
基于改进滑模控制策略的开关磁阻电机直接瞬时转矩控制方法
2022-12-03 10:54:38韩国强吴孟霖于东升
电工技术学报 2022年22期
韩国强 陆 哲 吴孟霖 于东升
基于改进滑模控制策略的开关磁阻电机直接瞬时转矩控制方法
韩国强 陆 哲 吴孟霖 于东升
(中国矿业大学电气工程学院 徐州 221116)
基于传统滑模控制策略的开关磁阻电机直接瞬时转矩控制方法存在抖振大、动态时间长等问题,且利用机械方程获取参考转矩时需要实时观测系统负载。为解决以上问题,提出了一种基于改进滑模控制策略的直接瞬时转矩控制方法。在传统滑模面和滑模趋近律的基础上引入状态变量,降低了不同工况下电机的转矩波动和电机动态过程调整时间。为有效避免实时计算电机负载转矩,将负载转矩引起的系统变化映射到滑模面的变化,并在滑模控制器中引入负载转矩观测值自适应律,有效抑制了负载变化时的系统抖振并加快了系统动态响应。通过李雅普诺夫函数证明了改进滑模控制器的稳定性。为了验证所提方法的有效性,进行了仿真和实验,结果表明,该方法在稳态和变速变载工况下具有良好的性能。
开关磁阻电机 改进滑模控制 直接瞬时转矩控制 自适应律
0 引言
开关磁阻电机(Switched Reluctance Motor, SRM)因结构简单、容错能力强、控制方式多样等优点适用于对可靠性要求较高的场合[1-3],如电动汽车和煤矿机械等。但SRM的电磁特性受电流和定转子相对位置的影响,具有高度的非线性,难以建立其精确的数学模型。当系统受到内部参数变化或外部扰动影响时,传统的控制策略难以满足对系统高性能的控制要求,各种新型控制策略逐渐被应用到SRM中,如滑模控制策略、自适应控制技术[4]、自抗扰控制方法[5]等。滑模控制作为一种非线性控制算法,因其具有鲁棒性强、对参数不灵敏和响应快速等优点而被广泛应用[6-8]。
为了提升电机驱动系统的动态性能,降低电机的转矩脉动[9-10],基于滑模控制的电机控制方法可以分为两种:一种是将滑模控制器与模糊控制、神经网络、状态观测器等方法结合[11-13];另一种是通过改进滑模面和滑模控制率来提高系统的稳定性和趋近速率。文献[14]将神经网络和滑模控制相结合,设计了一种时变的滑模控制器,并应用到永磁直线同步电机控制中,通过调整不同工况下时变滑模面的斜率,有效缩短了运动点到达滑模面的时间,但训练神经网络需要先验数据,且时间较长。文献[15]提出了一种模糊滑模控制器,通过模糊控制动态选择滑模控制参数,维持了电机在不同工况下的动态性能。但将模糊控制、神经网络等控制方法与滑模控制相结合,会增加算法的复杂程度和在线实现难度。文献[16]设计了一种变参数趋近律法,通过改变远离滑模面和接近滑模面时的趋近律,提升了系统鲁棒性,同时减弱了系统抖振,但是该方法没有考虑负载扰动对系统动态性能的影响。文献[17]提出了一种基于指数趋近律的积分型滑模控制器,通过降低运动点到达滑模面时的速度,削弱了系统抖振,但是上述方法均需要实时利用负载转矩计算参考电流。文献[18]提出一种改进趋近律的非奇异终端滑模控制方法,通过改变符号函数提升了系统在滑模面的稳定性,并且削弱了抖振,但该方法降低了电机系统对外部扰动的反应速率。
在开关磁阻电机领域,文献[19]提出了一种基于模型跟随的滑模控制器,通过最小转矩脉动追踪算法抑制了转矩脉动,但是该方法滑模控制器参数固定,系统到达稳定的时间长。文献[20]提出了一种抗扰动滑模观测器和滑模速度控制器相结合的复合抗扰动速度控制策略,能有效观测负载转矩,并减弱系统抖振,但是结合两种滑模控制器的复合结构增加了控制算法的复杂程度。文献[21]介绍了一种具有集成开关面的滑模电流控制器,通过考虑磁路之间的相互耦合,提升了电机系统的动态响应性能,但是该方法采用传统的滑模控制率,电机到达稳定的时间长。文献[22]基于开关磁阻电机的电压方程提出了一种滑模电流控制器,可以实现开关磁阻电机的输出电流快速跟踪参考电流,但是该方法需要磁链和电压等数据,增加了控制算法的复杂程度。文献[23]提出了一种基于新型符号函数的趋近律,并将其应用到滑模控制器中,降低了收敛时间,但是该方法需要实时观测电机的负载转矩。
直接瞬时转矩控制(Direct Instantaneous Torque Control, DITC)策略具有动态响应快等优点,并能降低SRM输出转矩脉动。因此,为解决上述问题,本文提出一种基于改进滑模控制策略的开关磁阻电机直接瞬时转矩控制方法。通过改变传统滑模面和滑模趋近律的数学模型结构,降低了不同工况下电机的转矩波动和电机动态过程调整时间,并在电机动态过程中引入状态变量。通过引入负载转矩观测值自适应律,降低了负载变化对电机动态性能的影响。仿真和实验结果验证了所提方法的有效性。
1 基于滑模控制的开关磁阻电机控制策略
开关磁阻电机系统主要包括电机本体、电流检测装置、功率变换器和位置检测装置等,如图1所示。图中,A、B和C分别为A相绕组、B相绕组和C相绕组。VD1~VD6为续流二极管,S1~S6为功率三极管,a~c为三相绕组电流。开关磁阻电机运行遵循“磁阻最小原理”,各相绕组轮流导通。通过控制功率变换器实现各相绕组的换相导通。
SRM各相绕组存在三种工作状态,分别为励磁状态、续流状态和退磁状态,如图2所示。以A相为例进行说明,当功率三极管S1和S2导通时为励磁状态,如图2a所示;当功率三极管S1关断,S2导通时为续流状态,如图2b所示;当功率三极管S1和S2均关断时为退磁状态,如图2c所示。

图1 SRM系统组成
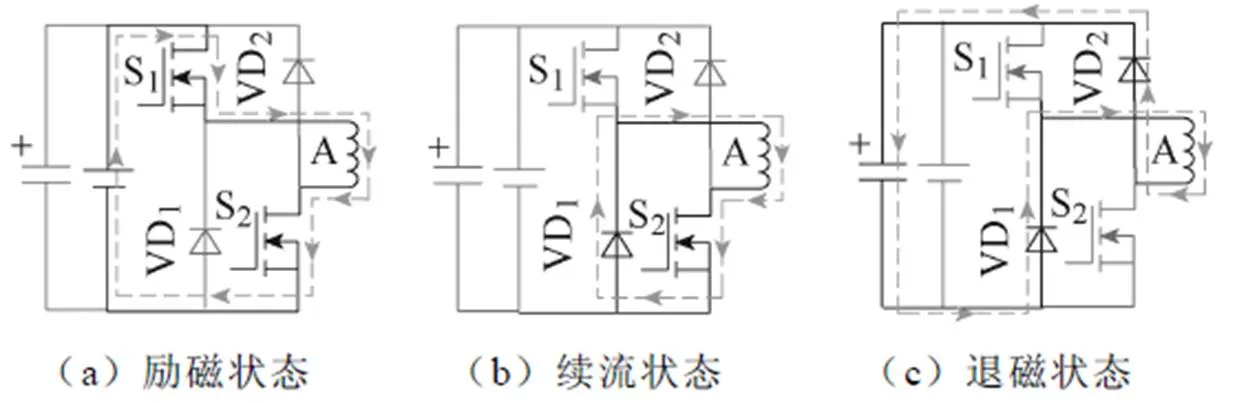
图2 SRM工作状态
开关磁阻电机各相绕组电磁转矩为
式中,i为第相绕组的相电流;L为第相绕组的相电感值;为电机转子位置角;T为第相绕组的电磁转矩。
SRM的机械运动方程为

式中,为电机机械角速度;为电机转子及负载的转动惯量;为粘性摩擦因数;e为电磁转矩;L为负载转矩。
SRM的总电磁转矩为

式中,abc分别为A、B、C三相绕组的电磁转矩。
图3为基于滑模控制器的SRM直接瞬时转矩控制框图。为保证电机实际转速快速跟踪给定转速,采用直接瞬时转矩双闭环控制策略,外环为转速环,利用滑模控制器根据实际转速和给定转速的差值得到参考转矩;内环为转矩环,根据给定转矩和实际转矩的关系,通过滞环控制器输出控制信号,确保实际转矩快速跟踪给定转矩。

图3 直接瞬时转矩控制框图
2 改进滑模控制器设计
2.1 传统滑模控制器设计及存在的问题
为方便计算,设定实际转速和给定转速的跟踪误差为

式中,ref为给定转速;为实际转速;为设定的跟踪误差。
取SRM控制系统的状态变量为
式中,1和2为系统的状态变量。
由式(5)可以看出,状态变量1和2的关系为

图4为滑模控制轨迹。可以看出,状态变量的运动轨迹主要包括两个阶段:趋近滑模面的运动阶段和在滑模面上的动态滑动阶段。滑模趋近律的选取影响到达滑模面的时间,即系统接近稳定的时间;而滑模面的选取影响状态变量在滑模面滑动的动态品质,即在滑模上抖振偏差的大小。为了提高系统性能,需要选取合适的滑模面和滑模趋近律。

图4 滑模控制轨迹
传统滑模控制器滑模面为

式中,为系数。
令式(7)中=0,并求导可得
解微分方程可得

由式(9)可以看出,系统进入滑模面后,电机的跟踪误差会以系数为的指数规律趋近于0,且与系统的扰动无关。选取过小会导致在滑模面的跟踪速率过慢,选取过大会导致系统失去稳定性。因此,要通过选择合适的系数确保系统在滑模面滑动的动态品质。
对式(7)微分,可得

将SRM的机械运动方程代入式(10),得

传统的指数趋近律为

式中,和为趋近律系数;sgn()为符号函数,具体表达式为

由式(12)可以看出,传统的指数趋近律由-和-sgn()组成。单纯的指数趋近,运动点趋近滑模面是一个渐近的过程,趋近速度从较大值逐渐降低到零;在指数趋近项的基础上增加一个等速趋近项,使得接近于零时,趋近速度不为零。
结合式(11)和式(12),得

由式(14)可得开关磁阻电机的参考转矩为

传统滑模控制器原理如图5所示。传统的滑模控制器存在参数不灵敏、响应速率快等优点,但由传统滑模控制器的设计步骤可以看出,仍存在以下问题:
图5 传统滑模控制器原理
Fig.5 Schematic diagram of traditional sliding mode control
(1)在滑模阶段,系统状态变量的滑动速率受传统滑模控制器中趋近律参数的影响,但该参数不会随工况和趋近情况而变化。
(2)系统的状态变量沿着滑模面向原点运动且最终收敛于原点或其附近一个很小的邻域内,工况的变化会引起系统运行状态变化,但指数规律由常数决定,传统滑模控制中的系数仅从较大值逐渐降低,会影响不同工况下的收敛速率。
(3)电机的负载转矩值需要实时观测,而在实际控制过程中负载转矩由于各种扰动是多变的,导致参考转矩难以准确获得。
2.2 改进滑模控制器设计
对电机机械运动方程微分,得

为了实现电机转速稳定,降低系统偏差引起的转速超调,需要保证系统在滑模面上的稳定性,但是传统的滑模控制器仅通过指数趋近律实现,不同转速不同负载下的趋近过程通过单一指数趋近律很难实现。为了提升电机的趋近速率,并保持稳定性,在传统滑模面的基础上增加系统状态变量以增加滑模面和滑模趋近律的时变性,并通过对转速跟踪误差进行微分来消除给定转矩表达式中的负载转矩变量。针对传统滑模控制的缺陷,设计了一种改进的滑模面,其表达式为


令式(17)等于零,可得
解微分方程,可得
通过式(20)可以看出,当系统状态到达滑模面时,随着状态变量|1|的增大,1+1/(|1|+)的值会下降,即系统在滑模面上的滑动速率逐渐降低。选取合适的值以保持开始进入滑模面的稳定性,并抑制系统状态变量在滑模面滑动时的抖振。
由于滑模趋近律影响到达滑模面的时间,为了保证状态变量快速到达滑模面,设计滑模趋近律为
式中,和分别为趋近律的补偿因子和分数阶次。
由式(21)可以看出,状态变量|1|的变化会影响趋近律的值,状态变量随时间降低,趋近律也随之降低,使系统状态在初始阶段的运动速率加快以降低响应时间,在滑模阶段降低运动速率以抑制抖振,实现整个运动阶段性能的最优化。考虑到的取值过大会过分放大|1|的影响,取值过小会降低|1|的作用,的取值范围设为(0, 10);而的取值要与接近滑模面时|1|的值相近,的取值要保证趋近滑模面时平滑,的取值范围设为(0.1, 1.0),的取值范围设为(0, 1)。
由于在趋近律中直接采用符号函数会导致在滑模面附近出现高频变化现象,本文将符号函数sgn()替换为||sgn(),其中0<<1以减少抖振,提高控制性能。当||>1时,系统接近滑模面的速度增加,||sgn()的控制效果更明显。
根据式(4)、式(16)和式(17)可得

在系统运行过程中,电机会受到不确定性负载扰动的影响。不确定性负载扰动会存在于电机运行过程中,且随着时间变化,所以负载转矩难以实时包含不确定性负载扰动。在电机运行过程中,扰动的变化会造成系统运行状态的变化,为了降低不确定性负载扰动对系统动态性能的影响,在式(22)中引入总负载转矩一阶导数观测值,通过将总负载转矩引起的系统状态变化映射到滑模面和滑模趋近律中,避免实时观测负载转矩。
联立式(21)和式(22),可得
由式(23)可以得到


根据式(24),可得
为了避免实时计算电机负载转矩,将负载转矩观测值自适应律引入参考转矩方程,将负载转矩的波动映射到滑模控制器滑模面的变化。设计的负载转矩观测值自适应律为
式中,为负载转矩观测值自适应律系数。
结合式(25)和式(26),可以得到输出参考转矩为


为了说明设计的滑模控制器具有稳定性,证明过程如下:选择Lyapunov函数为
对式(28)求导可得

联立式(21)和式(22),可得


为了判断式中各部分系数的正负,式(30)可等效为

其中
式中,和为两个系数。
通过分析式(32)可以看出,系数、均为正值。由式(13)可知,sgn()与同号,则与sgn()+同号,即-(sgn()+)<0,说明系统在有限时间到达滑模面,该滑模控制器稳定。
基于改进滑模控制器的原理如图6所示。与传统滑模控制策略相比,本文提出的改进滑模控制策略在滑模面引入系统状态量,在趋近阶段,运动点的运动速率较大,加快了系统的动态响应。在滑模阶段,运动点在滑模面上的运动速率降低,抑制了系统状态在滑模面上的抖振,减弱了系统在滑模面的偏差。同时,引入负载转矩观测值自适应律,将负载变化映射到转速抖振的变化,进而转化为滑模面和滑模趋近律的变化,降低转矩扰动对系统的干扰,同时不需要实时观测电机的负载转矩值。

图6 改进滑模控制器原理
3 仿真结果
根据图4所示原理,在Matlab/Simulink中搭建三相12/8结构SRM的DITC驱动系统。为了验证改进滑模控制策略的优势,在仿真模型中采用传统滑模控制策略和改进滑模控制策略对电机起动、变速、变载工况进行比较。三相12/8结构SRM开通角和关断角分别为0°和20°。负载转矩分别为0.5N·m和1.5N·m。其中,滑模控制器参数分别设定为=0.12,=0.2,=0.8,=5,=11,=0.03,=22。
为了比较传统滑模控制策略和改进滑模控制策略的性能,对SRM从起动到稳定转速时的过渡时间和转矩脉动进行分析。图7给出SRM在负载0.5N·m工况下从起动到稳定在600r/min时的转速和转矩脉动波形。从图7a可以看出,采用基于传统滑模控制策略的SRM驱动系统从起动到稳定在600r/min时的时间为0.23s,从图7b可以看出,基于改进滑模控制策略的对应时间为0.12s。与传统滑模控制相比较,改进滑模控制策略具有更好的动态性能。对比图7,采用传统滑模控制策略时的电机转矩的最小值为0.1N·m,转矩最大值为1.1N·m。而采用改进的滑模控制策略,最大转矩和最小转转矩分别为0.3N·m和1.1N·m,转矩脉动更小。
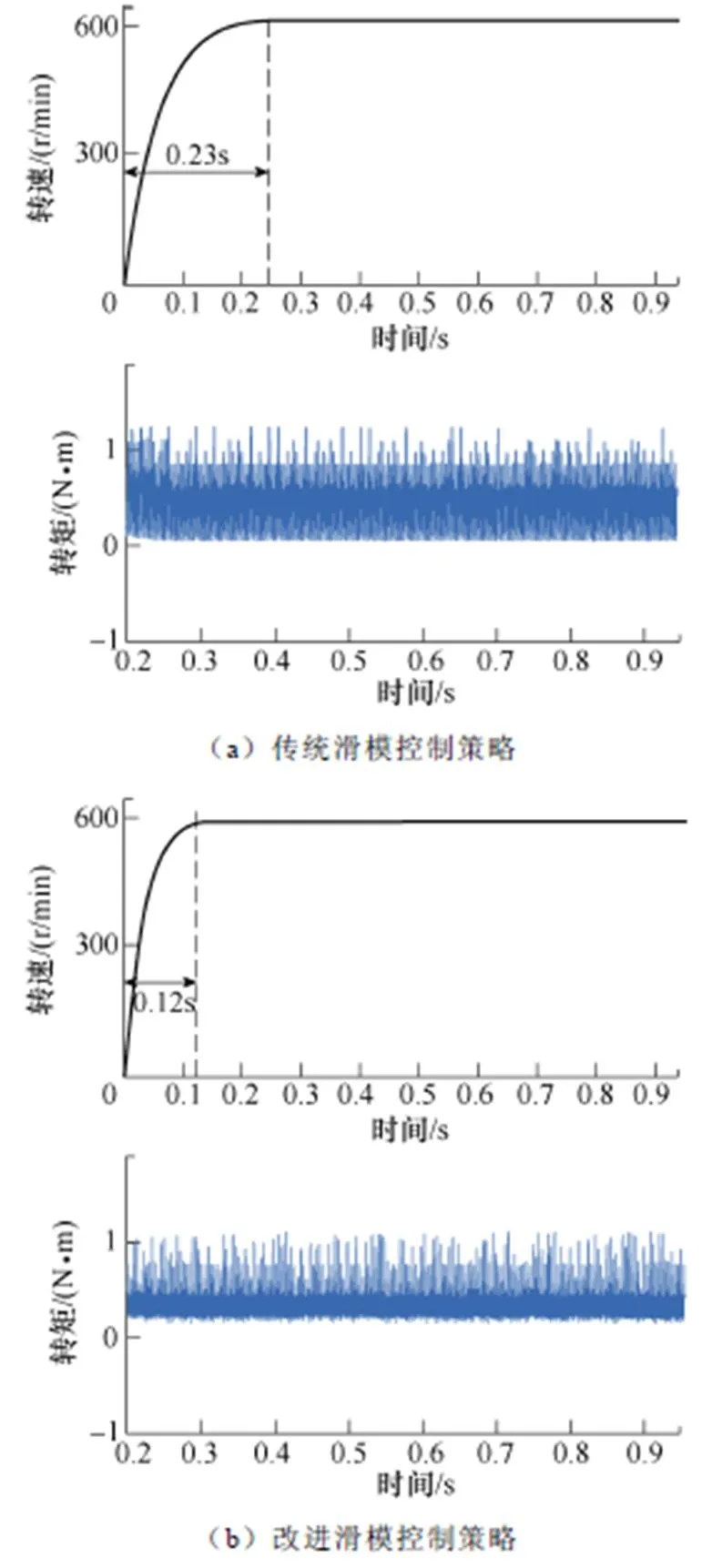
图7 0.5N·m、600r/min工况下转速和转矩波形
图8给出SRM在负载0.5N·m工况下从起动到稳定在1 000r/min时的转速和转矩脉动波形。对比图8a和图8b可以看出,采用传统滑模控制方法,电机从起动到稳定在1 000r/min时的时间为0.42s,转速到950r/min时所需时间为0.25s,占起动时间的60%;采用改进滑模控制策略时,电机从起动到稳定在1 000r/min时的时间为0.32s,而转速到950r/min时所需时间为0.18s,占起动时间的56%。可以看出,采用改进滑模控制策略在前期趋近给定转速时所需时间短,即趋近滑模面的时间短。在该工况下采用传统的滑模控制策略,电机转矩的最小值和最大值分别为0.1N·m和1.2N·m;采用改进滑模控制策略时,电机转矩的最小值和最大值分别为0.3N·m和1.1N·m。且采用传统滑模控制策略时转矩值密集分布在0.1~1.0N·m,而采用改进滑模控制策略时转矩值分布在0.3~0.7N·m,转矩脉动更小。可以看出,在变速工况下改进滑模控制策略具有更好的动态和稳态性能,验证了所提方法的有效性。
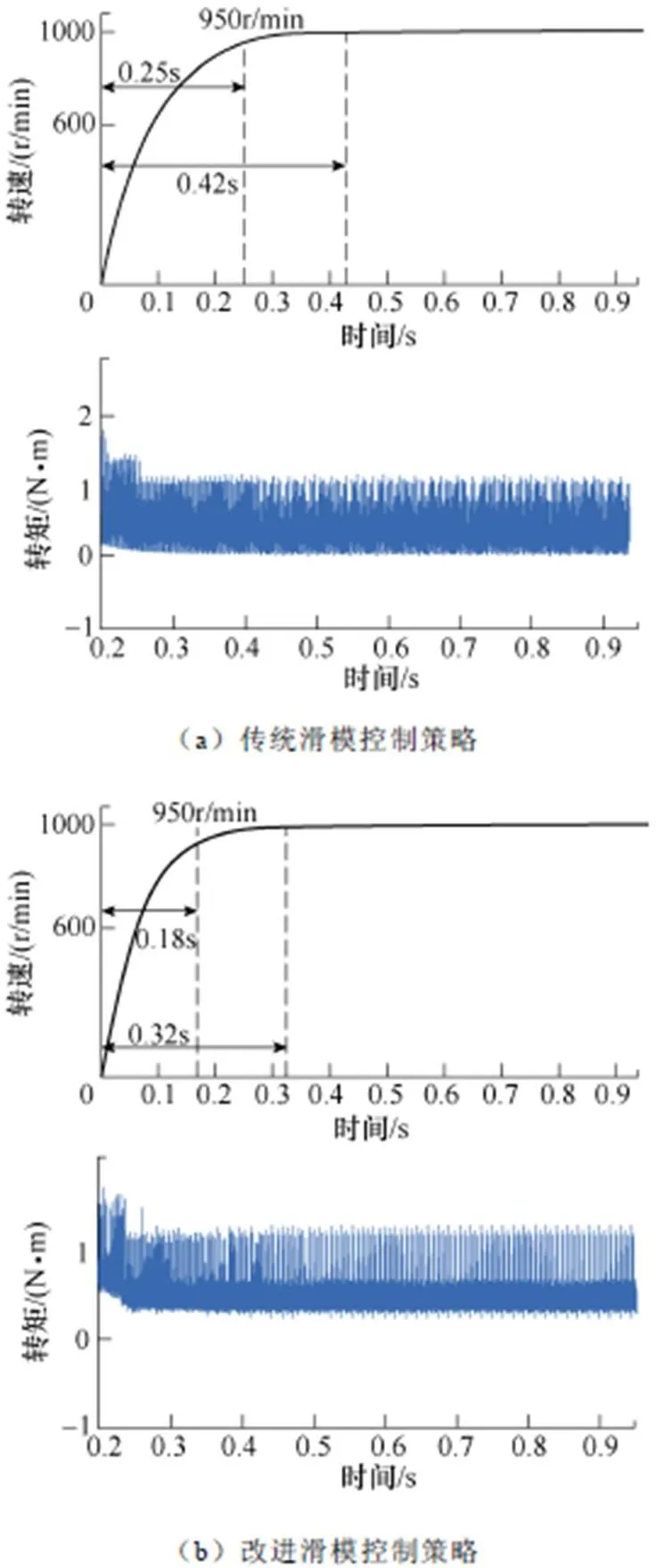
图8 0.5N·m、1 000r/min工况下转速和转矩波形
图9为给定转速突变情况下基于传统滑模控制策略和改进滑模控制策略的电机转速和转矩波形。给定转速在0.75s由600r/min突变为1 000r/min,负载转矩为0.5N·m。对比图9a和图9b可以看出,采用传统的滑模控制策略,电机的加速时间为0.25s,而采用改进的滑模控制策略后,电机的加速时间为0.15s。同时,采用改进的滑模控制策略后电机的转矩脉动减小,进一步验证了所提改进策略具有更好的动态性能。
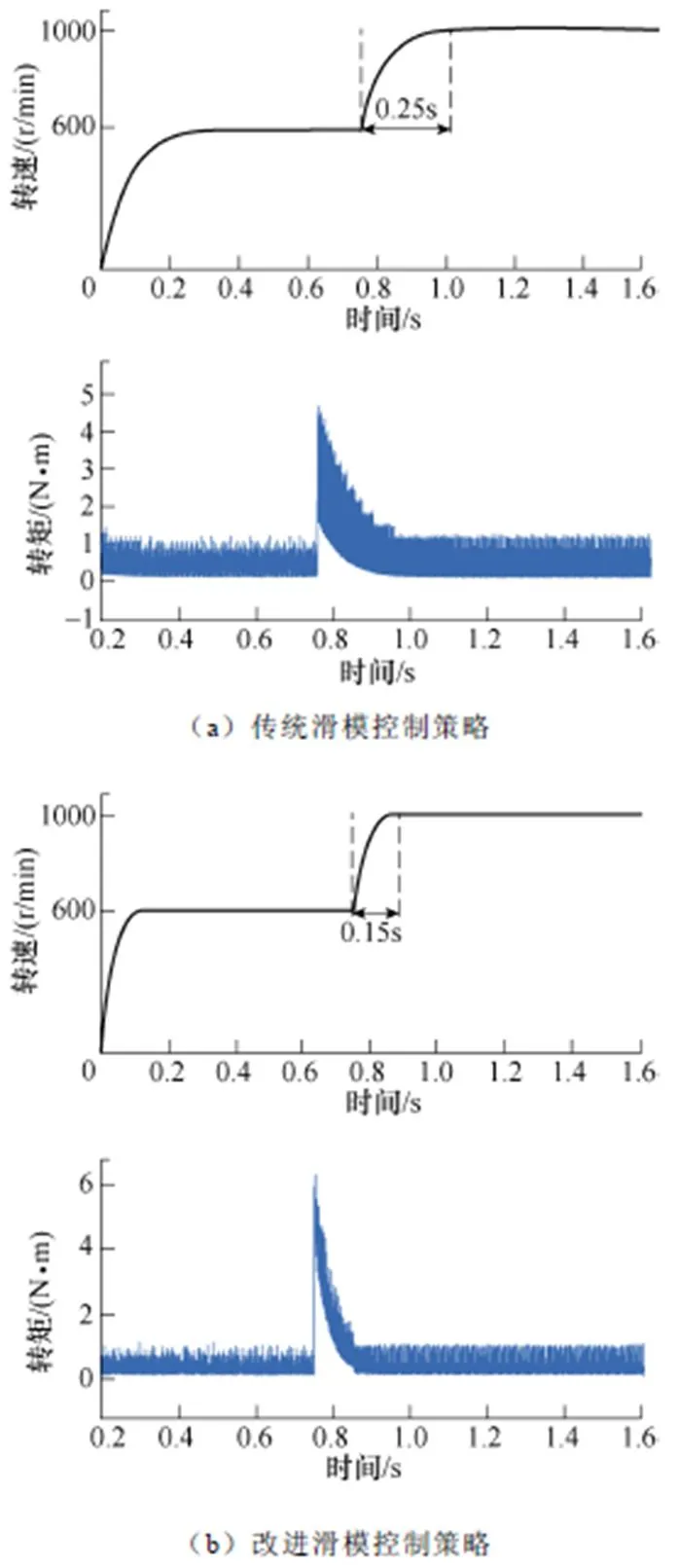
图9 0.5N·m突加转速工况下转速和转矩波形
图10为不同负载下基于传统滑模控制策略和改进滑模控制策略的电机起动过程转速和转矩波形。负载转矩为1.5N·m,电机给定转速分别为600r/min和1 000r/min。对比图10a和图10b可以看出,当给定转速为600r/min时,采用传统的滑模控制策略电机的起动时间为0.32s,采用改进的滑模控制策略电机的起动时间加快到0.19s,缩短了0.13s;当给定转速为1 000r/min时,采用改进的滑模控制策略电机的起动时间由传统滑模控制策略的0.69s加快到0.39s,缩短了0.30s,说明提出的策略具有更快的动态响应。图11为负载转矩为1.5N·m,电机给定转速为600r/min时的趋近律相平面图。图12为1.5N·m负载下电机加速波形。可以看出,改进的滑模控制策略加速时间比传统的滑模控制策略加速时间缩短0.09s。在加速过程中,改进的滑模控制策略转矩脉动值相较于传统策略降低,电机稳定运行后转矩脉动值从2.5N·m下降为1.5N·m,转矩脉动降低。
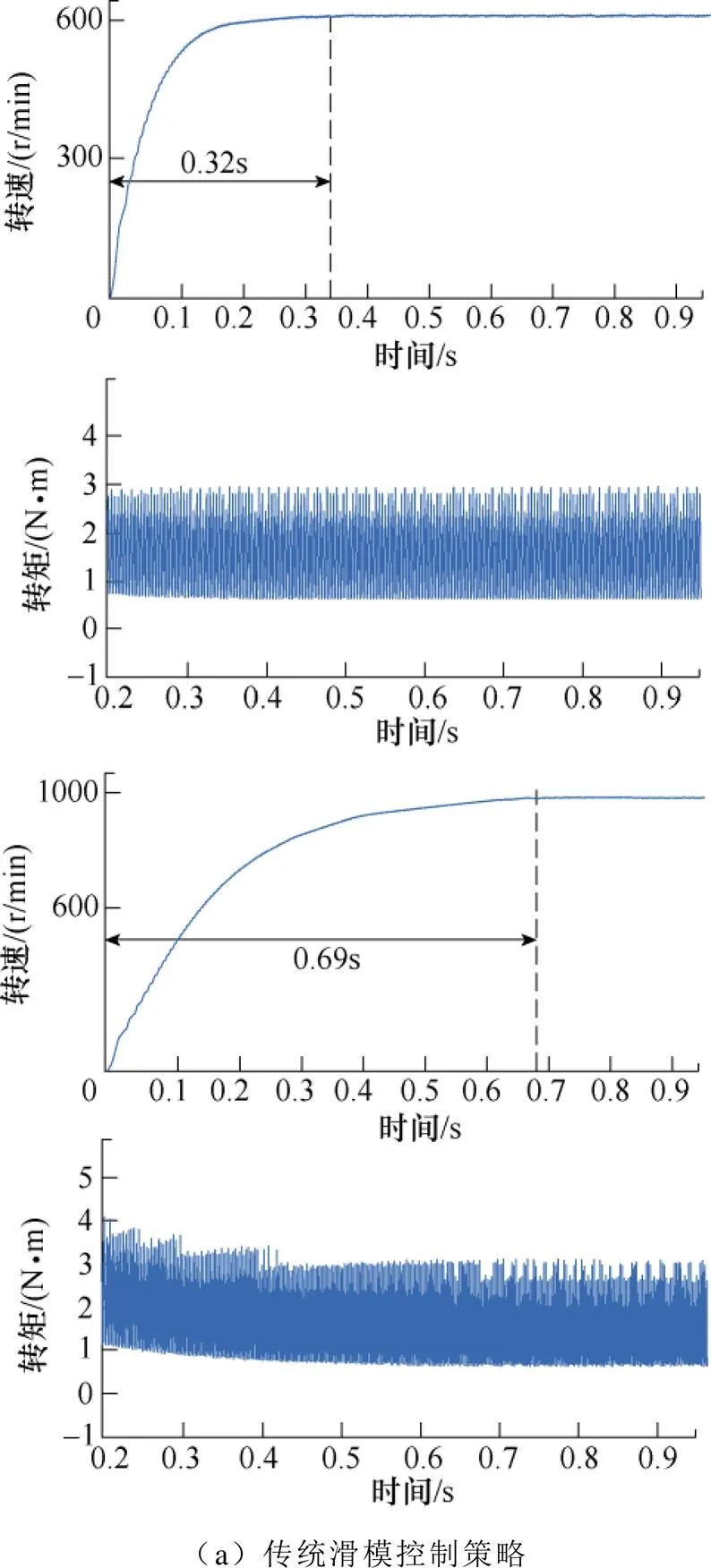

图11 改进滑模趋近律相平面图

图12 1.5N·m突加转速工况下转速和转矩波形
图13为电机负载突变工况下电机转速和转矩波形。电机转速为600r/min,加载时电机负载由0.5N·m变为1.5N·m,减载时电机负载由1.5N·m变为0.5N·m。对比图13a和图13b可以看出,电机在0.75s时突加负载,基于传统的滑模控制策略电机转速下降3r/min后回升,经过0.6s稳定,采用改进滑模控制策略电机的转速下降2r/min,经过0.01s再次稳定。对比图13c和图13d可以看出,电机在1.0s突减负载,采用传统的滑模控制策略在负载1.5N·m时转速波动较大,在减载后转速仍稳定在给定转速,转速波动降低;采用改进的滑模控制策略有效降低了负载对转速的影响,减载工况转速未发生明显变化。
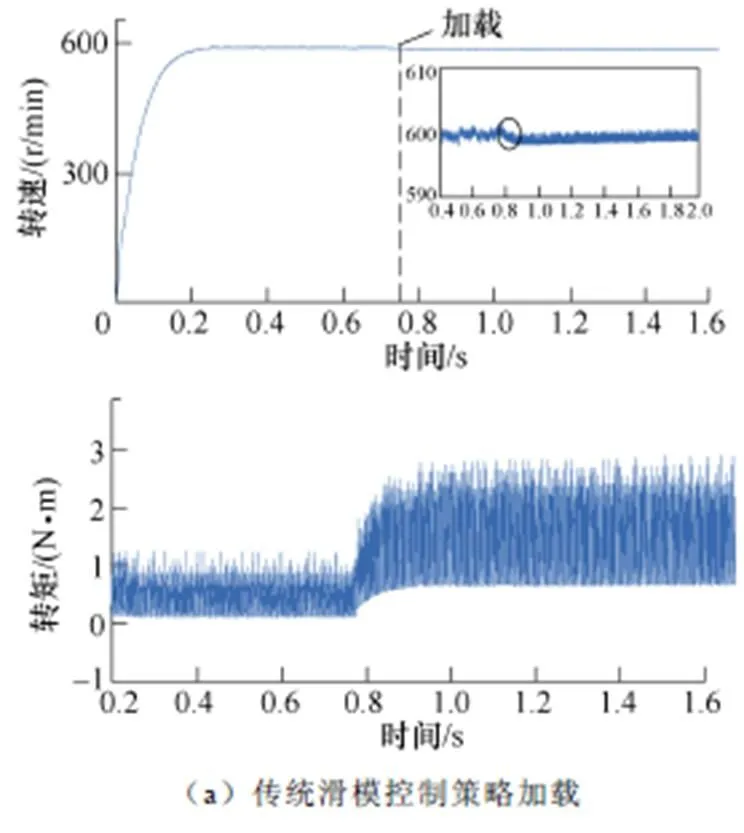
图14为电机转速为1 000r/min负载突变工况下电机转速和转矩波形。可以看出,在加载过程中采用传统的滑模控制方法电机转速下降8r/min,约0.1s恢复到给定转速;在减载过程中,采用传统的滑模控制方法电机转速上升10r/min,约0.18s恢复到给定转速。改进的滑模控制策略具有良好的鲁棒性。

4 实验结果
为了进一步验证提出的改进滑模控制方法的有效性,搭建了三相12/8结构SRM实验平台,如图15所示。控制器采用TI公司的TMS320F28335,采样芯片采用AD7606,DA芯片采用DA5344。电流传感器型号为LA-55P。功率变换器为不对称半桥型功率变换器。实验参数与仿真参数一致,负载转矩分别为0.5N·m和1.5N·m,开通角和关断角分别为0°和20°。所用开关磁阻电机的主要参数见表1。
图16为负载0.5N·m情况下电机起动过程转速和转矩波形。图16a和图16b中,给定转速分别为600r/min和1 000r/min。对比两图可以看出,当给定转速为600r/min时,采用传统的滑模控制策略和改进的滑模控制策略电机从起动到给定转速的时间分别为0.25s和0.18s,起动时间缩短,且相对于传统滑模控制策略转矩更加平稳,转矩脉动降低。当给定转速为1 000r/min时,采用传统的滑模控制策略和改进的滑模控制策略电机从起动到给定转速的时间分别为0.52s和0.45s,且采用传统的滑模控制策略转矩最大值和最小值分别为1.6N·m和0.2N·m。实验结果与仿真结果吻合,验证了该方法的有效性。

图15 开关磁阻电机实验平台

表1 所用SRM的主要参数

图17为负载1.5N·m情况下电机起动过程转速和转矩波形。图17a和图17b中,给定转速分别为600r/min和1 000r/min。当给定转速为600r/min时,采用传统的滑模控制策略和改进的滑模控制策略电机从起动到给定转速的时间分别为0.35s和0.30s,起动时间快0.05s,且转矩脉动低。当给定转速为1 000r/min时,采用传统的滑模控制策略和改进的滑模控制策略电机从起动到给定转速的时间分别为0.72s和0.60s,且采用改进的滑模控制策略转矩波动范围为1.0~2.6N·m,相比于传统的滑模控制策略更低。
为进一步验证提出方法的有效性,图18给出了电机在0.5N·m和1.5N·m负载情况下的电机加速波形。可以看出,两种控制策略下电机转速均可快速跟随给定转速。在负载0.5N·m工况,电机转速由600r/min提高到1 000r/min,传统和改进滑模控制策略所需的时间分别为0.31s和0.25s;在负载1.5N·m工况,电机转速在两种控制方式下由600r/min提高到1 000r/min所需的时间分别为0.40s和0.32s,过渡时间更短,且转矩脉动更低。电机转速分别为600r/min和1 000r/min情况下电机的变载波形如图19所示。对比可以看出,在不同转速情况下,电机负载发生突变时基于改进的滑模控制策略响应时间更快,转速变化更小,进一步验证了该方法具有良好的动态性能。

图17 负载1.5N·m电机起动波形
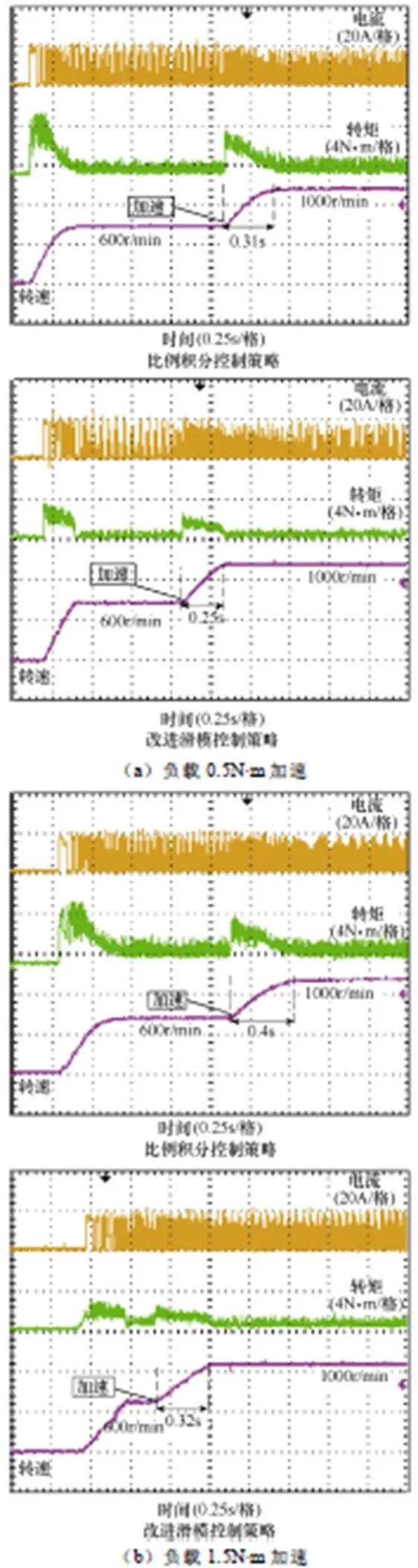
图18 不同负载电机加速波形
图20为负载1.5N·m电机起动波形。图20a和图20b中,给定转速分别为600r/min和1 000r/min。对比两图可以看出,当给定转速为600r/min时,采用比例积分控制策略和改进的滑模控制策略,电机从起动到给定转速的时间分别为0.60s和0.30s,起动时间缩短,且相对于比例积分控制策略转矩更加平稳,转矩脉动降低。当给定转速为1 000r/min时,采用比例积分控制策略和改进的滑模控制策略电机从起动到给定转速的时间分别为1.25s和0.60s。
表2给出了不同滑模控制方式下的对比结果。可以看出,所提方法具有良好的动态性能,且无需观测负载转矩。

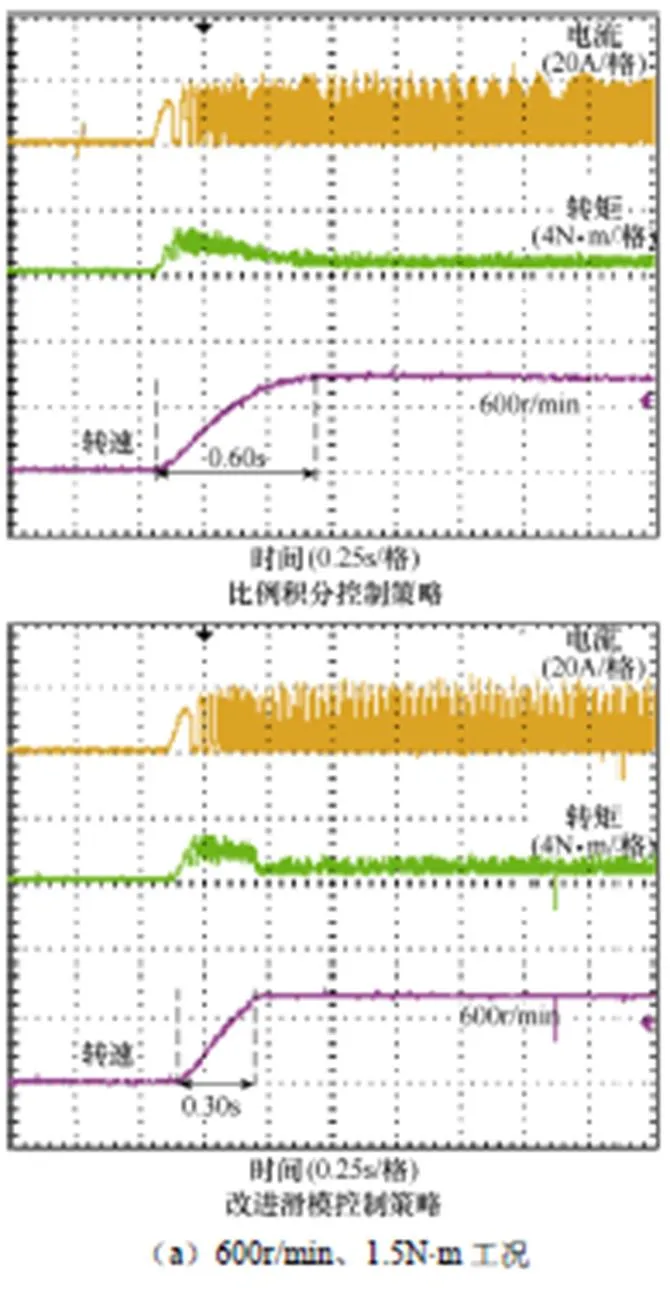

表2 滑模控制策略对比
5 结论
本文提出了一种基于改进滑模控制策略的直接瞬时转矩控制方法,有效解决了传统滑模控制策略中的抖振大和动态时间长等问题,且能避免实时观测负载转矩。通过改进传统滑模控制方法中的滑模面和滑模趋近律,提升了系统的响应时间和抗干扰能力。为了避免负载转矩对控制策略的影响,在传统滑模控制方法的基础上引入负载转矩观测值自适应律,将负载变化映射到滑模面的变化,有效抑制了负载变化时的系统抖振并加快了系统动态响应。基于改进滑模控制策略的SRM系统具有动态响应快和转矩波动小等特点,且方法易于在线实现。仿真和实验验证了所提方法的有效性。
[1] Sun Xiaodong, Feng Liyun, Diao Kaikai, et al. An improved direct instantaneous torque control based on adaptive terminal sliding mode for a segmented-rotor SRM[J]. IEEE Transactions on Industrial Electronics, 2021, 68(11): 10569-10579.
[2] Sun Wei, Li Qiang, Sun Le, et al. Study on magnetic shielding for performance improvement of axial-field dual-rotor segmented switched reluctance machine[J]. CES Transactions on Electrical Machines and Systems, 2021, 5(1): 50-61.
[3] 丁文, 李可, 付海刚. 一种12/10极模块化定子混合励磁开关磁阻电机分析[J]. 电工技术学报, 2022, 37(8): 1948-1958.
Ding Wen, Li Ke, Fu Haigang. Analysis of a 12/10- pole modular-stator hybrid-excited switched relu- ctance machine[J]. Transactions of China Elec- trotechnical Society, 2022, 37(8): 1948-1958.
[4] Pupadubsin R, Chayopitak N, Taylor D G, et al. A daptive integral sliding-mode position control of a coupled-phase linear variable reluctance motor for high-precision applications[J]. IEEE Transactions on Industry Applications, 2012, 48(4): 1353-1363.
[5] 董顶峰, 黄文新, 卜飞飞, 等. 圆筒型反向式横向磁通直线电机定位力补偿二阶自抗扰控制器位置控制[J]. 电工技术学报, 2021, 36(11): 2365-2373.
Dong Dingfeng, Huang Wenxin, Bu Feifei, et al. Second-order ADRC position control with detent force compensation for tubular reversal transverse flux linear machine[J]. Transactions of China Electrotechnical Society, 2021, 36(11): 2365-2373.
[6] 王喜莲, 许振亮. 基于PI参数自适应的开关磁阻电机调速控制研究[J]. 中国电机工程学报, 2015, 35(16): 4215-4223.
Wang Xilian, Xu Zhenliang. Speed regulation control of switched reluctance motors based on PI parameter self-adaptation[J]. Proceedings of the CSEE, 2015, 35(16): 4215-4223.
[7] 张康, 王丽梅. 基于反馈线性化的永磁直线同步电机自适应动态滑模控制[J]. 电工技术学报, 2021, 36(19): 4016-4024.
Zhang Kang, Wang Limei. Adaptive dynamic sliding mode control of permanent magnet linear syn- chronous motor based on feedback linearization[J]. Transactions of China Electrotechnical Society, 2021, 36(19): 4016-4024.
[8] 肖雄, 王浩丞, 武玉娟, 等. 基于双滑模估计的主从结构共轴双电机模型预测直接转矩控制无速度传感器控制策略[J]. 电工技术学报, 2021, 36(5): 1014-1026.
Xiao Xiong, Wang Haocheng, Wu Yujuan, et al. Coaxial dual motor with master-slave structure model-predictive direct torque control speed sensor- less control strategy based on double sliding mode estimation[J]. Transactions of China Electrotechnical Society, 2021, 36(5): 1014-1026.
[9] Diao Kaikai, Sun Xiaodong, Lei Gang, et al. Multiobjective system level optimization method for switched reluctance motor drive systems using finite- element model[J]. IEEE Transactions on Industrial Electronics, 2020, 67(12): 10055-10064.
[10] Wu Jiangling, Sun Xiaodong, Zhu Jianguo. Accurate torque modeling with PSO-based recursive robust LSSVR for a segmented-rotor switched reluctance motor[J]. CES Transactions on Electrical Machines and Systems, 2020, 4(2): 96-104.
[11] Ting Chensheng, Lieu J F, Liu Chunshan, et al. An adaptive FNN control design of PMLSM in stationary reference frame[J]. Journal of Control, Automation and Electrical Systems, 2016, 27(4): 391-405.
[12] Lian Bosen, Zhang Qingling, Li Jinna. Integrated sliding mode control and neural networks based packet disordering prediction for nonlinear networked control systems[J]. IEEE Transactions on Neural Net- works and Learning Systems, 2019, 30(8): 2324-2335.
[13] 武志涛, 李帅, 程万胜. 基于扩展滑模扰动观测器的永磁直线同步电机定结构滑模位置跟踪控制[J]. 电工技术学报, 2022, 37(10): 2503-2512.
Wu Zhitao, Li Shuai, Cheng Wansheng. Fixed structure sliding mode position tracking control for permanent magnet linear synchronous motor based on extended sliding mode disturbance observer[J]. Transactions of China Electrotechnical Society, 2022, 37(10): 2503-2512.
[14] 魏惠芳, 王丽梅. 永磁直线同步电机自适应模糊神经网络时变滑模控制[J]. 电工技术学报, 2022, 37(4): 861-869.
Wei Huifang, Wang Limei. Adaptive fuzzy neural network time-varying sliding mode control for permanent magnet linear synchronous motor[J]. Transactions of China Electrotechnical Society, 2022, 37(4): 861-869.
[15] 王天鹤, 赵希梅, 金鸿雁. 基于递归径向基神经网络的永磁直线同步电机智能二阶滑模控制[J]. 电工技术学报, 2021, 36(6): 1229-1237.
Wang Tianhe, Zhao Ximei, Jin Hongyan. Intelligent second-order sliding mode control based on recurrent radial basis function neural network for permanent magnet linear synchronous motor[J]. Transactions of China Electrotechnical Society, 2021, 36(6): 1229- 1237.
[16] 汪海波, 周波, 方斯琛. 永磁同步电机调速系统的滑模控制[J]. 电工技术学报, 2009, 24(9): 71-77.
Wang Haibo, Zhou Bo, Fang Sichen. A PMSM sliding mode control system based on exponential reaching law[J]. Transactions of China Electrotechnical Society, 2009, 24(9): 71-77.
[17] 夏长亮, 李莉, 谷鑫, 等. 双永磁电机系统转速同步控制[J]. 电工技术学报, 2017, 32(23): 1-8.
Xia Changliang, Li Li, Gu Xin, et al. Speed synchronization control of dual-PMSM system[J]. Transactions of China Electrotechnical Society, 2017, 32(23): 1-8.
[18] Sun Xiaodong, Feng Liyun, Zhu Zhen, et al. Optimal design of terminal sliding mode controller for direct torque control of SRMs[J]. IEEE Transactions on Transportation Electrification, 2022, 8(1): 1445-1453.
[19] de Paula M V, Barros T A D S. A sliding mode DITC cruise control for SRM with steepest descent minimum torque ripple point tracking[J]. IEEE Transactions on Industrial Electronics, 2022, 69(1): 151-159.
[20] Sun Xiaodong, Wu Jiangling, Lei Gang, et al. Torque ripple reduction of SRM drive using improved direct torque control with sliding mode controller and observer[J]. IEEE Transactions on Industrial Elec- tronics, 2021, 68(10): 9334-9345.
[21] Ye Jin, Malysz P, Emadi A. A fixed-switching- frequency integral sliding mode current controller for switched reluctance motor drives[J]. IEEE Journal of Emerging and Selected Topics in Power Electronics, 2015, 3(2): 381-394.
[22] Kurian S, Nisha G K. Current control with hysteresis controller and sliding mode controller in SRM[C]// IEEE International Conference on Signal Processing, Informatics, Communication and Energy Systems, Thiruvananthapuram, India, 2022: 1-6.
[23] Sun Xiaodong, Xiong Yefei, Yang Jufeng, et al. Torque ripple reduction for a 12/8 switched relu- ctance motor based on a novel sliding mode control strategy[J]. IEEE Transactions on Transportation Elec- trification, 2022, DOI: 10.1109/TTE.2022.3161078.
Direct Instantaneous Torque Control Method for Switched Reluctance Motor Based on an Improved Sliding Mode Control Strategy
(School of Electrical Engineering China University of Mining and Technology Xuzhou 221116 China)
The direct instantaneous torque control strategy of switched reluctance motor based on the traditional sliding mode control method has the problems of large chattering and long dynamic time. Also, the load torque must be observed in real time when the mechanical equation obtains reference torque. In order to solve the above problems, a direct instantaneous torque control strategy based on an improved sliding mode control method is proposed. Based on the traditional sliding mode surface and sliding mode approach rate, the state variable is introduced to reduce the torque fluctuation and dynamic process adjustment time of the motor under different working conditions. In order to effectively avoid the real-time calculation of the load torque, the system change caused by load disturbance is mapped to the evolution of the sliding mode surface. The adaptive law of the observed load disturbance is introduced into the sliding mode controller, and the system chattering is suppressed when the load torque and motor speed change. In addition, the dynamic response of the system is improved. The stability of the improved sliding mode controller is proved by the Lyapunov function. Simulations and experiments are carried out, and the results show that the method has good performance under steady-state, variable speed, and load conditions.
Switched reluctance motor (SRM), improved sliding mode control, direct instantaneous torque control, adaptive law
TM352
10.19595/j.cnki.1000-6753.tces.220424
国家自然科学基金(52007189)和中央高校基本科研业务费专项资金(2020QN65)资助项目。
2022-03-25
2022-06-10
韩国强 男,1990年生,博士,硕士生导师,研究方向为电机及其控制。
E-mail: hgq_sd@126.com(通信作者)
陆 哲 男,1997年生,硕士研究生,研究方向为电机及其控制。
E-mail: luzhe_07@163.com
(编辑 崔文静)
猜你喜欢
防爆电机(2021年4期)2021-07-28 07:42:46
科学技术创新(2020年3期)2020-03-24 10:30:58
中国惯性技术学报(2019年6期)2019-03-04 09:50:06
测控技术(2018年4期)2018-11-25 09:47:26
测控技术(2018年3期)2018-11-25 09:45:40
韶关学院学报(2018年6期)2018-07-21 02:20:22
电子设计工程(2017年20期)2017-02-10 03:40:05
北京航空航天大学学报(2016年7期)2016-11-16 01:50:55
锻造与冲压(2016年22期)2016-06-21 15:06:35
电机与控制应用(2015年1期)2015-03-01 03:49:08
