夜间装备运输中对光学侦拍装置的探测干扰实验
2022-12-06 02:18吴冠霖姜浩研金伟其赵益辉李瑞强
应用光学 2022年6期
吴冠霖,刘 璇,姜浩研,金伟其,赵益辉,李瑞强
(北京理工大学 光电学院 光电成像技术与系统教育部重点实验室,北京 100081)
引言
目前各种数字影像产品,如数码相机DC、数码摄像机DV 以及手机相机等得到广泛应用,特别是智能手机几乎全面普及,随时随地可拍摄的特性极大地丰富了人们的生活,抖音等自媒体平台更提升了人们记录身边事物的热情。但是,这也给装备运输带来了额外的风险,如一些大型装备的转移,通常采用铁路和公路运输,即便采用夜间转移运输方式,也难以回避有意者的蓄意偷拍,而且沿途群众也可随时拍摄并放到各种媒体平台,无意中曝露装备转移的信息。因此,如何在装备运输途中及时探测各类数码摄像或照相装置并实施干扰,成为人们关注的课题之一。
在军事上,基于“猫眼效应”的激光主动探测技术是探测定位隐蔽狙击手光电观瞄具的有效方法。典型的装备如法国激光工业公司(CILAS)的SLD 400 装置[1],如图1 所示,采用近红外激光猫眼探测技术,能够在白天1 000 m、夜间3 000 m 的远距离条件下对各类光学瞄准镜进行探测。美国多利松公司MIRAGE 便携式双筒探测系统[2],如图2所示,通过“猫眼效应”向探测区域发射散焦激光并探测光电装备的反射信号,实现隐蔽光电装备的探测。俄罗斯PAPV 便携式激光对抗系统和英国ELLIPSE 反狙击手激光监视装置均采用“猫眼效应”进行目标探测定位,同时增加了对抗、压制等功能。国内许多单位在基于“猫眼效应”狙击手探测技术方面进行了多项研究,部分实现了装备应用。

图1 法国SLD 反狙击手激光探测系统Fig. 1 French SLD anti-sniper laser detection system

图2 MIRAGE 便携式双筒探测系统Fig. 2 MIRAGE portable dual-barrel detection system
在原理上,基于“猫眼效应”的主动激光探测技术也可作为数码侦拍装置探测与干扰的有效技术。光电对抗中主动激光探测系统通常用于敌方目标距离较远,敌方光电系统口径较大,且对抗或压制只需考虑探测器的阈值,不用考虑对装备操作人员是否损伤等情况。但数码侦拍装置,如便携式DC、DV 以及手机相机等通常光学口径较小,距离装备较近,特别是操作者往往是普通百姓(也可能是蓄意者),激光探测及干扰需要避免对操作者造成视觉伤害,且探测需要隐蔽进行(干扰时并不一定需要隐蔽性)。
本文针对装备运输过程中可能遭遇侦拍的风险,结合数码侦拍装置的特点,利用“猫眼”激光主动探测实验系统,对市售的几款消费级侦拍装置进行探测和干扰实验,并分析实验结果,为后续车载防光学侦拍技术研究和装置应用提供实验基础。
1 实验原理
1.1 光学侦拍装置的“猫眼效应”及探测方法
猫眼的视网膜后方存在一个由15 层特殊细胞形成的反射层[3],其中反光物质能够吸收环境背景中的蓝光并向外发射中、长波段的荧光。黑暗环境下猫眼会发光。拥有较高反射率的反射层会将光线沿原路返回,从而形成“猫眼效应”。
如图3 所示,典型光学侦拍装置镜头内部的光学结构与猫眼结构具有一定的相似性,其焦平面处存在可探测的高反射率光敏面(或光学观瞄镜中的分划板[4]等),能够实现入射光的逆向传输[5],形成“猫眼效应”。一般而言,光电装置的后向反射高于夜间环境中目标的漫反射约2~4 个数量级[6],可为光学侦拍装置的“猫眼”探测方法提供基本信号。

图3 “猫眼效应”原理图Fig. 3 Schematic diagram of cat-eye effect
采用基于“猫眼效应”的激光主动探测方法,出射激光束与目标光电装置的光学窗口形成“对视”时,接收装置接收反射回来的激光并加以解析,即可得到目标的方位信息,如图4 所示。
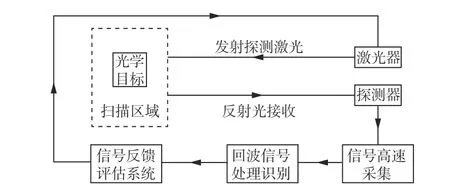
图4 激光主动探测系统工作原理Fig. 4 Working principle of laser active detection system
1.2 常见数码光学侦拍装置及其特点
一般认为感光元件为CCD 与CMOS 的数码侦拍装置具有“猫眼效应”[7]。因此,我们针对市面上常见的4 类主流光学侦拍装置,如智能手机、卡片数码相机、单反数码相机、数码摄像机,选择了4 款实验用产品,其主要参数如表1 所示。

表1 实验产品装置主要参数Table 1 Main parameters of experimental equipment
假设光学系统不存在像差及衍射现象[8],且探测距离较远,当激光沿光学系统光轴方向入射时,基于“猫眼效应”的激光主动探测系统原理如图5 所示。图5 中, S为激光器,主动发射激光对远距离目标进行扫描; D为探测器,用于接收“猫眼”回波信号; L为 理想成像透镜; R为“猫眼”光学系统成像面处的反射元件; F为光学系统理想焦平面;θs为 激光器出射激光的束散角;Re为“猫眼”目标的有效半径; θr′为反射激光半回散角;f′为目标系统物方焦距; ∆R为离焦量引起反射光在成像透镜处的位置改变量; ∆f为系统离焦量。

图5 “猫眼”激光主动探测系统物理模型Fig. 5 Physical model of cat-eye laser active detection system
探测器接收到的回波信号功率[9]可表示为

式中:Pl为 激光器出射功率;τa=exp(−3.912·l/Rv)为大气透过比;Rv为 大气能见距离,单位km;l为激光源到“猫眼”目标的距离; τo为“猫眼”目标光学系统的透过率; τd为探测器光学系统的透过率;Se为 “猫眼”目标有效面积;Sl为激光器在“猫眼”目标处形成的光斑面积;Sd为探测器有效接收面积;Sr为 反射激光在探测器处形成的光斑面积; ρ为“猫眼”目标反射元件的反射率。
设回波信号接收系统中引起探测器感光的最低照度(即最小可探测照度)为Emin, λ波长对应的光谱光视效能K(λ)=C·V(λ)=683V(λ),则探测器的最小可探测功率为[10]

引起回波信号探测器CMOS 感光需满足Pd≥Pdmin,同时还需考虑“猫眼”目标与背景中普通目标之间的差异。由于激光束散角 θs≪1,可看作余弦散射体的普通目标,其散射系数k1远远小于“猫眼”目标中反射元件的反射率k2,因此普通目标的光学返回率R1远 远小于“猫眼”目标的返回率R2[11],即:

因此,主要通过(1)式与探测器的最小可探测功率,判断可否采用基于“猫眼效应”的激光主动探测技术探测目标光学侦拍装置。
在实际应用中,还应综合考虑探测器、目标系统参数与环境背景特性,如激光出射光斑不均匀性、探测器表面形状、目标光学系统像差、气象条件等因素,才能具体判断目标可探测性。本文设计的实验主要研究“猫眼”目标的最小可探测功率及探测激光束散角、目标距离等对装置干扰的影响。
2 实验方案及装置
2.1 探测实验
实验研究4 类典型光学侦拍装置在目标距离为0 ~50 m 范围内的可探测性、隐蔽性以及彩色CMOS 拍摄装置特性。采用近红外(808 nm)激光器发射激光束,“猫眼”探测系统接收回波图像并传输至上位机,完成“猫眼”目标识别工作。
实验通过调整激光器出射方向、束散角及功率,观察“猫眼”探测系统显示的图像,判断图像中是否存在由侦拍装置产生的“猫眼”回波亮斑,分析目标的光电可探测性及最小可探测功率。为了有效消除背景影响,“猫眼”探测系统首先连续采集2 帧有无激光束照射的场景图像,通过2 帧差分消除背景干扰和突出“猫眼”目标,然后通过同态滤波对图像中的暗部细节及亮部细节进行增强,通过高斯滤波消除图像噪声,最终利用图像中最亮点及质心法确定图像中“猫眼”回波光斑的位置及大小。
“猫眼”探测系统由808 nm 激光器(MDL-XF-808-10W)、扩束镜、近红外相机(DALSA 公司NANO系列[12],响应波长400 nm ~1000 nm)组成,如图6所示。激光出射功率采用光功率计(THORLABS公司PM200 型号)及接收靶面(THORLABS 公司S310C 型号)测量。近红外相机通过采集卡连接到上位机中,通过eBUS player 软件采集“猫眼”回波图像,图像存储位数为8 bit,成像帧频为50 f/s。
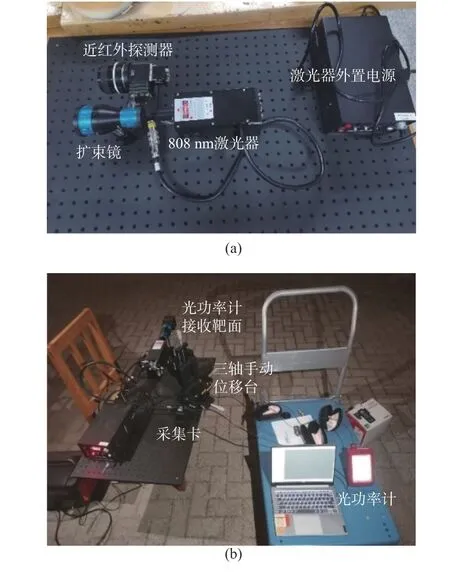
图6 实验用激光探测与测量系统Fig. 6 Laser detection and measurement system for experiment
选取2 种典型夜间城镇环境,第1 个场景目标设置在居民楼窗边,“猫眼”探测系统与侦拍装置间透空,存在灯光干扰,环境照度约为400 lx。第2 个场景“猫眼”探测系统与侦拍装置间存在树木遮挡,目标设置在建筑物墙角,且无灯光照射到目标,环境照度约为50 lx。
2.2 干扰实验
车载防光学侦拍系统需在确认侦拍目标具有可探测性的基础上,进一步实现点对点干扰。实验研究光学侦拍装置受到激光干扰时的成像饱和情况,依次以距离、激光波长、功率、激光光束直径为变量进行实验。由于侦拍装置为彩色CMOS成像,采用红光(650 nm)及绿光(515 nm)激光考察对手机相机、数码相机和摄像机等几种典型数码侦拍装置的干扰有效性,并评价各装置成像的受扰效果。
干扰系统由激光器及配套电源、亮度调节器组成,如图7 所示。选取手机、卡片数码相机、单反数码相机和数码摄像机作为光学侦拍装置,采用国际象棋靶标作为侦拍装置的观测目标。

图7 实验用激光干扰系统及侦拍目标Fig. 7 Laser jamming system and detection target for experiment
近距离实验环境中,目标端照度为0.201 lx。外场实验环境的目标距离约10 m~50 m,激光干扰系统与侦拍装置间透空,目标端照度约为400 lx。
对于干扰图像,采用结合图像整体饱和像素点占比和对应激光波段通道(R/G 单通道)亮度方式评价光学侦拍装置受扰效果,即:

式中:A% 为 图像干扰效果;P为激光干扰图像中灰度值≥150 的像素点数目;Q为受扰图像中R 通道中灰度值≥240 的像素点数目(采用650 nm 干扰激光),或G 通道中灰度值≥150 的像素点数目(采用515 nm 干扰激光);M×N为图像分辨率。
3 实验结果与分析
3.1 探测实验结果与分析
当功率为3 mW、波长为808 nm 激光照射在50 m 距离处的各侦拍装置镜头处时,“猫眼”探测系统接收到的回波图像如图8 所示。从图8 可以看出,直接拍摄图像的黑色背景中出现明显亮斑,经过图像处理的“猫眼”目标识别结果更为清晰,即4 类目标在距离为50 m 以内均具有良好的光电可探测性,产生“猫眼”回波前后图像光斑最亮点的灰度值差约为119。

图8 光学侦拍装置“猫眼”回波图像及识别结果Fig. 8 Echo images and identification results of cat-eye ofoptical surveillance device
根据标准IEC 60825-1[13],采用保守默认值估计,夜间一个静止不动的观察者能够观测到行进中的装备运输车辆的时间不超过20 s,选取人眼暴露在激光辐射范围内的时间区间为10 s~100 s。此时,波长在700 nm~1 050 nm 范围内的激光最大 允 许 照 射 量(MPE)为 10C4C7W·m−2,其 中C4=100.002(λ−700),C7=1。计算可得实验采用808 nm 激光器的MPE 值为16.44 W·m−2,低于该值可确保即使人员暴露在激光中,一段时间内角膜和皮肤也不会受到明显伤害。
距离激光源r处的辐照度E可表示为[14]

式中:P0为连续激光器的辐射通量; µ为激光器对应波长的大气衰减系数;r表示观察端与目标端的距离;a为激光器出射光束直径; φ为激光束散角。
由于实验距离较近,可近似忽略大气衰减损耗µr,即e−µr≈1,计算可得10 m 处激光辐照度为

由(6)式可知,出射功率为3 mW 时,在10 m及更远距离中实验激光器符合安全标准。
3.2 干扰实验结果与分析
3.2.1 距离对干扰效果的影响
为研究各距离点光学侦拍装置受扰情况,以数码摄像机为例,选用红光激光器(波长650 nm、功率5 mW、束散角为0.2 rad)进行由远及近(L= 50 m,40 m, 30 m, 20 m 和10 m)的室外干扰实验。数码相机端受干扰效果图像如图9 所示。由图9 可以看出,随着实验距离的减小,可用于模拟公共监控的数码摄像机被干扰的范围越来越大,图像大部分区域过曝,激光器附近作为观察目标的国际象棋靶板和近处分辨力靶标完全不可见。

图9 数码摄像机(模拟公共监控)在不同距离上受红光激光干扰成像效果Fig. 9 Imaging effect of digital camera (analog public surveillance) by red laser jamming at different distances
典型侦拍装置的图像干扰效果如表2 所示。由表2 可以看出,4 类光学侦拍装置的图像干扰效果均随距离增加而减小,且仅单反数码相机在40 m和50 m 处尚能辨别分辨力靶标部分图案,其他干扰图像目标区域均无法观测到实验目标,即单反相机的抗干扰性能优于其他3 类常见侦拍设备。实验还发现,干扰效果受到激光在相机成像区域中落点位置的影响,落点越靠近视场中心,干扰效果越明显。

表2 远距离下5 mW 红光激光图像干扰效果Table 2 Remote image jamming effect under 5mW red laser
在此,本文提出一种判断侦拍装置是否被有效干扰的定量化标准。取实验图像内80%像素点不可见(灰度值≥200 或≤50)时的图像干扰效果百分比作为有效干扰阈值,经数据分析,当激光光斑完全覆盖光学侦拍装置镜头CMOS 时,有效干扰阈值与侦拍装置屏幕分辨率正相关。计算公式如下:

式中:Al%为远距离下对应侦拍装置的有效干扰阈值;D为探测器分辨率;C3、C4均 为常数项,C3=2.762×10−8,C4=0.114 4。采用该参数评价时,实验中卡片数码相机有效干扰阈值为67%,数码摄像机为37%,单反数码相机为78%,智能手机为18%。当图像干扰效果百分比高于有效干扰阈值时,可认为干扰有效。
根据标准IEC 60825-1[13],同样采用保守默认值估计,暴露时间为10 s~3×104s,波长在400 nm~700 nm 范围内的激光最大允许照射量(MPE)为10 W·m−2。计算实验中10 m 处激光辐照度为

由(8)式可看出,实验中激光器符合安全标准。若需进一步提高干扰效果,可在不超过MPE标准的前提下适当提高出射激光功率,或增加干扰系统出射激光束的直径,扩大红光干扰时的中心亮斑区域。
在暗室环境中,采用650 nm、5 mW、束散角为2 rad 红色激光光源,光源旁放置国际象棋靶板作为观测目标,另一侧为光学侦拍装置。当激光光束进入镜头时,在光源一端可观测到侦拍装置的图像传感器具有“猫眼效应”。改变实验测试距离,以数码摄像机为例,得到不同距离下干扰效果图像,如图10 所示。

图10 5 mW 红光激光干扰不同距离下手机成像效果图Fig. 10 Imaging effect of mobile phone by 5 mW red laser jamming under different distances
经程序处理得到5 mW 红光激光干扰源在不同距离下4 类侦拍装置(均采用自动对焦模式)的图像干扰效果,如表3 所示。

表3 不同距离下5 mW 红光激光图像干扰效果Table 3 Jamming effect of 5 mW red laser under different distances
从表3 可以看出,在2 m 范围内,5 mW 红光激光干扰源与侦拍目标距离越远,图像传感器分辨率越低,像元面积越小,目标成像效果越差,干扰效果越好。同时在实验中发现,激光入射角对干扰效果有较大影响。干扰激光无法完全覆盖镜头时,图像干扰效果与镜头大小及分辨率呈负相关。近距离下,有效干扰阈值计算公式如下:

式中:As%为近距离下对应侦拍装置的有效干扰阈值;S为光学侦拍装置的CMOS 尺寸;D为探测器的分辨率;C1、C2均 为常数项,C1=9.841×10−11,C2=0.198。采用该参数进行评价,实验采用卡片数码相机有效干扰阈值为20%,数码摄像机为19%,单反数码相机为98%,智能手机为16%。除具有高分辨率和大通光口径的单反镜头在近距离下体现出了良好的抗干扰性能,其余实验装置有效干扰阈值均下降,更易实现干扰目标。
3.2.2 波长对干扰效果的影响
在暗室环境中,采用功率5 mW、波长515 nm绿色半导体激光光源作为干扰光源,对光学侦拍装置进行干扰,考察不同距离下的干扰效果。图11给出对单反数码相机的干扰效果图像。


图11 5 mW 绿光激光干扰不同距离下单反数码相机成像效果图Fig. 11 Imaging effect of digital DSLR camera by 5 mW green laser jamming under different distances
综合分析实验数据,对于绿光激光干扰,在相同距离下,智能手机和单反数码相机的图像干扰效果百分比高于5 mW 红光干扰,数码摄像机和卡片数码相机低于红光。排除计算灰度阈值选择误差,各光学侦拍装置的子像素布局不同,彩色映射方式不同[15],前两者对绿色通道占比大于后两者,且不同激光入射各装置的像素阵列形成的衍射斑形状不同。与同功率同距离(>20 cm)下650 nm 红光干扰相比,各装置图像干扰效果均上升5%左右,即绿光激光对于此实验中目标的遮盖性更强。
实验中选取功率可调的808 nm 近红外激光光源照射4 类光学侦拍装置,图12 给出了不同功率照射下卡片数码相机的成像效果。实验结果表明,数码摄像机和卡片数码相机的CMOS 对808 nm波段及附近波段有一定响应,产生淡紫色光晕,且光晕大小随激光功率增大而变大。但该波段激光对单反相机和手机的成像效果无明显影响,这是由于为避免红外光对正常成像光线的干扰,通常都会在两者传感器前安装红外滤光片[16],阻止近红外光直接照射镜头组内部CMOS。因此,若需保证对侦拍装置干扰效果的普适性,不建议采用近红外激光作为干扰源。

图12 不同功率808 nm 近红外激光照射下卡片数码相机成像效果Fig. 12 Imaging effect of card DC under different power 808 nm near infrared laser irradiation
3.2.3 激光束散角对干扰效果的影响
改变出射激光束孔径,评价其对不同侦拍装置的干扰效果,图13 给出卡片数码相机的干扰实验效果图,其他装置的干扰效果如表4 所示。

图13 不同束散角下5 mW 绿光激光对卡片数码相机的成像干扰效果Fig. 13 Jamming effect of 5 mW green laser on card DC under different beam dispersion angles

表4 不同束散角下5 mW 绿光激光对图像的干扰效果Table 4 Jamming effect of 5 mW green laser under different beam dispersion angles
在4 类光学侦拍装置均采用自动对焦模式下,从图像整体亮度值和绿色通道亮度的成像饱和像素点占比角度来看,激光束散角越小,目标成像效果越差,干扰效果越好。同时实验发现,镜头聚焦激光能够有效降低除光斑外画面的清晰度,起到较好的干扰效果。考虑大部分人员拍摄时采用系统默认的自动对焦模式,防侦拍系统可在一定角度范围内持续改变激光出射方向,使镜头自动跟随并聚焦于激光光束上,起到对实际运输物品的保护作用。
4 结论
针对装备运输中光学侦拍的探测和干扰问题,本文通过搭建“猫眼”探测与干扰系统,对市面上4 类典型消费级光学侦拍装置的光电可探测性和成像干扰进行了实验研究。在自然光照条件下,覆盖居民楼旁有无遮挡及灯光干扰2 种典型夜间城镇环境,采集侦拍装置的“猫眼”回波图像,得到不同功率下目标距离50 m 以内光电装置的可探测性,初步实现了目标识别功能,证明了基于“猫眼效应”的激光主动探测技术探测光学侦拍目标等小口径目标的可行性。本文进一步研究了光学侦拍干扰技术,采集不同距离、不同激光功率与束散角、不同波段激光对侦拍装置的成像干扰情况,即距离越近,束散角越小,波段越接近人眼敏感程度最大波段(555 nm),激光束产生的非伤害性成像干扰效果越好。提出了一种目标成像干扰效果评价方法,并给出了典型光学侦拍装置的干扰阈值。
鉴于典型侦拍装置大多为消费级彩色数码成像装置,通过近红外激光的“猫眼效应”进行侦拍装置的探测,利用红光或绿光激光器对探测到的侦拍装置进行拍摄干扰,这种模式是防范装备运输中偷拍现象的可行模式之一。本文实验初步证明了这一模式的有效性,为后续相关技术的深入研究和装备研制提供了实验基础。
致谢:对北京信息科技大学光电学院夏润秋老师在实验“猫眼”探测系统方面给予的支持表示感谢。
猜你喜欢
初中生学习指导·中考版(2022年4期)2022-05-12
中学生数理化(高中版.高考理化)(2021年5期)2021-07-16
科学大众(2020年23期)2021-01-18
奥秘(创新大赛)(2020年11期)2020-12-03
小学阅读指南·低年级版(2017年12期)2017-12-26
小学生导刊(2017年17期)2017-05-17
Coco薇(2016年8期)2016-10-09
航天返回与遥感(2014年1期)2014-07-31
自动化博览(2014年12期)2014-02-28
移动一族(2009年3期)2009-05-12