
基于ARM 的温度智能控制系统设计
2022-12-01 06:00:46高磊刘祥言
电子设计工程 2022年23期
高磊,刘祥言
(中国电子科技集团公司第二十七研究所,河南 郑州 450047)
高低温实验箱是环境实验中的最常见设备之一,其功能是为被测设备提供设定的温度环境,需要实现对箱内温度的高精度稳定控制。随着环境测试要求的提高,对其温度控制系统的控制精度及自适应性提出更高的目标。温箱的热量传导具有时延性、非线性、时变性等特征[1-3],仅采用传统的PID 线性控制器很难实现控制性能的进一步提升。另外,随着计算机技术、控制技术的发展,温箱控制系统向着数字化、智能化方向发展,智能控制算法得到更深入的应用。该文采用RAM 微处理器作为核心控制处理器,利用Pt100 热电阻作用于温度敏感器件,通过放大、滤波等信号处理方法,实现温度的高精度检测,并通过脉宽调制(Pulse Width Modulation,PWM)波实现对功率电阻发热量的高精度控制,并将遗传算法应用于经典PID 线性控制算法中,构建高精度智能温度控制方案,实现对温箱温度的精确控制。
1 系统硬件设计
温度控制系统主要由微处理器、温度传感器、功率驱动电路、温箱本体等部分组成,系统硬件结构如图1 所示[4]。其中,微处理器选用ARM 处理器,作为运算与控制核心,负责温度的采集、控制算法的运算及功率电路的控制,保证温度的精确跟踪指令轨迹。

图1 温度控制系统硬件结构
温度控制的主要原理:利用Pt100 传感器获取温度信号,对温度信号进行信号调制、滤波、偏置处理,经过A/D 转换将其转换为数字信号输入至微处理器,将设定的期望温度值与实际采集的数值进行差值运算,得到温度误差,将误差值输入温度控制算法,通过运算控制器输出相应占空比的脉宽调制波,通过PWM 波控制功率驱动电路的通断,从而控制温箱的发热量,最终将输出温度收敛至期望值。系统硬件电路的关键部件包括温度传感器电路、功率驱动电路、微处理器三部分,下文将具体介绍这三部分的设计。
1.1 温度传感器电路
Pt100 热电阻具有良好的线性度,在高精度温度测量中得到广泛应用。该文选用Pt100 热电阻作为温度敏感器件,结合测量电路、放大器、滤波器及数模转换等电路,构成高精度温度传感器采集电路,其电路结构如图2 所示。Pt100 热电阻的温度变化系数很小,温度每变化1 ℃,阻值变化0.39 Ω。为了保证热电阻的良好线性度,采集电路选择四线制接法,将激励电电流和电压检测端分开,实现对Pt100 热电阻压降值的精确测量。

图2 温度传感器采集电路
Pt100 热电阻两端的测量信号流入放大器,信号经过放大与低通滤波后,经过A/D 模数转换,转化为便于微处理器运算的数字量。其中,电阻R3、R4为电压采集引线电阻,电阻取值较高,从而保证放大器输入端具有非常高的阻抗,放大器输入端电流接近于零,从而保证了激励电电流和电压检测端之间的隔离,提高温度检测精度。Pt100 热电阻两端的测量信号非常微弱,需要经过放大器将信号放大,选用的仪表放大电路具有很高的共模抑制比,可有效抑制无用的共模分量。另外,为了抑制信号中混入的干扰信号,引入二阶低通滤波器对信号的高频噪声进行抑制。同时,经过A/D 模数转换获得的数字信号,可采用去极值和平均滤波等数字滤波方法进一步进行滤波处理,降低噪声对真实信号的干扰。
1.2 功率驱动电路
温箱主要采用加热棒作为热源,加热棒的主要构成部分是铝壳功率电阻,其具有良好的散热性能,通过控制功率电阻中通过的电流,从而控制功率电阻的发热量[5-6]。系统主要通过控制脉宽调制(PWM)波的占空比,以控制功率电阻中的电流通断,从而实现对平均加热功率的控制。功率驱动电路如图3 所示,其核心部件为一个P沟道MOS管,利用其开关特性实现驱动电路的通断控制,电阻R2的作用是保证功率管的源极与栅极之间的电压值保持在极限值以下。
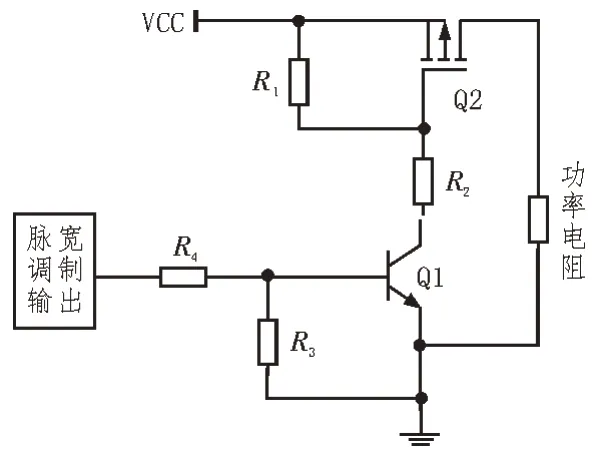
图3 功率驱动电路
1.3 微处理器
综合考虑温控系统数据运算、外围扩展、人机交互、数据存储等需求,系统选用基于ARM 结构的S3C2440A 处理芯片,该芯片具有独立内存管理单元,采用厚度0.188 mm 的工艺、AMBA 总线结构,其工作主频高达400 MHz,运算速度及数据存储能力可满足控制算法需求。另外,该芯片支持Thumb 的16位指令集,具备32 位系统性能,可装载Linux 操作系统,为人机交互界面和智能存储提供了良好运行环境[7-8]。基于S3C2440A 处理芯片的嵌入式系统具有容量大、成本低、信息存储可靠等优势,可提高数据的运算、存储速度,有利于高低温测试数据的高效管理。另外,可对处理器的FLASH 空间进行外扩,采用Samsung 公司推出的K9F1208 FLASH 存储芯片,该芯片的存储容量高达8×64 MB,具备16 位数据宽度,内部空间拥有32 块分区,实现存储空间的大幅度扩充,为实验数据提供了充足的存储空间。
2 温度控制算法设计
经典PID 控制算法具有结构简单、鲁棒性强的特点,在温度控制工程中得到广泛应用,对线性时不变控制对象表现出良好的控制性能[9-11]。经典PID 控制算法结构如图4 所示。
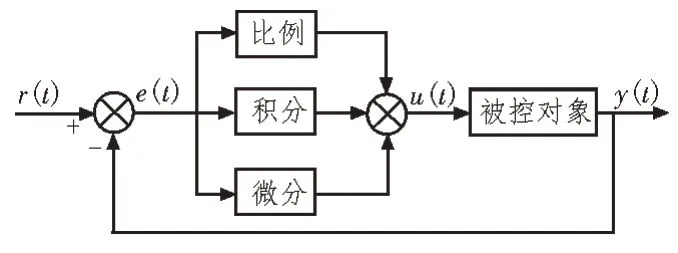
图4 经典PID控制算法结构
其以输出误差作为控制器的输入量,输入输出的关系表达式为:

式中,u(t)表示控制器输出量,e(k)表示设定值与实际输出之间的误差,kp、ki、kd分别表示比例、积分和微分参数。
实际的温箱温度变化具有非线性和时变性,仅采用传统PID 控制器具有一定的局限性,很难对控制稳定精度和抗扰能力进一步提升。传统PID 控制器的参数整定多采用经验试凑法,存在一定的随机性,需要已知被控对象的精确模型及其参数,工程上很难获得被控对象的精确模型,整定的控制参数无法实现最优控制。另外,已确定的控制参数,随着控制系统随时间的变化与摄动,控制性能发生变化,偏离原设定的控制效果,系统自适应性不足。传统PID 控制器参数整定需要进行大量实验调试,需要消耗大量精力和时间,不利于节约成本。为了提高控制器的控制性能和自适应性,出现了多种智能控制算法,包括鲁棒控制、自抗扰控制、自适应控制、神经网络、遗传算法等[12-16]。将智能算法与PID 算法结合,可衍生出多种先进PID 控制算法,以提高系统的动态响应性能和稳定精度。
其中,遗传算法是仿生“优胜劣汰”原则的搜索最优解算法,针对复杂非线性问题具有较强的求解能力。将遗传算法与PID 算法相结合,构成基于遗传算法的PID 改进控制算法,其控制系统结构如图5所示。

图5 基于遗传算法的PID改进控制系统
遗传算法主要原理:首先生成一组初始种群,其中每个个体为控制参数kp、ki、kd的不同组合,然后建立适应函数,并通过适应函数对种群个体进行评价,按照“优胜劣汰”原则筛选出适应度高的个体,并对个体进行遗传操作,主要包括交叉和变异,从而使得高适应度个体基因得到遗传,产生适应度更强的新一代种群,经过多代遗传和进化,最终获得性能最优的一组控制参数。具体可包括以下步骤。
步骤1:参数编码。对PID 控制器的三个参数设定进化范围,根据温箱控制知识经验,三个控制参数的设定范围:kp∈[0,10],ki∈[0,1],kd∈[0,10]。根据经典PID 控制器设计方法,为控制参数设定一组合适的初始值。
步骤2:建立适应度函数。温度控制系统主要关注系统的动态响应指标和静态稳态指标,反映控制系统动态指标的参数主要为系统阶跃响应的超调量和上升时间,反映稳态指标的主要参数是稳态误差。结合控制系统的动态响应指标和静态稳态指标,遗传算法的适应度函数设定为:

式中,J表示适应度函数,其数值越小表示该个体的适应度越强,σ表示系统阶跃响应的超调量,tr表示系统阶跃响应的上升时间,α表示衡量参数重要度的权重值,e(t)表示期望输出与实际输出之间的差值。
步骤3:选择、交叉、变异操作。选择操作是指按照适应度从高到低对个体进行排序,然后淘汰一定比例适应度低的个体,设定淘汰率为0.5。将剩余个体进行交叉和变异操作,从而产生新的个体以填充个体数目,保持种群总数的不变。选取随机交叉策略,在参数设定区间内产生随机数,如果随机数超出了设定的阈值,则对个体进行交叉操作。选取均匀变异策略,取一定的变异概率,当个体触发变异事件则对个体进行随机变异操作。
交叉算法公式为:

式中,m和n分别表示参与交叉的旧个体,z表示交叉产生的新个体,P表示交叉概率因子。
变异算法公式为:

式中,k表示变异前参数,k′表示变异后的新参数,q表示变异概率因子。
步骤4:判断进化代数是否达到了设定的最大迭代数量,或者参数是否收敛至要求精度。若已达到最大迭代数量或完成收敛,则结束迭代,获取一组全局最优控制参数kp、ki、kd,否则重新进行步骤3 操作,直到完成遗传算法的迭代。
3 仿真结果
为验证该温度智能控制系统的控制效果,利用Simulink 仿真软件对控制对象进行仿真测试。设定温箱为一阶惯性环节,其传递函数为:

系统控制运算周期设定为1 ms,进行阶跃指令响应测试。阶跃指令设定为典型温度,即yd=10 ℃,利用遗传算法对PID 参数进行整定,样本数量选为30,控制参数的设定范围:kp∈[0,10],ki∈[0,1],kd∈[0,10],经过50 代的进化,最终获得一组最优控制参数:kp=5.36,ki=0.12,kd=1.43。基于遗传算法的智能控制算法与经典PID 控制算法的控制仿真结果如图6所示,由图中可以看出,与经典PID 控制算法相比较,改进算法的阶跃响应无超调,且响应过渡时间仅为经典PID 控制算法的36.5%,改进算法具有更快的响应速度和更低的超调量。

图6 两种控制算法仿真结果
图7 为适应度函数值变化曲线,通过进化迭代过程,适应度函数值迅速下降,20 s 左右实现了收敛,适应度函数值最终收敛至30.62。适应度函数值越小,表明控制参数具有更优的控制效果。适应度函数值变化曲线表明该改进算法能够实现控制参数的快速收敛,验证了最优值解搜索的快速性。
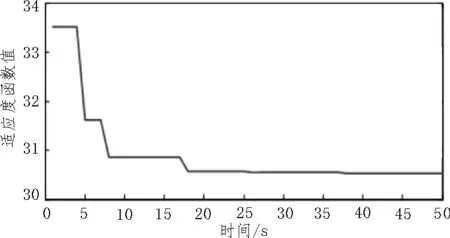
图7 适应度函数值变化曲线
4 结论
为了实现温箱的温度数字化智能控制,选取ARM 微处理器作为运算处理器,实现控制系统的数字化智能运算,并选用Pt100 热电阻作为温度敏感元件,配合多种信号处理方法,实现温度的高精度检测。另外,将遗传算法与经典PID 算法相结合,提出一种改进型PID 控制算法,实现控制器参数的自适应最优求解,利用遗传算法搜索最优解,通过多次的迭代求解,最终实现控制参数的最优配置和自适应调整。仿真实验表明,利用基于遗传算法的改进型控制算法,温度控制系统具有更优的控制精度和响应速度。
猜你喜欢
飞控与探测(2022年6期)2022-03-20 02:16:14
航空维修与工程(2021年4期)2021-08-31 02:24:18
防爆电机(2020年4期)2020-12-14 03:11:04
力学学报(2020年4期)2020-08-11 02:32:12
中国人民公安大学学报(自然科学版)(2018年2期)2018-10-15 08:08:36
中国人民公安大学学报(自然科学版)(2017年4期)2018-01-09 05:41:09
传感器世界(2017年6期)2017-11-21 03:03:56
黑龙江电力(2017年1期)2017-05-17 04:25:08
护理实践与研究(2015年9期)2015-03-20 09:00:08
河南科技(2014年11期)2014-02-27 14:17:10
