
多端口空间永磁同步电机磁路模型及电磁特性
2022-12-04 11:26刘欣郑晓林
电机与控制学报 2022年11期
刘欣, 郑晓林
(天津工业大学 天津市现代机电装备技术重点实验室,天津 300387)
0 引 言
永磁同步电动机以其高效率、高功率密度以及高可靠性等优点,在新能源汽车、航空航天等领域应用广泛[1-2]。但是传统永磁同步电机输出端口单一,散热差,转子铁心利用率低,且通常需要机械变速箱来匹配高速电机与相对低速的负载[3-4]。对此提出一种多端口空间永磁同步电机,该电机不仅继承了永磁同步电机的诸多优点,结合了盘式电机与永磁行星齿轮传动的优点,并且能够提高定子绕组的散热能力;同时,多端口空间永磁同步电机综合了减速器和盘式电机的特性,能够实现直接驱动和低速大转矩的动力输出,可以应用在新能源汽车等领域。且该电机可以实现多自由度的动力输出,在航空航天以及医学工程的多自由度运动的高集成机器人手腕关节有应用前景。
由于多端口空间永磁同步电机结构新颖,且国内外对这种空间电机尚处在理论分析和样机试验阶段,与此相关的文献还比较少。多端口空间永磁同步电机的结构复杂,且其特殊的空间结构使得在分析该电机的电磁特性时难度较大,目前被广泛应用于分析空间电机磁场分布情况的有限元方法虽然计算精确,但是会消耗大量时间和计算资源,不利于电机的初期设计[5-6]。也有学者通过求解麦克斯韦方程组进行磁场分析计算,但是磁路饱和、定子齿槽和漏磁等因素的过度简化可能导致计算精确度偏低[7]。标量磁位法也可用来处理电流区域的方法能有效缩短三维有限元软件的计算时长,但是三维的分析方法仍要耗费较多时间[8]。等效磁路法是一种对电机磁场的近似求解方法,采用场化路的方法,将实际不均匀分布的磁场转化为沿不同截面均匀分布的磁路,将每段磁路用规则路径等效替代,可以减小计算量,缩短设计周期[9]。
等效磁路法通过对电机磁路结构进行模拟,能够迅速得到电机磁场分布以及磁场参数,在达到工程要求的前提下,计算速度也得到很大提升,非常适用于电机的初期设计,该方法对电机电磁特性分析及后期结构参数的设计和优化有重要意义[10-12]。等效磁路模型是等效磁路法的核心,建立正确的等效磁路模型至关重要。文献[13]建立了混合转子永磁同步电机的等效磁路模型,提出了一种考虑永磁体端部漏磁的新型截面建模方法,并将主磁路和漏磁路进行了分离,通过有限元分析验证了等效磁路模型的正确性。文献[14]提出了新型基于网状的等效磁路模型,给出了一种通用的气隙模型解决方案,进行了空载反电动势和气隙磁密等的解析计算,验证了通用气隙模型的正确性。
本文基于多端口空间永磁同步电机的结构特征,分析其工作原理及驱动特色,针对该新型空间电机内部复杂的三维空间磁场分布,运用积分思想对其空间磁场微元进行分析。进一步对该电机静态磁路和电周期内磁路进行分析,利用基尔霍夫第一定律建立等效磁路模型,对多端口电机的电磁特性进行求解。通过分析该电机静态磁路模型对气隙磁密进行求解,由该电机在一个电周期内的等效磁路模型对空载磁链和空载反电动势以及齿槽转矩进行求解。现有文献对端部效应的研究主要集中在永磁同步直线电机上。永磁同步直线电机工作时,由于两端端面的存在,气隙磁场发生畸变,产生端部力[15]。对于多端口空间永磁同步电机而言,在行星轮转子旋转的过程中,其上永磁齿产生的磁场和盘式定子铁心之间会发生磁耦合。永磁齿在进出盘式定子包角时,由于盘式定子铁心的磁导率与空气磁导率相差较大,会引起端部效应。为了分析多端口空间永磁同步电机端部效应引起的磁路变化,将多端口空间永磁同步电机与无端部永磁同步电机进行对比分析,讨论端部效应对多端口电机磁路结构和电磁特性的影响。通过有限元仿真,对比分析等效磁路模型解析结果与有限元仿真结果。
1 结构和工作原理
多端口空间永磁同步电机主要由盘式定子、行星轮转子和盘式转子组成,其结构如图1所示。其中盘式定子是由环形硅钢片叠压而成,沿盘式定子径向均匀开有半圆形通孔用于放置各行星轮转子,且通孔表面有定子槽以嵌放电枢绕组,电枢绕组通电产生旋转磁场;行星轮转子通过转子轴固定在底座支撑架上,行星轮圆周上贴有NS极相间的永磁齿,行星轮轴均与盘式转子输出轴垂直,行星轮转子在盘式定子绕组旋转磁场的作用下输出动力,盘式转子在行星轮转子电磁驱动力作用下实现了运动和动力的输出;盘式转子的输出转速与行星轮转子的输出转速符合齿轮传动的减速关系,两者运动关系存在一定的减速比,即为盘式转子磁齿与行星轮转子磁齿的齿数比。可见,多端口空间永磁同步电机综合了减速器和盘式电机的特性,能够实现直接驱动和低速大转矩的动力输出。

图1 多端口空间永磁同步电机结构
由图可以看出,虽然多端口空间永磁同步电机盘式定子、行星轮转子和盘式转子所形成的磁场为三维空间磁场,但三者之间满足一定的电磁啮合关系,磁路具有一定的规律性。在对多端口电机进行结构分析的基础上,将内部三维空间磁场简化为二维磁场,并假设每段磁路磁通沿截面均匀分布。该方法便于建立该电机磁通模型及等效磁路模型,同时也对多端口电机参数设计和电磁特性分析具有重要意义。
2 等效磁路模型的建立与计算
2.1 磁路分析
多端口空间永磁同步电机的上部主磁通从行星轮转子N极出发,穿过上气隙,通过盘式转子S极,流经盘式转子轭部,穿过盘式转子N极、上气隙和行星轮转子S极与转子轭部形成闭环。其下部主磁通从行星轮转子N极出发,穿过下气隙,通过盘式定子轭部、侧气隙、转子S极和转子轭部形成闭环。各磁路沿盘式转子周向形成回路,而磁路在空间上沿盘式转子径向分布,且盘式转子齿距沿径向变化,而行星轮转子磁齿的齿距沿轴向不变,导致盘式转子与行星轮转子间的磁路沿盘式转子径向不断变化,该电机内部三维磁路具有空间特性。对多端口空间永磁同步电机中单个行星轮转子进行分析,其空间磁力线如图2所示,为便于分析计算,将其电机模型沿盘式转子周向展开到y-z平面,将三维磁路简化为二维磁路进行分析和计算。

图2 行星轮转子磁力线
为了对多端口空间永磁同步电机静态磁路进行分析,根据该电机结构的对称性,只需对盘式转子相邻两个磁齿和行星轮转子相邻两个磁齿所形成的闭合磁路所在三维空间进行分析,将每条形状不规则的闭合磁路用形状规则的四边形等效替代,其闭合磁路在空间上沿盘式转子径向围成三维实体为有界闭区域,应用积分的思想,对该有界闭区域进行划分为若干子区域,每个子区域微元可等效为沿盘式转子径向任意磁路截面,而子区域的周长即为磁路长度。如图3所示,根据径向比例关系可得任意截面处闭合磁路长度与最外表面闭合磁路长度的关系。

图3 盘式转子和行星轮转子磁路划分
由图可以看出,有界闭区域Ω即为两转子相邻两永磁齿形成的闭合磁路三维空间,任意子区域微元截面的周长可近似代表该截面的磁路长度。可得任意截面的磁路长度表达式为:
(1)
式中:r1为盘式转子半径;r2为行星轮转子半径;h1为盘式转子磁齿高;h2为行星轮转子的磁齿高度;δ1为盘式转子磁齿与行星轮磁齿间气隙长度;α为盘式转子相邻两永磁齿所夹角度;g0为最外表面磁路沿z轴方向等效磁路段长度;ga为任意截面端磁路等效圆弧磁路长度;gb为任意截面磁路沿z轴方向等效磁路长度;gc为任意截面下端磁路等效圆弧磁路段长度;Δx为任意截面到盘式转子轴线的距离;L为任意截面磁路等效总长度。
2.2 静态和电周期磁通模型
为了分析多端口空间永磁同步电机的电磁特性,本文将分别研究该电机静态盘式转子、行星轮转子和盘式定子间磁通以及电周期内行星轮转子和盘式定子间磁通。多端口空间永磁同步电机磁路分为两部分,包括该电机盘式转子磁齿和行星轮转子磁齿形成的磁路以及行星轮转子和盘式定子形成的磁路。为了提高等效磁路法的计算精确度,本文分别考虑了盘式转子磁齿端部漏磁、盘式转子磁齿与行星轮转子磁齿漏磁和行星轮转子磁齿与盘式定子漏磁,因为盘式转子磁齿端部漏磁相比盘式转子磁齿与行星轮转子磁齿漏磁和行星轮转子磁齿与盘式定子漏磁少很多,所以盘式转子磁齿的端部漏磁可以忽略不计。该电机静态磁通如图4所示。

图4 多端口空间永磁同步电机静态磁通

通过该电机静态磁通示意图可以看出,盘式转子磁路对于行星轮转子和盘式定子间磁路影响不大。因此在分析该电机行星轮转子外气隙的气隙磁密时需要考虑盘式转子,而在分析磁链、空载反电动势以及齿槽转矩时,只需建立行星轮转子与盘式定子的等效磁路模型即可求解。
为了分析多端口空间永磁同步电机行星轮转子和盘式定子在不同相对位置时磁力线分布情况,本文以多端口电机的一个电周期为例,每T/10位置选取磁通路径截面图进行分析,得到该电机在半个电周期内行星轮转子和盘式定子间磁通如图5所示。因为多端口空间永磁同步电机在一个电周期内的磁力线路径和分布关于T/2时刻位置奇对称,根据对称性可得到整个电周期的磁通变化情况。本文以A相绕组为例,对与该电机A相绕组相匝链的变化的磁通路径进行分析,并对该相绕组空载磁链和空载反电势进行解析计算。
图5(a)展示了多端口空间永磁同步电机在起始时刻的磁力线路径,此时N极中心线与A相绕组槽中轴线的夹角为ε,行星轮转子和盘式定子形成的两组主磁通回路都匝链A相绕组,并且两组磁通量大小相等。图5(b)展示了该电机在T/10时刻的磁力线路径,此时N极中心线与A相绕组槽中轴线的夹角为ε,行星轮转子和盘式定子形成的少量漏磁通和部分主磁通匝链A相绕组。图5(c)展示了该电机在2T/10时刻的磁力线路径,此时N极中心线与A相绕组槽中轴线的夹角为3ε,行星轮转子与盘式定子形成的下侧和右侧磁通回路匝链A相绕组,其中右侧磁通回路的端部漏磁严重。图5(d)展示了该电机在3T/10时刻的磁力线路径,此时N极中心线与A相绕组槽中轴线的夹角为5ε,行星轮转子与盘式定子形成的右侧磁通回路匝链A相绕组,其中右侧磁通包含漏磁通回路。图5(e)展示了该电机在4T/10时刻的磁力线路径,此时S极中心线与A相绕组槽中轴线的夹角为3ε,行星轮转子与盘式定子形成的左右两部分对称磁通回路均匝链A相绕组,其中左右两侧主磁通回路由于定子端部结构影响,磁通回路受到挤压。图5(f)展示了该电机在5T/10时刻的磁力线路径,此时S极中心线与A相绕组槽中轴线的夹角为ε,与图5(a)间隔半个周期。ε的计算方法为
(2)
式中:T为多端口电机的周期;α为盘式定子包角。

图5 电机行星轮转子与盘式定子一个电周期磁通
2.3 磁导模型的建立
多端口空间永磁同步电机磁路结构复杂且随时间不断变化,对于等效磁导模型的建立是等效磁路模型搭建过程中的重点。本文采用磁通路径分段的方法,将铁心磁通和气隙磁通进行分段,建立每段磁通的等效磁导模型[12]。等效磁路各部分磁导如图6所示的6种模型,6种磁导可以表示为:
(3)
(4)
(5)
(6)
(7)
(8)

多端口空间永磁同步电机的静态磁通和一个电周期磁通可由上述磁导模型组合而成。磁导Gg2通过图6(a)磁导模型得到,Gmg2通过图6(b)磁导模型得到,G2和G3通过图6(c)磁导模型得到,Gm3和Gg1分别通过图6(d)和图6(e)磁导模型得到,Gg3和Gg4通过图6(f)磁导模型得到。

图6 6种磁路磁导模型
图4中该电机静态磁通中各磁导可分别由图6所示的6种磁导构成。由图5中该电机在一个电周期内磁通可以看出,该电机运动过程中行星轮转子和盘式定子间磁力线分布是不断变化的,使得磁导模型的位置和角度参数发生变化,对应各磁导可分别由图6(c)、图6(d)、图6(f) 3种典型磁导模型构成。
2.4 等效磁路模型
在得到多端口空间永磁同步电机盘式转子、行星轮转子和盘式定子磁路的等效磁导模型后,即可得到该电机在稳态和一个电周期内行星轮转子在不同位置时的等效磁路模型。该电机在静态时的等效磁路模型如图7所示。

图7 多端口空间永磁同步电机静态等效磁路模型
根据基尔霍夫磁路第二定律,可以建立多端口空间永磁同步电机在静态时等效磁路模型主磁路和漏磁路的磁动势方程:
Φo=(2F1+2F0)(G2+Gg1+G1+Gg2);
(9)
Φu=(2F1+2F2)(G3+Gg4+Gg3);
(10)
Φmo=(2F1+2F0)(G2+Gg1+G1+Gmg2+Gmg3);
(11)
Φmu=2F1(G3+Gmg5+Gmg4)。
(12)
多端口电机在一个电周期内的等效磁路模型如图8所示。根据多端口空间永磁同步电机在一个电周期内的等效磁路模型,可以建立磁动势方程,进而由磁路中的欧姆定律可以得到该电机在一个电周期内各位置匝链A相绕组的磁路磁动势表达式为:

图8 行星轮转子与盘式定子一个电周期内等效磁路模型

(13)
式中:Φ是磁动势方程中待求解磁通行向量;F是已知磁动势行向量;系数矩阵G是磁导矩阵。
磁动势方程矩阵形式可表示为
(14)
3 电磁特性有限元仿真分析
有限元仿真分析对研究多端口空间永磁同步电机有重要的意义,相比较等效磁路模型忽略了磁齿内磁导和盘式定子铁心材料磁导以及部分漏磁,在确定一组参数的情况下,该方法可以比较准确地得到该电机的气隙磁密分布,相绕组空载磁链和相绕组空载反电动势,对该电机的电磁特性分析和电磁参数设计有一定的参考价值。由Ansoft Maxwell对该空间电机进行二维静态和动态磁场仿真,该电机的主要仿真结构参数如表1所示。

表1 电机主要结构参数
由于多端口电机结构的对称性,只需分析单个行星轮转子与盘式转子、盘式定子的啮合区即可。为了分析多端口空间永磁同步电机的电磁特性和其盘式定子端部效应引起的磁路结构变化,在相同的极槽配合、转子内外径、定子内径、定子最小外径、气隙长度以及等永磁体用量的条件下,用有限元软件建立无端部永磁同步电机模型。其定子在保留了多端口空间永磁同步电机盘式定子结构参数的前提下,使盘式定子两侧端面不复存在,消除了盘式定子端部效应的影响。应用有限元仿真的分析方法,将多端口空间永磁同步电机与无端部永磁同步电机进行对比分析。
3.1 磁场仿真
为了验证磁路分析的合理性,对建立的多端口空间永磁同步电机和无端部永磁同步电机有限元模型进行求解,得到两电机的空载磁力线分布情况如图9所示。多端口电机行星轮转子和盘式定子形成的闭合磁路与无端部电机转子和定子的闭合磁路大致相同。从图中能够看出通过有限元仿真得到的磁力线分布图与分析得到的多端口空间永磁同步电机磁力线形状和走向基本一致。

图9 有限元模型的磁力线分布
3.2 气隙磁密分布
取多端口空间永磁同步电机行星轮转子外0.2 mm的气隙圆周路径和无端部永磁同步电机转子外0.2 mm的气隙圆周路径,通过静态磁场计算器得到气隙磁密仿真结果,选取行星轮转子与盘式定子啮合区域进行对比,如图10所示。

图10 气隙磁密结果对比
由图10可以看出,多端口空间永磁同步电机和无端部永磁同步电机的气隙磁通密度的最大值分别为1.09 T和0.93 T,多端口电机的气隙磁通密度幅值较无端部电机增加了17.2%。这是由于多端口空间永磁同步电机盘式定子的端部效应,盘式定子铁心的磁导率远大于空气,使得行星轮转子与盘式定子间的磁力线在铁心两侧端部内更加聚集,磁路的长度变短,磁导增大,气隙磁密就得到了提升,实现了聚磁的功能。结果表明,多端口电机行星轮转子和盘式定子间的聚磁效果好;在相同永磁体用量的情况下,可以有效地提高气隙磁通密度。图中多端口电机盘式转子与行星轮转子最近啮合处以及行星轮转子左右两磁齿靠近盘式定子端部处气隙磁密小于无端部电机相同位置处气隙磁密,这是由于多端口电机盘式转子与行星轮间的气隙变大,使得磁路数量以及磁导减小;多端口电机在盘式定子端部处气隙磁密大于无端部电机相同位置处气隙磁密,如图10中放大部分所示,这是由于多端口电机盘式转子与行星轮定子间少量漏磁路通过盘式定子端部。通过等效磁路法可以得出多端口电机盘式定子端部效应导致端部磁通的增量为该电机盘式转子与行星轮转子漏磁路以及行星轮与盘式定子主磁路两部分磁通量之和,即为式(10)和式(11)所得磁通之和。
多端口空间永磁同步电机等效磁路模型解析结果与有限元仿真结果对比如图11所示。由该电机静态等效磁路模型可得出气隙磁通,并进一步计算气隙磁密

图11 气隙磁密仿真和解析结果对比
(15)
式中:Φi为各气隙点处的磁通;Ai各气隙点所在等效磁通路径通过的永磁齿截面积。
由图可以看出,多端口空间永磁同步电机通过等效磁路模型解析计算结果和有限元仿真结果的分布规律基本吻合。行星轮转子端面气隙磁密相对于盘式转子轴线呈对称分布,其中行星轮与盘式定子的电磁啮合处气隙磁密较大,行星轮与盘式转子磁路的电磁啮合处气隙磁密较小。由于该电机盘式转子和行星轮转子间漏磁通路径在气隙中的部分较多,漏磁导相对较大,使得该部分漏磁通气隙磁密较小;而该电机行星轮转子和盘式定子间漏磁通路径在气隙中的部分较少,漏磁导也较小,使得该部分漏磁通气隙磁密较大。而该部分漏磁的产生是由于多端口电机的极弧系数参数选取稍大[16]。
3.3 绕组磁链
用等效磁路法和有限元仿真法求解多端口空间永磁同步电机磁链所用的时间如表2所示。由此可见,在保证合适精确度的前提下,等效磁路法的耗时更少,计算效率更高。

表2 EMN和FEA计算资源比较
磁链由磁通与绕组相交链而成,是衡量电机推力密度的重要参数。图12为有限元模型计算的多端口电机与无端部电机在一个电周期内磁链波形。

图12 空载三相绕组磁链对比
由图可以看出,多端口电机与无端部电机的空载三相绕组磁链呈正弦分布,多端口空间永磁同步电机磁链波形虽有波动但正弦性良好。多端口电机的A相和C相绕组磁链在数值上是相等的,B相绕组磁链在数值上大于其它两相绕组磁链,这是由于多端口电机半包式的绕组结构引起的,A相和C相绕组各有一个槽靠近半圆形定子端面,端部漏磁严重。多端口电机A相和C相绕组的空载磁链在一个电周期内小于无端部电机A相和C相绕组磁链,由于多端口电机定子的端部效应影响,且空气的磁导率远小于铁心的磁导率,使得匝链A相和C相的磁通数量远小于无端部电机,即气隙磁导减小。而多端口电机B相绕组空载磁链在峰值处略高于无端部电机,由于多端口电机端部效应使磁通路径受到阻碍而变形,使得匝链B相绕组的磁通磁导增大,实现了行星轮转子与盘式定子间聚磁的功能,符合该电机的结构特点。
由多端口空间永磁同步电机在一个电周期内的等效磁路模型,可得单相绕组的磁链为
ψ=NKw1Φ。
(16)
式中:N为每相绕组总匝数;Φ为主磁通;Kw1为基波绕组系数。
三相单层绕组节距因数Kp1为1,则基波分布系数为
(17)
式中:q为盘式定子槽数;p为多端口空间永磁同步电机极数;Z1为盘式定子铁心槽数。
多端口空间永磁同步电机等效磁路模型与有限元模型在一个电周期内的单相绕组磁链变化波形如图13所示。由图可以看出,等效磁路模型计算得到的磁链波形与有限元模型计算的结果基本吻合。相比于有限元仿真模型的磁链计算结果,多端口空间永磁同步电机等效磁路模型的磁链峰值误差为10.1%。由于磁路在电机端部会产生畸变,使得等效磁路模型计算结果在峰值附近相对于有限元模型产生偏差。
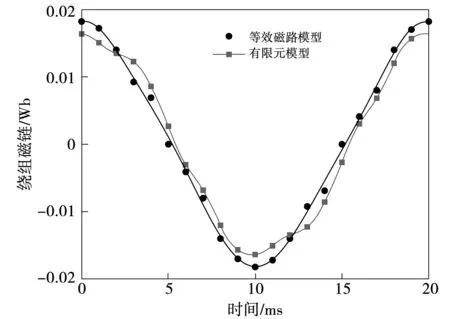
图13 空载磁链仿真和解析结果对比
3.4 空载反电动势
电枢绕组开路,得到多端口电机与无端部电机的相空载反电动势波形如图14所示。由图可以看出,多端口电机与无端部电机的空载三相绕组反电势波形呈正弦分布。其中多端口电机A相和C相绕组空载反电动势幅值与无端部电机三相绕组空载反电动势基本相同,而B相绕组空载反电动势幅值高于无端部电机,能够获得更大的转矩。

图14 空载三相绕组反电动势对比
由绕组的磁链特性,通过等效磁路模型可以得到多端口空间电机的空载反电动势波形。在得到近似正弦变化的磁链曲线后,将其对时间求导,并且忽略幅值较小的高次谐波[17],就可以得到相绕组空载反电动势为
(18)
多端口空间永磁同步电机等效磁路模型与有限元模型在一个电周期内的空载单相绕组反电势变化波形如图15所示。

图15 空载相反电动势仿真和解析结果对比
由图可以看出,等效磁路模型计算得到的相空载反电势波形与有限元模型计算的波形均呈正弦分布,且变化规律大致相同。多端口空间永磁同步电机等效磁路模型计算得到的空载反电动势波形峰值与有限元仿真模型计算结果误差为12.2%。空载反电动势波形误差较大的原因主要是由于求导计算对磁链的偏差有放大作用。有限元波形前半个周期在3 ms和8 ms处存在畸变,这是因为多端口空间永磁同步电机A相绕组匝链磁通在这两个时刻附近受端部效应影响较大。该电机在3 ms时刻A相绕组匝链磁通通过盘式定子端部进入空气,导致磁路结构改变和磁通量减少,磁导增大;而该电机在8 ms时刻由于盘式定子端部的聚磁效果,使得A相绕组匝链磁通量增加,该结果证明了等效磁路模型的有效性。
由于多端口空间永磁同步电机等效磁路模型计算得到的磁链和反电动势波形的峰值和正弦性与有限元仿真计算结果基本吻合,且气隙磁密的吻合度较高。在保证多端口空间永磁同步电机减速传动比、盘式转子和行星轮转子啮合传动正确性,实现两种不同动力源的功率和能量的合成与分配的前提下,能够得出该电机满足工程要求的电磁特性及规律性。
3.5 齿槽转矩
永磁同步电动机所特有的齿槽转矩会造成电机的振动和噪声,直接影响电机的性能,是多端口空间永磁同步电机设计中必须考虑的关键问题。利用侧向力法(lateral force method,LFM)求解齿槽转矩[18],假设盘式定子齿侧面上的切向磁通密度与径向磁通密度相同。所求齿槽转矩为作用于盘式定子齿侧边上的侧拉力,可以得到多端口电机的齿槽转矩为
(19)
式中:Bil,Bir分别表示第i个盘式定子齿左侧和右侧磁路的磁密;bil,ail分别表示第i个盘式定子齿左侧磁路边界到该齿的最远和最近距离;bir,air分别表示第i个盘式定子齿右侧磁路边界到该齿的最远和最近距离。
多端口空间永磁同步电机等效磁路模型与有限元模型计算得到的齿槽转矩波形如图16所示。从图可以看出,两种模型的结果基本吻合,验证了等效磁路模型的正确性。
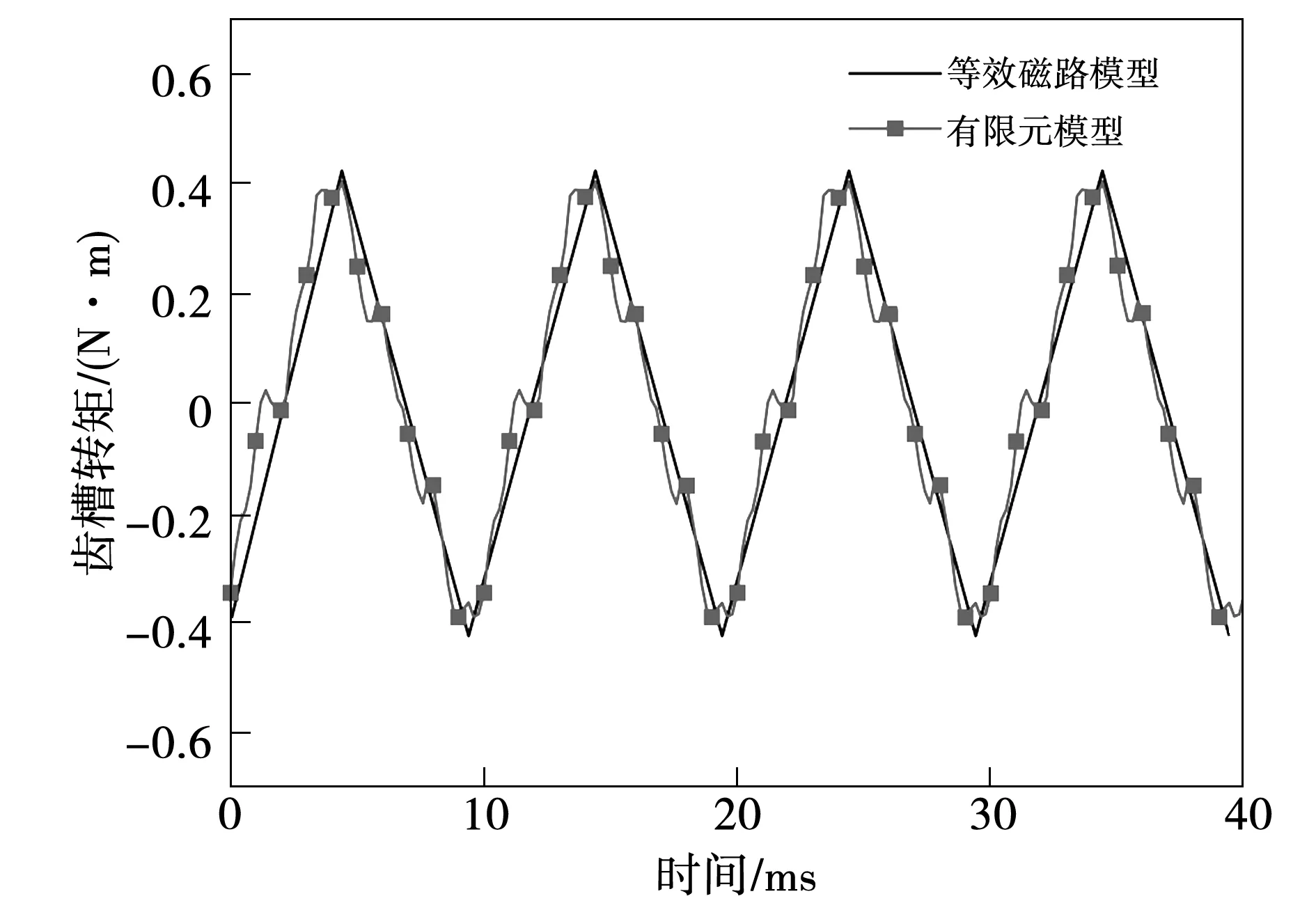
图16 齿槽转矩仿真和解析结果对比
4 结 论
本文提出了一种具有空间结构特点的新型多端口空间永磁同步电机,对其基本结构和工作原理进行了系统研究。应用积分思想将多端口空间永磁同步电机复杂的三维空间磁路转化为二维磁路,简化了磁路计算的过程。对该电机的静态磁通和一个电周期内变化的磁通进行了分析。
为了提高等效磁路法的计算精确度,考虑了漏磁路的影响。文中着重研究了磁阻模型的建立与计算方法,将铁心磁通和气隙磁通进行分段,并且建立了6种典型的磁导模型。分别建立该电机的静态和一个电周期内的等效磁路模型,并对其磁路的模型参数进行了分析和计算。
通过对比多端口空间永磁同步电机与无端部永磁同步电机的气隙磁密、三相绕组磁链曲线和相空载反电动势曲线,分析了由多端口空间永磁同步电机盘式定子端部效应引起磁路结构和电磁特性的不同。通过对比等效磁路模型和有限元模型的气隙磁密、相绕组磁链、空载反电动势和齿槽转矩计算结果,验证了等效磁路模型和磁场参数计算的有效性,为该新型空间电机的优化设计打下了坚实的理论基础。
猜你喜欢
恋爱婚姻家庭(2023年1期)2023-02-15
大电机技术(2022年5期)2022-11-17
大电机技术(2022年2期)2022-06-05
大电机技术(2022年2期)2022-06-05
航空发动机(2021年1期)2021-05-22
科技风(2019年6期)2019-10-21
弹箭与制导学报(2018年1期)2018-11-13
振动与冲击(2018年12期)2018-06-28
橡胶工业(2015年7期)2015-08-29
液压与气动(2015年12期)2015-04-16
