
基于动载识别的梁结构数字孪生风险防控技术研究
2022-12-03 07:42:10殷晓飞张梦雅张康龙
起重运输机械 2022年21期
陈 昆 殷晓飞 张梦雅 张康龙
1武汉理工大学交通与物流工程学院 武汉 430063 2湛江港(集团)有限公司 湛江 524000
0 引言
港口起重机械在服役过程中,设备状态数据的缺乏可能会导致安全事故的发生,造成巨大损失[1],因此需要对设备建立状态监测系统,实时监测结构状态,并针对危险情况进行预警,避免事故的发生[2]。
本文以起重机械中常见的梁结构为研究对象,提出一种基于动载识别的数字孪生风险防控技术,并针对实际工程应用中结构承受的动载荷不易求解的问题,推导一种基于Newmark法的动载求解方法。所述风险防控技术可以在有限个传感器的条件下,更加全面地实现梁结构的状态监测,能有效避免危险性事件的发生,而其中基于Newmark法的动载求解方法可以快速准确地求解作用于结构上的动载荷的大小及位置信息,研究有着重要的工程和理论意义。根据本文的研究内容,建立一套功能完备的配套系统,可准确且快速地反映结构的承载状态及承载状态下的响应,利用数字孪生技术在状态监测及预警方面的优势,提高结构的安全性,及时传递预警信息,并采取相应预案,避免事故发生,同时工作人员可通过该系统的可视化实时数据,直观地了解设备在运行过程中其结构的承载状态及响应情况。基于动载识别的数字孪生风险防控技术及其配套系统有利于结构风险防控领域的数字化和智能化的发展。
1 整体架构
基于动载识别的梁结构数字孪生风险防控技术的实现重点包括动载识别反问题中的力学映射以及描述梁结构实时状态的物理映射,动载识别反问题中的力学映射旨在提出动载识别方法,及时准确地求解结构承受的载荷向量,并成功反映至虚拟模型中;描述梁结构实时状态的物理映射指的是通过虚拟模型和物理模型之间的交互,实现梁结构的实时状态监测及预警,力学映射和物理映射共同实现基于动载识别的梁结构数字孪生风险防控技术。整体架构如图1所示,以梁结构为研究对象,通过求解结构动载识别反问题以及搭建数字孪生虚拟模型,实现结构的状态监测及预警。此架构由设备层、中间层与应用层3部分组成。设备层包含数字孪生系统中的物理模型及布置在上面的传感器,整体架构建立在设备层的基础上,基于设备层运转,继而通过状态监测及预警实现结构的风险防控。中间层主要用于动载识别与虚拟模型驱动,首先使用设备层传输的实时数据构造目标函数,提出基于Newmark法的动载求解方法,通过多次迭代计算得到设备层所承受的动载荷;其次使用动载数据驱动梁结构的有限元模型,仿真得到梁结构当前的特征参数响应,如应力、应变、位移等特征参数,最后将得出的部分参数与实时数据中未使用的对应参数进行比较分析,再次验证中间层建立的虚拟模型的准确性;应用层是将中间层获得的有效特征参数上传到云平台服务系统,对特征参数进行分析,从而实现结构的风险防控。当梁结构的响应特征参数超过设定的阈值时,云平台服务系统发出的预警信号将反馈到设备层,使设备做出相应动作,避免事故发生。
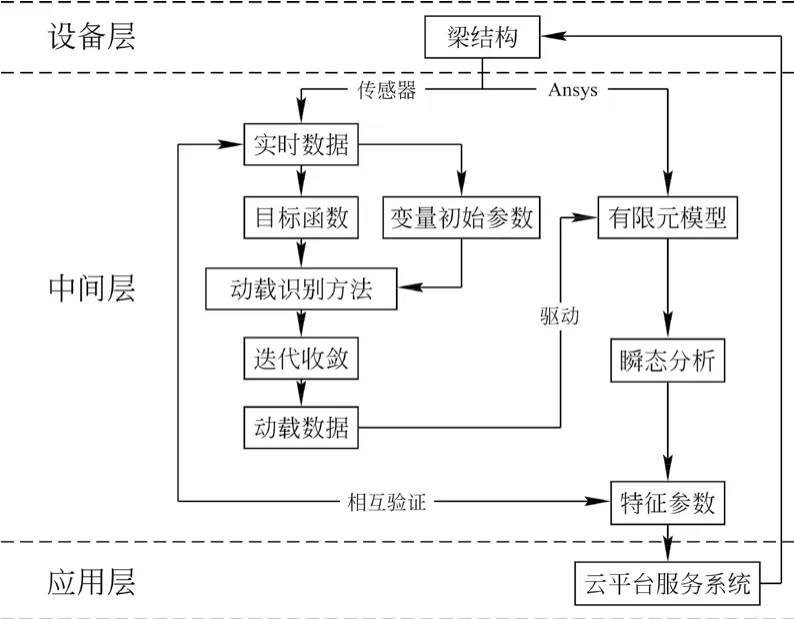
图1 整体架构
基于动载识别的梁结构数字孪生风险防控技术应包含:
1)建立基于Newmark法的动载求解方法,将传感器采集到的结构响应信息带入到动载识别方法中,以求解出结构所承受的动载荷,获取结构的承载状态;
2)动载识别方法要求运行速度快,求解结果准确;
3)建立对真实物理模型完整映射的数字孪生虚拟模型,映射包括物理模型的几何特征以及载荷与物理模型的作用关系;
4)所述基于动载识别的梁结构数字孪生风险防控技术可以实时、快速地实现结构的状态监测及预警,其配套系统具有良好的实时性、流畅性及准确性。
2 动载识别方法研究
2.1 基于Newmark法的动载求解方法
一般地,对于自由度为Nf的系统,考虑系统的阻尼作用,其运动方程可以表示为

式中:M为质量矩阵,C为阻尼矩阵,K为刚度矩阵,X为系统位移列向量,F(t)为系统动载荷列向量。
从数学层面来讲,式(1)是二阶常微分方程,可以用求解常微分方程组的标准方法来求解,但是在有限元动力学分析中,矩阵的阶数很高,用标准方法一般是不经济的[3],因此在有限元动力学分析中,一般采用其他有效的方法,本文基于Newmark法展开分析。
将系统运动方程按时间进行离散,时间增量为Δt,t时刻系统运动方程为

假设系统在t时刻和t+Δt时刻中间某一时刻的加速度值介于两时刻加速度值之间的某一常量,引入速度和位移的关系式为
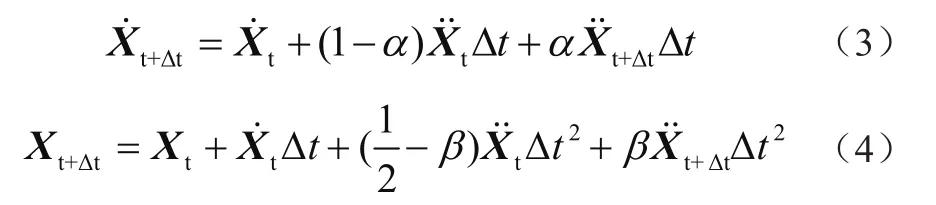
t+Δt时刻系统运动方程为

将式(3)、式(4)带入式(5)整理可得

式中:K(—)为有效刚度矩阵;F(—)为有效载荷向量。
通过有效刚度矩阵和有效载荷向量可求解出对应的位移列向量,现定义t时刻空间系统的广义载荷向量为
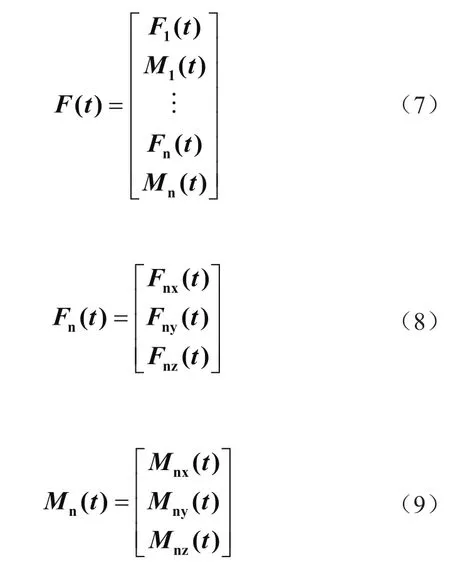
式中:n为系统节点编号,Fn(t)和Mn(t)分别为t时刻系统n号节点的力向量与弯矩向量,x、y、z表示载荷方向。
相应地,定义t时刻空间系统的广义位移向量
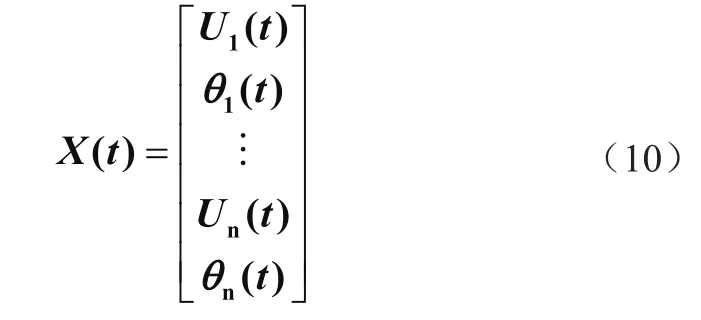
式中:Un(t)和θn(t)分别为t时刻系统n号节点的横向位移向量与转角向量。
求解多自由度空间系统的整体刚度矩阵K、阻尼矩阵C和质量矩阵M,可得到空间坐标系下的位移向量与有效载荷向量的关系为

本文关于求解载荷向量的反问题,即为已知测点处的位移向量,反求包含载荷大小及作用位置信息的载荷向量的问题。为研究这一问题,现根据测点位移计算值U(P,t)与测点位移测量值U(t)构造目标函数为

式中:P为载荷向量计算值。
目标函数以测点的位移计算值与测量值之间的均方误差为基础,为消除位移向量中元素数量所造成的影响,将均方误差以元素数量进行平均,此时目标函数即为平均损失函数,式(14)中的n为位移向量中元素的数量。这一处理使目标函数通过平均化获得与元素数量无关的统一指标。
实际工程中,系统的节点并不是全部在受力,为优化求解环境,提高求解速度,构造载荷定位向量δ和载荷数值向量p,对于载荷向量中的每一个位置信息都被保存至向量δ中,而节点的载荷数值信息被保存至向量p中,因此在求解过程中,载荷向量计算值P被分解为载荷定位向量δ与载荷数值向量p的对应项相乘,这样既提高载荷向量的求解精度,又提高载荷向量的求解效率。表示为

利用算法求解目标函数,使目标函数满足

即可得到系统的载荷向量时程数据。
式中:ε为迭代收敛值。
2.2 方法验证
如图2所示的简支梁模型,其质量密度沿轴向均匀分布,单位长度的质量m=0.706 5 kg/m,弹性模量E=2.1×1011Pa,泊松比μ=0.3,梁的长度L=0.4 m,截面宽度b=0.03 m,截面宽度h=0.003 m。现在梁上作用1个移动时变动载荷P(x,t),载荷以速度V(t)在梁上运动。模型在零时刻处于静止状态,且不计自重和阻尼的影响。

图2 移动时变动载作用下的简支梁
移动时变动载荷P(x,t)及速度V(t)为
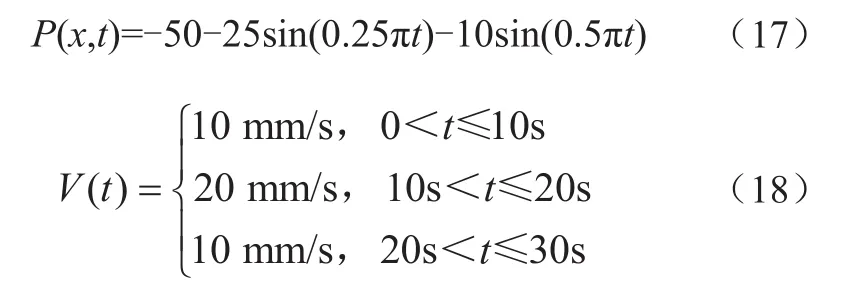
选取简支梁上L/2、L/10的2个位置作为测点,通过基于Newmark法的动载求解方法反求移动时变动载荷,计算结果如图3、图4所示,可以看出,反演载荷与真实载荷在载荷位置和载荷大小方面的拟合程度非常高,说明本文提出的基于Newmark法的动载求解方法可以准确地识别移动时变动载荷的位置和大小。

图3 载荷位置结果
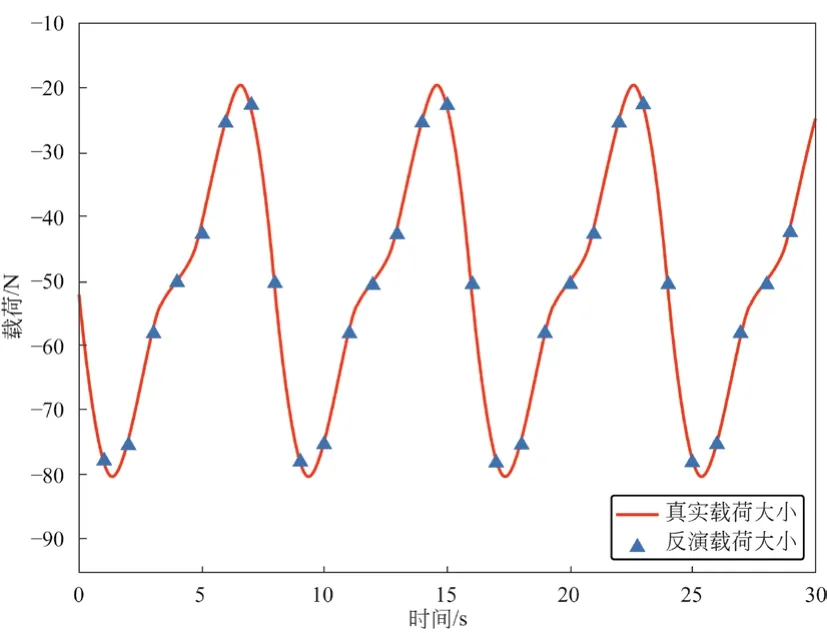
图4 载荷大小结果
3 系统搭建
3.1 总体设计
对于配套系统而言,本文采用B/S开发模式和MVC设计模式来实现系统的开发,来满足可靠性、先进性、可扩展性、可维护性和易用性等设计原则[4]。
通过B/S开发模式实现系统的开发,需要对服务器端与客户端的软件进行配置[5],将其进行统计整理,如表1所示。
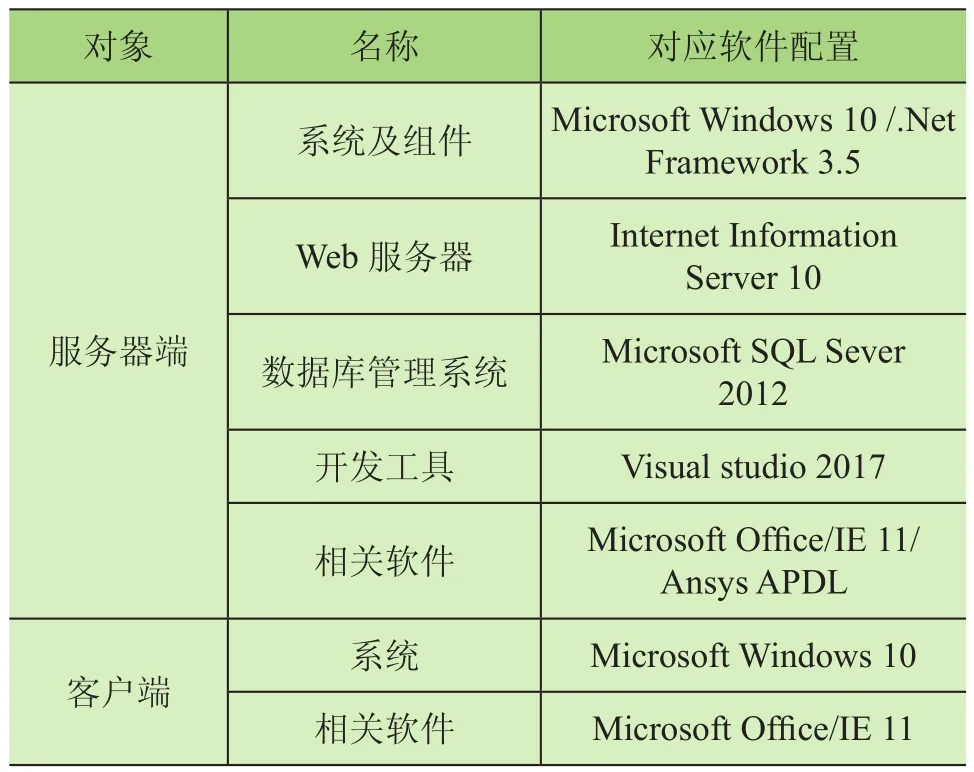
表1 系统软件配置
3.2 功能设计
通过分析基于动载识别的梁结构数字孪生风险防控技术的设计需求,可将功能划分为5大模块,如图5所示,分别为信息管理模块、反问题求解模块、状态监测模块、技术验证模块、安全预警模块。
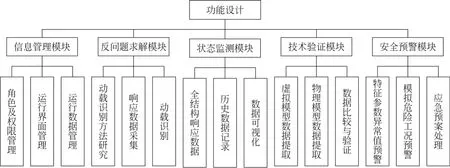
图5 功能模块体系
3.3 数据库设计
数据库的设计一般分为数据库选择、逻辑结构设计和数据结构设计3个主要步骤[6]。
1)数据库选择
SQL Server具有良好的使用性与集成性,且性价比高,适应性强,能满足多数企业的数据管理需求,故表现出很高的应用价值。SQL Server在使用过程中有着良好的交互性能,可以高效地处理各种数据源,如Excel、XML文档等,且在特定条件下,可以将其他数据源转换成SQL Server数据,故选择SQL Server对数据进行管理。
2)逻辑结构设计
数据库的逻辑结构设计普遍采用实体-关系模型(E-R模型)来完成,它是一种描述系统数据库建模方式的模型结构。本文系统的E-R图如图6所示。
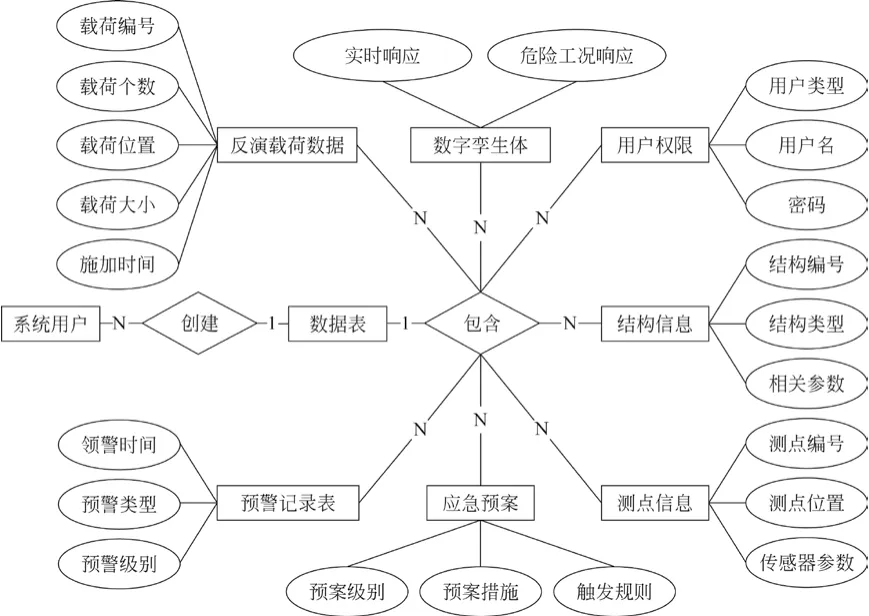
图6 系统E-R图
3)数据结构设计
根据系统E-R图,建立用户权限表、结构信息表、测点信息表、反演载荷信息表、数字孪生体信息表、预警记录表以及应急预案表,完成数据结构设计。在数据库结构设计阶段,应尽量降低系统内各个计算环节的耦合性,以便于系统后期的维护和扩展。
3.4 系统实现
搭建基于动载识别的梁结构数字孪生风险防控技术配套系统,并对具有代表性的功能进行展示。
1)用户登录
为了规范系统用户的范围与权限,首先需要对系统设置登录界面,以此来对不同角色的用户进行分类授权,通过角色信息来分配相应的使用权限。用户登录功能可以对用户的角色身份进行认证,从而保证系统的安全性,是系统必不可少的功能。
2)界面管理
用户登录完成之后,即可进入系统的主界面,系统主界面分为左边的功能区以及右边的的工作区,如图7所示。其中功能区包括系统的全部功能,工作区负责对功能区中的内容进行展示。在系统的主界面首页中可以结合实际需求对页面进行初始设置,预先展示相关功能。

图7 系统主界面
3)基础数据管理
基础数据管理包括系统管理以及梁结构管理2个功能,其中系统管理包括角色及权限管理、用户管理以及系统菜单管理3个子模块。角色及权限管理可以创建不同类型的角色,并给每个角色授予不同权限;用户管理用于管理系统使用者的基本信息、账号及密码等;系统菜单管理可以管理系统的功能区菜单栏,能够极大地扩展系统的功能性。梁结构管理包括类型管理、信息管理以及预警信息历史记录子模块,类型管理可以综合管理梁结构的编号以及种类信息,如各种截面的简支梁、悬臂梁等;信息管理针对系统中所有梁结构的详细技术参数、图纸等信息进行管理;预警信息历史记录主要用于存储以往的预警信息。部分功能展示如图8所示。

图8 预警信息历史记录
4)状态监测功能实现
利用动载识别结果可以建立梁结构承载状态下的数字孪生虚拟模型,通过分析虚拟模型的响应数据能间接地对梁结构进行状态监测。系统的状态监测功能是使用动态载荷作用下结构虚拟模型得到的应力、应变、位移等力学响应参数数据来反映梁结构的实时状态。状态监测功能包括实时数据展示、历史数据记录以及响应数据可视化。
实时数据展示是指将梁结构数字孪生虚拟模型的多个虚拟测点的各类响应数据接入云平台,通过对数据进行展示来实现梁结构状态的实时监测。现以本文所述简支梁为例,通过系统的实时数据展示子模块对其虚拟测点的应力及位移数据进行展示,如图9所示。历史数据记录是指对数字孪生虚拟模型的各类实时响应数据进行存储与管理,并提供查询功能,通过虚拟测点、创建时间、响应类型等信息可以获得所需要的历史数据。响应数据可视化用于展示虚拟测点各类响应数据的时程曲线以及结构的响应信息,可直观地观察各测点响应数据随时间的变化情况以及真实响应情况,其效果如图10所示。
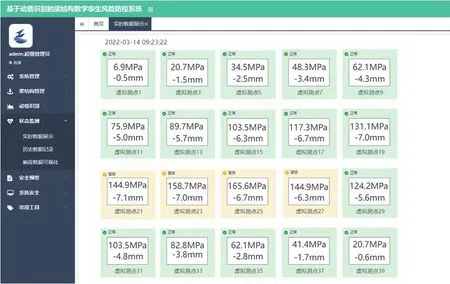
图9 实时数据展示

图10 响应数据可视化
5)安全预警功能实现
安全预警功能主要对实时承载工况以及模拟危险工况进行预警,预警机制为三级预警,然后针对不同级别的预警信息给出相应预案。安全预警功能包括预警阈值设置、实时承载工况预警、模拟危险工况预警以及应急预案4个子模块。预警阈值设置是针对不同的结构,根据实际需求对各类型响应设置自定义的预警阈值,只有对各结构设置了预警阈值,才可以结合设置值对结构的承载状态进行预警,预警阈值设置如图11所示。实时承载工况预警、模拟危险工况预警子模块分别对2种工况进行预警,显示当前响应数据对应的预警等级。应急预案子模块主要是针对不同的预警级别给出相应的预案。
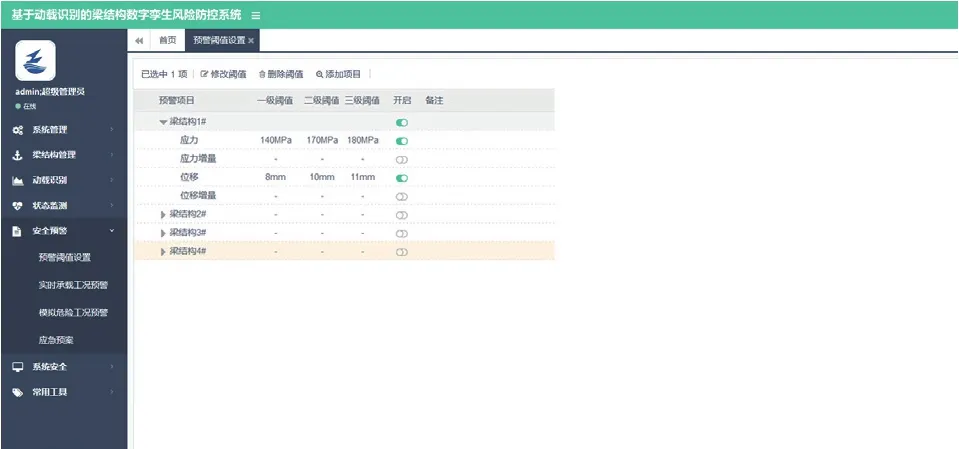
图11 预警阈值设置
4 结语
以梁结构为例,提出一种基于动载识别的数字孪生风险防控技术,并建立风险防控系统,通过对梁结构承受的动载荷进行识别,从而获得更加全面的结构承载情况与力学响应情况,并针对相应状态进行预警。系统可以实时地掌握结构的实际承载情况,能够降低动异常载荷作用在结构上可能存在的风险,有效避免事故的发生。
猜你喜欢
机械设计与制造(2023年2期)2023-02-27 12:40:16
新高考·高一数学(2022年3期)2022-04-28 07:02:46
汽车实用技术(2021年10期)2021-06-04 07:51:00
中学生数理化(高中版.高考数学)(2021年1期)2021-03-19 08:28:36
今日农业(2019年12期)2019-08-13 00:50:02
现代园艺(2017年22期)2018-01-19 05:07:01
高中生学习·高三版(2016年9期)2016-05-14 09:12:05
火控雷达技术(2016年3期)2016-02-06 02:30:27
新高考·高二数学(2015年11期)2015-12-23 18:17:44
水利水电科技进展(2014年1期)2014-10-17 02:29:14
