
船载磁探测器在四个主航向上的三分量抗干扰技术研究∗
2022-12-01 03:40李志新
舰船电子工程 2022年3期
李志新
(海军工程大学电气工程学院 武汉 430033)
1 引言
船用磁探测器,安装在船舶桅杆上,由3个相互垂直放置的磁通门磁传感器组成,分别测量船舶坐标系下地磁场的3个分量,控制相应线圈的电流[1],以补偿船舶感应磁场,如图1所示。

图1 船用磁探测器
理想情况下,磁探测器测量船舶坐标系下地磁场的3个分量,实际上,钢铁材料建成的船舶有固定磁场、感应磁场,通电线圈也会产生磁场,这些磁场都会被磁探测器测量到,成为干扰磁场信号,排除这些干扰磁场,才能保证测量磁场的准确性,进而保证线圈电流的准确性,使其满足设计要求[1]。
受技术设备水平的制约,以往的磁场信号采集处理设备无法实时获取船舶航向、纵倾、横倾信息,故以往的船用磁探测器抗干扰调整,只能根据船舶在磁东、南、西、北四个主航向上时测得的磁场值做水平抗干扰调整,对垂向干扰无可奈何。现在的磁场信号采集处理设备可十分便捷地实时获取船舶的经度、纬度、航向、纵倾、横倾等信息,为船用磁探测器的三分量抗干扰提供了基础[2~4]。
2 磁探测器测量信号组成
安装在船舶桅杆上的磁探测器测量到的磁场包括地磁场、船舶感应磁场、线圈磁场、船舶固定磁场,如式(1)所示:
对于地磁场,磁探测器的三个磁传感器不能保证完全正交,磁探测器的安装也会存在一定误差,故探头坐标系下的地磁场B地与船舶坐标系下的地磁场B存在一定的角度偏差,若航向方向偏差为Δα,纵摇方向偏差为Δβ,横摇方向偏差无Δγ,则
实船角度偏差一般不大于 ±1°,所以 Δα、Δβ、Δγ是很小的角度,当Δα、Δβ、Δγ均以弧度表示时,上式可近似为
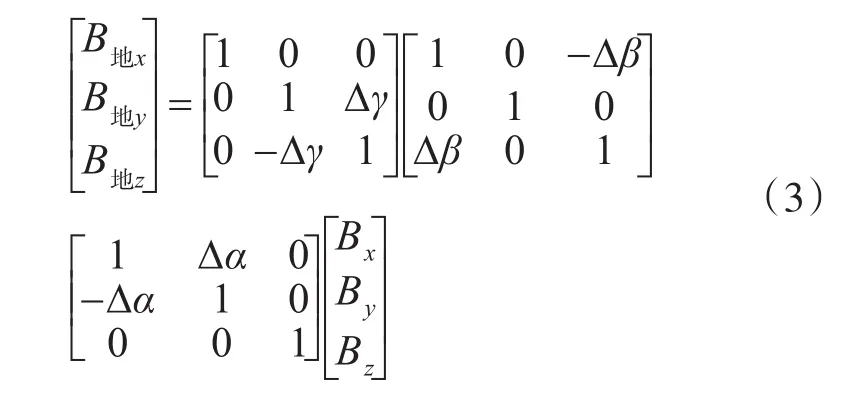
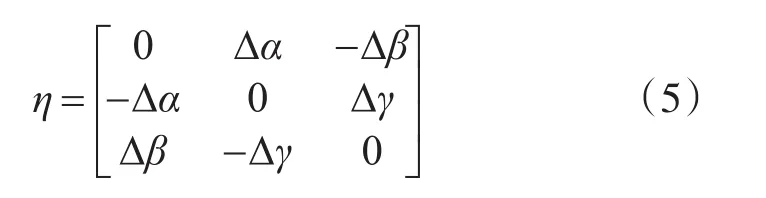
略去二阶以上小项[5~7]:

即安装误差带来的误差系数为
对于船舶感应磁场,船舶坐标系下磁探测器位置的感应磁场为

其中k为感应磁场干扰系数,根据式(4)可得探头坐标系下感应磁场:

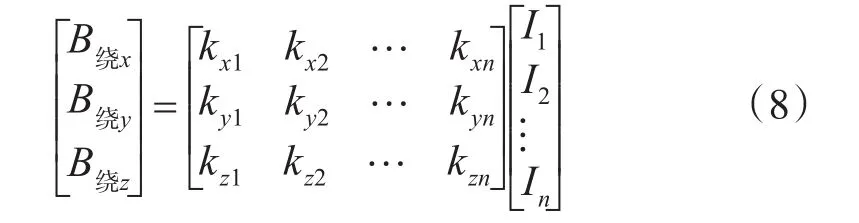
对于线圈磁场,如式(8)所示,其中 kxi、kyi、kzi(i=1 2 … n,n为线圈数)为线圈干扰系数,Ii为各线圈电流。
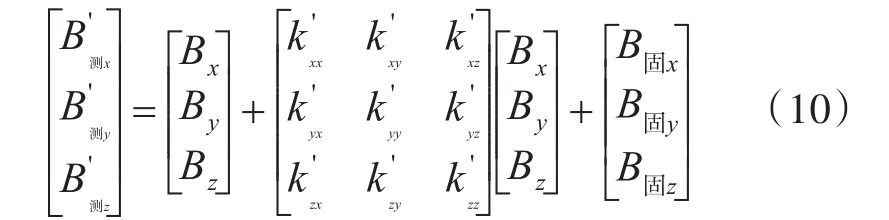
加上在一定时期内视为不变的固定磁场[8],磁探测器接收到的磁场信号为
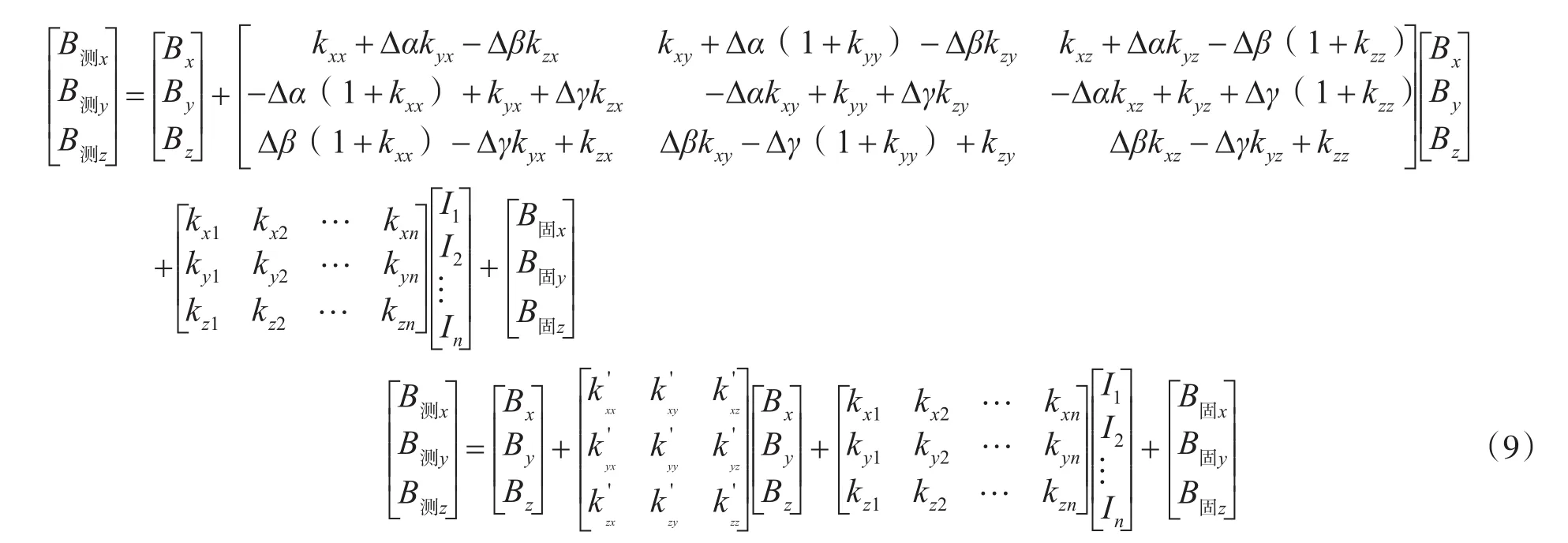
磁传感器和磁探测器的安装带来的误差与感应磁场干扰有相同的形式,在式(9)二者合为一体。等式右边,除第一项外,均为干扰磁场,其中,线圈干扰系数可通过依次给线圈通电的方式获取,即依次给各线圈通电,同时记录通电前后磁探测器测得的磁场值的差值,从而计算出线圈干扰系数,进而根据线圈电流求出线圈磁场干扰量,排除线圈干扰磁场之后的磁探测器测量磁场为
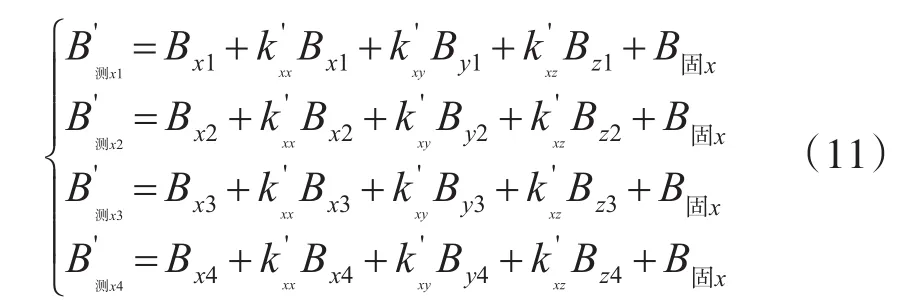
磁探测器在磁东、南、西、北四个主航向上各采1组数据,得到4组数据,以X分量为例:
在船舶抗干扰地点的4个航向上Bx、By的值不同,获取也比较容易,而要改变Bz则比较困难,若将Bz不变,则有

可见,不满足唯一解条件,这也是以往只能进行水平抗干扰的原因所在。
3 四航向三分量抗干扰方法
充分利用现在磁场数据采集设备的长处,采集磁场的同时,实时采集船舶的航向、纵摇、横摇等姿态信息,则可得到船舶不同状态下的不同Bz值,如此式(12)将有唯一解,可实现三分量抗干扰。
若船舶抗干扰地点地球坐标系下地磁场为BE,且α为磁航向角,β为纵摇角,γ为横摇角,则BEx=HD、BEy=0、BEz=ZD,舰船坐标系下地磁场为

四个航向上的航向、纵摇、横摇值为,磁北航向N,Δα1、Δβ1、Δγ1;磁南航向S,180°+ Δα2、Δβ2、Δγ2;磁东航向E,90°+ Δα3、Δβ3、Δγ3;磁西航向W,270°+Δα4、Δβ4、Δγ4,其中 Δα 为船舶与主航向的偏差,Δβ纵摇角、Δγ横摇角。X分量测量得到的磁场为
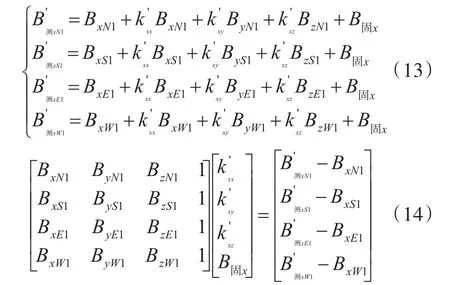
四个航向上的 Δα、Δβ、Δγ各不相同,式(14)中的4个Bz值各不相同,所以式(14)有唯一解,可求出干扰系数和固定干扰磁场,实现抗干扰调整。
4 三分量干扰系数及固定磁场简化计算方法
根据式(14)可直接求出干扰系数和固定磁场,但在实际抗干扰中,由于干扰、测量误差及船舶姿态等原因,用直接求逆的方法求解式(14)得到的值常与实际值偏差较大,甚至无解。采用迭代法求取干扰系数和固定磁场,如图2所示,可简化计算,减小数据间的耦合,避免上述情况的发生,也可在一定程度上减少计算量,降低对船舶磁场测量设备的软硬件要求[9~10]。
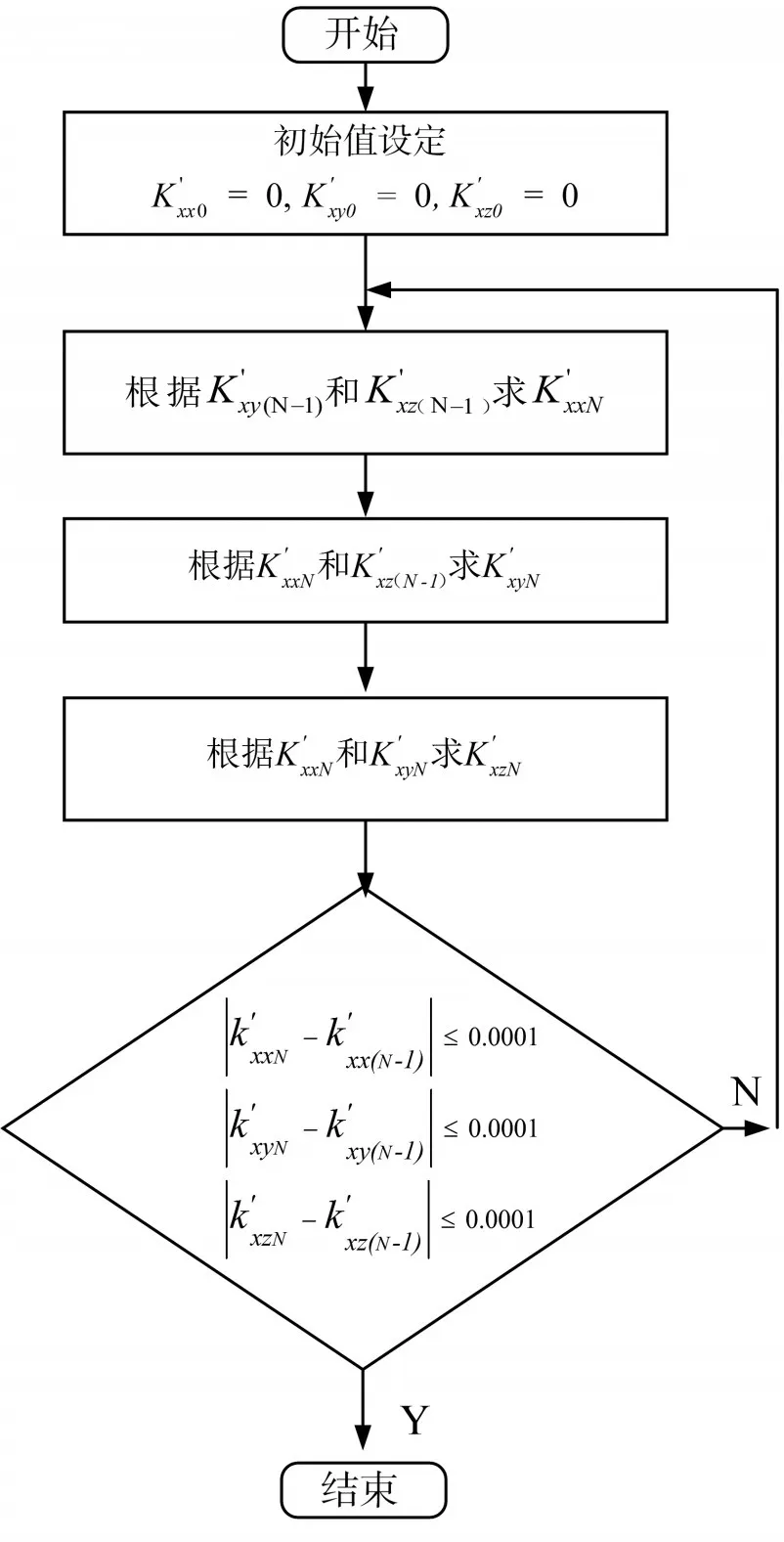
图2 干扰系数求解示意图

通过第1)、第2)步求得了水平感应磁场引起的干扰的系数,接下来需求垂直磁场引起的干扰的系数,这就需要改变作用在船舶上的垂向地磁场,需要较为明显的纵摇、横摇。一般情况下,纵摇、横摇的角度比较小,在小角度的时候,余弦函数的变化率小,正弦函数的变化率大,所以在磁南北航向纵摇或在磁东西航向横摇,能使作用在船舶垂向的地磁场变化较大,从而有利于求取干扰系数。船舶实现横摇比实现纵摇容易,故选取一组磁东航向的横摇数据,取船舶磁航向角为90°+Δα5,纵摇角为 Δβ5,Δα5、Δβ5均为较小角,横摇角Δγ5稍大。

5 三分量抗干扰仿真
假设某船舶磁探测器感应干扰系数:

固定干扰磁场(单位为nT):
船舶有补偿感应磁场的Ix、Iy、Iz线圈和补偿固定磁场的IxG、IyG、IzG线圈,共6组线圈,其中固定磁场补偿线圈电流(单位为A)为
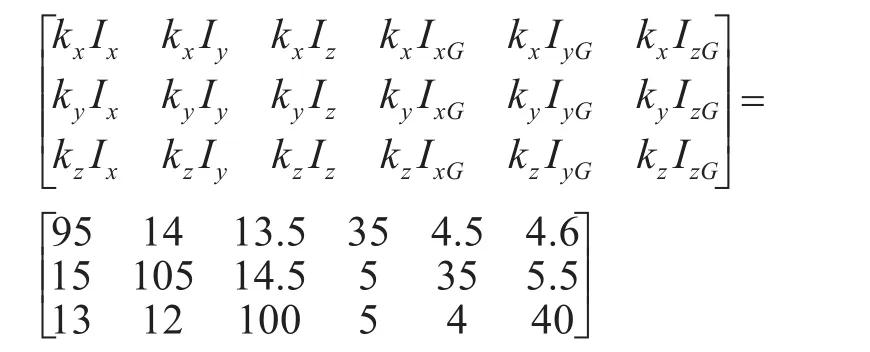
线圈对磁传感器的干扰系数为
若不进行抗干扰调整,线圈电流如图3所示,图中两个“•”画线圆所围区域,表示Ix-Iy允许值,两条“•”画直线所限区域为Iz允许值,“+”画线为未抗干扰时的Ix-Iy值,“*”画线为未抗干扰时的Iz值。可见若不进行抗干扰,将导致磁探测器测量到的磁场信号严重失真,船舶线圈中的电流将严重偏离设计电流。
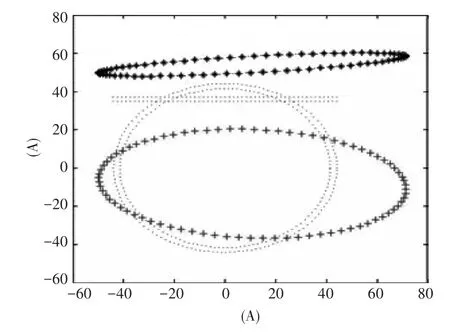
图3 不进行抗干扰调整时的线圈电流
排除了线圈干扰磁场之后,线圈电流如图4所示,与图3对比可见,线圈电流有了一定的改善,与允许值接近了一些,但偏差还是很大,不满足设计要求。
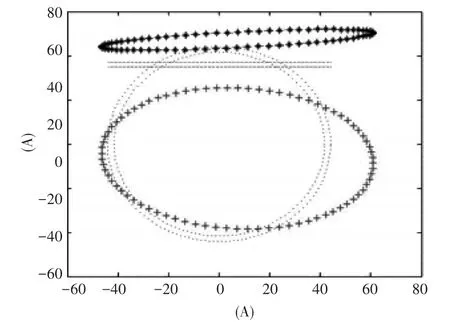
图4 排除线圈干扰磁场后的线圈电流
取磁探测器测量误差为5nT,横摇角Δγ5为3°,按图2所示步骤进行三分量抗干扰调整后的线圈电流如图5所示,Ix、Iy、Iz三个感应线圈电流均在允许范围之内,最大误差0.0304A,是线圈最大电流50A的0.06%,与理想电流十分接近。此时求得的干扰系数:
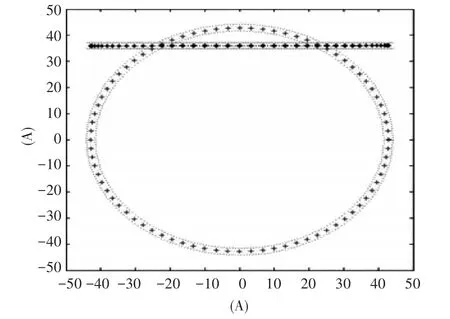
图5 三分量抗干扰调整后的线圈电流
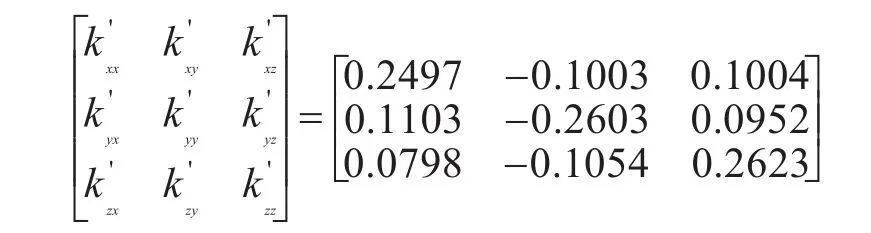
与设定值的最大差值为0.0077,在全球范围内会带来最大524nT的计算误差。求得的固定干扰磁场值为
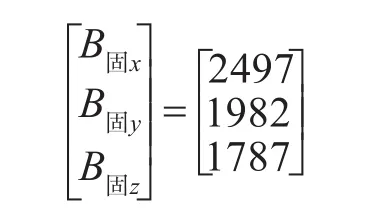
与设定值的最大差值为289nT。即干扰系数和固定干扰磁场误差将导致的最大磁场计算误差为813nT,将导致线圈电流的最大误差为1.2%,满足3%的抗干扰要求。
6 结语
理论分析和仿真表明,在采集磁探测器磁场数据的同时,实时采集船舶的航向、纵摇、横摇等信息,可对船舶上的磁探测器进行三分量抗干扰调整。进行抗干扰调整时,一定的纵倾或横倾角是必须的,其幅值的大小,与磁探测器的测量精度以及计算方法共同决定了抗干扰跳调整的精度。本文取磁探测器测量误差5nT,远大于当前船用磁探测器误差水平[11],3°的横摇角也很容易实现[12],故本文研究的技术及算法是可行的。
猜你喜欢
大电机技术(2022年4期)2022-08-30
舰船科学技术(2022年11期)2022-07-15
舰船科学技术(2022年10期)2022-06-17
防爆电机(2022年1期)2022-02-16
读者·校园版(2020年19期)2020-09-16
当代陕西(2019年19期)2019-11-23
智族GQ(2019年9期)2019-10-28
民用飞机设计与研究(2019年4期)2019-05-21
英美文学研究论丛(2018年1期)2018-08-16
北京航空航天大学学报(2017年2期)2017-11-24
