
一种胡柚高枝剪的设计与研究*
2022-12-01 09:07:12栾雨杰何勤杰陈翔飞
南方农机 2022年23期
栾雨杰 , 何勤杰 , 朱 峻 , 陈翔飞
(衢州职业技术学院机电工程学院,浙江 衢州 324000)
0 引言
目前,胡柚主要依靠人工采摘,由于胡柚树树体高大,果农在采摘过程中需要爬上树或者借助梯子登高,使得人工采摘工作具有一定的危险性,且反复上下梯也降低采摘的效率,人工成本非常高。采摘是胡柚生产中费时费力的环节,在胡柚采摘期间的劳动力投入约占整个生产环节的50%~70%。针对上述问题,自动或者半自动采摘器[1-2]能够提高水果采摘的工作效率,节省人工成本,提高果农的经济效益。然而,我国胡柚种植大多位于丘陵山区,属于坡地,因此合适的全自动大型采摘机械很少[3],且由于成本高,操作复杂,维修保养费用高等,导致现有的大中型采摘机在胡柚种植区域难以适用。为此,国内很多学者对小型水果采摘器做了大量的研究与试验。左斌等[4]为解决高枝水果采摘器难的问题,设计出一种多自由度定位机构的高枝水果采摘器,试验结果表明该采摘器的采摘效率高,平均每个水果采摘时间为6 s。吴先焕等[5]通过分析果农采摘水果的现状,研制了半自动可调式水果采摘器,该采摘器降低了果农的劳动强度和成本,可应用在大规模的水果采摘中。蔡华春等[6]为解决水果采摘器价格高和便携性差问题,基于气动原理设计了一种可叠式水果采摘器,利用自锁折叠机构提升了采摘器的便捷性。黄世刚等[7]为解决采摘器效率低等问题,利用电机的正反转提升了采摘器的专项功能,提高了采摘效率。
因此,以胡柚采摘的实际工作为需求,为了更好地提升采摘器的实际应用性,本文设计了一种握力式胡柚高枝剪,使得果农在地面上就可以轻松采摘到胡柚树顶附近的胡柚,且后期保养、维修方便,劳动强度较低,果园采摘人员在简单熟悉产品使用流程后,即可完成胡柚的采摘工作。本文所设计的高枝剪对所采摘的单果高度、大小限制少,适用范围很广,成本低,特别适用小型采摘园和个体农户的使用。
1 高枝剪设计方向与整体结构
1.1 设计方向
本文所设计的胡柚高枝剪首先是解决果农无法站在地面上就能采摘胡柚的难题;其次是要求高枝剪结构简单,操作方便,便于果农携带,方便果农在丘陵山区使用;最后是可以实现类似人工采摘的过程,将胡柚结蒂剪断的同时,不伤害胡柚表面,保证采摘器不对胡柚造成损伤。
1.2 整体结构
高枝剪主要由手握手柄、高度调节装置、传动机构、收集网以及剪刀等组成,如图1所示。其中传动机构安装在高度调节伸缩杆内部,连接剪刀与手柄,主要是依靠手握力剪断胡柚的枝条;高枝剪的主要作业目的是剪断枝条,所以剪刀设计较为关键,在剪刀处设计类齿条夹持装置,可以在剪枝时,夹住枝条;伸缩杆则是实现高枝剪的关键部件[5],本文设计的伸缩杆主要由2节组成,根据胡柚树的高低,实现不同高度的作业。
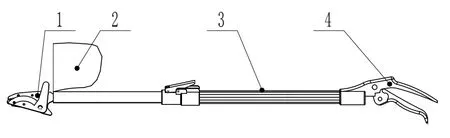
图1 高枝剪整体结构
2 主要功能部件的设计与工作原理
2.1 剪刀部件机构
高枝剪剪刀部件的结构如图2所示,主要由刀片和带有锯齿状的夹持件组成,刀片为一动一静,且两片刀片上分别有一个带有锯齿状的夹持件,在剪断枝条的同时可以夹住剪下来的枝条。握动手柄可以控制刀片的开合,静刀片则与伸缩杆在一条直线上保持不动,刀刃形状不是直线,而是圆滑的弧线[8],且刃口单面呈楔形,能够实现滑切。因为滑切要比砍切省力,所以这种刀刃可以更方便操作。
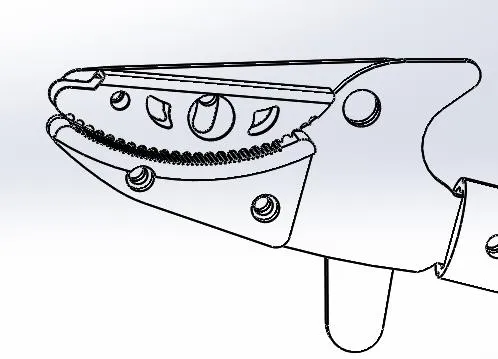
图2 剪刀部件
25~49岁的普通成年人的单手握力约为32.6 kg~57.7 kg,取平均值48.0 kg计算,重力加速度g=9.8 N/kg,则握力为:

胡柚果柄直径统计分析表明,果柄直径范围大多为1.8 mm~5.4 mm,取最大直径5.4 mm计算剪断果柄所需要的最大剪切应力。根据传动机构的杠杆原理要实现力的转化[9],在手柄处,施力臂与阻力臂的比值约为4。
因此普通成年人单手操作能够产生的平均剪切应力为:

计算结果大于胡柚枝的最大抗剪强度3.7 N/mm2。
2.2 高度调节装置
胡柚树的高度一般不超过5 m,采摘时采摘人员一般都是站立采摘,所以当采摘杆达到3.5 m左右时,一般人均采摘得到。如图3所示,在高枝剪上设计了高度调节机构,由一级套杆、二级伸缩杆以及滑套锁紧机构组成。如图4所示,滑套锁紧机构由滑套和杠杆锁紧机构组成,在按钮下方设计了滑套锁紧机构,二级伸缩杆上分布的四个限位孔在经过滑套锁紧机构时,由于杠杆锁紧机构作用,限位孔依次被锁死,伸缩杆可按需改变长度。

图3 高度调节装置
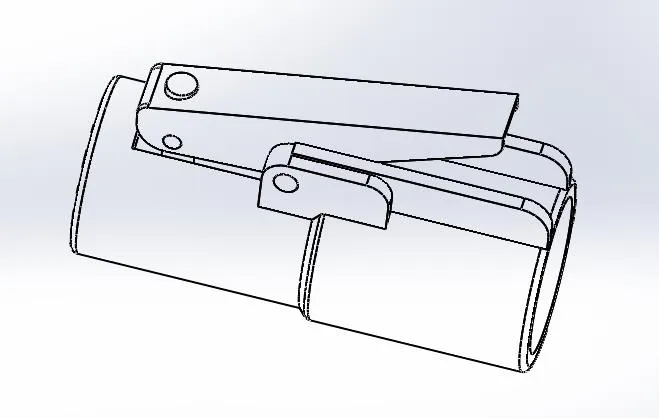
图4 滑套锁紧机构
为保证高枝剪剪切的精度以及稳定性,高度调节机构的弯曲变形量不能过大[10]。胡柚重量相对于高枝剪自身重量而言很小[11],因此,高枝剪几乎只受自身重力影响,即当高度调节机构水平放置时弯曲变形量最大,如图5所示。
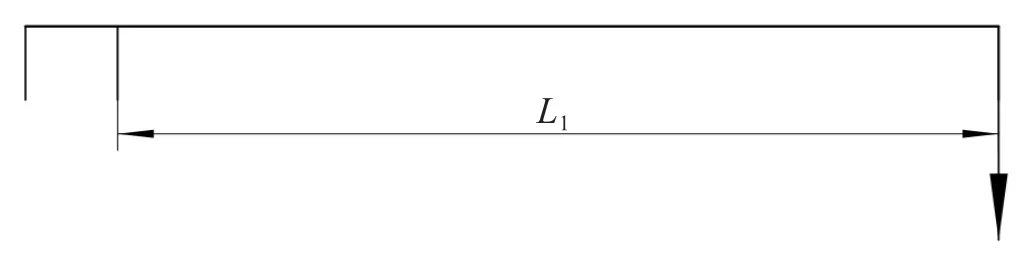
图5 高度调节机构弯曲变形示意图
弯曲应力为:
式中,σ为弯曲应力;L为弯矩;W为抗弯模量。
弯矩:

抗弯模量:

综上可得,σ=175 MPa,远远小于 铝合金(6061)的弯曲极限强度228 MPa。
2.3 手柄机构
手柄用于果农控制高枝剪的采摘工作,需具备一定的强度和便捷性。为此,基于人机工程学,采用高强度的塑性材料制作而成。如图6所示,巧妙利用杠杆原理,保证果农在剪一些较为粗大的胡柚枝时,无需费很大的力便能轻松完成剪枝任务。而且在手柄上设计复位弹簧,剪枝完成后保证手柄复位,为下次剪枝做准备。
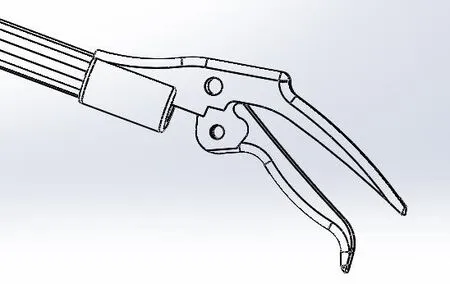
图6 手柄
3 使用效果分析
1)本文设计的高枝剪在采摘胡柚时可通过夹持装置将胡柚枝先夹住,然后利用剪刀切断胡柚枝,被采摘的胡柚直接掉入收集装置中,在提高采摘效率的同时,一定程度上保证了胡柚采摘的完好率。
2)高度调节装置可以改变高枝剪的伸缩长度,实现了果农在地面上进行不同高度的胡柚采摘工作,降低了采摘的劳动强度。
3)本文设计的高枝剪结构设计简单、操作灵活方便,并易于携带。
4 结论
本文通过研究胡柚采摘的工作特性,以其实际需求为基础,设计了一种胡柚采摘高枝剪,可根据果树的高度调节高枝剪的高度,而且采摘后的胡柚可以直接进入收集袋,该高枝剪能够满足胡柚的采摘要求,操作简单,不受地域的限制,适应性强,有效提高了胡柚的采摘效率。而且该高枝剪在今后将与行走机器人或者机器视觉装置进行融合,实现全自动的胡柚采摘,使其更好地为果农服务。
猜你喜欢
青年文学家(2023年27期)2023-11-23 00:45:50
装备制造技术(2020年11期)2021-01-26 00:39:30
作文小学中年级(2020年5期)2020-12-29 07:05:37
作文·小学低年级(2020年5期)2020-10-09 11:28:14
东坡赤壁诗词(2020年3期)2020-07-04 02:50:05
电子制作(2018年11期)2018-08-04 03:25:44
绿色中国(2018年24期)2018-05-20 02:33:36
绿色中国(2018年24期)2018-05-20 02:33:36
浙江柑橘(2016年4期)2016-03-11 20:12:57
科普童话·百科探秘(2015年5期)2015-05-26 07:10:33
