量;按规定格式保存导向矢量。若需对暗室测量得到的导向矢量进行误差校正,可对导向矢量进行在线校准。
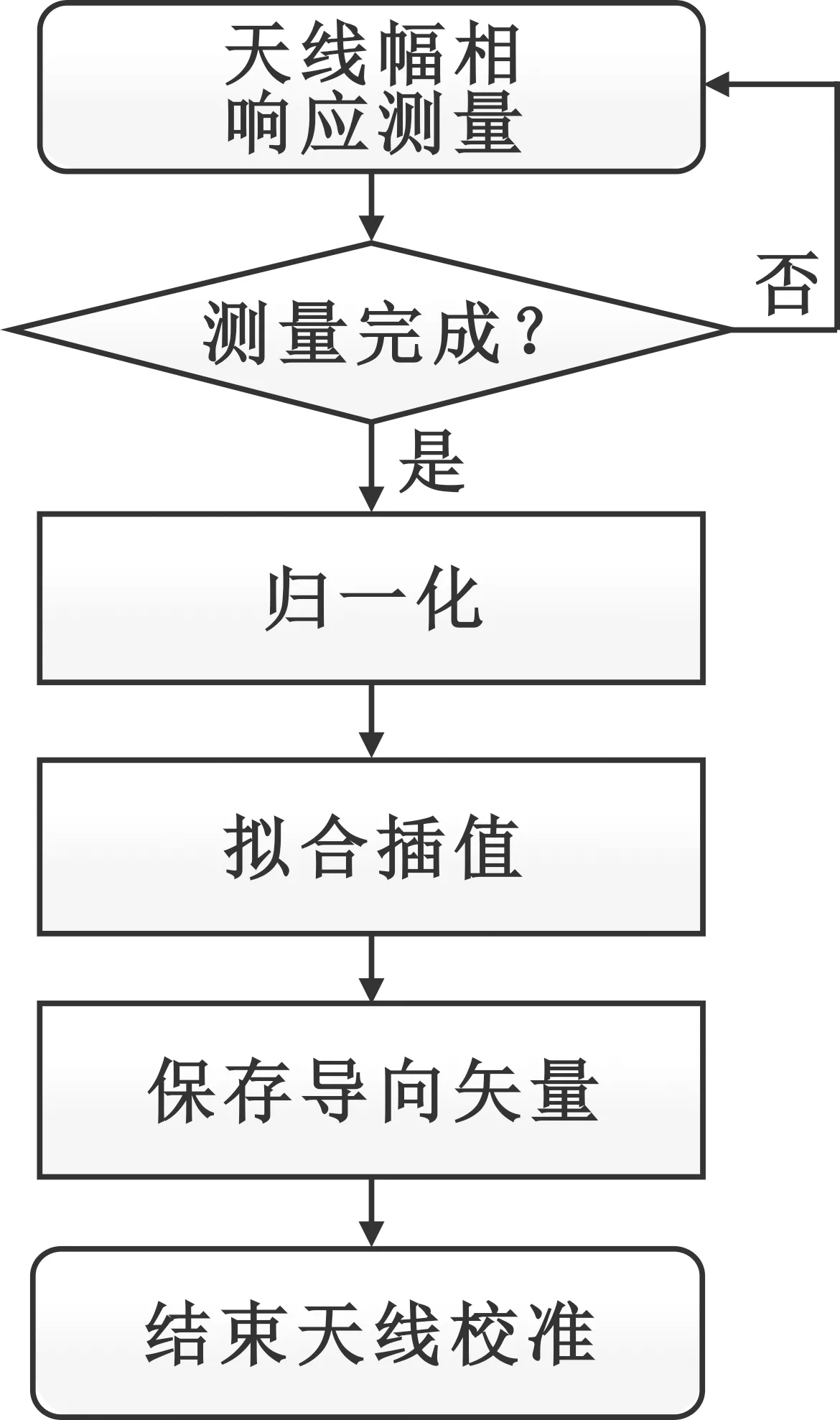
图3 天线离线校准流程图
2.3 软件执行逻辑
抗干扰信号处理单元的处理器选用Xilinx公司的XC7Z045芯片,主控程序运行在基于CortexTM-A9的ARM核内,逻辑程序运行在可编程逻辑单元(Programmable Logic,PL)内,PL内主要运行信号采集、矩阵运算、权系数计算、波束合成等涉及信号处理的逻辑并行运算。
抗干扰信号处理单元主控程序流程图如图4所示。上电完成初始化后,程序首先加载天线离线校准保存的导向矢量;加载完成后执行射频前端通道校准;然后主控程序控制PL端为PI抗干扰模式;将PI抗干扰处理后的信号发送给“北斗”数字接收机,使得接收机在干扰条件下能跟踪到“北斗”卫星信号,将跟踪到的卫星解调出的星历、接收机位置发送给抗干扰信号处理单元;抗干扰信号处理单元结合接收到的惯导测量的天线姿态数据、星历和接收机位置数据,进行“北斗”卫星信号的入射角计算;当计算出的卫星入射角个数大于6颗时,主控程序控制PL端为MVDR抗干扰模式;之后随着卫星星历的增多以及随着卫星入射角的变化,实时更新卫星入射角信息;根据卫星入射角信息,查找对应方位的导向矢量,并进行导向矢量设置;在执行MVDR抗干扰算法的同时,抗干扰信号处理单元和“北斗”数字接收机的在线校准通道可完成在线校准工作,校准结果可对离线测量的导向矢量进行校准;最后将软件运行状态上报。
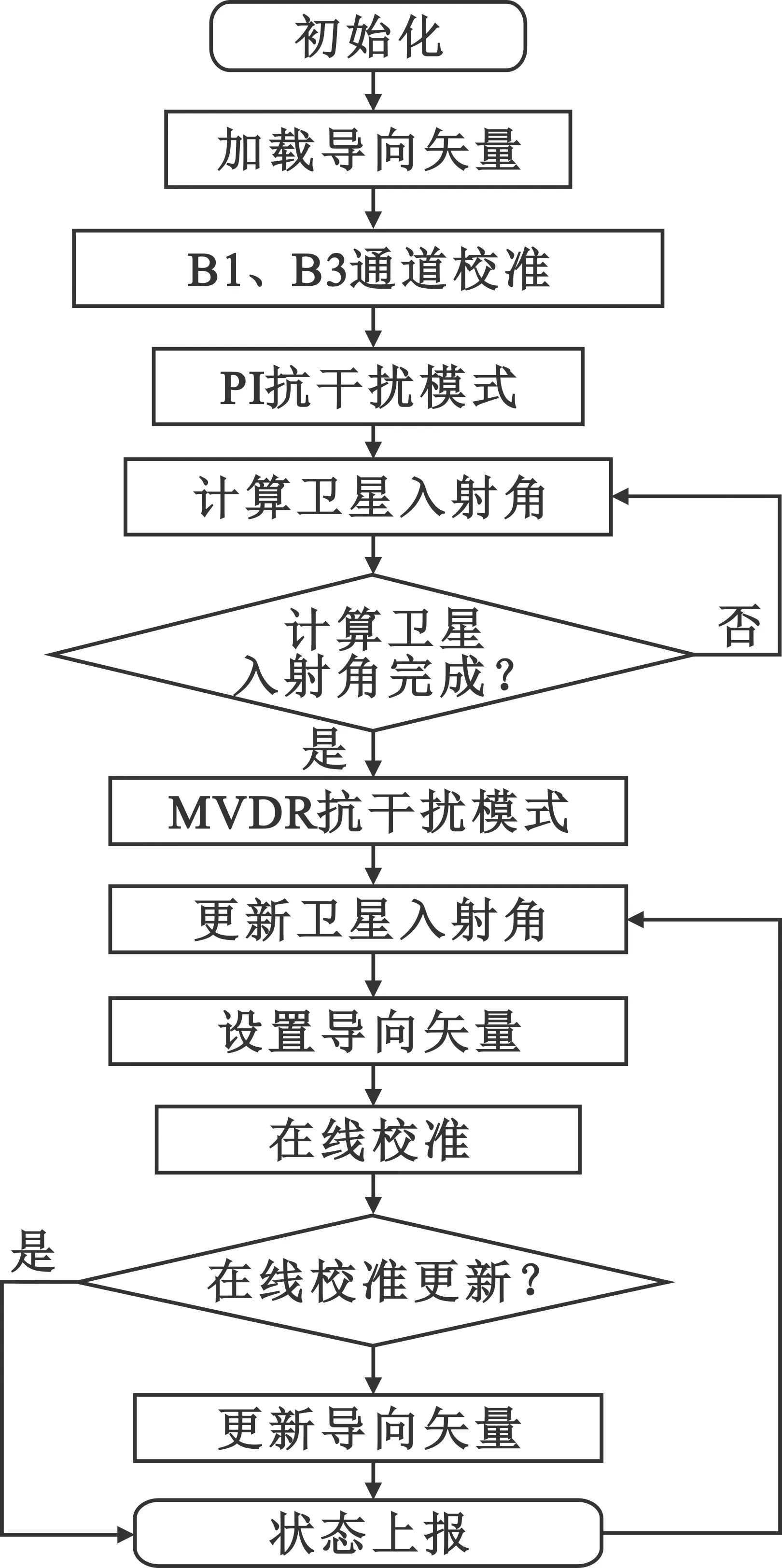
图4 主控程序流程图
“北斗”数字接收机的软件执行逻辑与普通“北斗”接收机相似,主要完成“北斗”信号的捕获、跟踪、定位解算和原始观测量的输出,主要区别是输入的中频信号是数字多波束中频信号,每个跟踪通道跟踪的卫星受控于抗干扰信号处理单元。
3 实测验证
3.1 测试条件
“北斗”高精度抗干扰天线实物图如图5所示。

图5 天线实物图
搭建如图6所示的外场试验环境,整个试验环境包括三部分,即基准站、移动站和干扰源。
基准站主要包括GNSS天线、GNSS接收机、数传电台、数传天线、电源。基准站架设在远离干扰源的位置,以免受干扰影响。基准站通过数传电台将基准站GNSS接收机接收到的“北斗”卫星原始观测量(星历、伪距、载波相位)发送到移动站,用于完成高精度载波相位差分计算。
移动站主要包括“北斗”高精度抗干扰天线、惯导、GNSS接收机、计算机、数传电台、数传天线、电源等。将抗干扰天线安装在试验平台上,天线姿态由外部惯导提供;将抗干扰天线内部的“北斗”数字接收机输出串口与计算机连接;为了进行MVDR算法、PI算法和天线阵面中心阵元输出信号(直通信号)三种条件下的抗干扰高精度对比试验,需同时将抗干扰天线经过PI抗干扰算法输出的射频信号接入一个普通GNSS接收机,另外将天线阵面中心阵元未经抗干扰处理的信号接入另外一个普通GNSS接收机,经过MVDR算法处理后生成的数字多波束信号则直接通过“北斗”数字接收机处理;数传电台与计算机连接,用于接收基准站发送的基准站“北斗”卫星原始观测量。
干扰源主要包括干扰信号发生器、发射天线。在测试地点周围架设2个固定干扰源,一个干扰源发射B1频点(1 561.098 MHz)的宽带干扰信号,干扰带宽为4 MHz;另一个干扰源发射B3频点(1 268.52 MHz)的宽带干扰信号,干扰带宽为20 MHz。宽带干扰通过对伪随机码序列进行正交相移键控(Quadrature Phase Shift Keying,QPSK)调制产生,干扰信号发射功率为-10 dBm。试验过程中干扰信号到达抗干扰天线阵面的实际功率通过“北斗”高精度抗干扰天线内部的信号功率计算单元实时计算并输出。
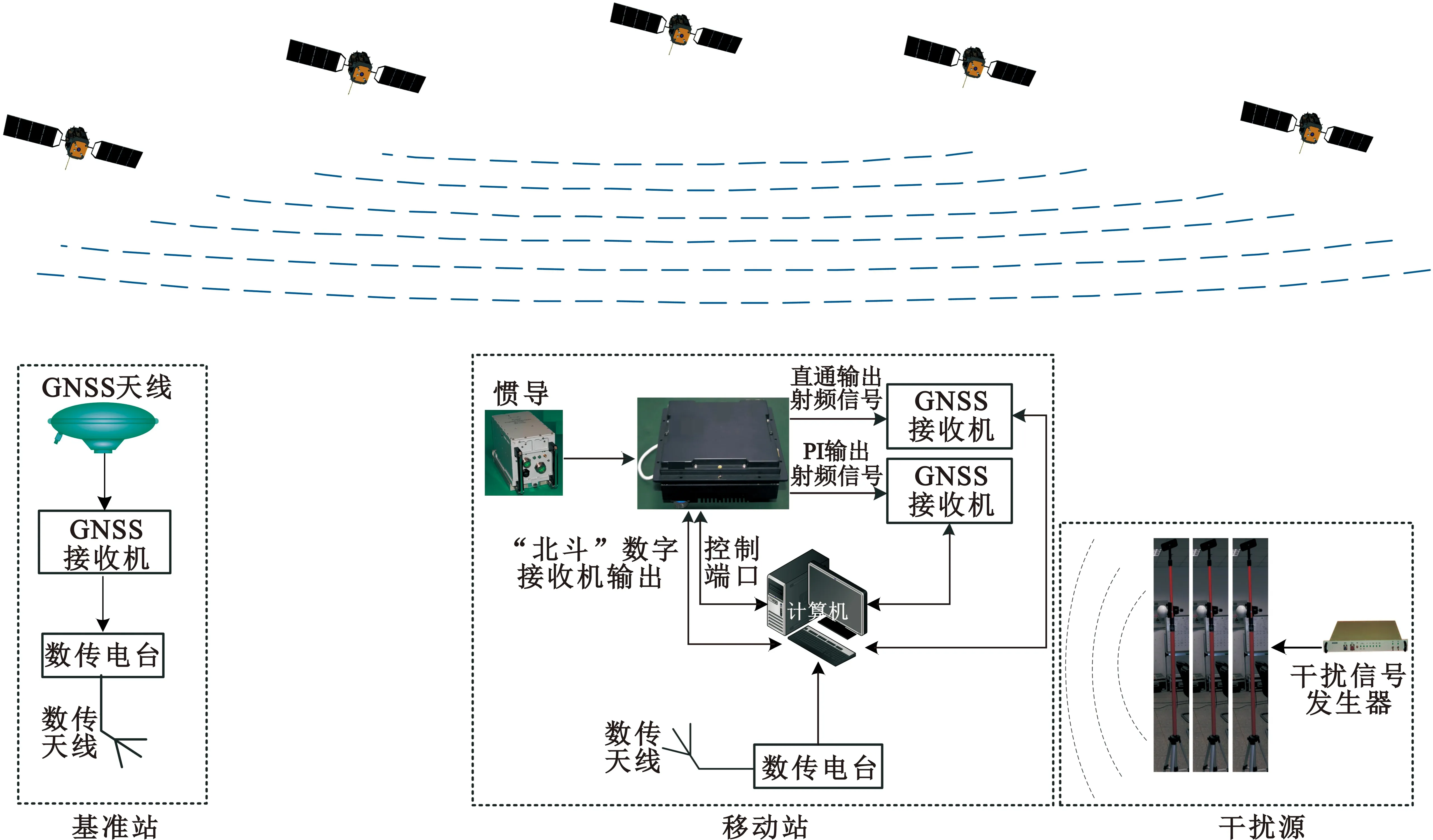
图6 外场试验环境
3.2 抗干扰高精度测试
在抗干扰高精度试验中,按照测试条件进行设备安装和试验参数设置,主要对比MVDR算法、PI算法和直通三种模式下卫星信号的连续锁定时间和RTK定位结果。另外在无干扰条件下,针对MVDR算法得到的“北斗”卫星载波相位测量值进行了观测值精度统计。
图7和图8为“北斗”PRN8号卫星在B1和B3频点宽带干扰条件下,MVDR算法和PI算法的连续锁定时间对比图,由于干扰条件下直通模式接收机已经完全失锁,因此未在图中画出直通模式下PRN8号卫星的连续锁定时间。
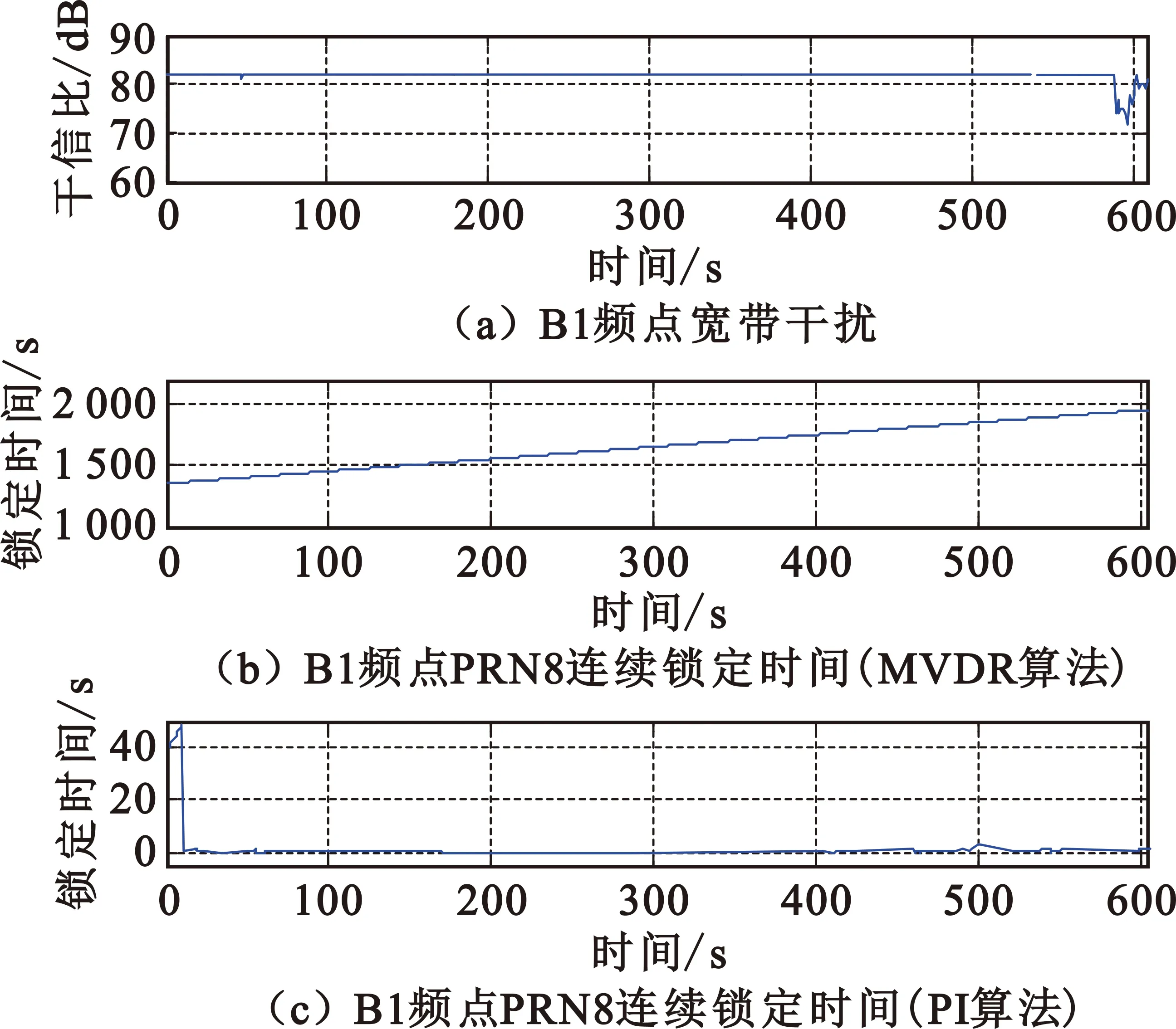
图7 B1频点PRN8号星连续锁定时间对比
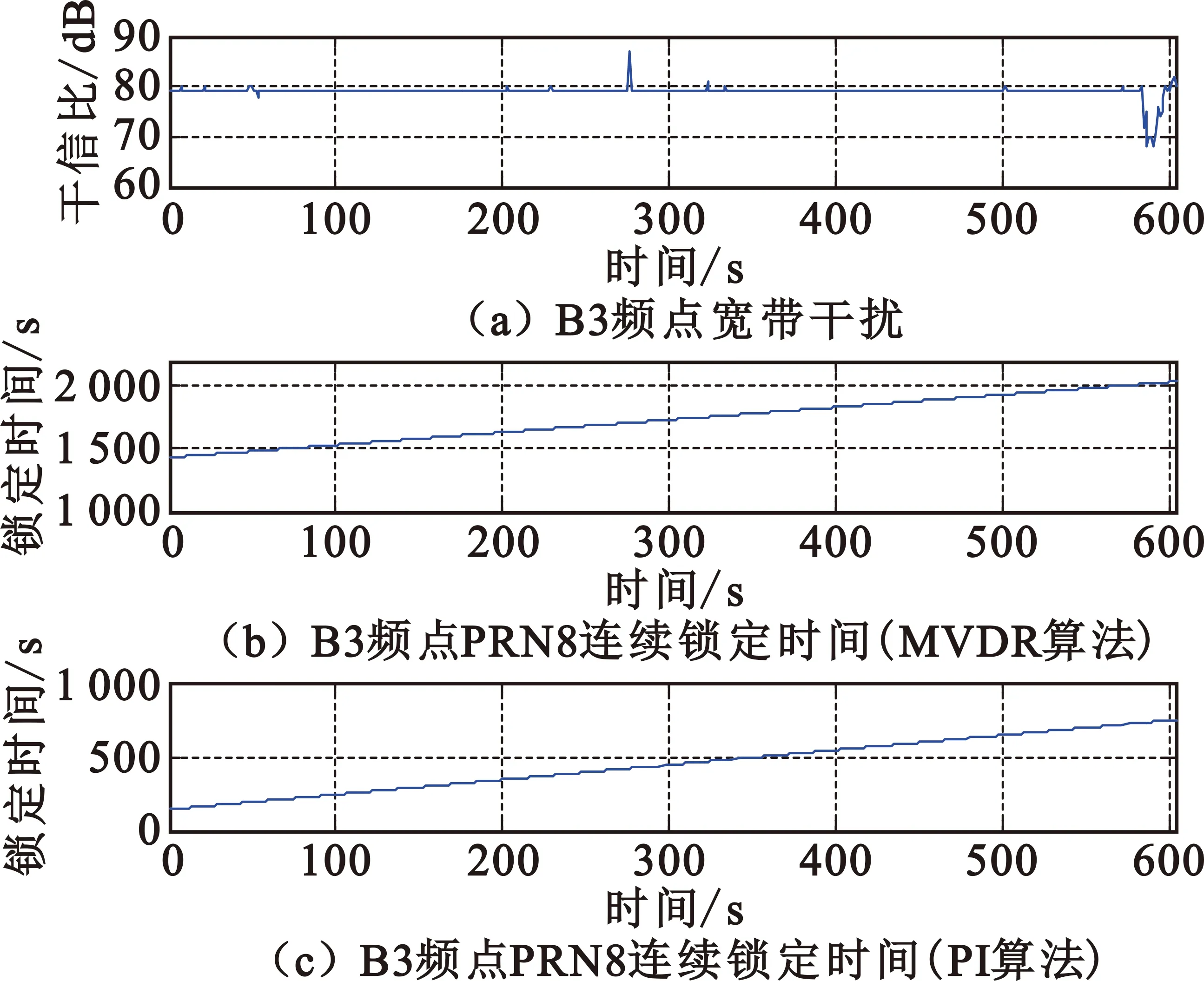
图8 B3频点PRN8号星连续锁定时间对比
从图7可以看出,在B1频点施加宽带干扰后,MVDR算法抑制了干扰信号且能够获得卫星指向增益,PRN8号卫星未出现失锁情况,连续锁定时间连续累加;而PI算法未能完全抑制干扰,且未获得指向增益,因此出现了频繁失锁的情况。
从图8可以看出,在B3频点施加宽带干扰后,MVDR算法也能抑制干扰信号且能获得卫星指向增益,PRN8号卫星未出现失锁且连续锁定时间连续增加;但是由于施加在B3频点的干扰低于施加在B1频点的干扰,PI算法抑制了B3频点的干扰,PRN8号卫星未失锁,保证了连续锁定时间连续增加。
图9给出了在宽带干扰条件下MVDR算法和PI算法差分定位结果的基线对比,可以看出MVDR算法在整个试验过程中保持RTK整型解状态,即完成了整周模糊度固定,实现了高精度的RTK定位解算;而PI算法对载波相位进行了调整,导致载波相位观测值的连续性受到破坏,因此在整个试验过程中无法保持整周模糊度固定,即不能进行高精度RTK定位解算,定位误差也较大。
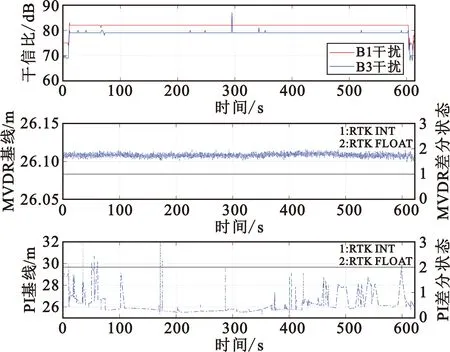
图9 差分基线和差分状态对比
图10和图11对比了在宽带干扰条件下,MVDR算法和PI算法差分定位结果在东北天三个方向上的误差分布情况。可以得出,MVDR算法完成的高精度RTK定位解算,水平定位误差统计结果为0.008 m,垂直定位误差统计结果为0.014 m;而PI算法无法完成高精度RTK定位解算,水平定位误差统计结果为1.363 m,垂直定位误差统计结果为4.079 m。
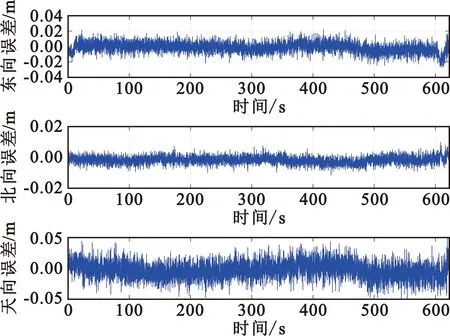
图10 MVDR算法差分基线东北天分量误差
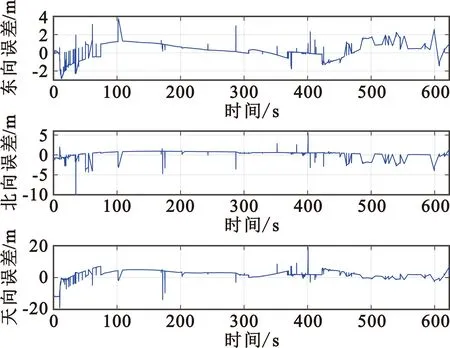
图11 PI算法差分基线东北天分量误差
表1为MVDR算法下,“北斗”数字接收机各跟踪通道获取的载波相位观测值精度统计结果。数据采集过程使用实际“北斗”信号测试,连接设备进行静态数据采集,采集过程中不施加干扰,将MVDR算法获取的信号分量通过“北斗”数字接收机跟踪通道并保存上报的载波相位值,同时将参考阵元1获取的信号分量经过合路射频输出给参考接收机跟踪通道并保存上报的载波相位值,之后将这两组载波测量值进行三差处理,按照式(27)统计出不同卫星的载波相位测量精度[9]。
(27)
式中:σ(k)为第k个信号分量的载波相位测量精度;k为信号分量编号;i为卫星观测数据历元序号;Δ▽Δφij(k)为第i+1个历元的第j颗卫星相对任意基准星的载波观测值双差与第i个历元的第j颗卫星相对任意基准星的载波观测值双差之差,j为可见卫星号;n为三差观测值总数。
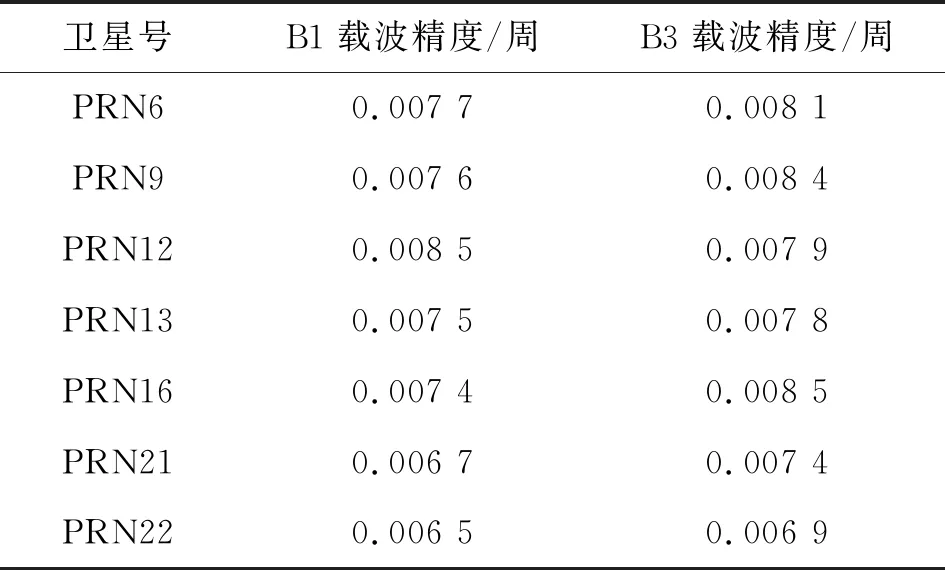
表1 载波相位观测值精度统计
4 结束语
针对阵列抗干扰高精度“北斗”接收机工程实现问题,本文重点突破在设计过程中所需攻克的稳相数字波束形成技术、阵列天线校准技术、射频前端通道校准技术,设计了一款阵列抗干扰高精度“北斗”接收机。
通过外场试验验证,所研制的阵列抗干扰高精度“北斗”接收机可在干信比80 dB的条件下,采用MVDR抗干扰处理算法完成高精度载波相位差分相对定位,定位精度优于2 cm,克服了功率倒置抗干扰处理算法引入载波相位畸变而无法完成高精度定位的问题。通过原理样机的研制以及外场试验测试,证明基于阵列天线的稳相数字波束形成技术具备在干扰条件下完成高精度载波相位差分定位的能力,该设计具有较强的先进性,可为干扰条件下实现“北斗”载波相位差分定位打开新的设计思路。另外,考虑在实际干扰环境中除存在压制干扰外,还存在欺骗干扰,本文所述算法对抗欺骗干扰效果不理想,下一步可深入研究基于阵列天线的欺骗干扰检测和抑制技术。
猜你喜欢
测控技术(2018年6期)2018-11-25 09:50:18
电子制作(2018年19期)2018-11-14 02:36:40
北京航空航天大学学报(2017年9期)2017-12-18 07:12:33
光学精密工程(2016年3期)2016-11-07 09:03:34
电子制作(2016年1期)2016-11-07 08:42:41
系统工程与电子技术(2016年4期)2016-08-24 07:46:04
测绘科学与工程(2016年6期)2016-04-17 06:51:25
西部广播电视(2015年10期)2016-01-18 04:01:45
山东冶金(2015年5期)2015-12-10 03:27:41
电测与仪表(2014年15期)2014-04-04 12:05:32
