
机载LiDAR测量系统在“房地一体”农村不动产权籍调查中的应用
2022-11-29 09:19:26谢秀媛
资源导刊(信息化测绘) 2022年9期
谢秀媛
(广东泊锐数创空间有限公司,广东 惠州 516006)
1 引言
传统的房地测量方式作业周期长、外业强度大[1]、人员投入密集,工作进展易受外界因素影响,且传统作业模式生产的数据成果为二维形式,难以对三维空间不动产信息进行精细化、准确化、直观化管理。将机载LiDAR 测量系统应用到“房地一体”农村不动产权籍调查项目中,既可以直接基于三维模型采集内业数据,又可使用直观的三维底图开展外业权属调查,能够为“房地一体”农村不动产权籍调查项目提供高效、便捷的作业模式。
2 机载LiDAR 测量系统
2.1 机载LiDAR 测量系统原理
机载LiDAR 测量系统由空中测量平台、激光扫描仪、全景相机(CCD)、卫星/惯性导航系统(GNSS/INS)、同步存储控制系统等组成(如图1 所示),空中测量平台以中低空飞行器为主,常用的有固定翼飞机、无人机和直升机等。机载激光扫描仪与地面三维激光扫描仪相似,其通过高速激光扫描测量的方法,按照激光测距的原理,获取被测物体表面大量密集点云数据和反射率等属性数据和信息[2]。

图1 机载LiDAR测量系统作业示意图
机载LiDAR 测量系统的原理为:系统通过同步控制各个组件获取定位信息,同时进行数据采集,其中,GNSS 系统可以快速获取瞬时位置信息,INS 系统可以获取瞬时的姿态及速度信息,利用GNSS 地面基站、移动GNSS、INS 系统、精密数据处理软件,联合进行POS 解算,可生成高精度的位置及速度信息[3]。机载LiDAR 测量系统通过对地面目标主动发射高频率的激光脉冲,直接获取目标物体表面的距离、坡度、粗糙度和反射率等信息,高精度POS 轨迹结合激光数据可生成带有绝对坐标的激光点云成果[4];同时,CCD 系统获得的影像数据经过POS 处理后,影像带有绝对坐标,将其RGB 属性信息赋值到区域内的激光点云中,即可得到真实色彩的点云数据成果,基于这些数据信息即可快速重建出被测区域内的三维模型及各种图件数据。
2.2 机载LiDAR 测量系统应用优势
机载LiDAR 测量系统作为一种新兴的测绘技术,具有较大的应用优势。
(1)主动式探测,制约因素少
通过主动发射激光脉冲,获取探测目标反射回来的信号,并处理得到地面目标的空间信息,具有不受天气、光照等条件制约的优势。
(2)获取空间信息速度快、效率高,作业安全
通过飞行器的飞行和激光脉冲的扫描完成探测工作,在短时间内获取大区域、大范围的地表空间信息,工作效率较高。利用无人机等飞行器进行探测,可以对危险区域进行作业,作业安全得到保障。
(3)对植被具有一定的穿透作用
机载LiDAR 测量系统发射的激光脉冲信号对植被具有一定的穿透能力[5],可以在一定程度上减少植被遮挡等造成的信息损失,获取真实的地形数据。
(4)精度高
机载LiDAR 测量系统能够快速获取大范围地面物体的空间坐标,且获取的坐标具有较高的精度,在1km 的飞行高度下,获取的点云数据平面精度可以达到0.1 ~0.5m,高程精度能够达到分米级精度。
(5)提供的信息丰富
机载LiDAR 测量系统不仅能够解算地面物体的三维空间坐标,同时可以记录地面目标的强度信息[6],部分LiDAR 系统还能够记录回波次数信息,丰富的信息为LiDAR 数据的使用提供了更多的可能性。
3 工程实例
3.1 工程概况
某“房地一体”农村不动产权籍调查项目需进行不动产权籍调查测绘工作。测区位于惠州市郊某镇,以丘陵地貌为主,地势复杂、植被茂密、交通不便,高程在75 ~105m 之间,面积约14.4km2。考虑到应用常规测量方法难度较大,因此使用无人机载LiDAR 测量系统进行作业。
3.2 数据获取
采用华测P580 无人机平台搭载AS-300HL 多平台激光雷达测量系统,获取目标区域内激光点云及影像数据。AS-300HL 多平台激光雷达测量系统集成了激光扫描系统、定位定姿系统(包括全球定位系统GNSS 和惯性导航仪IMU)、控制单元。系统轻量化设计,重量3.2kg,数据采集速度达10 万点/秒,其设计最大测距250m、测量精度15mm、重复精度为10mm。
参照测区地形地貌及建筑物、植被覆盖等情况,结合机载LiDAR 测量系统的特点,在保证安全飞行的前提下,制定本次任务的飞行路线规划图(如图2 所示)和飞行参数。设计相对起飞点航高为120m、飞行速度为7.5m/s、航向间距60m,共设计30 条水平航带和2条垂直航带。结合空域及天气因素,共飞行两个架次,完成了测区的全部数据采集任务,总飞行用时为4 小时58 分。数据采集完成后,点云数据量为35.66GB,获取影像共5998 张,对数据进行完整性检查,确保采集数据完全覆盖测区、无大面积遗漏。
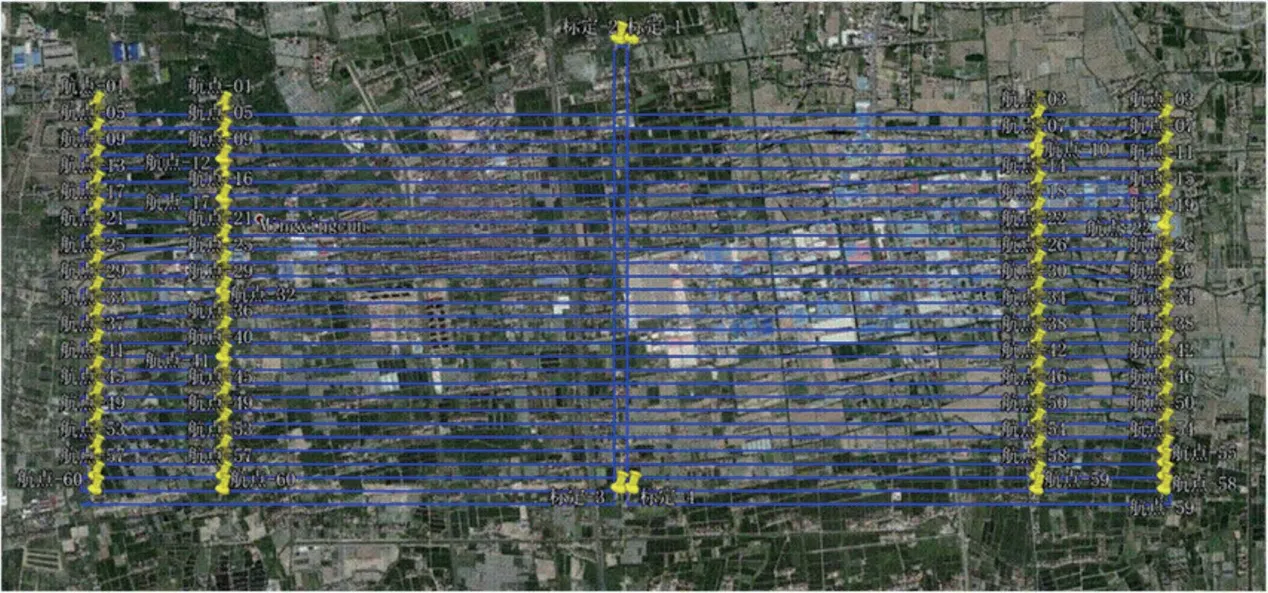
图2 飞行路线规划图
3.3 数据处理
数据处理主要有POS 数据解算、点云数据融合、数据采集、调绘与地籍图编绘四个步骤。
(1)POS 数据解算
运用GPS 差分及惯性定位后处理软件进行PPK 后差分解算POS 数据,POS 解算采用基站数据和移动站GPS 数据和IMU 数据进行组合解算,并输出点云融合阶段需要使用的高精度定位定姿数据。POS 解算操作主要包括基站数据预处理和轨迹解算两部分,将基站原始数据转换为相应格式,然后将移动站的数据与处理之后的基站数据进行组合解算,得到高精度定位定姿数据和航线轨迹,同时导出高精度相机照片的外方位元素。
(2)点云数据融合
将解算后的POS 定位定姿数据与扫描仪原始数据经时间同步后,生成带有绝对坐标的点云数据,融合后的点云数据是后续数据采集测图的基础。图3 为通过解算并且上色融合后得到的点云数据成果,经处理后得到的点云密度约为750 pt/m²。
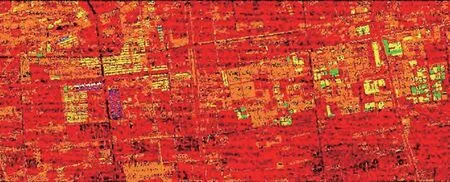
图3 点云数据成果
(3)数据采集
数据采集基于三维立体环境下进行测图,同步加载点云数据、正射影像数据,按照先整体后局部的原则,通过二三维窗口联动进行地物采集。由于机载点云数据密度有限,考虑点云数据不能够准确覆盖所有建筑物角点位置成果,对于建筑物使用打点交会法进行采集,在建筑物底部墙面上以三点确定一条直线,两点连线另外一点作为检核,与临面线相交确定建筑物脚点位置[7]。此方法能精确地按照点云成果进行制图,避免产生较大误差。对于地形和一些线状地物采集,使用DOM 辅助点云数据进行。对于高程数据,在三维模型上通过赋点的方式可获取相应位置的高程坐标值。
(4)调绘与地籍图编绘
点云数据采集完成后获得地籍图初步成果,进行外业综合补测与调绘,调绘前对通过点云采集得到的矢量数据进行检查,使用直观的三维模型底图进行外业权属调查。调绘完成后再进行内业数据编辑,添加属性数据即完成地籍图的编绘整饰工作。图4 为经过外业调绘与内业数据编辑的部分测区1∶1000地籍图。
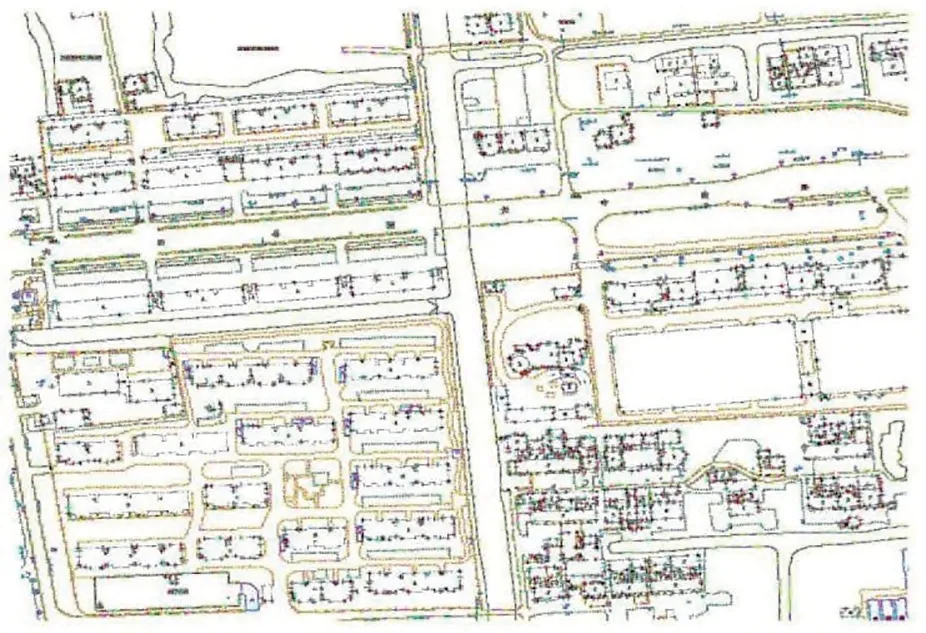
图4 部分测区地籍图
3.4 精度统计
以中误差作为精度指标对机载LiDAR 测量系统采集的点云数据质量进行分析评价,在测区范围内均匀选取一些特征点,如房屋角点、围墙拐点、地面标示线或井盖中心,使用GNSS-RTK 和全站仪采集特征点的平面坐标和高程,将实测的坐标数据与从点云数据中量测的坐标进行比对。本项目共选取100 个特征点进行检测,统计结果如表1 所示。
通过表1 的数据统计得出,利用机载LiDAR 测量系统采集的点云数据的平面中误差为±3.63 cm,高程中误差为±4.49 cm,能够满足《地籍测量规范》(CH 5002-94)中的二级界址点的精度要求。
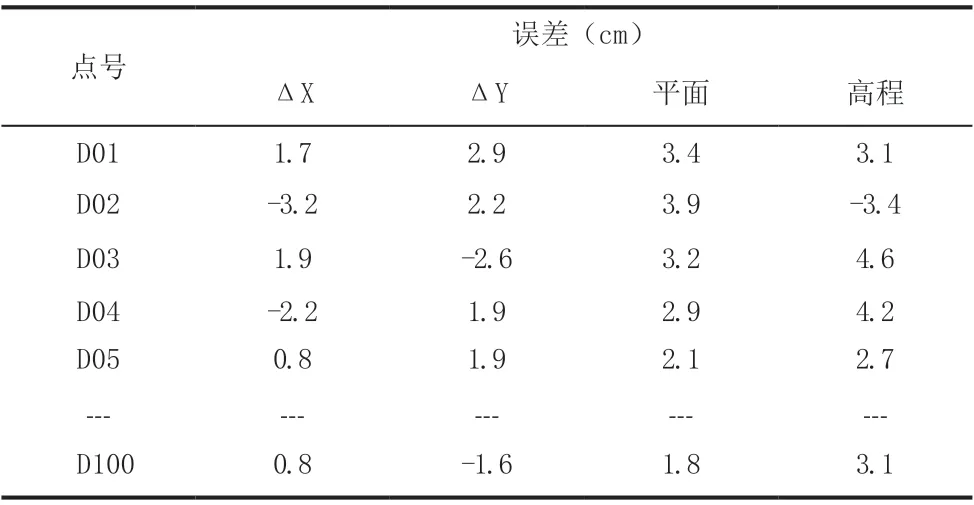
表1 点云数据精度统计
3.5 效率统计
利用机载LiDAR 测量系统完成本次不动产权籍调查测绘工作后,将其与传统测绘方法进行了效率比较,结果如表2 所示。
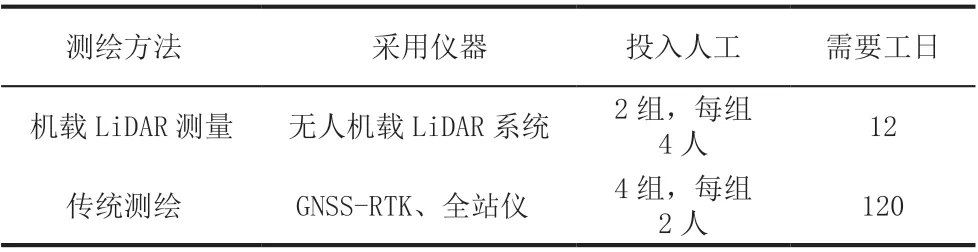
表2 生产效率统计
从表2 可以看出,机载LiDAR 测量系统的生产效率比传统测绘方法提高了10 倍以上,应用效果显著。
4 结束语
基于机载LiDAR 测量系统开展“房地一体”农村不动产权籍调查,有效提高了测绘内外业的工作效率和成图质量,且成果精度完全符合相关规范的要求。随着LiDAR 设备越来越小型化,其搭载的载体将会更加丰富。基于多平台的LiDAR 测量系统都已面世[8],随着新型基础测绘的开展,LiDAR 测量系统将在全要素测绘生产中大展身手,具有广阔的应用前景。
猜你喜欢
山东煤炭科技(2022年6期)2022-07-14 03:10:40
河北地质(2021年4期)2021-03-08 01:59:14
消费导刊(2020年41期)2021-01-27 11:58:51
浙江国土资源(2019年10期)2019-10-31 03:17:00
中国铁道科学(2019年5期)2019-10-19 07:55:14
建材发展导向(2019年10期)2019-08-24 06:25:28
中国房地产业·下旬(2019年1期)2019-06-11 11:32:31
自然资源信息化(2019年6期)2019-03-29 03:29:02
中国房地产业(2019年2期)2019-02-01 04:40:49
测绘通报(2018年10期)2018-11-02 10:07:28
