
航天制造中机械臂的发展与展望
2022-12-01 09:07吕舒婷梁高强靳向涛尹兆洁
南方农机 2022年23期
吕舒婷 , 李 淳 , 周 贺 , 吴 盟 , 李 强 , 梁高强 , 靳向涛 , 尹兆洁
(首都航天机械有限公司,北京 100071)
0 引言
航天制造工业是一个大国最高精尖的制造技术的体现,是一个国家探索太空领域的技术与产能的基石。20世纪70年代,中国航天制造业开始迅速发展,随着科研的投入不断增加,到21世纪后,各项航天技术壁垒不断被突破,中国航天制造技术走向了新的高度。
在航天制造领域,航天器的装配生产始终是检验航天器设计优劣的重要一环。设计公差是否合理,尺寸链是否闭合等问题会在航天器装配环节全部暴露出来。随着航天技术的不断发展,航天器的设计外形越来越复杂,装配的空间越来越狭小,给后期的装配环节带来了很大的难度与考验。为保障航天生产中装配生产的厚墙不倒,各类航天制造厂开始引入机械臂来辅助进行装配生产。
随着机器人技术的不断发展,各类机械臂推陈出新。高负载自重比、操作更加灵活、稳定性和安全性更强的机械臂被研发出来[1-2],为其在航天制造中的应用提供了可能。
1 机械臂的发展概述
机械臂是仿照人的上臂关节进行设计与制造的,有着结构紧凑、体积较小、相对工作空间大、可越障等特点。机械臂有6个主动关节来保障其具有6个空间自由度,能最大限度地进行灵活工作。一般情况下,机械臂的关节均为转动型关节,其中,3个关节一般集中在“手腕”部,该设计方案可充分压缩机械臂整体的体积[3]。
生产生活中常见的机械臂结构与原理存在一定的相似性,机械臂的主体结构为多关节结构,其运行由多个回转部件、关节、支撑臂部件、可伸缩部件、抓手等组成,大部分机械臂工作过程类似于费力杠杆的工作过程。大部分机械臂包括以下机械结构:一是主体回转机构,位于机械臂的最下方位置,由伺服电机、回转支撑、蜗轮蜗杆、回转轴等零部件组成,能够实现水平方向的自由转动;二是关节轴承,能够实现两个相连接支撑臂的空间转动,包括俯仰摆动等;三是可伸缩气缸液压油缸或电缸,能实现手臂沿特定方向的伸缩功能;四是抓手结构,包括夹取、抓取、吸取等多种方式,所使用的驱动力和技术形式也多种多样[4-5]。
1.1 国外机械臂的发展现状
国外机械臂的发展时间较早,从20世纪40年代到目前为止已经有80多年的历史了。生活因为机械臂的出现而变得多彩,现在可以通过一款机械臂来帮助人们完成任务,而不必自己动手。国外的机械臂研究现状可以从以下两种机械臂的概况来简单介绍。
1.1.1 空间机械臂
空间机械臂是一个空间机电系统,这个系统由机电热控共同组成,随着空间技术(特别是航天飞机、空间站、空间机器人等)的飞速发展,空间机械臂在太空中的应用越来越广泛。空间机械臂主要有两大类:舱外机械臂、舱内机械臂。前者针对不同的工作任务需求,其自由度通常为5~10个,长度通常是几米至十几米,主要安装载体是空间站、航天飞机以及小型飞行器。它的主要任务有运送目标、辅助进行对接、摄影、在轨建设、抓捕或者释放卫星等,此外它还可以作为辅助设备,帮助航天员进行出舱活动。而后者具有尺寸小、运动范围小等特点,它的主要任务是更换设备部件、装配设备以及打捞空间漂浮物等。
德国宇航中心在20世纪90年代研制并成功发射了小型空间机械臂系统ROTEX。这种系统安装了各种类型的执行机构和传感机构,拥有8个自由度,能够精准地完成1 m范围内预设的操作。
1.1.2 关节型机械臂
Segway公司已经研制出了一种家用轻型机器人RMP200,能够在相对较小的室内进行移动。日本也在20世纪80年代对农业采摘机械臂进行了研究。1984年,日本Kyoto大学研制出了一个5自由度的关节型机械臂。1993年,Kondo等研制出了带有机械手、视觉传感器的7自由度机械臂,在农业机械方面作出了很大的贡献,也为其他制造生产行业提供了参考。
1.2 国内机械臂的发展现状
国内机械臂的发展较晚,但是发展速度非常快。近年来,随着《中国制造2025》《中华人民共和国国民经济和社会发展第十三个五年规划纲要》《机器人产业发展规划(2016—2020年)》等相关政策的大力支持,国内的机械臂技术水平与应用能力有了显著的提升,在各类生产线上有着广泛的应用。与传统的机械臂相比,我国自主研发的机械臂有着成本低、重量轻、占地面积小等优点[6-7]。
越疆科技刘培超及其团队对机械臂内部嵌套的系统进行了优化,使得PC端的鼠标、手机、App、脑电波控制、语音控制可对机械臂进行控制,让机械臂的使用更加人性化。除此之外,该团队设计的系统控制精度更高,可使机械臂写毛笔字、切香肠、画画等。
近年来,我国的空间机械臂发展十分迅速。在国家“863计划”的大力支持下,哈尔滨工业大学研制出了6个旋转关节的试验七号空间机械臂,6个旋转关节分别为旋转、俯仰、俯仰、旋转、俯仰、旋转功能,样机如图1所示[8]。之后,哈尔滨工业大学与其他单位联合对天宫二号空间机械臂的在轨维修技术进行了论证与研制,并最终取得了神舟十一号飞船与天宫二号实验室组合的圆满成功[9-10]。

图1 试验七号机械臂样机
2 一种新型的机械臂技术
机械臂根据协同工作方式分为单机械臂和双机械臂。单机械臂机器人已在我国航天制造业中广泛应用,如冲压、铸造、焊接、装配等。但是在遇到复杂且装配精度要求更高的制造场合时,单机械臂在工作中会受到很大的限制。因此,双机械臂技术应运而生[11]。
双机械臂技术是一种新型的机械臂技术,起步较晚,但是发展前景较好,一直是一个热门研究内容,受到国内外学者的广泛关注。对于双机械臂,机械问题不是太过于重要,控制响应方面才是该机械臂的重点。在对双机械臂进行控制设计前,需对机械臂空间的运动学以及协同空间进行分析,并进行正逆求解,所以双机械臂的设计归根到底是一个数学问题。对双机械臂的空间协同分析内容如下。
2.1 建立本体坐标系
根据北京理工大学王梦的求解方式,即后置坐标系建立方法[12],以两个3轴机械臂构成的双机械臂为例,建立11个双机械臂的空间连杆坐标系,分别为:建立坐标系的示意图如图2所示,该坐标系命名为D-H坐标系。
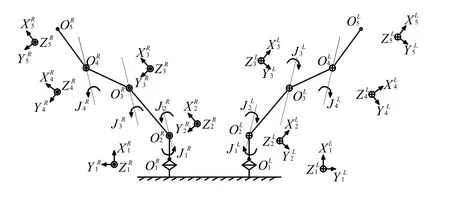
图2 D-H坐标系示意图
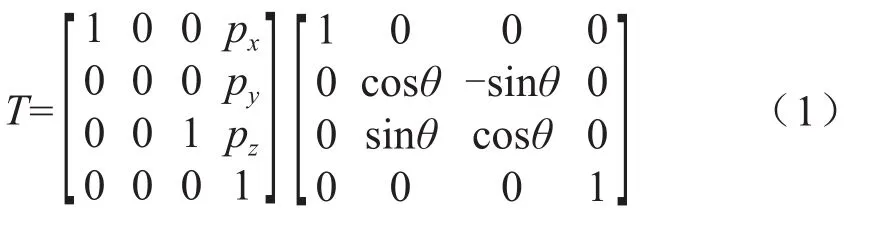
之后根据D-H矩阵公式来计算,求解机械臂末端在运动情况下的位姿公式,如公式(1)所示。D-H矩阵公式是Denavit与Hartenberg提出的一种4×4矩阵公式,用来描述机械臂各个连杆的空间关系,并推导出机械臂末端位姿状态。
2.2 进行协同空间分析
双机械臂可看作是两个单机械臂的协调工作,工作空间包含单机械臂的工作空间和双机械臂的协调工作空间两种。通过蒙特卡洛法[13]进行计算,进行协同空间分析,求解方法如下:
1)建立单机械臂末端作用点在基坐标系中的位置向量表达式。
2)利用随机函数进行随机点的设定,得到机械臂的关节变量伪随机值。
3)将N个关节变量代入两个机械臂末端点,求解末端点的坐标集合。
4)结合末端点的坐标集合,构建两个机械臂空间的协同运动算法。
3 总结
随着国内航天制造业的快速发展,对航天器配套产品的需求量越来越大,机器代替人工来进行高效工作的趋势越来越明显。高效、稳定的机械臂将会是航天制造业中不可或缺的一类机械,而双机械臂的出现为更加高效、精准的生产提供了一个新的发展方向,未来的航天制造业必将发展得更为迅速。
猜你喜欢
儿童时代(2022年4期)2022-04-19
导航定位学报(2022年2期)2022-04-11
军事文摘(2021年22期)2022-01-18
当代工人(2020年8期)2020-05-25
学苑创造·A版(2019年8期)2019-08-15
数学大世界(2018年1期)2018-04-12
考试周刊(2018年15期)2018-01-21
小溪流(画刊)(2017年12期)2018-01-10
中学生数理化·七年级数学人教版(2017年4期)2017-07-08
儿童故事画报·发现号趣味百科(2015年12期)2016-01-25
