
考虑道路扬尘特性的环境空气质量在线监测方法
2022-12-05 05:08王月秋
环境监控与预警 2022年6期
王月秋
(唐山市生态环境局玉田县分局,河北 唐山 063000)
在人类的日常生活和生产过程中,汽车尾气、工业污染、垃圾焚烧以及道路扬尘等均是造成空气污染的主要因素[1-3]。其中,道路扬尘是路面尘土在风力作用下进入大气中而形成的悬浮颗粒物,具有显著的开放性特性。道路扬尘存在一次、二次扬尘过程,严重时,会使空气污浊,甚至诱发呼吸疾病。在建筑施工过程中,会产生大面积的开放性扬尘场所[4],若不及时治理,将会对空气质量产生较大影响。空气质量在线监测是一种实时掌控空气质量情况的方法,可利用多传感器和长短期记忆模型(LSTM)等实现监测目的[5-6]。
现有监测方法对于造成空气污染、影响空气质量的道路扬尘等因素的考虑较少。现考虑道路扬尘的影响因素,构建一种考虑扬尘特性的空气质量在线监测方法,该方法通过检测扬尘颗粒物浓度,能够完成空气质量的预测,实现道路扬尘的在线监测。
1 考虑扬尘特性的环境空气质量在线监测方法
1.1 在线监测框架
考虑扬尘特性的环境空气质量在线监测框架示意见图1,该框架包含3个部分:前端数据监测模块、监测通信模块和云服务器。

图1 考虑扬尘特性的环境空气质量在线监测框架示意
(1)前端数据监测模块:该模块的主要作用是对大气环境进行监测,包括传感单元、嵌入式工控机。其中,传感单元主要由多种传感器组成,包含温度、湿度、气压、噪声、风速、风向、颗粒物浓度等传感器[7],采用RS232接口实现通信。嵌入式工控机具备数据采集、解析、存储、传输等功能,其中,采用光全散射法检测道路扬尘的颗粒物。
(2)监测通信模块:该模块作为中间模块,依靠通用分组无线业务(GPRS)和互联网,实现前端数据监测模块和云服务器之间的通信,其中GPRS主要采用RS232接口实现通信,该接口具备数据传输、控制、设置等功能[8]。
(3)云服务器:其主要作用是对前端数据监测模块监测的大气环境数据进行预测[9],判断空气质量,同时对超过阈值的结果进行空气质量预警,完成预测数据的存储。
1.2 基于光全散射法的道路扬尘监测
由于扬尘进入空气后,会形成漂浮颗粒物,因此,可将道路扬尘监测视为颗粒物监测[10]。引入光全散射法,将入射光作用在大气环境中,当光通过存在颗粒物的环境空间后,在消光作用下,其强度逐渐减弱。如果已知颗粒物的成分和折射率,那么颗粒物的大小和浓度则是直接影响光减弱程度的主要因素[11]。以朗伯-比耳定律为依据,设λ为光的波长,L为待检测颗粒物的厚度,前者穿过后者时,会产生2种光强,即入射光强和透射光强,两者之间的关联见式(1)。
(1)
τ的计算公式见式(2)。
(2)
式中:N——单位体积内不同粒径颗粒物的总数;D——粒径尺寸;Dmax、Dmin——粒径的最大和最小值;m——复折射率;Kext(λi,m,D)——D、λi和m的消光系数。N(D)——颗粒数量频率分布系数,为避免发生测量误差,采用非独立模式算法计算。
假如N(D)符合双峰-对数正态分布,则计算公式见式(3)。
(3)
式中:D1、D2——颗粒尺寸参数;A——权系数;σ1、σ2——分布参数。
实际应用过程中,用体积分布取代颗粒物数量分布,结合公式(1)和公式(2)构建目标函数,其公式见式(4)。
(4)
采用多波求解方法,对公式(4)进行求解。由于N、A、σ1、σ2均为待求参数,因此,为实现公式(4)的值最小,结合颗粒尺寸参数,对上述参数实行调整,保证调整后的参数值为最优值。
在得出公式(4)的结果后,计算大气颗粒物的质量浓度(Cm)和密度(ρ)[12]。计算公式见式(5)。
(5)
结合N(D)的计算结果,以监测点为原点,以光波长为半径,将其看作一个包含6个部分的三维球体空间,空间内的体积等同于容积,大气颗粒物密度ρ已知,在保证6个目标函数皆为最优值的情况下,即可计算道路扬尘分布密度。
1.3 环境空气质量预测
1.3.1 基于极限学习机神经网络的预测模型
采用极限学习机神经网络,对环境空气质量进行预测,以此获取空气质量在线监测结果。

(6)
式中:j=1,2,…,N;βi、αi——连接权值,前者对应输入,后者对应输出,均属于第i个隐含层;bi——偏置。采用矩阵的方式描述上述公式,见式(7)。
(7)
设误差平方和用E(W)表示,属于期望值和实际值之间,定义其为代价函数,获取最佳权值W=(α,b,β)即完成求解,实现E(W)最小化前提下,模型公式见式(8)。
(8)
式中:εj——第j个样本的误差。
1.3.2 基于自适应粒子群的预测模型优化
为提升模型对空气质量预测的可靠性,采用自适应粒子群优化算法,对预测模型的权值实行优化,提升预测结果的可靠性[13]。
设n为粒子数量,由其组成种群规模Y=(Y1,Y2,…,YK),其中K表示空间维数,则Yi=(yi1,yi2,…,yiK)可表示第i个粒子的位置,Vi=(vi1,vi2,…,viK)则表示速度,当前最佳位置用Pi=(pi1,pi2,…,piK)和Pg=(pg1,pg2,…,pgK)表示,前者对应第i个粒子,后者对应所有粒子。前者的位置和速度的更新公式见式(9)和式(10),该更新在K维空间内完成。
(9)
(10)
式中:r1、r2——随机数,取值范围为[0,1],两者需要服从均匀分布;ω——惯性权重,表示可扩展粒子的搜索空间,本研究采用自适应ω,使其在迭代次数的增加下,逐渐下降,计算公式见式(11)。
(11)
式中:ω0、ωf——ω的初始值和最终值;t、tmax——当前迭代次数和最大迭代次数。
c1、c2均为学习因子,其用于粒子的加速系数,本研究采用自适应学习因子,以此保证算法的全局检索性能,两者的计算公式见式(12)和式(13)。
(12)
(13)
式中:c1f、c1i、c2f、c2i均为常数。
粒子在搜索过程中,通过公式(10)完成速度更新,在实行位置更新时,需要以速度更新为基础,采用映射的方式实现,且映射区间为[0,1],依据该映射概率确定位置的最终更新结果[14],通过Sigmoid函数完成映射,计算公式见式(14)。
(14)
在上述内容的基础上,即可计算优化后的权值(yij),计算公式见式(15)。
(15)
2 测试分析与结果
2.1 样品采集与参数设置
以某城市为研究对象,测试本方法在环境空气质量在线监测中的应用效果。通过本方法,布设9个监测点位(图2),采集环境空气质量数据,采集时间为1个月,每小时采集1次,共有6 480组数据。大气数据以该市生态环境局发布的行政区内每小时更新的为主,共有5 430组数据。将上述数据进行归一化处理后,共形成2 160组数据;将这些数据的20%作为测试集,剩余的80%作为训练集。
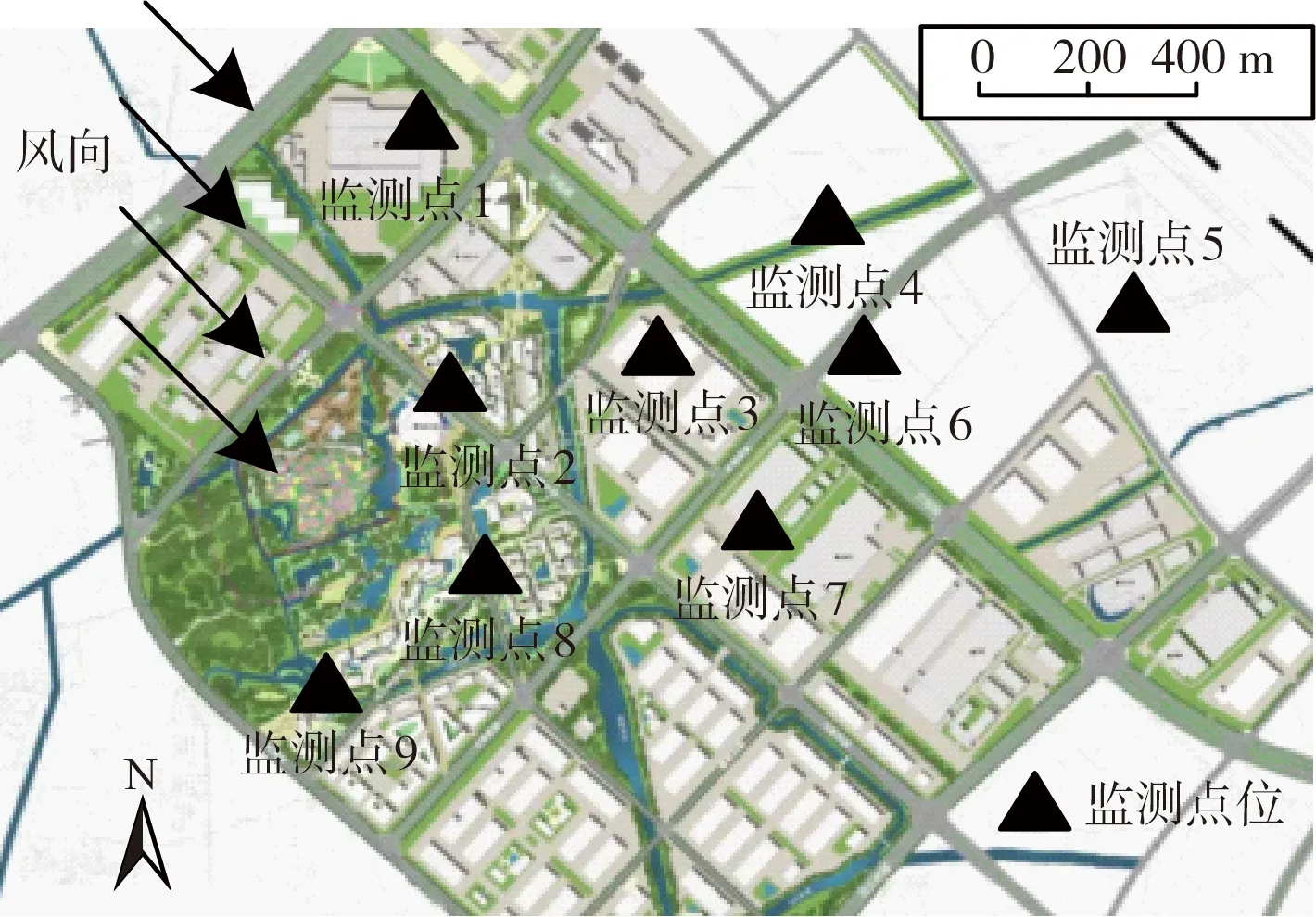
图2 监测点位示意
参数设置:最大迭代次数为120次,种群规模为15,输入、隐含和输出3个层次的神经元数量分别为5,35和1,训练次数为5 000次,训练目标为误差<0.1%。
2.2 学习速率取值
进行监测前,需要确定学习速率取值,以训练目标误差为衡量标准,测试在不同的学习速率取值下的误差结果,见图3。
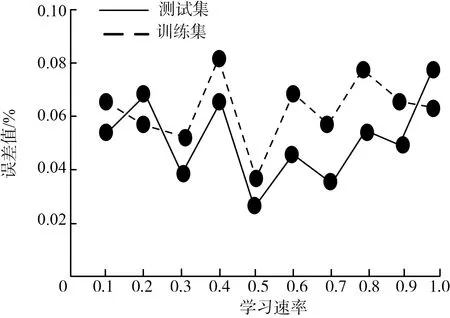
图3 学习速率测试结果
由图3可见,训练集和测试集随着学习速率取值的逐渐增加,发生无规则的波动变化,在取值为0.05时,训练集和测试集的误差均低于目标误差结果,取两集误差最低值对应的学习速率0.5,用于整个实例测试中。
2.3 颗粒物浓度和密度测试
为测试方法对颗粒物浓度和密度的测试效果,对测试集进行计算,将计算结果与实测结果进行对比,见图4。
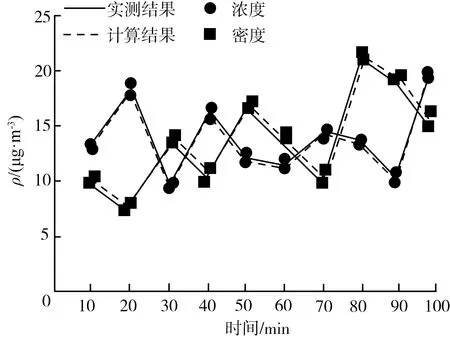
图4 颗粒物浓度和密度测试结果
由图4可见,计算得出的颗粒物浓度和密度结果与实测结果的吻合程度较高,表明本方法对颗粒物浓度和密度的检测效果良好,结果可信度较高,能够为空气质量预测提供准确的数据依据。
2.4 监测性能评价
采用解释方差作为评价指标,对方法优化前后的监测性能进行评价,计算公式见式(16)。
(16)
式中:VAF——解释方差;var——方差函数;y*——预测值;y——观测值。解释方差越大表示预测效果越差,反之则越好,该指标的期望标准为<3.5%。
依据公式(16)获取方法在不同的样本数量下,优化前后对细颗粒物(PM2.5)、可吸入颗粒物(PM10)、二氧化硫、一氧化碳、二氧化氮的解释方差测试结果,见图5。

图5 解释方差测试结果
由图5可见,优化前VAF的结果均高于期望标准,优化后VAF的结果均低于期望标准(<2%),优化后的方法能够更好地完成环境空气质量监测。
2.5 监测效果评估
对不同风速下,各个监测点扬尘颗粒物的扩散时间进行监测,结果见图6。由图6可见,随着风速的逐渐增加,扬尘颗粒物的扩散时间逐渐减低,表明其扩散速度明显提升。说明方法具备良好的监测效果,能够完成扬尘污染物的实时在线监测。
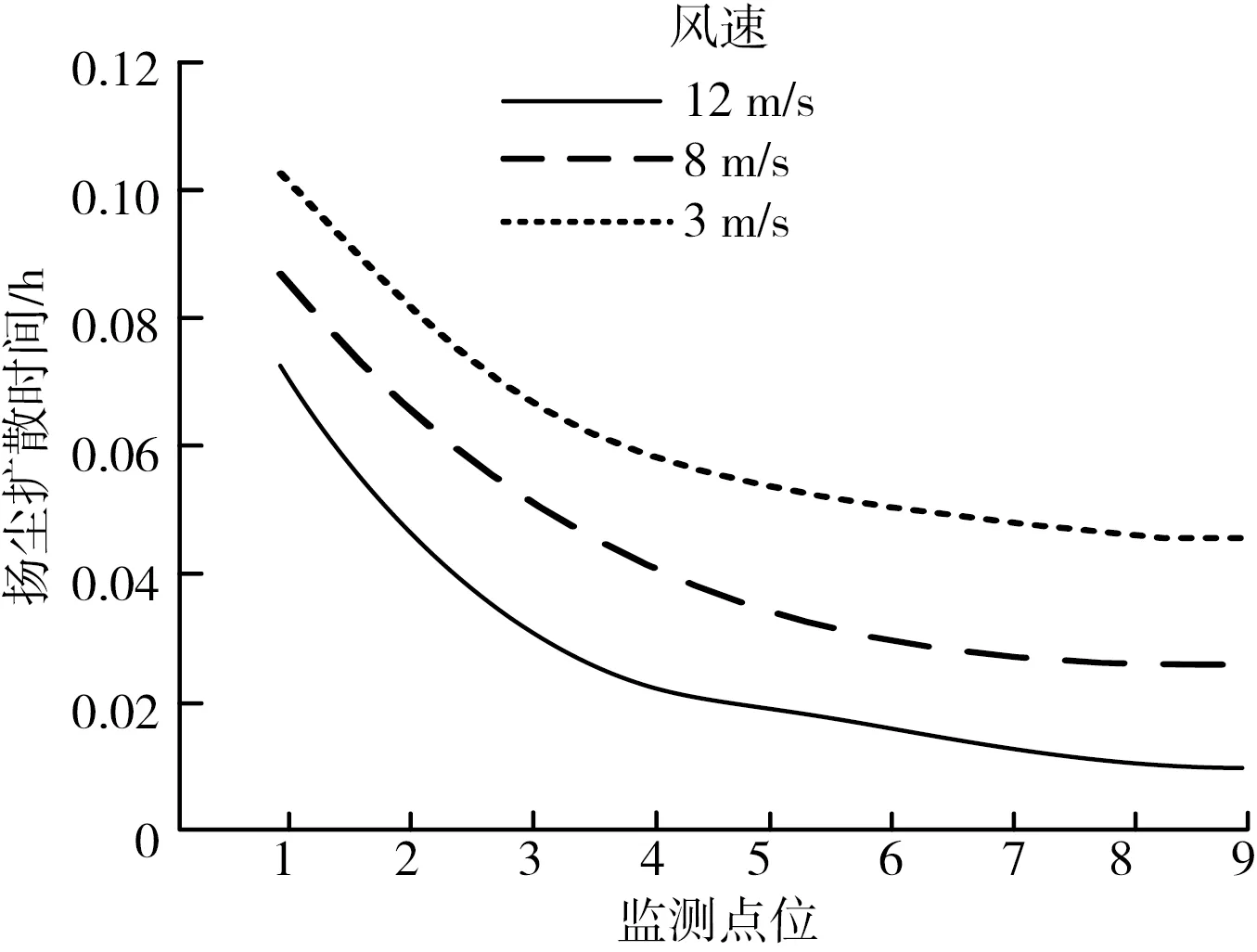
图6 扬尘颗粒物扩散监测结果
2.6 应用性能测试
采用本方法获取测试区域内符合国家空气质量日均值达到一级标准的区域(API=0~50),并将结果与该区域实际发布的结果进行对比,评估方法的应用性,结果见图7。
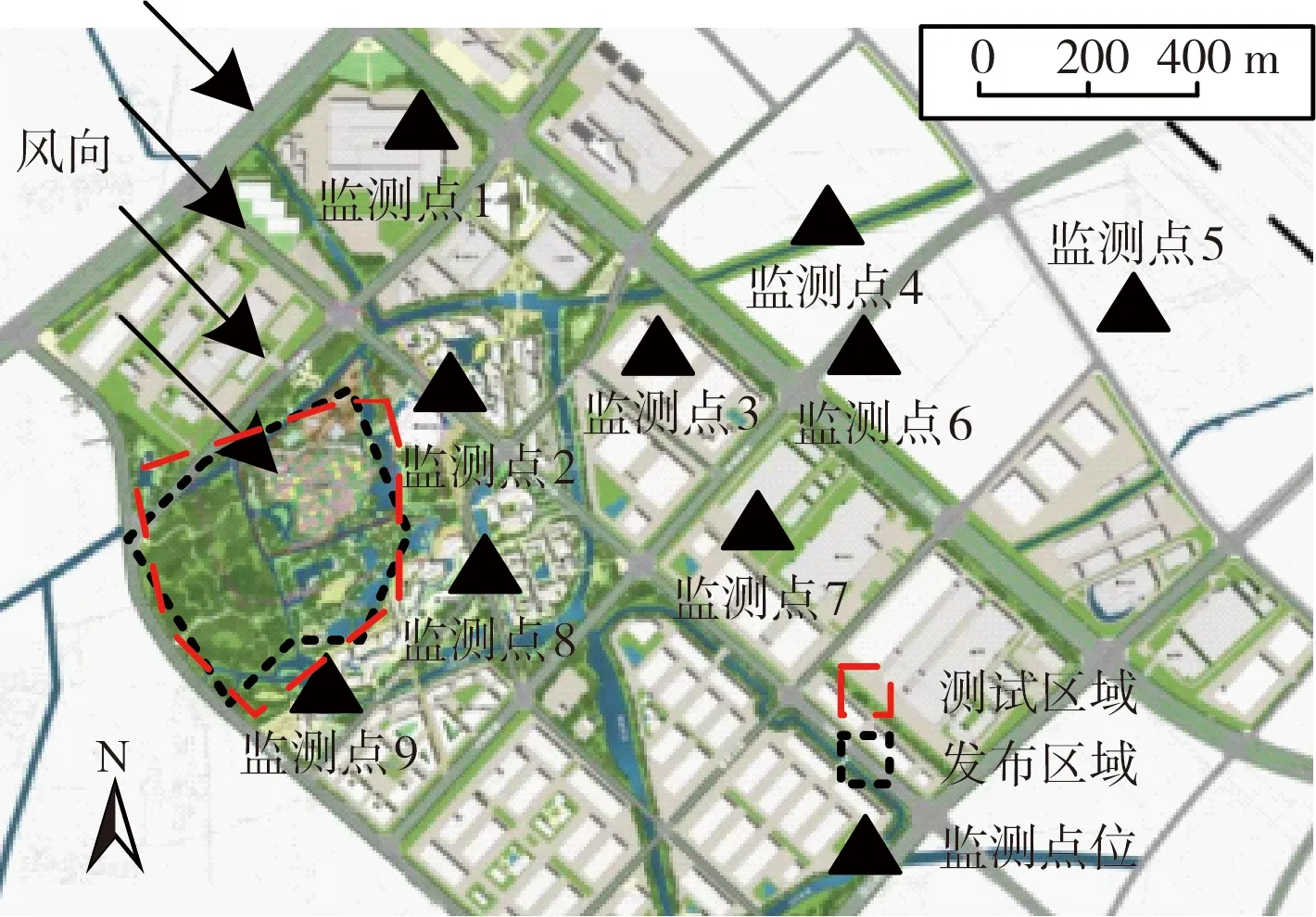
图7 方法应用性测试结果
由图7可见,本方法能够依据监测结果,判断某地区空气质量达到一级标准的区域,与生态环境局实际发布的一级标准区域吻合程度较高。说明方法具有良好的应用性,能够在空气污染的情况下判断适宜的健康活动区域。
3 结语
为实时掌握环境空气质量,构建了研究考虑道路扬尘特性的环境空气质量在线监测方法,该方法以扬尘颗粒物的监测为基础,结合空气质量预测方法,实现了环境空气质量的在线监测。该方法性能可靠,可获取环境空气中污染颗粒物的浓度和密度情况,实现实时监测;对空气质量的预测效果良好,可在误差较小的前提下获取预测结果;同时能够根据监测结果,判断监测区域的扬尘扩散情况,为室外健康活动区域的选择提供可靠依据。
猜你喜欢
河南科技(2023年1期)2023-02-11
Chinese Physics B(2022年5期)2022-05-16
广东石油化工学院学报(2022年1期)2022-03-25
环境保护与循环经济(2021年7期)2021-11-02
黑龙江交通科技(2020年5期)2020-01-13
建筑热能通风空调(2018年5期)2018-07-09
汽车与安全(2016年5期)2016-12-01
汽车与安全(2016年5期)2016-12-01
中国环境监察(2016年11期)2016-10-24
浙江大学学报(工学版)(2015年1期)2015-03-01
