
基于VOF模型的真空吸鱼泵抽吸过程参数影响分析*
2022-12-02 06:03林礼群董晓妮王志勇张耀明徐志强
中国农机化学报 2022年12期
林礼群,董晓妮,王志勇,张耀明,徐志强
(中国水产科学研究院渔业机械仪器研究所,农业农村部远洋渔船与装备重点实验室,上海市,200092)
0 引言
随着我国大型养殖平台的快速发展,养殖作业装备受到也广泛关注[1-3]。其中,真空吸鱼泵流道无运动部件、损伤小、吸程大,是大型养殖平台比较理想的一种活鱼输送装备[4]。真空吸鱼泵分为间歇式抽气和连续式抽气两种形式,间隙式真空吸鱼泵采用单个集鱼筒循环抽吸与排放一定比例鱼水混合物,而连续式则采用双集鱼筒交替抽吸与排放一定比例鱼水混合物。两者在应用中均发现吸鱼管入口水的突入速度高、集鱼筒实际注满时间短、注满时集鱼筒鱼水密度小、集鱼筒内水不能及时排出等现象[5-6],这些现象均属于真空吸鱼泵操作参数响应下的吸鱼流动问题。吸鱼管道流速是影响抽吸效果的直接因素,而流速受抽气压力与吸程等参数影响,已有文献对真空吸鱼泵的研究大多以试验手段为主,且主要集中在结构参数设计选型、吸排方式、鱼水比等对吸鱼性能效果的影响[7-10]。针对真空吸鱼泵抽吸过程流动特征及流动控制参数影响的研究少有文献报道,古宽闵基于多相流理论,利用气力提升泵实现了远海网箱养殖中渔获的成功起捕;Ding等[11]设计了一种单罐真空吸鱼泵并用fluent计算得到了鱼水混合物内部流场的流动图和速度矢量图,表明设计真空吸鱼泵可以有效地减少鱼类碰撞伤害。这些研究并未关注到真空吸鱼泵入口速度变化规律、气液两相流动过程变化以及不同吸程匹配的抽气压力等理论问题,使得真空吸鱼泵优化设计工作开展不理想。
据此,以间歇式吸鱼真空泵为研究对象,建立多种不同吸程的真空吸鱼泵内部流道物理计算模型,基于计算流体力学中Volume of Fluid(VOF)两相流模型,对真空吸鱼泵抽吸过程内部气液两相流动过程进行数值模拟,研究真空吸鱼泵入口速度变化规律、气液两相流动过程变化以及不同吸程与抽气压力匹配关系,以期为真空吸鱼泵理论优化设计提供理论指导。
1 计算模型及边界条件
1.1 物理模型及网格划分
真空吸鱼泵抽吸方式采用间歇式吸排鱼方式,使用水环真空泵进行抽气,对吸鱼流道的抽吸过程进行计算,吸鱼流道包括吸鱼管道与集鱼筒内部,采用二维计算模型,如图1所示,集鱼筒容积为1.57 m3,集鱼筒内部长2 m,直径1 m,集鱼筒抽气出口径为0.04 m;吸鱼管入水口在水面以下0.3 m,文中建立了5种不同吸程H的真空吸鱼泵模型(表1),采用Ansys Workbench的mesh模块对吸鱼流道计算域进行结构建模及网格划分,为提高计算精度集收敛性,采用四面网格划分,不同吸程物理模型的网格见表1,正交质量均接近1,网格质量良好。

图1 吸鱼管道与集鱼筒流道示意图

表1 物理模型吸程参数与网格信息Tab. 1 Suction lift parameters and grid information of geometric model
1.2 控制方程与湍流模型
真空泵抽吸过程具有自由界面气液两相流动特性,采用瞬态VOF模型能够精确捕捉复杂自由界面气液两相流变化[11]。VOF方法通过引入体积函数ε确定气液界面,在所计算单元网格内:ε=0表示网格内全部是空气;ε=1表示网格内充满液体;0<ε<1表示网格内是气液混合体。其中,单元网格内混合流体的密度和黏度计算公式如式(1)、式(2)[12]所示。
ρm=εgρg+(1-εg)ρl
(1)
μm=εgμg+(1-εg)μl
(2)
式中:ρm——混合流体密度,kg/m3;
ρg——气体密度,kg/m3;
ρl——液体密度,kg/m3;
εg——气体体积函数;
μm——混合流体黏度系数;
μg——气体黏度系数;
μl——为液体黏度系数。
体积函数ε的输运方程,如式(3)所示。
(3)
式中:εp——第p相的体积函数,p=1,2分别表示液相和气相;
t——时间,s;
υ——流体速度,m/s。
混合流体流动的基本方程为连续方程和Navier-Stokes方程,如式(4)、式(5)所示。
(4)
(5)
式中:P——流体单元网格所受压力,Pa;
μ——流体动力黏度,Pa/s;
f——质量力,m/s2。
将瞬态的Navier-Stokes方程对时间平均可得含雷诺应力项的方程,选用Re-normalization groupk-ε(RNGk-ε)湍流模型建立封闭雷诺应力项方程组。RNGk-ε是基于重整化群数学方法推导得出,根据标准k-ε模型改进而来,该模型通过修正湍流黏度,考虑了湍流漩涡的影响,从而提高了强旋流动的模拟精度。描述RNGk-ε的控制方程,如式(6)、式(7)所示。
(6)

(7)
式中:k——湍动能,J;
ε——耗散率;
μe——有效混合黏度;
σk——k的有效普朗特数;
Gk——平均速度梯度引起的湍流动能产生项;
1.3 定解条件与求解器
所计算的5种案例中,除物理模型吸程高度不同外,边界条件与初始条件设置均相同。计算域边界条件的进口为管道入口,该位置接近水面,设置压力进口条件,进口压力为标准大气压101 325 Pa;由于真空吸鱼泵吸鱼驱动能本质是大气压与抽气负压形成压差能,因此,集鱼筒的抽气口设置为压力出口边界;考虑重力的影响,重力加速度方向竖直向下,与物理模型纵坐标负方向一致。空气为理想可压缩流体,设置为主相,水为不可压缩流体,设置为次相;抽吸过程为瞬态计算,初始时刻,气液交界面在水面处,气液交界面至入口处为水相段,水的体积分数为1;气液交界面以上的管路流道及吸鱼筒流道均为空气相,水的体积分数为0。计算时间步长设置为1.0×10-3s,保证每个时间步长内方程均方根残差小于1.0×10-4。数值求解采用有限体积法对控制方程进行离散,采用压力—速度耦合的Pressure-Implicit with Splitting of Operators (PISO)算法对离散后的控制方程进行求解。
2 计算结果及分析
2.1 吸程对入口速度影响分析
不同吸程的入口速度随时间变化如图2所示,其中,出口边界条件均设定为压力出口,值为-30 kPa,表示抽气压力,不同吸程下的入口速度在t=0.5 s左右均达到最大值且大于5.5 m/s,之后入口速度波动减小,变化趋势基本相似,至t=8 s及以后,入口速度变化较小且在1.4~2.0 m/s之间波动。将图2中的不同吸程下速度分布点整理为箱体图如图3所示,空心正方块代表速度均值,在所计算的吸程范围内,入口速度均值变化很小,吸程为2、3、4、5、6 m对应的均值入口速度分别为2.410、2.377、2.382、2.431、2.457 m/s,最大偏差仅3.4%,因为真空吸鱼泵的直接驱动能是由大气压力与抽气负压压差形成,由于压差能相同,由此转化给入口流体的动能也一致,因此初始流体入口速度相同,而几乎不受吸程大小的影响。图3中大部分速度值落在1.5~3.5 m/s区间,且最小值也大于1.4 m/s,该速度也比较有利于将鱼吸入管道。

图2 不同吸程条件下入口速度随时间变化
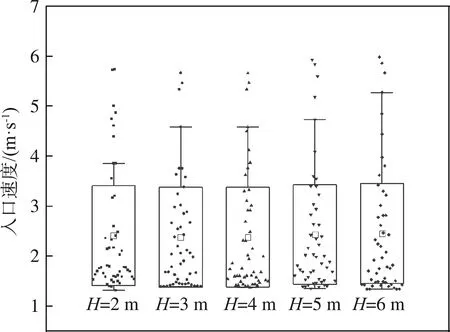
图3 入口速度箱体分布图
2.2 抽吸过程气液两相流分析
图4吸鱼管与集鱼筒内不同时刻的气液两相瞬时状态分析,其抽气压力设置为-30 kPa,吸程H分别为2、3和6 m:初始t=0 s时,气液交界面至管道入口均为水相,气液交界面以上的管路流道及吸鱼筒流道均为气相;t=0.6 s时,吸程H=2 m的模型中,水从入口进入管道刚好进入集鱼筒,而吸程H=3 m和H=6 m的模型中水运动至管道某位置,由于初始入口速度基本相等,所以经过相等时间后在管道内运动位移也基本相同;t=3 s时,各模型中水均在重力作用下倾斜向下流入到集鱼筒内,水流不断卷入周围气体相互掺混,使得集鱼筒内充满了大量水与气团组成的泡沫状气液两相混合体,产生掺气现象,集鱼筒内脉动增大,使管道内速度产生波动,模型的吸程越小,气液混合越剧烈;如图4(a)与图4(b)所示,之后气泡不断运动,并聚集成更大气团,气团逐渐上升向抽气口方向运动,直至与水一起流出集鱼筒的抽气口,而图4(c)中,由于吸程较大,需要克服更多势能才能进入集鱼筒,水进入集鱼筒时的动能较小,与吸程为2 m、3 m的模型相比,气液混合程度较弱。t=8 s 后,不同吸程模型的集鱼筒均只含有少量小气泡,流动趋于稳定。据此,抽气5 s左右,吸程H=2 m 和H=3 m的模型中集鱼筒内抽气口已有水流出,吸程H=6 m模型在7 s之前也有水从集鱼筒内的抽气口流出,至8 s,三种吸程模型下的集鱼筒均已注满水,即集鱼筒灌满时间很短,对真空吸鱼泵开关阀门的操作控制要求高。

(a) 吸程H=2 m

(b) 吸程H=3 m
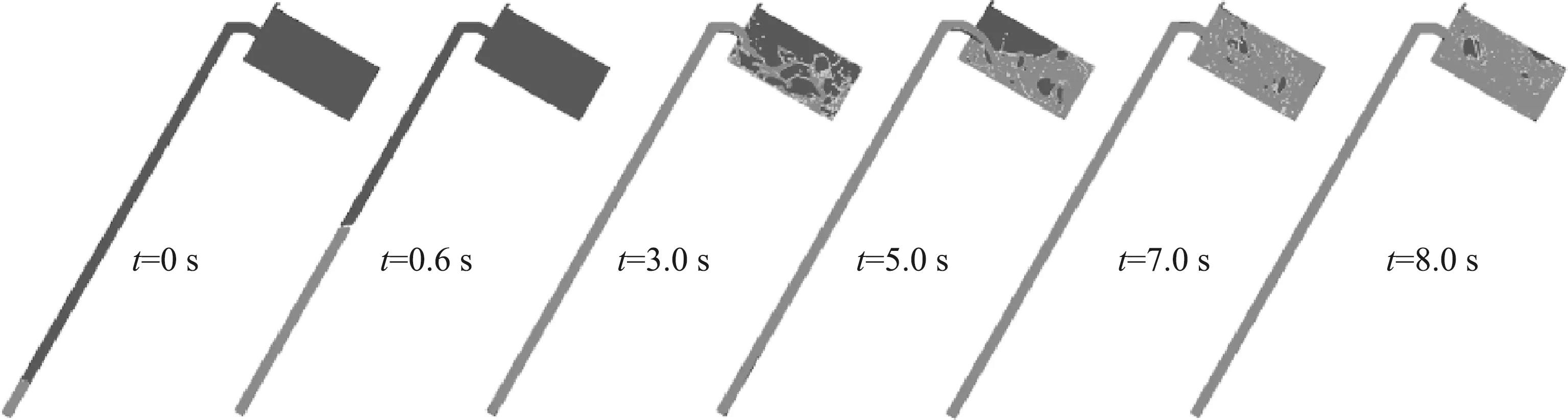
(c) 吸程H=6 m
2.3 不同吸程所需临界抽气压力分析
图5显示了吸程5 m的真空吸鱼泵在抽气压力为-20 kPa 条件下,不同时刻气液两相变化。t=1.8 s 时,管道内水恰好到达最大吸程处,在t=2.5 s时,管路部分水流入到集鱼筒内,其余水流倒流沿管向下,之后,水沿管道上下晃荡且无法到达最高吸程处,由于大气压与抽气口负压之间形成的压差不足,造成压力能不足,加上流体与壁面摩擦作用造成能量耗散,管内水不再到达管道最高位置而流到集鱼筒。此过程中提供的抽气负压-20 kPa刚好能使管道内水恰好到达最大吸程处,该压力称为临界压力。若进一步减小抽气压力,使得大气压与抽气负压之间压差增大,至足以提供能入口段水足够动能,则水会从管道入口不断被抽入到集鱼筒。

图5 不同时刻气液两相图
据此对吸程为2、3、4、6 m的吸鱼泵抽吸过程所需的临界抽气压力进行试算,得出不同吸程对应的临界压力分别为-13、-14、-16、-25 kPa,如图6所示,进一步对计算值进行曲线多项式拟合,得到吸程与临界压力关系式为y=-40.263-6.386x-0.305x2-0.004 95x3。根据该关系表达式,可得出同一真空吸鱼泵在不同吸程条件下所需最大抽气负压值。在实际抽吸过程中,集鱼筒出口抽气压力很难保持恒值,且随着抽气的进行,集鱼筒内真空度的增大,抽气口压力进一步减小,更有利于抽吸鱼水混合物到集鱼筒,这也是目前大多数真空吸鱼泵选择抽吸鱼水之前先进行预抽气的机理。

图6 吸程与临界抽气压力关系式
3 结论
通过采用VOF模型对真空吸鱼泵集鱼装置内部抽吸过程水气两相流动过程进行数值计算,得到抽气压力与吸程及入口速度之间的关系,以及不同吸程下气液两相流动特性。
1) 不同吸程H分别为2、3、4、5、6 m的模型在同一定值抽气压力-30 kPa作用下,管道入口速度随时间变化趋势相似且速度不断波动减小,管道均值入口速度分别为2.410、2.377、2.382、2.431、2.457 m/s,最大偏差不到3.4%,这是由于真空吸鱼泵的直接驱动能是由大气压与抽气负压之间的压差形成,由此转化给入口流体的动能相等,表明吸鱼管入口速度几乎不受吸程的影响。
2) 管道内水抽吸至集鱼筒后,水流不断卷入周围气体,使得集鱼筒内充满大量水与气团组成的泡沫状气液混合体,产生掺气现象,集鱼筒内脉动增大,使管道内速度产生波动,至t=8 s,流动已趋于稳定,不同吸程模型下的集鱼筒均已注满水,集鱼筒灌满时间短。
3) 临界抽气压力作用下,管道内水恰好能到达最大吸程处,之后沿管道上下晃荡且无法到达最高吸程处,吸程为2、3、4、5、6 m的吸鱼泵抽吸过程所需的临界抽气压力分别为-13、-14、-16、-20、-25 kPa,拟合得到吸程与临界抽气压力关系式为y=-40.263-6.386x-0.305x2-0.004 95x3,可得出同一真空吸鱼泵在任意吸程条件下所需最大抽气负压值,为真空吸鱼泵吸程匹配抽气压力设计提供理论参考。
猜你喜欢
中国交通信息化(2022年4期)2022-06-17
北京航空航天大学学报(2021年9期)2021-11-02
北京航空航天大学学报(2021年6期)2021-07-20
科技视界(2021年4期)2021-04-13
中国交通信息化(2020年7期)2021-01-14
中国特种设备安全(2019年9期)2019-12-03
疯狂英语·新悦读(2019年5期)2019-05-15
动漫星空(兴趣百科)(2018年5期)2018-10-26
少年文艺·开心阅读作文(2017年12期)2017-12-21
北京航空航天大学学报(2017年11期)2017-04-23
