基于DIgSILENT与PSASP的DFIG模型对比与仿真研究
2022-12-01 02:53张宇秦文萍王科朱志龙薛邵锴
南方电网技术 2022年10期
张宇,秦文萍,王科,朱志龙,薛邵锴
(电力系统运行与控制山西省重点实验室(太原理工大学),太原030024)
0 引言
风力发电是以化石能源为主的传统能源结构向绿色低碳转型升级的重要途径之一,以风电为代表的可再生能源装机容量在电力系统中的占比不断提高[1 - 2]。双馈风电机组(doubly fed induction generator, DFIG)凭借其功率解耦控制、变流器容量小等特点成为风力发电的主力机型。然而,由于DFIG经电力电子变流器柔性并网且控制系统十分复杂,风电大规模并网将给电力系统的安全稳定运行带来重要影响[3 - 4]。
电力系统时域仿真技术是分析电力系统动态行为与稳定性的重要技术手段[5 - 6]。现有的电力系统仿真软件有很多种,具有代表性的有中国电力科学院开发的PSASP、德国DIgSILENT GmbH公司开发的集成化电力系统仿真程序DIgSILENT/PowerFactory、实时数字仿真系统RTDS等[7 - 8]。然而,由于这些仿真软件的开发背景、面向问题等不同,所提供DFIG仿真模型的模型结构/简化程度、控制策略等也有所不同[9],在风速波动、短路故障、负荷变化等不同的仿真事件下得到的仿真结果可能有较大偏差;且随着风电渗透率的提高,这种偏差可能被累积和放大。
现有关于电力系统仿真技术的研究往往更关注仿真能否准确反映真实系统的物理行为[10 - 12],而对不同仿真软件仿真结果的差异重视不够。文献[13]对PSASP与PSS/E中的DFIG模型进行了对比分析,通过仿真算例,以同步发电机的功角差作为观测量评估了两种软件在不同风电渗透率下的机电暂态仿真一致性,但并未对两种软件中DFIG的输出特性进行对比分析,无法从模型机理上解释仿真一致性变化的原因。
本文将对PSASP和DIgSILENT中DFIG动态行为的差异进行比较与分析。PSASP是国内应用最广的经典机电暂态仿真软件,与之相比,DIgSILENT以在风电等新能源发电建模仿真分析中的应用著称,在风电领域的独特性主要表现在更加精细化的风电机组模型和风电机组控制模型上[14],不仅可以用于机电暂态仿真也可用于电磁暂态仿真。本文将对PSASP的8型DFIG通用模型与DIgSILENT中的DFIG通用模型进行对比。首先分析两者在风轮机及控制模型、发电机/变流器及变流器控制模型上的差异,根据模型差异设置相应的仿真场景,通过仿真对比两种软件DFIG输出特性的不同,进而研究两种软件DFIG模型的特点与适用性,为风电大规模并网仿真分析提供参考,能够根据实际系统特点和研究目的来选择合适的仿真分析工具,确保仿真结果的准确性。
1 DIgSILENT与PSASP的DFIG模型对比
1.1 整体架构对比
DFIG的原理图如图1所示,主要包括风轮机、感应发电机、转子侧变流器(rotor side converter, RSC)、网侧变流器(grid side converter, GSC)、三绕组升压变压器、保护系统等模块。

图1 DFIG原理图Fig.1 Schematic diagram of DFIG
1.1.1 PSASP中DFIG模型整体架构
PSASP中DFIG模型来源于GE公司的双馈感应风力发电机模型,模型的整体架构按照功能可以划分为3个部分:风轮机及控制模型、发电机/RSC模型和RSC控制模型[15],如图2所示。

图2 PSASP中DFIG模型整体架构Fig.2 Overall architecture of the DFIG model in PSASP
1.1.2 DIgSILENT中DFIG模型整体架构
DIgSILENT中DFIG的模型整体架构[16]与PSASP相似,可以划分为同样的3部分,不同的是还包含了保护系统的模型,如图3所示。
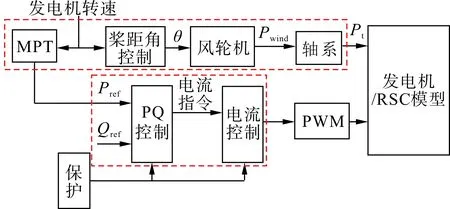
图3 DIgSILENT中DFIG模型整体架构Fig.3 Overall architecture of the DFIG model in DIgSILENT
不同于PSASP中的DFIG模型,DIgSILENT中DFIG的通用模型在图3的基础上还可以进一步扩展,对直流母线、GSC及GSC控制进行建模,如图4中虚线框所示,GSC控制将在1.3.3节中详细介绍。

图4 DIgSILENT中DFIG通用模型扩展Fig.4 Extension of DFIG general model in DIgSILENT
1.2 风轮机及控制模型对比
1.2.1 DIgSILENT中风轮机及控制模型
DIgSILENT中DFIG风轮机及控制模型如图5所示。
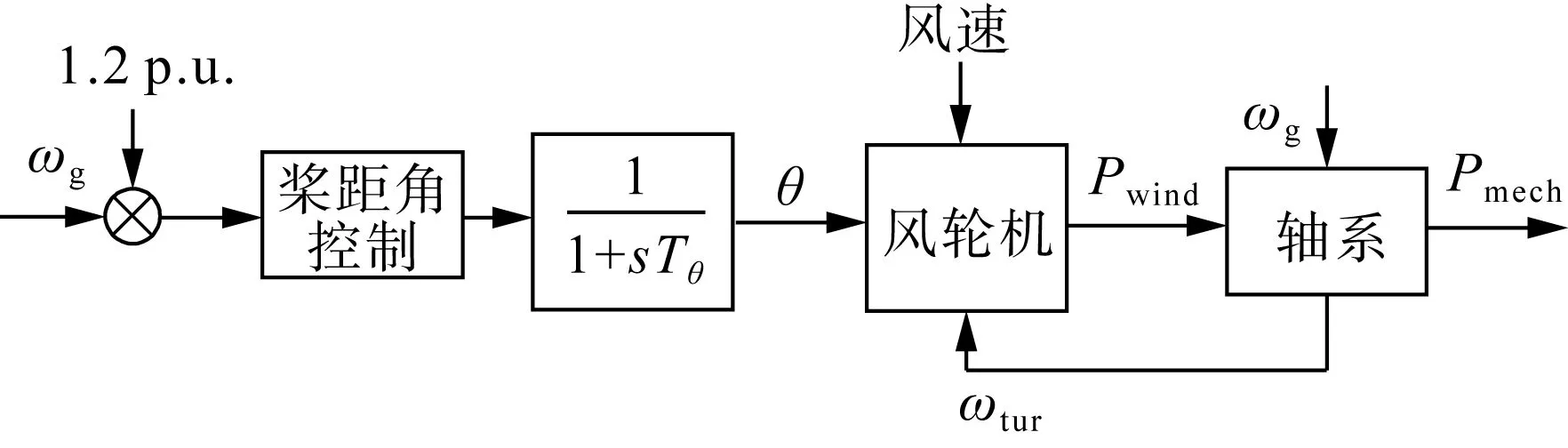
图5 DIgSILENT中风轮机及控制模型Fig.5 Wind turbine and control model in DIgSILENT
在DIgSILENT中,通过调节桨距角控制来防止发电机过速,转速上限参考值由用户设定,默认值为1.2 p.u.。当转速超过1.2 p.u.时,通过增加桨距角来降低转速从而将转速限制在参考值附近。根据转速和最大功率跟踪特性得到有功功率指令值后,接入RSC控制中。
1.2.2 PSASP中风轮机及控制模型
PSASP中DFIG风轮机及控制模型如图6所示。

图6 PSASP中风轮机及控制模型Fig.6 Wind turbine and control model in PSASP
在PSASP中,当未达到满载功率或上层指令功率时,转速误差控制和功率误差补偿控制输出为0,桨距角原则上为0,根据输出有功功率和最大功率跟踪特性得到转速指令值,并通过调节电磁转矩控制(即调节有功功率)实现对转速的控制。当达到满载功率或上层指令功率时,转速误差控制和功率误差补偿控制将会提高桨距角指令值,以减小输入的机械功率。
可以看出,DIgSILENT中风轮机及控制模型与PSASP有很大不同,主要体现在控制策略上。
1.3 发电机/变流器模型及变流器控制模型对比
1.3.1 发电机/RSC模型对比
1)DIgSILENT中发电机/RSC模型
在DIgSILENT中,通过一个与转子阻抗串联的变流器扩展了普通感应电机,如图7所示。用户可以在基础数据页选择使用与双馈感应发电机模型集成在一起的RSC模型。RSC通过改变转子电压的幅值和相角,实现了对发电机的灵活快速控制。对于潮流计算和机电暂态仿真初始化,只需指定有功功率、无功功率以及滑差即可。

图7 DIgSILENT中双馈感应发电机及RSC等效电路Fig.7 Equivalent circuit of the DIgSILENT doubly fed induction generator and RSC
DIgSILENT所使用的是未经简化的五阶发电机模型,不仅可以用于机电暂态仿真,还可以用于电磁暂态仿真。在DIgSILENT中,双馈感应发电机及RSC模型均被封装,无法看到详细模型。
2)PSASP中发电机/RSC模型
在PSASP中,因为变流器电气控制响应速度较快,因而发电机模型中励磁系统的动态都被简化,将实际发电机等效成一个可控电流源,向电网注入可控电流。RSC的动态用两个延迟环节来模拟,相关参数被设置为0.02,且无法更改[17]。
在机电暂态仿真中,忽略定子暂态得到发电机的三阶模型如图8所示。

图8 PSASP中忽略定子暂态的三阶发电机模型Fig.8 A third-order generator model ignoring stator transients in PSASP
进一步忽略定子电阻,得到更为简化的三阶模型[18],即PSASP所用的发电机模型,如图9所示。

图9 PSASP中进一步忽略定子电阻的三阶发电机模型Fig.9 A third-order generator model further neglecting stator resistance in PSASP
PSASP中的发电机/RSC模型如图10所示。
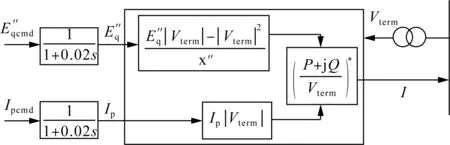
图10 PSASP中双馈感应发电机及RSC模型Fig.10 Model of doubly fed induction generator and RSC in PSASP
显然,DIgSILENT中双馈感应发电机及RSC模型阶数更高,仿真结果更为精确,但是就电力系统稳定性分析所用的机电暂态仿真而言,PSASP中的模型已经可以满足要求。
1.3.2 RSC控制模型对比
1)DIgSILENT中RSC控制模型
在并网条件下,只有定子电流是可控的,所以对发电机功率的控制可以转化为对定子电流的控制[19]。因此,在DIgSILENT中RSC控制由两级PI控制器实现,第一级由响应最快的电流控制器组成,电流指令值由响应较慢的第二级功率控制器给出。DIgSILENT中的RSC控制模型如图11所示,其中bypass为保护系统控制信号,将在1.3.4节进行介绍。
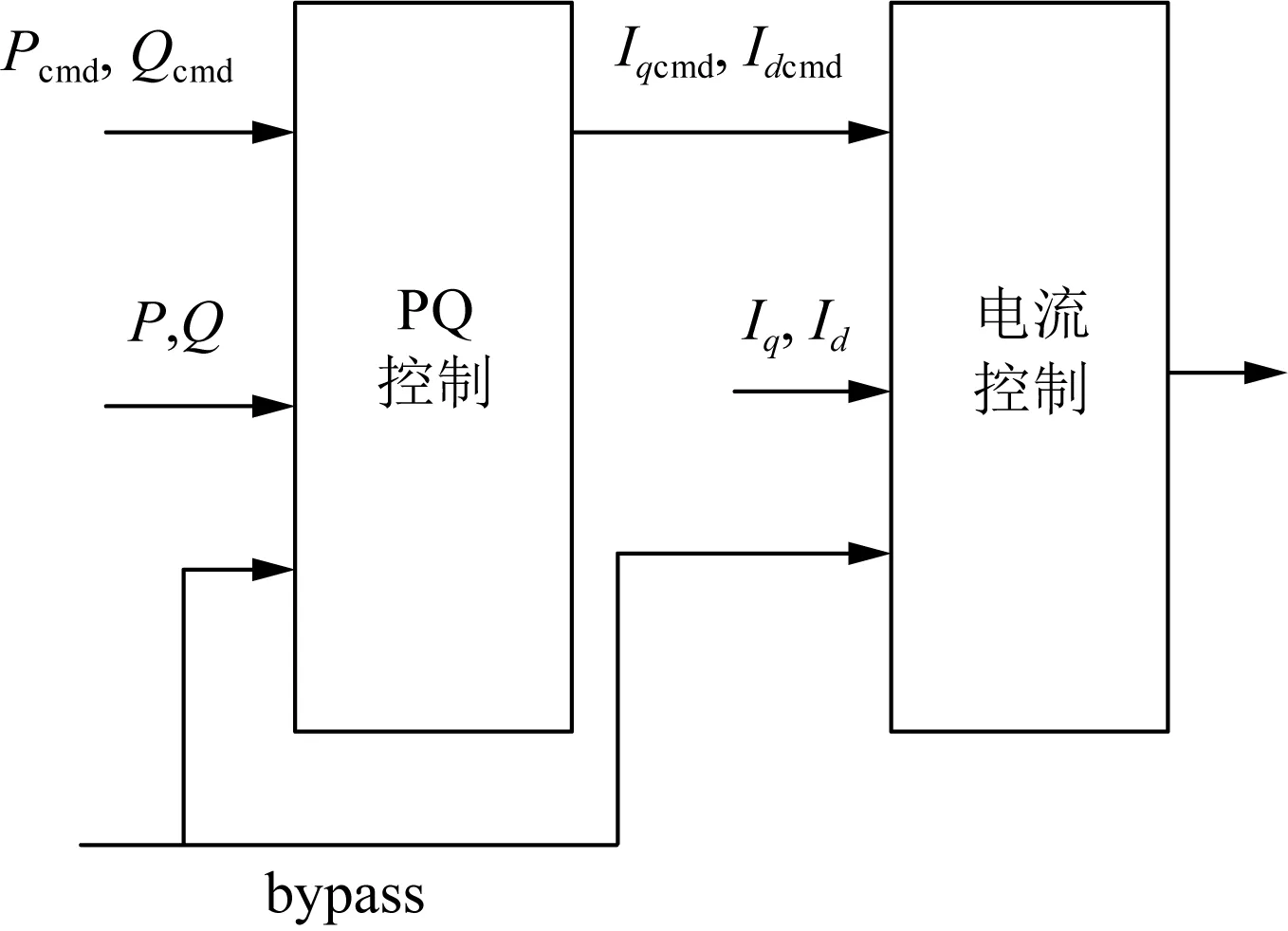
图11 DIgSILENT中RSC控制模型Fig.11 Model of RSC control in DIgSILENT
DIgSILENT中RSC控制在定子磁链定向参考系中运行,即转子电流需要先变换到定子磁链定向参考系中[20]。定子磁链定向由定子磁链观测器实现,如图12所示。
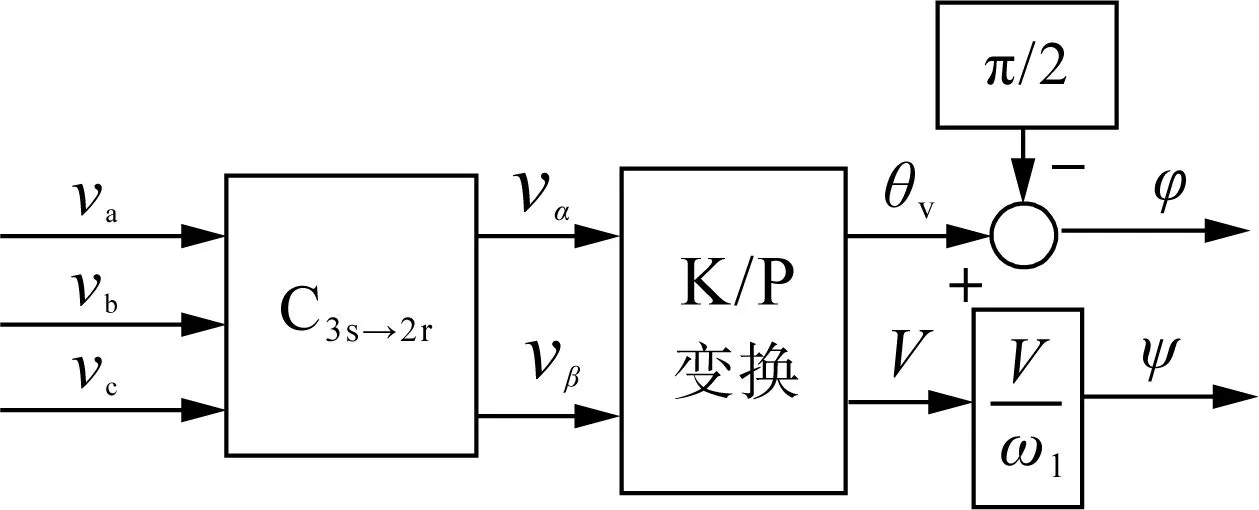
图12 DIgSILENT中定子磁链观测器Fig.12 Stator flux observer in DIgSILENT
并网运行的DFIG,其定子电阻要比电抗小得多,可以忽略不计。由静止坐标系下的定子电压表达式,略去定子电阻后定子磁链矢量与定子电压矢量的相位差为90 °,如图13所示。显然,这与跟踪电网电压频率和相位的锁相环(phase locked loop, PLL)本质上并无差别,只是跟踪的矢量不同。
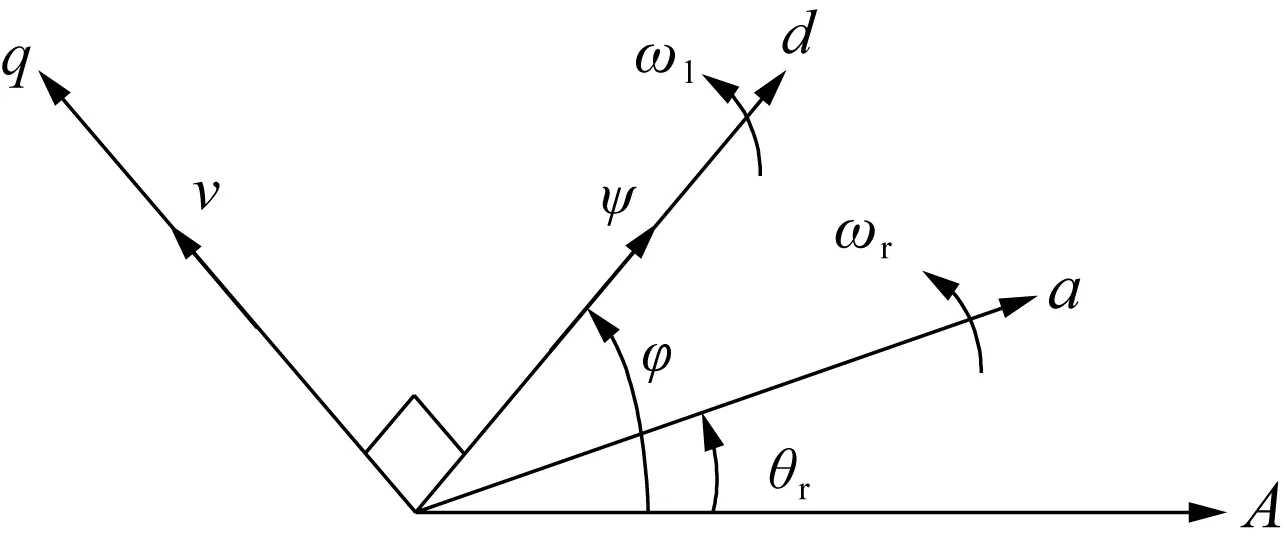
图13 DFIG空间矢量示意图Fig.13 Sketch diagram of DFIG space vector
另外,在DIgSILENT中,无功功率指令值Qcmd并未给定,由用户根据需要进行建模。
2)PSASP中RSC控制模型
在PSASP中,RSC控制模型如图14所示。

图14 PSASP中RSC控制模型Fig.14 Model of RSC control in PSASP
其中,有功功率指令值经由风轮机模型提供,无功功率指令值经由风电场能量管理系统(wind park management system, WPMS)模型提供。WPMS模型如图中黑色点划线框所示。监测点电压在叠加线路压降补偿后,与参考电压进行比较,经过PI控制器后得到无功指令值。励磁控制器模型如图中红色虚线框所示。监测发电机无功功率Qg和端电压Vterm,计算励磁电势E″qcmd。有功电流指令Ipcmd由风轮机控制模型给出的有功功率参考值除以机端电压得到,受变流器短时有功电流输出能力的限制。
可以看出,两种仿真软件在RSC控制模型上最大的不同在于DIgSILENT不具备PSASP中的WPMS模型,无功功率指令值模型需要由用户搭建。另外,在PSASP中,有功电流是直接通过风轮机控制模型给出的有功功率指令值与端电压相除得到,并没有经过PI控制器的响应,即忽略了有功功率外环和有功电流内环的动态。因此,无法根据控制带宽对PSASP中RSC控制进行响应时间尺度的划分,而DIgSILENT中RSC控制未进行简化,所以若研究DFIG的转子转速、直流电压、电感电流等多时间尺度控制特性[21],选择DIgSILENT软件更合适。
由于PLL的动态过程极快,故在PSASP中RSC控制模型忽略了PLL的动态。在PSASP中PLL的目的是实现并网电流与电网电压的同频同相,而DIgSILENT中,定子磁链观测器的目的是实现有功功率和无功功率的解耦控制。
1.3.3 GSC控制模型对比
在DIgSILENT中,GSC控制由两级控制器构成,第一级为电流内环,第二级d轴为电压外环以保持直流母线电压恒定,q轴电流指令值为0,以实现单位功率因数控制,如图15所示。GSC控制由PLL实现电网电压定向。

图15 DIgSILENT中GSC控制模型Fig.15 Model of GSC control in DIgSILENT
在PSASP中,在直流母线电压保持恒定的假设下,没有对直流母线、GSC及GSC控制进行建模。因此,在PSASP中,风轮机控制模型给出的有功功率指令值控制DFIG总的输出功率,而在DIgSILENT中,风轮机控制模型给出的有功功率指令值控制的是DFIG定子输出功率。
1.3.4 保护系统模型对比
在DIgSILENT中,对DFIG的保护进行了建模,包括过压/欠压保护、过速/欠速保护、Crowbar保护,如图16所示。而在PSASP中不包含保护模型。

图16 DIgSILENT中保护系统模型Fig.16 Model of protection system in DIgSILENT
2 算例仿真
2.1 仿真测试系统
本节分别在DIgSILENT和PSASP中搭建三机九节点测试系统,如图17所示。
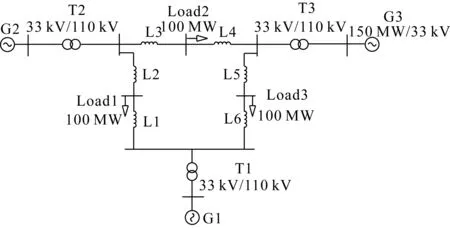
图17 测试系统Fig.17 Test system
在测试系统中,G2为DFIG,相关参数如表1所示。G1、G3为同步发电机;T1—T3为变压器,Load1—Load3为负荷,L1—L6为线路,具体参数如图17所示。

表1 DFIG参数Tab.1 DFIG parameters
2.2 风速波动下DFIG特性仿真对比
设置风速如图18所示,使DFIG运行于高于和低于初始风速两种工况,并叠加随机噪声风[22 - 23]。
基于PSASP和DIgSILENT仿真,DFIG的桨距角、转速、机械功率、输出有功功率如图19所示。其中PSASP耗时4.829 s,DIgSILENT耗时28.25 s。

图18 风速波动曲线Fig.18 Wind speed fluctuation curve

图19 风速波动下DFIG特性仿真对比Fig.19 Simulation comparison of DFIG characteristics under wind speed fluctuations
从图19可以看出,与DIgSILENT相比,PSASP中DFIG的桨距角、转速、机械功率和有功功率的波动幅度较大,更容易受到风速波动的影响。在PSASP中,DFIG的转速始终在1.2 p.u.附近波动,而在DIgSILENT中,DFIG的转速随着风速的升高而升高,达到转速上限1.2 p.u.后,通过调节桨距角将转速限制在1.2 p.u.附近。
2.3 三相短路故障下DFIG特性仿真对比
设置线路L6的50%处发生三相短路故障,故障持续时间为1.0~1.12 s。由于PSASP中未对保护系统建模,为了便于分析,在DIgSILENT中,设置保护系统模型为切出状态。DIgSILENT和PSASP中DFIG的端电压、机械功率、输出有功功率、转速、桨距角如图20所示,其中PSASP仿真耗时0.26 s,DIgSILENT仿真耗时0.93 s。从图20中可以看出,在线路L6发生三相短路故障后,两种软件中DFIG端电压均跌落至0.4 p.u.左右。

图20 三相短路故障下DFIG特性仿真对比Fig.20 Simulation comparison of DFIG characteristics under three-phase short-circuit faults
在端电压跌落瞬间,DFIG输出的有功功率瞬间下降,输入机械功率近似保持不变,根据转子运动方程,发电机转速升高。此时,在PSASP中机械功率是升高的,而在DIgSILENT中机械功率是降低的,这是由于两种软件中DFIG的稳态运行点不同造成的。

图21 风能利用系数曲线Fig.21 Wind energy utilization coefficient curve

故障清除后,在PSASP中端电压、功率以及转速都在较短时间内恢复了稳定,而在DIgSILENT中,则出现了较长时间的振荡,恢复稳定的时间较长。这是因为在PSASP中,通过调节桨距角控制发电机转速,使之尽快过渡到稳态运行点,而在DIgSILENT中,由于转速未超过最高设定值1.2 p.u.,所以桨距角控制未动作,转速只能逐渐振荡衰减恢复到稳态值。
2.4 负荷扰动下DFIG特性仿真对比
设置Load1在1.0 s时突增至1.2 p.u.,两种仿真软件中DFIG的端电压、输出有功功率、输出无功功率、输出电流如图22所示,其中,PSASP仿真耗时0.18 s,DIgSILENT仿真耗时0.84 s。

图22 负荷扰动下DFIG特性仿真对比Fig.22 Simulation comparison of DFIG characteristics under load disturbance
从图22中可以看出,在负荷突增瞬间,PSASP中DFIG的输出有功功率瞬间下降,而在DIgSILENT中,输出有功功率是瞬间升高的。可以从PSASP中DFIG的发电机/RSC模型来解释,如图10所示。在负荷突增瞬间,端电压有一定程度的瞬间跌落,有功指令电流Ipcmd瞬间升高,由于采用一阶惯性环节模拟发电机/RSC响应过程,实际有功电流Ip近似认为还未变化,所以输出有功功率Ip|Vterm|瞬间下降。又由于一阶惯性环节的时间常数很小,仅为0.02 s,所以实际有功电流Ip很快达到指令值,输出有功功率也很快升高。而在DIgSILENT中,输出有功功率没有出现类似先瞬间跌落再升高的过程,因为在DIgSILENT中,没有对发电机/RSC进行简化建模,反映的是实际发电机/RSC的响应。
图22中,PSASP中DFIG的端电压在跌落后逐渐升高,而DIgSILENT中,端电压在小幅跌落后并没有升高。从输出无功功率可以看出,在PSASP中WPMS系统检测到端电压跌落,开始增发无功功率,而在DIgSILENT中没有类似无功功率补偿控制,但允许用户根据需要搭建。
2.5 DIgSILENT与PSASP中DFIG模型差异对比
DIgSILENT与PSASP中DFIG模型差异对比如表2所示。
3 结论
本文研究了DIgSILENT与PSASP中DFIG模型的特点及适用性以及差异,设置相应的仿真场景对两种仿真软件中DFIG动态行为进行对比。从模型构造和仿真结果两方面对比了DIgSILENT的DFIG模型和PSASP的8型DFIG通用模型,分析了两者在风轮机及控制模型、发电机/变流器及变流器控制模型上的异同。

表2 DIgSILENT与PSASP中DFIG模型差异对比Tab.2 Comparison of DFIG model differences between DIgSILENT and PSASP
通过模型对比和仿真分析结果可以看出,DIgSILENT中的DFIG模型更详细,同时允许用户方便地对DFIG模型进行更改和完善,但对于风电大规模并网仿真分析来说,过于详细的模型会导致仿真速度过慢;而PSASP中的8型DFIG模型基于假设进行了一定的简化,其简化具有一定的合理性,并且对于机电暂态仿真而言,模型精度基本可以满足要求。除此之外,两种软件在控制策略等方面也存在差异,所以在进行仿真分析时应综合参考不同软件的仿真结果,而不能轻易以一种软件为标准。
在后续研究中,将进一步对更多的仿真软件中DFIG模型进行对比和仿真分析,同时,将查阅风电场的现场实测数据作为参考,对不同仿真软件的模型精确性、适用性及简化合理性做出评价。
本文所得结论可为风电并网仿真分析提供参考,具有理论和实用价值。
猜你喜欢
微电机(2019年3期)2019-04-28
电源技术(2016年12期)2017-01-10
微特电机(2016年3期)2016-11-29
电测与仪表(2016年8期)2016-04-15
通信电源技术(2016年4期)2016-04-04
通信电源技术(2016年5期)2016-03-22
学习月刊(2015年22期)2015-02-28
环球市场信息导报(2015年48期)2015-01-03
中国航海(2014年1期)2014-05-09
都市快轨交通(2014年4期)2014-02-27