
自组织网络数据传输最短路径路由算法仿真
2022-11-29 13:24李小玲沈文娟周新卫
计算机仿真 2022年10期
李小玲,沈文娟,周新卫
(南昌大学共青学院,江西 共青城 332020)
1 引言
自组织网络作为移动计算机网络中的一种,具有随意移动特性[1]。在计算机网络中,路由始终处于重要位置。路由不仅能够影响网络的性能还会对自组织网络本身带来安全威胁。所谓的传输最短路径,就是在知晓目标给定源以及目标节点的情况下,找出一条函数值最小的可行性路径。最短路径路由作为组合优化问题,在自组织网络进行低时延传输时依然要对其进行综合考虑,从而降低传输风险[2]。为此,相关学着针对网络数据低时延传输最短路径路由相关问题展开研究。
文献[3]提出基于运动状态感知的容迟网络路由算法。该算法首先利用运动感知对路由进行喷射搜索,并进一步对搜索结果进行阐述;再基于DTN算法对网络中各项参数的性能差异进行计算,获取路由的参数绘图;最后基于VANET环境实现对路由的最短路径计算。该方法由于未能依据容积Kalman滤波对数据低时延传输时的时延进行补偿,导致该算法获取传输最小路径时的网络节点能量消耗高。文献[4]提出基于SDN的卫星网络多QoS目标优化路由算法。该算法首先创建软件卫星网络,并提出多种约束条件构建路由的优化模型;利用拉格朗日松弛算法松弛优化模型;最后采用梯度算法对模型进行迭代计算,通过计算结果获取网络路由的带宽时延,从而实现最短路径的获取。该算法由于在孤立点降维时存在一定偏差,所以该算法的时间开销大。文献[5]提出基于能耗区域感知的无线传感器网络路由算法。该算法首先对网络节点影响进行消除,构造簇头节点候选集;再根据节点集的位置和方向,利用预感知区域理论,构建网络节点评价指标,选择附属簇头;最后通过选择的簇头信息实现数据的低时延传输。该算法由于在获取评价指标时存在一定问题,所以该方法的输出幅值高。
为解决上述数据低时延传输过程中存在的问题,提出自组织网络数据低时延传输最短路径路由算法。
2 时延补偿
2.1 传输信道模型
在获取自组织网络数据低时延传输最短路径前,需优化控制网络中的数据低延迟。
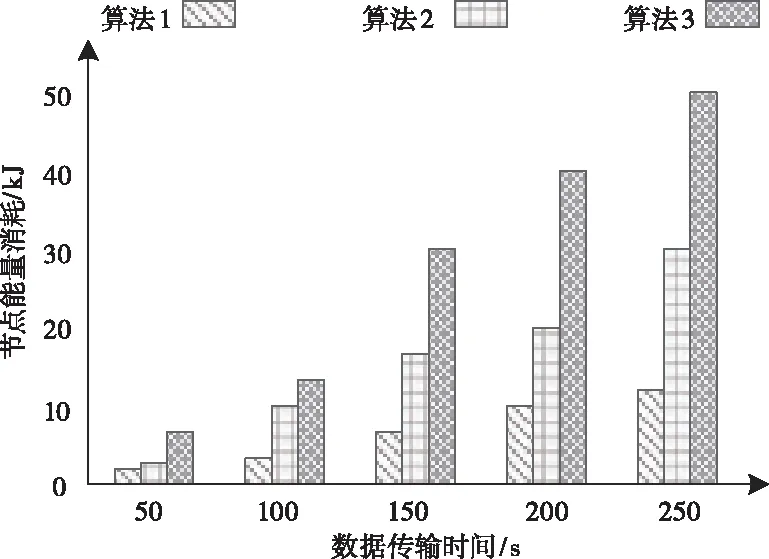
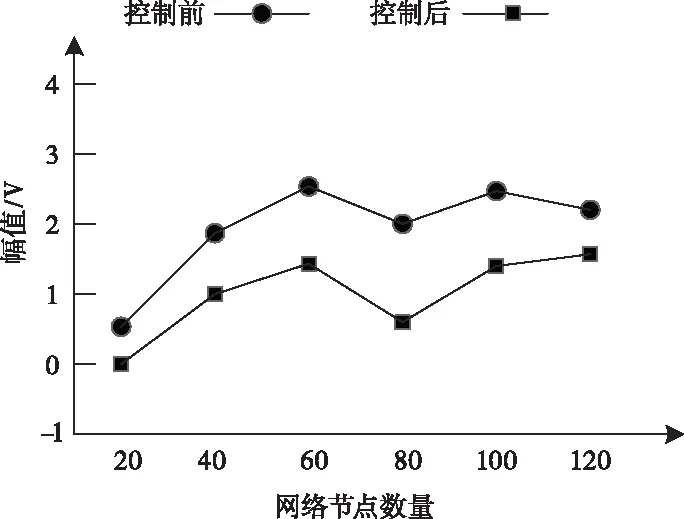
首先构建自组织网络的传输信道模型[6],依据网络中相邻节点的信道宽度,将自组织网络中的节点帧分成各自独立的Nc个码片,依据信道的均衡控制法,创建自组织网络的数据低时延信道模型。当传输过程中延迟时间能够满足cjTc JMDMMA=ρ·E[(|z(k)|2-RMDMMA(k)2)] (1) 式中,网络信道内的衰减系数标记为ρ,网络的最少节点数量标记为RMDMMA(k)形式,自组织网络的覆盖率η的变化特征标记为z(k),网络的节点总量标记为E,JMDMMA为扩展函数。将N个节点随机装置在固定区域内,利用误差生成函数对网络信道进行适当补偿,从而降低数据传输时的误差延迟[7]。 依据自组织网络中节点数据与相邻节点数据之间的关系,对网络传输信道进行补偿。设定网络相邻节点的输出特征为T,利用时滞的补偿控制法,获取自组织网络信道控制的迭代次数,结果如下式所示 (2) 通过上述计算结果,对网络节点的相邻节点集进行计算,获取数据传输时的经过通频带p(t)的带宽,并利用空间调度法对网络信道进行分配[8]。分配结果如下式所示 pri(t)=p(t)*hi(t)+npi(t) (3) 式中,信道的冲击响应特征标记为hi(t),相关性特征标记成p(t),分配条件标记为pri(t),通频带宽为npi(t)。基于上述分配条件,创建网络时空评估模型,对自组织网络内的信道进行优化配置。 基于创建的自组织网络信道模型,利用干扰抑制方法控制数据低时延传输时存在的干扰。设定模型的输出序列为xn,期望响应为dn,网络异常节点的响应特征如下式所示 (4) 式中,异常节点响应特征标记为d(t),节点特征为t,a和c分别为序列数量,gc为干扰系数,网络序列总量标记成n,网络节点传输时延为Tc,网络序列中第a个以及第c个序列标记成an和cn形式。 通过上述获取的网络节点响应特征,构建节点的异常检测模型,获取数据低时延传输的延迟误差,过程如下式所示 (5) 根据获取的数据低时延传输的延迟误差,通过网络模型对数据传输时的码间干扰进行抑制,从而去除码间噪声,过程如下式所示 fF(k+1)=fF(k)-μ·∇fF(k)JMMDMMA= fF(k)-μF[ρ(k)(eMMDMMA(k)+jeMMDMMA-I(k))+ (1-ρ(k))(eR(k)+jeI(k))]y* (6) 式中,码间的抑制效果fF(k)。 依据容积Kalman滤波补偿数据低时延传输时时延,从而实现对自组织网络数据低时延传输时的延迟控制[9]。设定网络节点的自身采样间隔为d,数据低时延传输时的链路均衡模型如下式所示 (7) 式中,均衡调节系数标记为si(t),信道分配特征在节点m处的时延特征标记成xm(t),节点总特征为nm(t),网络阈值为p,节点系数为e,j,φ,m,i皆为自组织网络节点指数。 在上述计算结果中加入扩展系数,获取数据传输的滤波函数表达形式,结果如下式所示 (8) 式中,两个网络节点之间的距离为θi(t),传输时延为T,扩展系数为δ,网络中第i个节点特征的延迟系数标记为ai(t),相邻节点特征为Ts,滤波函数为h(t)。 依据上述扩展函数,设定网络节点总数为N,利用信道估计方法,完成对数据低时延传输时的优化控制,过程如下式所示 (9) 式中,自组织网络中第n条路径的网络延时系数为an(t),时延控制值为c(τ,t),扩展函数为δ,网络节点半径为π,频率为f,采样速率为τ,各个节点特征为t。 利用上述计算结果,对网络数据低时延传输过程中的时延进行补偿,提高传输时的控制能力。 基于上述数据低时延传输时的优化控制,利用DSPR算法完成网络的路由节点部署,获取网络数据传输时的最短路径。 3.1.1 选择初始簇头 选择网络内节点初始簇时,需要利用分布方式对簇头进行选择。设定P为候选节点的选中概率,获取过程如下式所示 (10) 式中,网络中的节点数量为N,选定为候选节点si的数量为k。 在数据传输的初始阶段,设定一个网络节点的阈值为ξ∈[0,1],若选中概率P小于等于ξ,可直接将其作为候选节点si。 设定Eresidual(si)为候选节点的剩余能量,相邻节点簇头为Ne(si),相邻节点簇头个数为|Ne(si)|。基于传输机制,候选节点之间会存在竞争关系,因此要引入逃避机制[10]。候选节点的逃避时间如下式所示 (11) 式中,候选节点si的延时时间标记为T,相邻节点簇头标记成Ne(si),剩余能量标记成Eresidual(si),初始能量标记成Einit(si)。 逃避结束后,若没有撞到其网络节点说明节点逃避时间短,该节点可退出竞争直接作为本帧初始簇头CH。 3.1.2 网关簇头 为连接自组织网络,需选择出更多的簇头。当簇头之间无法连接时,要在网络节点中选择更多节点,作为转发节点帮助初始簇头进行连接,这些转发节点作为网络的网络簇头[11]。在初始簇头竞争过后,落选的网络节点可进行二次竞争。该次竞争会偏重节点的剩余能量以及相邻的簇头数量,从而保证初始簇头的连接。节点竞争时依然要对退避时间进行规划,过程如下式所示 ×|Ne(si)|T (12) 等到退避时间完成,对网络节点周围进行检测,若相邻节点数量为0,说明网络节点未被初始簇头覆盖,该节点可成为网关簇头。若相邻节点数量为1,说明该节点被一个初始簇头覆盖,若相邻节点数量大于2时,说明网络节点在多个初始簇头的通信范围内,若周围簇头没有发生连接,将其作为网关簇头,帮助其连接。若周边簇头处于连接状态,可使其节点加入其中一方。 若竞争时发现该节点已成为初始簇头,该节点直接退出竞争。基于上述选取的簇头节点为基础,完成自组织网络路由的部署,实现网络的路由优化。 对自组织网络路由进行优化主要目的就是获取网络在数据低时延传输时的源节点最短路径[12]。 由于障碍物的影响,获取的最短路径可能会产生路径偏离,因此要利用贪婪的周边无状态路由对情况进行具体分析。设定源簇头与传输目的地之间的距离为d+b,障碍物长为l、宽为b,基于ROT策略,可获取最短路径的路径长度,过程如下式所示 (13) 基于上述计算结果,实现对自组织网络数据低时延传输的最短路径获取,从而降低网络能耗。 为验证上述网络数据传输最短路径路由算法的 整体有效性,需要对此算法进行测试。 分别采用本文提出的自组织网络数据低时延传输最短路径路由算法(算法1)、文献[3]提出的基于运动状态感知的容迟网络路由算法(算法2)、文献[5]提出的基于能耗区域感知的无线传感器网络路由算法(算法3)进行测试. 1)不同算法的网络节点能量消耗测试 在自组织网络进行数据低时延传输时,利用算法1、算法2以及算法3对选取最短路径后的网络节点能量消耗情况进行测试,测试结果如图1所示。 图1 不同算法的网络节点能量消耗测试 分析图1可知,随着数据传输时间的不断增加,网络节点的能量消耗呈不同程度的上升趋势。算法2在测试初期的节点消耗与算法1相接近,但是随着传输时间的增加,该算法下的网络节点能量消耗呈急速上升趋势,算法3所检测出的网络节点能量消耗是三种算法中最大的。综上所述。方法1在进行数据低时延传输时,网络节点的能量消耗小。 2)不同算法的网络寿命测试 采用算法1、算法2以算法3进行数据传输最短路径获取后,对多自组织网络的网络寿命进行测试,测试结果如图2所示。 图2 不同算法的网络寿命测试 分析图2所示,随着网络内障碍物的增加,三种算法下的网络寿命提升百分比呈现不同程度的下降趋势。当网络中障碍物较少时,算法3与算法1测试出的网络寿命提升百分比相同,且二者高于算法2,但是随着网络中障碍物的不断增加,算法2的网络寿命提升百分比逐渐高于算法3。方法1所检测出的网络寿命提升百分比要高于其两种算法。 3)不同算法的时间开销测试 数据在进行低时延传输时,控制时间开销的长短会直接反映出算法的优劣,对算法1、算法2以及算法3在网络数据传输时的时间开销进行测试,测试结果如图3所示。 图3 不同算法的时间开销对比 分析图3可知,时间开销少,算法性能越好。随着网络节点的不断增加,三种算法的控制时间开销呈上升趋势。算法2与算法3在测试初期的控制时间开销相一致,但是随着网络节点数量的增加,算法3的时间开销逐渐高于算法2。算法1所检测出的时间开销要低于算法2以及算法3,这主要是因为算法1依据容积Kalman滤波对数据低时延传输时的时延进行补偿,从而实现对自组织网络数据低时延传输时的延迟控制。所以方法1在进行数据低时延传输时的控制时间开销小。 4)数据传输优化控制前后输出幅值测试 基于上述实验结果,对数据低时延传输优化控制前后的输出幅值进行测试,测试结果如4所示。 图4 数据传输优化控制前后输出幅值测试 分析图4可知,网络在进行数据传输时,输出的幅值越高,传输时的数据质量越低。该算法数据传输优化控制后的输出幅值要低于优化控制前。 随着网络技术的不断更新,自组织网络的形式愈加复杂。如何在数据进行低时延传输时利用最短的时间找出最短路径,成为该领域不断需要解决的问题。针对网络数据传输过程最短路径路由算法中存在的问题,提出自组织网络数据低时延传输最短路径路由算法。该算法首先对数据传输时的网络时延进行优化控制;再利用DSPR算法完成网络的路由节点部署;最后通过路由部署结果实现对网络数据传输的最短路径获取。该算法由于在网络节点部署过程中存在一定问题,今后会针对该缺陷继续对该算法进行必要的优化处理。

2.2 码间干扰抑制

2.3 延迟控制



3 获取最短路径
3.1 获取同质簇

3.2 最短路径选择

4 实验


5 结束语
猜你喜欢
电脑知识与技术(2021年22期)2021-09-14
火控雷达技术(2021年2期)2021-07-21
计算机与网络(2020年9期)2020-07-29
网络安全和信息化(2019年11期)2019-11-25
花火B(2019年3期)2019-04-27
电子制作(2019年23期)2019-02-23
科技与创新(2018年1期)2018-12-23
雷达与对抗(2018年3期)2018-10-12
宇航计测技术(2018年3期)2018-09-08
北京航空航天大学学报(2017年3期)2017-11-23
