激光关联成像雷达研究进展与展望
2022-12-06 10:32龚文林陈明亮韩申生
量子电子学报 2022年6期
龚文林,陈明亮,韩申生∗
(1苏州大学光电科学与工程学院,江苏 苏州 215006;2中国科学院上海光学精密机械研究所量子光学重点实验室,上海 201800)
0 引言
激光成像雷达是一种将调控的激光场辐照于待测目标,通过对目标回波信号进行探测和数据处理而获取目标图像信息的主动成像技术[1]。由于该技术具备成像分辨率高、测距测速精度高、抗干扰能力强、全天时工作等优势,已在测绘、气象监测、考古、机器人自动导航、目标识别等领域得到了广泛应用[2]。然而,现有的激光成像雷达技术均建立在麦克斯韦经典电磁场理论和香农经典信息论基础上,通过直接测量目标反射信号的强度而获取目标信息,在图像信息获取方面受成像机理、单元器件以及环境适应性等诸多限制,导致探测距离、空间分辨率、实时性和测距精度相互制约,在远距离、高速、高分辨激光三维成像应用方面仍然存在诸多问题。比如:在远距离探测与识别方面,隐身目标和超高速飞行目标的探测与识别、水下目标成像一直是个难题;对于星载对地高分辨三维成像而言,受激光器功耗和体积限制,目前仅能实现低帧频单点测高,点云密度较低、激光足印较大,导致卫星工作效率和空间分辨率均极低,难以满足遥感应用需求;对于空间碎片测量而言,只能在电视跟踪的辅助手段下实现较大碎片的测距,无法做到激光主动三维成像。因此,迫切需要探索并发展建立在现代物理学和信息论基础之上的新型激光成像雷达体制。
与传统激光成像雷达技术不同,激光关联成像雷达属于一种全新的凝视成像体制,它是建立在辐射场的高阶相干性理论基础之上,通过调控光场涨落、单像素探测器接收目标回波信号并结合计算重构方法获取目标的图像信息[3−6]。该技术的物理原理源自于1995年的纠缠光源关联成像[7]。后来,人们发现利用经典热光场也能实现关联成像[8,9],为关联成像往工程应用转化提供了一种有效的途径,已经实现了从X光到微波波段、空域到时域的关联成像原理验证[10−19]。尤其在激光关联成像雷达方面,开展了较为深入的理论分析、技术攻关和演示实验,验证了该技术具备高的图像获取效率、超分辨成像和较强的抗烟雾干扰能力[20−26],在远距离、高分辨、高速运动目标探测与识别等领域有着重要的应用前景。
借鉴传统激光雷达技术,激光关联成像雷达主要分为两种工作方式:(1)窄脉冲激光照明、直接测量目标回波强度信息[10−12];(2)基于时间调制的长脉冲激光照明、外差探测方式测量目标回波信息[27,28]。目前大多数研究集中在第一种工作方式,已经建立了较为完善的理论体系,完成了公里级车载/机载激光三维关联成像、公里级多个动目标关联成像和百公里级单光子探测灵敏度的激光三维关联成像演示实验[29−31]。而长脉冲外差探测体制激光关联成像雷达研究目前处于初步阶段,其优势主要在于隐秘性好、抗背景光干扰能力强以及可获取的目标信息维度更高,已经有一些相关的理论分析、数值模拟和实验验证工作[27,28,32−35]。
本文介绍了窄脉冲直接探测体制激光关联成像雷达和长脉冲外差探测体制激光关联成像雷达的原理方案、技术特点和近期主要研究进展。进而围绕远距离、高分辨、高速运动目标探测与识别应用,对激光关联成像雷达亟需解决的科学与技术问题、发展趋势进行了探讨和展望。
1 窄脉冲直接探测体制激光关联成像雷达
1.1原理方案
窄脉冲直接探测体制激光关联成像雷达原理方案结构如图1所示[10,11]。整个光学系统分为发射系统和接收系统两大部分,发射系统在赝热光源面处产生一个脉冲式的随机散斑场,经分光片(BS)后分成两束,其中反射光束通过参考镜将赝热光源面处的散斑场成像于面阵探测器(CCD)上,由该CCD记录散斑场的空间强度分布;透射光束通过发射镜将赝热光源面处的散斑场成像于待测目标上。接收系统中的接收镜将目标反射的光信号汇聚于单像元的光电倍增管(PMT)上,通过高速采集卡采集PMT探测到的一序列电压信号。结合高速采集卡记录的电压信号与CCD所记录的空间强度分布进行关联图像重建,在凝视探测的条件下便可以获取待测目标的表面三维强度分布图像。
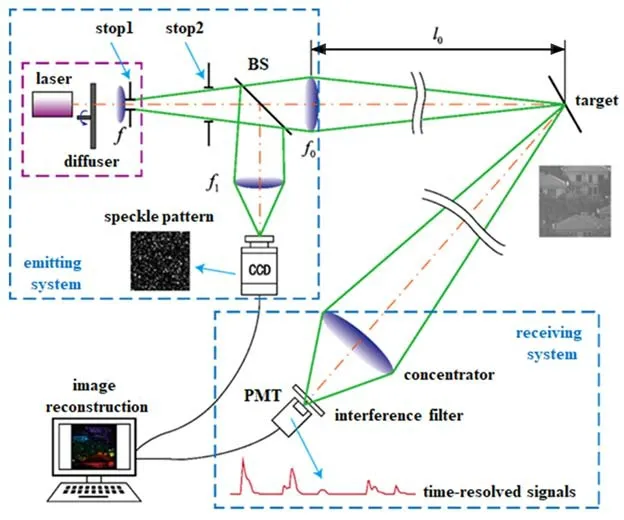
图1 窄脉冲直接探测体制激光关联成像雷达原理方案结构图[11]Fig.1 Principle schematic diagram of narrow pulsed ghost imaging lidar via direct detection[11]
1.2近期主要研究进展
1.2.1 静止目标激光关联成像雷达研究进展
激光关联成像雷达的原理方案起源于中国科学院上海光学精密机械研究所2009年提出的无透镜远场关联成像[36]。2012年,该单位研制出一套窄脉冲直接探测体制激光关联成像雷达原理样机,初步验证了激光关联成像具备超分辨成像能力并在一定程度上改善了大气湍流对成像质量的影响[10],如图2所示。图2(d)为激光关联成像雷达发射系统有效通光口径为18 mm、接收系统有效通光口径为420 mm时的成像结果,而图2(e)为激光主动照明、接收系统有效通光口径为420 mm时的成像结果,可以看出激光关联成像可在一定程度上改善大气湍流引起的像质退化问题。图2(g)和图2(h)为探测距离900 m、发射系统有效通光口径为18 mm时,对图2(f)所示的分辨率板目标进行激光关联成像的结果,实现了超光学系统衍射极限1.6倍左右的超分辨成像。为了进一步验证大气散射对激光关联成像质量的影响,2013年中国科学院上海光学精密机械研究所率先公开报道了探测距离为2 km、不同气象条件下传统成像与激光关联成像的对比实验结果,演示了激光关联成像雷达具备全天时、一定程度上穿透雨雾的成像能力[25],如图3所示;而美国陆军实验室于2014年也报道了类似的结果[37]。2015年,中国科学院上海光学精密机械研究所又开展了探测距离21.7 km、中雾条件下的跨海激光关联成像实验,获得了空间分辨率优于0.5 m的成像结果。
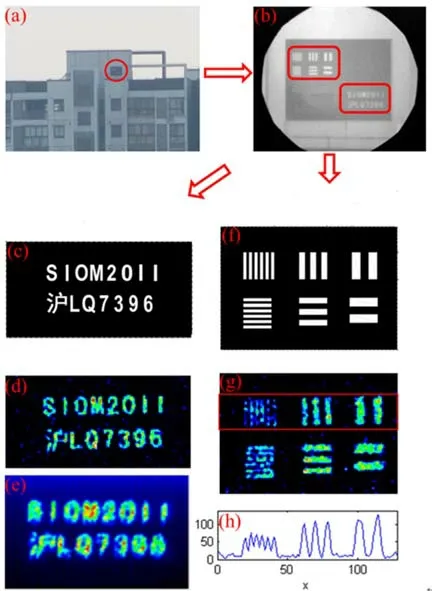
图2 探测距离900 m下的激光关联成像雷达超分辨成像和改善大气湍流对成像质量影响的室外实验验证[10]Fig.2 Outdoor experimental demonstration of super-resolution imaging and improvement of imaging quality in atmospheric turbulence for ghost imaging lidar at 900 m range[10]
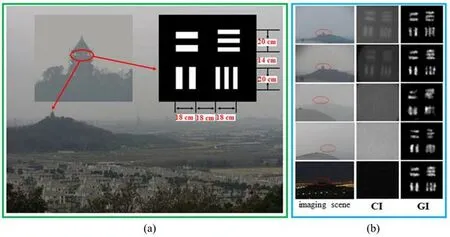
图3 探测距离2 km、不同气象条件下的激光关联成像实验结果。(a)成像目标参数;(b)第一行至第五行依次为晴朗、多云、小雨、中雾和夜晚条件下的传统成像(CI)和关联成像(GI)结果[25]Fig.3 Experimental results of ghost imaging lidar in different weather conditions at 2 km range.(a)Parameters of imaging target;(b)Results of conventional imaging(CI)and ghost imaging(GI)in the weather condition of clear,cloudy,light rain,moderately foggy and night[25]
同时,为了探索激光关联成像雷达技术在高分辨对地三维观测上的应用,在国家863计划地球观测与导航领域主题项目“强度关联遥感成像技术研究(一期)”的支持下,2013年中国科学院上海光学精密机械研究所研制出国际首台可见光波段激光三维关联成像原理样机,演示了探测波长为532 nm、探测距离为2 km、空间分辨率为0.1 m、测距分辨率为0.25 m的三维成像[11,38],如图4所示。图4(a)为激光三维关联成像原理样机实物图,图4(b)为对嘉定电力局屋顶进行三维成像的结果。2015年,该单位又研制出远距离近红外激光三维关联成像工程样机,实现了探测距离为95.5 km的强散射点目标激光三维关联成像,并与激光主动照明焦平面成像雷达进行了对比实验,进一步验证了激光关联成像所具备的高探测灵敏度和改善大气环境对成像质量影响的能力。
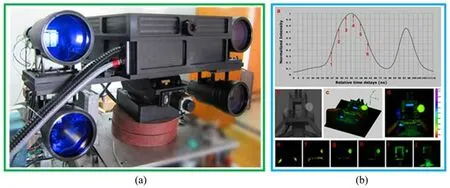
图4 激光三维关联成像实验验证。(a)532 nm激光三维关联成像原理样机实物图;(b)对嘉定电力局屋顶进行三维成像的结果[11]Fig.4 Experimental demonstration of three-dimensional ghost imaging.(a)Picture of 532 nm three-dimensional ghost imaging system;(b)Three-dimensional imaging result of the roof of Jiading Electricity Bureau[11]
为了研究单光子灵敏度下的激光关联成像雷达性能,上海交通大学和中国科学院上海光学精密机械研究所开展了基于光子计数和首达光子的激光关联成像理论和实验研究[31,39−41]。2015年,上海交通大学开展了基于时间关联光子计数的激光关联成像室内原理验证,在回波光子数概率约为2.0%时仍可以获得较好的成像结果[39]。2016年,中国科学院上海光学精密机械研究所提出了基于多路并行探测和基于时分复用的光子计数方案,通过对已有的532 nm激光关联成像雷达系统进行改造,实验验证了探测距离为2.0 km、空间分辨率优于10 cm的光子计数关联成像[40]。2018年,上海交通大学和国防科技大学将首达光子成像方法引入激光关联成像,开展了相关的理论分析和实验验证,演示了0.1光子/像素的首达光子激光关联成像[41];在此基础上,2020年研制出基于首达光子的远距离单像素激光成像雷达系统,并在青海湖开展了外场实验,实现了探测距离为100 km、0.01光子/像素的首达光子三维成像[31],如图5所示。
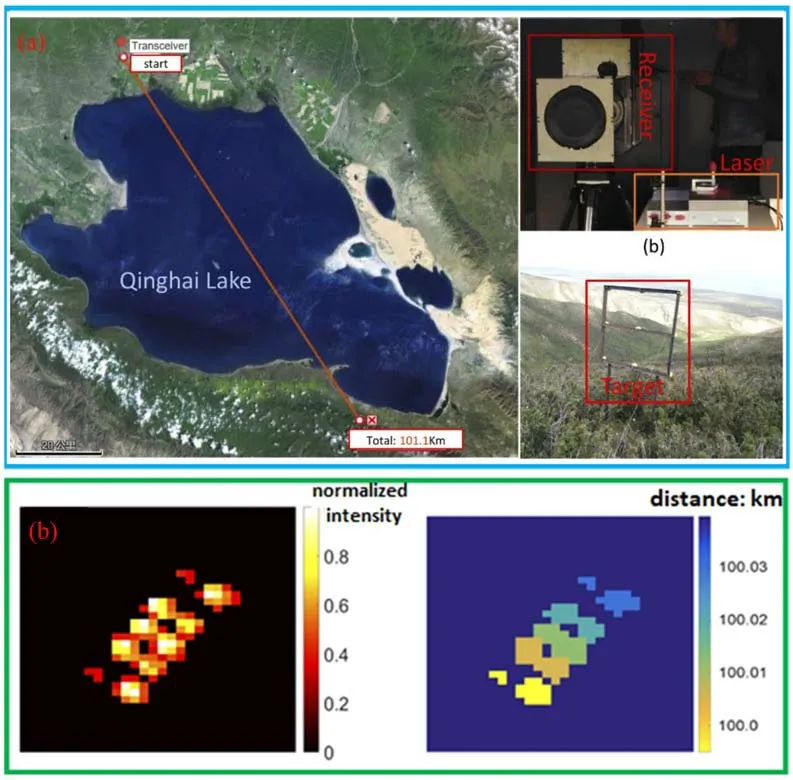
图5 探测距离为100 km首达光子单像素激光成像雷达实验验证。(a)实验场景图;(b)成像结果[31]Fig.5 Experimental demonstration of first-photon single-pixel imaging lidar at 100 km range.(a)Picture of experimental scene;(b)Imaging result[31]
1.2.2 相对运动目标激光关联成像雷达研究进展
2011年,上海交通大学开展了运动目标激光关联成像研究,分析了目标横向运动对关联成像质量的影响[42]。2012年,中国科学院上海光学精密机械研究所提出了基于参考臂探测器记录的散斑场强度分布平移补偿进而消除横向运动模糊的动目标成像方案[43]。基于上述思想,中国科学院上海光学精密机械研究所、国防科技大学和深圳大学等单位开展了轴向运动模糊消除、运动轨迹反演、运动估计和基于追迹的渐进关联成像等理论和实验研究[44−47],为高速运动目标激光关联成像雷达系统的设计和研制提供了技术指导。
在国家863计划地球观测与导航领域主题项目“强度关联遥感成像技术研究(二期)”支持下,2016年中国科学院上海光学精密机械研究所研制出一套机载近红外激光三维关联成像雷达试验样机,该样机具备一定角度范围内的目标搜索、高精度跟踪和高分辨成像能力[29],如图6所示。在完成了车载演示实验的基础上[30],2016年12月在西安阎良机场开展了基于运-12平台的机载对地激光三维关联成像演示实验,实现了探测距离1.04 km条件下横向分辨率优于0.48 m、高程分辨率优于0.5 m的成像验证[29],其结果如图7所示。图7(a)为测试靶标,三线靶标条纹间的中心距离为0.48 m、两组靶标的高程差为0.5 m;由于采样过程中雷达系统与测试靶标之间的距离一直在变化,若不对目标回波信号进行校正,则会导致关联成像重构结果失效[图7(b)],而对目标回波信号校正后的关联成像重建结果如图7(c)。2018年,通过对机载激光三维关联成像雷达试验样机进行改造,该单位和国防科技大学一起又演示了对三架大疆无人机进行的测距、测轨和三维关联成像实验(如图8所示),初步验证了激光关联成像雷达在低小慢目标探测领域的重要应用。

图6 机载近红外激光三维关联成像雷达试验样机[29]Fig.6 The experimental prototype of airborne near infrared three-dimensional ghost imaging lidar[29]
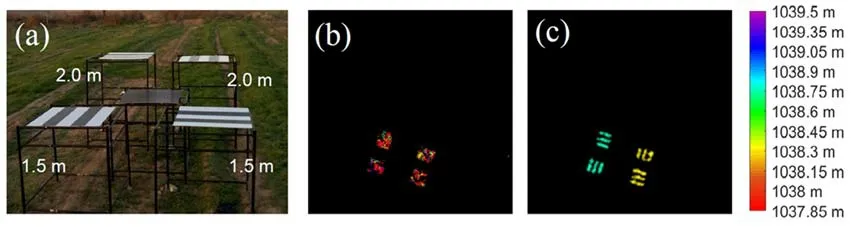
图7 探测距离1.04 km机载对地激光三维关联成像实验验证结果。(a)测试靶标;(b)回波信号未校正时的重建结果;(c)回波信号校正后的重建结果[29]Fig.7 Experimental demonstration result of airborne three-dimensional ghost imaging lidar at 1.04 km range.(a)Testing target;(b)Reconstruction result without signal correction;(c)Reconstruction result with signal correction[29]

图8 激光关联成像雷达系统对编队无人机进行探测与成像实验验证。(a)三架无人机的飞行轨迹测试结果;(b)三架无人机的距离时变图;(c)某一时刻的关联成像结果Fig.8 Experimental demonstration of detection and imaging for three UAVs based on ghost imaging lidar system.(a)Testing result of flight trajectory of three UAVs;(b)Diagram of distance-time;(c)Ghost imaging result at a certain time
2 长脉冲外差探测体制激光关联成像雷达
窄脉冲直接探测体制激光关联成像雷达通过时域测量的方式获取目标距离信息,而长脉冲外差探测体制激光关联成像雷达的距离信息是通过时域调制信息与目标回波信号的相关测量而获得的。根据外差探测方式的不同,长脉冲外差探测体制激光关联成像雷达主要分为两种工作方式:(1)长脉冲电子外差探测激光关联成像雷达,采用目标回波电信号与时域调制电信号进行相关测量[27];(2)长脉冲光外差探测(通常也称“相干探测”)激光关联成像雷达,采用目标回波光场与本征光场的平衡探测方式提取目标信息[28]。相比于第一种工作方式,长脉冲光外差探测激光关联成像雷达具备更高维的信息获取能力和更强的抗背景光干扰能力,具有更好的应用前景。
2.1原理方案
2.2近期主要研究进展
2.2.1 电子外差探测激光关联成像雷达研究进展
类似于窄脉冲直接探测体制激光关联成像雷达,我国在长脉冲外差探测体制激光关联成像雷达方面也率先开展了相关研究工作。2013年,中国科学院上海光学精密机械研究所在国家863计划项目“激光三维强度关联成像技术研究”的支持下率先开展了外差探测激光关联成像雷达研究。2015年,哈尔滨工业大学开展了电子外差探测激光关联成像的初步理论分析和数值模拟研究,数值模拟验证了高分辨三维成像的可行性[27],如图10所示。图10(a)为电子外差探测激光关联成像原理方案,图10(b)为测试靶标(处于不同探测距离上的“HIT”三个字母),图10(c)为关联成像结果。2017年,中国科学院上海光学精密机械研究所理论分析了背景光对窄脉冲直接探测激光关联成像雷达、电子外差探测激光关联成像雷达和光外差探测激光关联成像雷达成像质量的影响,其数值模拟结果如图11所示[32]。图11(a)的结果表明窄脉冲直接探测激光关联成像雷达要求辐照信噪比(信号光与背景光强度比值)大于10 dB才能获得较好的成像结果,而图11(b)和图11(c)所示的电子外差探测激光关联成像雷达和光外差探测激光关联成像雷达在辐照信噪比分别为−20 dB和−30 dB条件下所获得的成像结果与窄脉冲直接探测激光关联成像雷达在辐照信噪比为10 dB条件下的成像质量相当,从而验证了光外差探测激光关联成像雷达具备较强的抗背景光干扰和隐秘探测能力。紧接着该单位又开展了光源调制性能(如起始调制深度、调制深度衰减系数、频率变化率)和探测器带宽等参数对电子外差探测激光关联成像质量影响的理论和数值模拟仿真分析[33],并搭建了一套原理验证综合实验平台,实验验证了理论和数值模拟结果的正确性,在辐照信噪比为−30 dB的条件下仍然获得了较好的成像结果[34],如图12所示。图12(a)为所搭建的电子外差探测激光关联成像综合实验平台光学结构图,图12(b)为不同辐照信噪比的关联成像结果。

图10 电子外差探测激光关联成像数值模拟验证。(a)电子外差探测激光关联成像原理方案;(b)测试目标;(c)三维关联成像结果[27]Fig.10 Simulation demonstration of heterodyne ghost imaging.(a)The principle scheme of heterodyne ghost imaging;(b)Testing target;(c)Three-dimensional ghost imaging result[27]
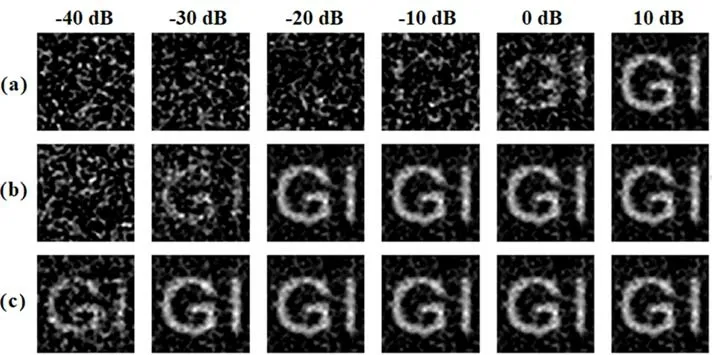
图11 辐照信噪比对不同探测模式激光关联成像雷达性能影响数值模拟结果。(a)窄脉冲直接探测激光关联成像雷达成像结果;(b)电子外差探测激光关联成像雷达成像结果;(c)光外差探测激光关联成像雷达成像结果[32]Fig.11 Simulation results of the influence of irradiation signal-to-noise ratio on ghost imaging lidar with different detection modes.(a)Result of narrow pulsed ghost imaging lidar;(b)Result of heterodyne ghost imaging lidar;(c)Result of pulse-compression ghost imaging lidar[32]
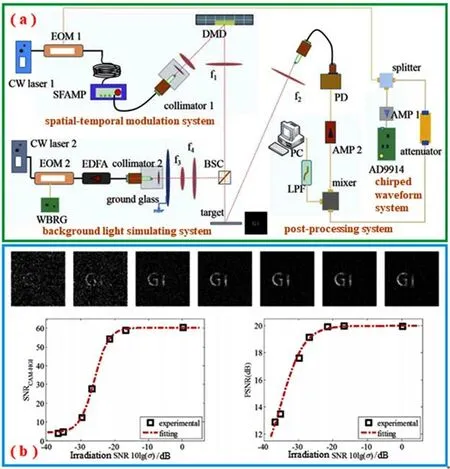
图12 不同辐照信噪比下的电子外差探测激光关联成像实验验证。(a)电子外差探测激光关联成像综合实验平台光学结构图;(b)不同辐照信噪比下的关联成像结果[34]Fig.12 Experimental demonstration of heterodyne ghost imaging lidar in different irradiation SNR.(a)Optical schematic diagram of heterodyne ghost imaging lidar experimental platform;(b)Ghost imaging result in different irradiation SNR[34]
2.2.2光外差探测激光关联成像雷达研究进展
2016年,中国科学院上海光学精密机械研究所将脉冲压缩技术、相干探测方法和激光关联成像结合起来,率先公开报道了光外差探测激光关联成像雷达方案,从理论上分析了光外差探测激光关联成像和解决多目标探测距离-速度耦合问题的可行性,并且通过数值模拟进行了验证[28]。图13为不同点探测器数目下的光外差探测激光关联成像数值模拟结果。待测目标由轴向距离分别为199.9、200、200.3 m且空间上不遮挡的三组双缝组成,光源时间上采用啁啾调幅方式,调制带宽为1 G。图13(a)为采用单个点探测器下的目标回波信号和差分关联成像重建结果,图13(b)和图13(c)分别为采用10和100个点探测器时所对应的目标回波信号和关联成像结果。可以看出:由于系统距离分辨率为0.15 m,则目标1和2在强度谱上不可区分(对应P1),而目标3和目标1、2在强度谱上可分离(对应P2);同时随着点探测器数目的增加,关联成像质量将会得到提升。

图13 不同点探测器数目下的光外差探测激光关联成像雷达数值模拟结果[28]Fig.13 Simulation results of pulse-compression ghost imaging lidar in different number of single-pixel detectors[28]
基于图9的原理装置,中国科学院上海光学精密机械研究所搭建了如图14(a)所示的探测波长为1.55µm、调制时长为500µs、接收单模光纤芯径为10µm下的光外差探测激光关联成像实验装置,给出了接收信号光功率依次为5∼1900 pW下的激光关联成像结果[35],如图14(b)所示。可以看出:在接收信号光功率为5 pW[图14(b)(1)]时,仍可以较好地重构出目标图像。此外,将待测目标固定于喇叭上,通过喇叭的振动传导到待测目标上而模拟目标的微振动情形,基于图14(a)的光外差探测激光关联成像实验平台,开展了微振动目标激光关联成像初步实验研究,如图15所示,验证了光外差探测激光关联成像雷达具有可同时获取目标图像和微振动信息的能力[48]。

图9 基于幅度调制的长脉冲光外差探测激光关联成像雷达原理方案结构图[28]Fig.9 Principal schematic diagram of long pulse-compression ghost imaging lidar via amplitude modulation[28]

图14 不同接收信号光功率下的光外差探测激光关联成像实验结果。(a)光外差探测激光关联成像实验结构图;(b)不同接收信号光功率下的关联成像重建结果[35]Fig.14 Experimental results of pulse-compression ghost imaging in different receiving echo power.(a)Experimental schematic diagram of pulse-compression ghost imaging;(b)Reconstruction results of ghost imaging in different receiving echo power[35]

图15 微振动目标激光关联成像实验结果。(a)实验结构图;(b)解译后的目标微振动信号;(c)测试目标;(d)重建结果[48]Fig.15 Experimental results of ghost imaging for micro-vibration target.(a)Experimental schematic diagram;(b)Recovered micro-vibration of the target;(c)Testing target;(d)Reconstruction result[48]
3 激光关联成像亟需解决的问题和发展趋势
3.1现有激光关联成像雷达技术特点对比
根据已有的研究成果,窄脉冲直接探测激光关联成像雷达(Pulsed GI lidar)、电子外差探测激光关联成像雷达(Heterodyne GI lidar)和光外差探测激光关联成像雷达(Pulse-compression GI lidar)的技术特点对比情况如表1所示。根据图1、图9和图10,Pulsed GI Lidar的距离信息提取基于飞行时间的光场强度测量且只需对光场进行空间调制,整个系统结构、光场调控和数据处理均相对简单;Heterodyne GI Lidar的距离信息提取基于光场强度的电子外差测量,需要对光场进行时间和空间两维调制,与Pulsed GI Lidar相比,等价于增加了回波信号的脉冲积分时间进而达到提升探测信噪比的目的。Pulse-compression GI Lidar的距离信息提取基于光场的相干测量,可以获取回波信号的光场振幅和相位信息,因此除了目标距离、速度和图像信息获取之外,还可以获取目标的微振动信息;同时由于回波光信号进入探测器之前有本征光的放大作用,故具备更高的探测灵敏度。然而,Pulse-compression GI Lidar系统结构和数据处理相对复杂,且与Pulsed GI Lidar和Heterodyne GI Lidar相比,Pulse-compression GI Lidar为了保证探测的相干性,存在成像视场与接收口径相互制约的矛盾,所以接收系统口径通常比较小,导致接收效率比较低。此外,Heterodyne GI Lidar和Pulse-compression GI Lidar采用了时域相关测量,可以有效过滤背景光,故相比于Pulsed GI Lidar具备更强的抗背景光干扰能力,即使在辐照于目标上的信号光比背景光弱很多的情况下仍可以获取目标信息,具备较好的隐秘性。
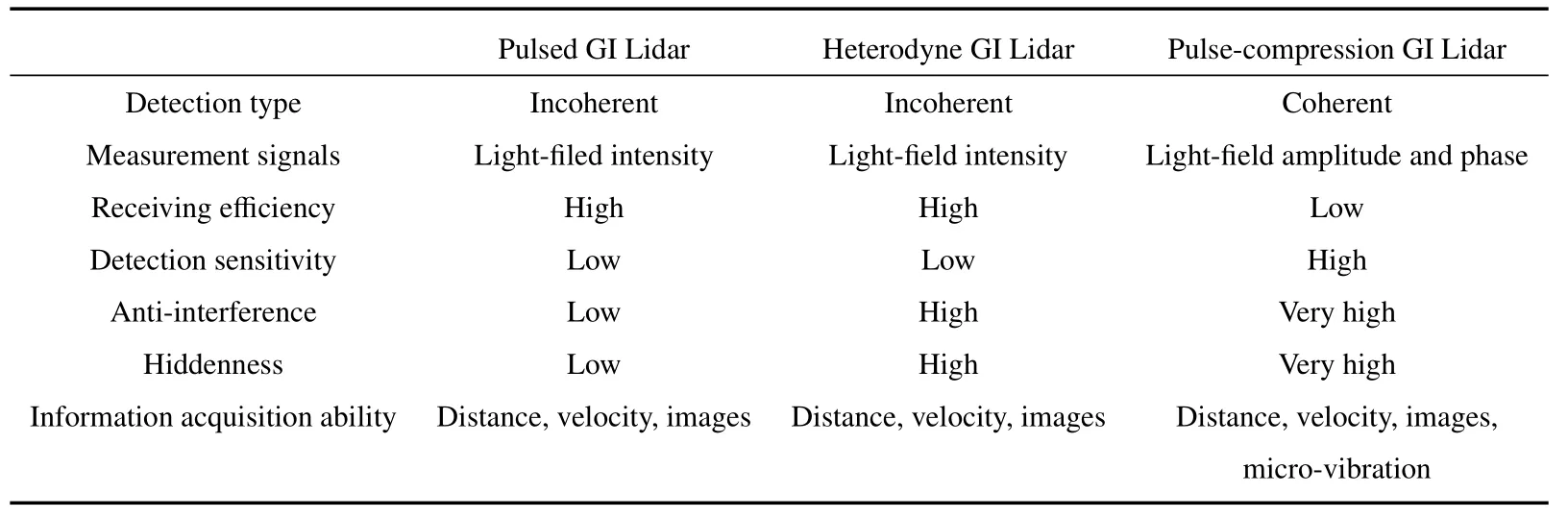
表1 三种激光关联成像雷达技术特点对比Table 1 Technology comparison of three kinds of ghost imaging lidar
3.2亟需解决的问题及发展趋势
总的来说,窄脉冲直接探测体制激光关联成像雷达已经开展了较为深入的研究,处于面向典型应用场景进行演示验证和应用转化的发展阶段;而长脉冲外差探测体制激光关联成像雷达还处于初级研究阶段,但由于其具备更多的技术优势,应用场景将更为广阔,且单光子水平下的光外差探测激光关联成像雷达将成为重点研究对象。然而,要想将激光关联成像雷达应用于远距离、高分辨、高速运动目标探测与识别,仍然存在诸多科学和技术问题亟需梳理和解决,主要表现在以下几个方面:
(1)具备“较大视场搜索-跟踪-成像”一体化功能的激光关联成像技术。由于目标处于高速运动状态且探测距离比较远,需解决较大视场的目标快速搜索、基于单帧/极少数帧编码照明和单光子探测灵敏度下的目标跟踪问题,探索成像分辨率不依赖于系统跟踪精度的散斑场照明方式和关联成像方案。
(2)强散射点下的弱目标信息提取问题。激光关联成像雷达采用的是“面”到“点”的探测方式,一方面强散射点信号会限制探测器的增益致使弱信号得不到响应,另一方面强散射点信号的光子散粒噪声会远大于弱信号的光子涨落,导致反射率较低的目标区域信息难以提取,因此需探索有效分离强弱信号的探测方案和应对强散射点问题的成像策略。
(3)高效、鲁棒性强的时空两维光场编码和基于新型材料的高速光场调控。远距离探测通常会经过复杂的大气层,一方面大气散射和大气湍流会导致投射到目标面上的散斑场发生畸变,另一方面大气衰减和光束扩散也会使得到达目标上的光强较弱,致使光子散粒噪声影响较大,这两者均会导致探测信号与调制信号的关联性降低。因此需借鉴通信中的编码和纠错方法,优化设计时空两维光场编码方式和散斑场序列的辐照次序,提升激光关联成像雷达系统的鲁棒性;同时探索基于超构材料或超构表面的新型光场调制器件,发展高能量利用率、MHz调制速率的时空两维光场调控新方法,减少成像所需的采样时间,改善时变环境对关联成像质量的影响。
(4)视频级以上的图像重建算法和较高的成像置信度。需解决百万像素级图像的激光关联成像雷达图像重建算法的硬件化和不小于50 Hz的图像输出问题,厘清激光关联成像雷达系统的信息获取能力上限,给出关联成像图像重建结果的置信度与定量评价标准。
(5)多维信息融合处理与特征信息快速提取。激光关联成像雷达的回波信号中含有目标的距离、速度、微振动、反射率等信息,需厘清该成像体制下目标图像、距离、速度、振动等信息的耦合规律,将这些信息的耦合关系作为先验信息用于关联成像的图像重建和融合处理,实现高维信息的表征、特征信息的分离和快速提取,以适用于不同场景下的实际应用需求。
总之,激光关联成像雷达是一种基于电磁场的相干性理论和现代信息处理方法而发展起来的新型凝视成像体制。经过近年来的持续性研究,该雷达的研究进展最为显著且属于关联成像领域最接近应用转化的成果,但在远距离、高分辨、高速运动目标探测与识别方面,仍然存在诸多有待梳理和解决的关键问题,需要广大科研工作者进一步的创新与努力。
猜你喜欢
数学物理学报(2022年3期)2022-05-25
新世纪智能(数学备考)(2021年9期)2021-11-24
数学物理学报(2019年5期)2019-11-29
当代陕西(2019年15期)2019-09-02
电子制作(2019年15期)2019-08-27
小学生学习指导(低年级)(2018年12期)2018-12-29
学苑创造·A版(2018年11期)2018-02-01
中成药(2017年12期)2018-01-19
读者(2017年5期)2017-02-15
火控雷达技术(2016年3期)2016-02-06