
基于威胁度评估的护航任务航路规划
2022-11-29 12:31邹建宇黄炎焱陈天德
计算机仿真 2022年10期
邹建宇,黄炎焱,陈天德
(南京理工大学自动化学院,江苏 南京 210094)
1 引言
随着“一带一路”战略的不断推进,我国海外投资、经商和旅游等重大项目日益开展起来,海上运输在“21世纪海上丝绸之路”中扮演着重要角色[1-2]。而海运作为最主要的运输方式在我国海外贸易中的地位日益凸显。因此,海上通道畅通与否,直接关系到“一带一路”战略的推进,海上贸易通道也就成为了中国外贸的生命线[3]。然而长期以来,在重要的海上战略通道上,海盗活动极为猖獗,已成为一个全球性“痼疾”和国际公害,对国际航运、海上贸易和海上安全构成严重威胁[4]。
在海外护航行动中,我方护航船只数量有限,而敌方往往具有隐蔽性强、目标数量多的特点,因为在无法同时对多个威胁度不同的目标进行驱逐且对障碍物进行避碰。所以需要寻求一个符合海外背景的动态航路规划算法。目前关于海上目标路径规划的研究主要围绕对障碍物进行避碰来展开,且只有一个目标点,而在海外护航任务中,具有多目标、多障碍物以及影响因素复杂的特点,传统的路径规划无法满足护航任务需求。常用的航路规划算法包括可视图法、A*算法、人工势场法、随机路标图法、混沌遗传算法等等。由于人工势场法其具有模型简单、解算快速和动态实时的特点,并且易将多个目标护航船只的影响进行耦合,将其综合体现在护航船只的动态航路规划中。
本文针对目标威胁度动态变化和对不同威胁值的多个目标同时进行驱逐或避碰的问题,量化指标中引入登船威胁度和距离威胁度,利用层次分析法实现实时威胁度评估模型;基于威胁度的实时评估和传统人工势场法,提出一种新的引力函数模型,并增加距离威胁度影响因素和应答判断,解决的多目标驱逐或避碰的问题。通过Matlab仿真结果表明,采用该方法得到了平滑的护航路径,有效的解决了具有动态威胁度的多目标护航航路规划问题。
2 威胁度评估模型框架
威胁评估模型通过建立多层次的评价指标体系,采用各指标效用函数赋权求和得到可疑船只的威胁度。模型由两部分组成,一部分是敌我双方的应答识别,对可疑船只进行敌我应答识别时,如果并未进行准确应答,则判断为敌方船只。另一部分是目标各时刻的威胁值。其中各个时刻的威胁度可分为:可疑船只意图、可疑船只登船危险度和可疑船只距离。可疑船只意图包括目标类型和目标武器荷载;可疑船只登船危险度由目标距离、目标航向和目标航速进行耦合。在与海盗实际作战的过程中,并非所有船只都选择登船作战,一些船只在一定距离内会对我方目标进行火力打击,所以加上把距离要素单独作为准则层的一个要素。
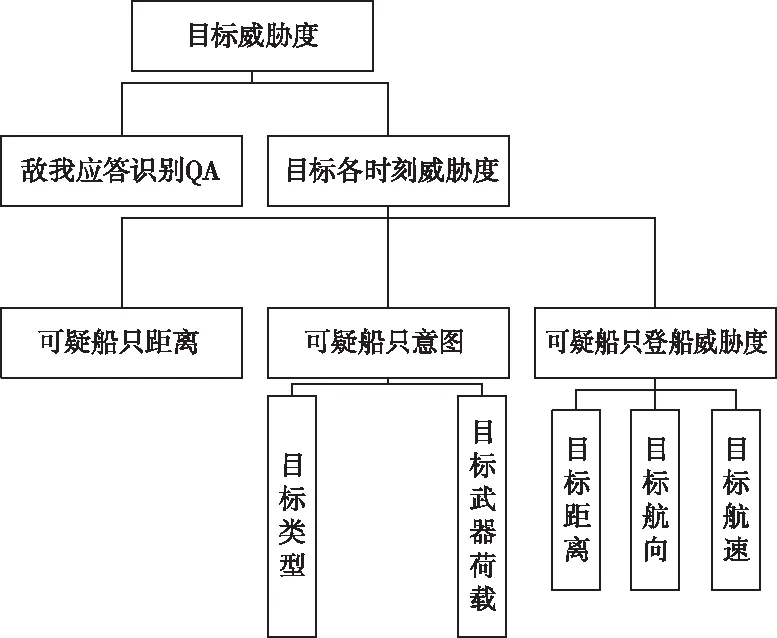
图1 可疑船只威胁度评估模型框架
2.1 威胁度评估指标量化
2.1.1 可疑船只意图
目标的威胁类型属于定性指标,对于海上可疑目标,可通过雷达、AIS或其它手段判别。本文依据海外常见的目标类型分为渔船、货船和快艇。当目标为快艇时,对我方商船具有潜在攻击性和登船危险,具有较大的威胁性,故在量化过程中取值较大;当目标为货船时,其机动能力较弱,但也具有一定潜在威胁,故在量化时取值适中;而目标为渔船时,由于海盗具有一定的伪装性,仍需要有一定的警惕意识,故在量化时取较小值[5]。根据专家相关经验,威胁类型量化表如表1所示。

表1 威胁类型量化表
目标的武器载荷属于定性指标,对于海上可疑目标,本文将其划分为有明确武器、无明确武器和未装备武器[5]。通过对可疑目标的态势信息的分析处理,判断其武器荷载程度,对于有明确武器的目标在量化时取较高的值;对于无明确武器的目标,应当考虑其有潜在武器或者隐蔽武器空间,量化值取适中;而对于已证实目标没有负载武器的空间与性能的目标,量化值取较低值。根据专家相关经验,威胁类型量化表如表2所示。

表2 武器荷载量化表
2.1.2 可疑船只登船威胁度
在海外航行中,海盗等海外军事势力可能会对来往商船劫持行动,以便于获取物资或者采取勒索行动。在可疑来船存在登船威胁的情况下,通过借鉴船舶领域中最近会遇距离(DCPA)与最小会遇时间(TCPA)的概念,将两船的速度、间距、航向等相耦合来建立登船威胁度的评估方法。
我船与可疑船只位置关系如图2所示。对设我船坐标(x0,y0),航速v0,航向φ0;可疑船只坐标(xT0,yT0),航速vT,航向φT;以我船为参照,可疑船只相对于我船的航向为φR,可疑船只相对于我船的真方位角为αT。来船相对于本船的航速为vR,航向为φR,来船相对于本船的舷角为θT,来船相对于本船的真方位角为αT,来船与本船的距离为RT[6-7]。具体计算如下:

(1)
vR=

(2)

(3)

(4)
DCPA=RT·sin(φR-αT-π)
(5)

(6)
式中,α与arctan()中分子和分母有关

(7)

图2 我船与可疑船只位置关系图
1) 空间威胁度
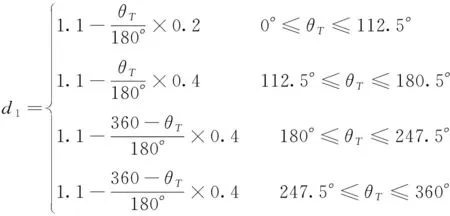
空间威胁度模型利用DCPA量化出登船可能性的大小;首先引入最低安全避让距离d1,指我船周围所保持的与可疑船只间的最低安全避让距离[6-7];相对于最低安全避让距离d1,空间威胁度零边界d2是指在空间威胁度中,围绕我船周围且空间威胁度为零的DCPA值,通常d2≈2d1[6]。
空间威胁度udT定义为

(8)
(9)

(10)
2) 时间威胁度
时间威胁度模型利用TCPA和d1的比较,量化出登船威胁的紧迫程度[6-7]。当可疑船只与本船相对距离大于D1时,即使存在空间登船的可能,但由于在相对距离过远,发生登船危险的紧迫程度不高,则定义在此范围外,时间威胁度为0。当相对距离小于D1时,进行时间威胁度的评估。
时间威胁度utT定义为
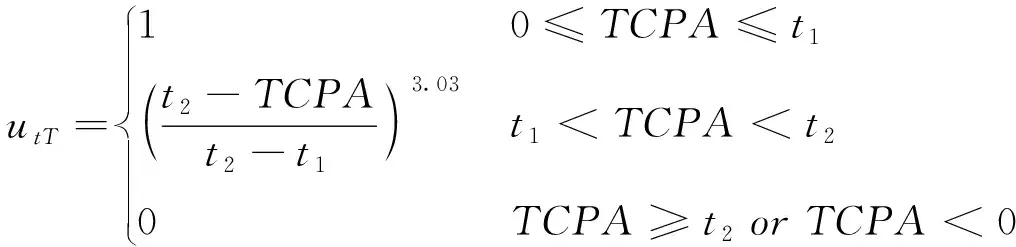
(11)

(12)
3) 登船威胁度总模型
由于TCPA<0表示可疑船只已驶过两船安全避让点[9],因此此时的可疑船只与我船不存在登船威胁,因此威胁度总模型[8]为

(13)
2.1.3 可疑船只距离威胁
本文中虽在登船威胁度中耦合了距离要素,但在不具备登船威胁度时,可疑船只仍在一定范围内具有对商船的攻击性,故将可疑船只距离威胁度单独作为一个准则层的一个要素。
当可疑船只与我船的距离越近,则对我船的威胁程度越大,反之,对我船的威胁程度越小。除此之外,距离越近时,威胁度增大的越快,距离越远时,威胁度增大的越慢,即威胁度与距离应是一个指数关系。由此,可疑船只与我船距离要素的效用函数为

(14)
式中,dsafe为距离威胁度零边界,即可疑船只与我船距离大于该值,则在距离上不对我船构成威胁;dalarm为我船的警戒距离,即在这个距离之内,可疑船只的威胁度直接为1;RT为可疑船只与我船的距离。λ、ζ为两个不小于1的正补偿系数。
3 基于层次分析法的实时威胁度评估模型
3.1 确定目标权重
层次分析法(AHP)通过将复杂问题的各个因素梳理为相互关联的有序层次,是一种定性与定量相结合的多目标决策分析方法[9]。本文通过赋权将各个影响要素的效用函数值加权求和,以此得到总的威胁度。海上可疑船只威胁度评估总模型为

(15)
式中,ωd、ωhi和ωT为对应要素的权重,且ωd+ωhi+ωT=1。利用层次分析法求权重具体步骤参考文献9。
设文中距离单位为海里(n mile)。威胁度评估模型中的参数设置为:安全距离为1.5 n mile,警戒距离为0.25 n mile。由专家打分并通过层次分析法得到的权重为:ωd=0.25,ωhi=0.3,ωT=0.45。
3.2 威胁度实时评估
如图3所示,本文首先设定一个威胁度阈值ω,每间隔一定时间T,检测计算目标当前时刻的威胁度,当迭代次数达到门限值θ次之后,选取当前时刻前后ΔT内各时刻的威胁度计算威胁度超过阈值次数的百分比λ,当λ>λ0时,判定目标为敌对船只。其中各个时刻的威胁度可分为:可疑船只意图、距离威胁度和可疑船只登船危险度。可疑船只意图包括目标类型和目标武器荷载;可疑船只登船危险度由目标距离、目标航向和目标航速进行耦合。

图3 实时威胁度评估流程
4 基于威胁度评估模型的动态航路规划
4.1 传统人工势场法的方法
人工势场法是将物体的运动视为一种在虚拟人工受力场中的运动[10]。人工势场由引力场和斥力场构成,其中目标点对物体产生引力,障碍物对目标产生斥力,物体所受到的引力和斥力的合力,驱动物体进行运动。在动态环境下,其引力势能函数如下
Uatt(qrobot,vrobot)=ξqρm(qrobot,qgoal)
(16)
式中,qrobot和qgoal分别为机器人和目标的位置坐标;vrobot和vgoal分别为机器人和目标的速度;ρ(qrobot,qgoal)为机器人到目标的距离;ξq为受距离影响的引力场增益系数;m和n为正常数。对应的引力函数Fatt(qrobot,vrobot)为引力势能函数的负梯度。传统斥力势能函数[11]如下

(17)
式中,η是斥力场增益系数;ρ(qrobot,qobs)是机器人到障碍物的最短距离;qobs是障碍物上的一个点,机器人到该点的距离是机器人到该障碍物的最短距离。对应的斥力函数Frep(qrobot)为斥力势能函数的负梯度。
4.2 人工势场法在海外驱逐行动中的难点
在海外非战争环境中,需要考虑地理、环境、政治等多方面复杂的因素,所以面对海盗袭击,护航部队首先是采取驱逐的措施,所以需要考虑以下几个因素:
1) 传统的引力函数中,对多目标进行驱逐时,驱逐目标在距离较远时,引力反而较大,机器人往远距离的目标移动。
2) 如果在驱逐过程中,与驱逐目标的距离太近,可能会发生碰撞,不利于驱逐的进行。
3) 在驱逐过程中,已证实为友方船只的单位或固定障碍物不具备引力,需要对其进行正常避碰措施。
4.3 改进措施
1) 为了解决多目标下的引力问题,本文引入一种新的引力函数:

(18)
2) 在驱逐的过程中,为保持安全距离进行驱逐行动,引入距离威胁度影响因素ξd,约束引力函数内的距离模块,行驶到目标船和障碍物的安全距离内,引力函数如下:

(19)
其中ρ(qrobot,qobs)为敌对目标到护航船只的距离;dalarm为警戒安全距离
3) 在态势感知的过程中,通过雷达/AIS等系统,进行敌我应答QA和其它方式识别,判断可疑船只是否为敌方目标或者静止障碍物,若为敌方目标或静止障碍物则进行驱逐行动,若为友方目标则进行正常的避碰措施。
(20)
综合以上海外驱逐行动影响因素的改进措施,可以得到引力函数总模型为

(21)
4.4 航路规划总模型
将上述改进措施结合传统人工势场法,其航路规划总执行过程如图4所示。首先判断驱逐行动是否完成,若完成驱逐行动,则返回护航目标的位置,进行正常航行。若还有可疑船只在安全范围以内,则先对可疑船只进行敌我应答识别,然后对其进行威胁评估。整个航路规划的目的是为了驱逐对护航目标造成威胁的可疑船只,并且不与友方目标碰撞。其中在威胁评估中,利用登船威胁度、目标意图和目标距离威胁度来进行实时威胁率的计算,综合判断海盗威胁行为的影响。对于通过敌我应答识别的船只和静止的障碍物进行正常避碰措施,对于判断为威胁目标的船只引入一种新的引力函数,进行驱逐行动。然后继续进行实时的威胁评估直到所有威胁目标离开安全范围,则返回护航目标点继续正常航行。

图4 航路规划总模型
5 仿真结果
设在动态环境中,护卫目标位置为(-1,-1),护航船只位置(0,0),在此海域中存在6个非己方船只和一个静态障碍物。通过雷达获取的目标在初始时刻的目标的威胁类型、武器载荷、速度、距离和航向角等信息如表3所示。

表3 初始时刻目标特征信息
如图5所示,首先通过敌我应答识别,判断出两个友方目标,在图中标为蓝色。然后对其它四个可以目标进行威胁评估判断可疑目标D的威胁度最大,则对其进行驱逐,途径一个静态障碍物,进行正常避碰。
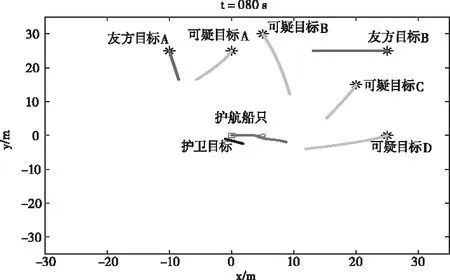
图5 t=80s时路径
如图6所示,可疑目标D加速运动,护航船只进行转向,继续对其进行驱逐警示。

图6 t=110s时路径图
如图7所示,可疑目标D开始驶离安全范围,威胁度降低,同时可疑目标B和可疑目标C开始接近护航目标,威胁度增加,护航船只进行转向,对其进行驱逐警示。

图7 t=135s时路径图
如图8和图9所示,在对可疑目标B和C驱逐过程中,可疑目标C仍处于安全范围内,威胁度保持较高水平,而可疑目标B航向偏移,逐渐驶离安全范围,威胁度降低,则护航船只对可疑目标C继续进行驱逐。在驱逐过程中,二者被判断为威胁目标,且威胁度相似,所以护航船只有往二者中间航行的趋势,兼顾两个目标进行驱逐行动。

图8 t=160s时路径图
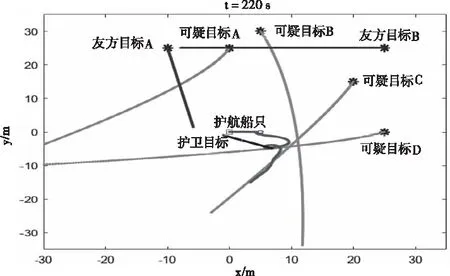
图9 t=220s时路径图
如图10所示,在所有威胁船只均驶离安全范围后,护航船只回到护航目标位置,继续进行正常航行。

图10 t=350s时路径图
所有时刻的威胁率下如表4所示。

表4 各目标实时威胁度
6 结束语
本文针对目标威胁度动态变化和对不同威胁值的多个目标同时进行驱逐或避碰的问题,在传统量化指标的基础上,根据海外护航行动的特点,引入登船威胁度和距离威胁度,解决海外船只意图判断不明的问题。利用层次分析法对目标进行实时威胁评估,利用设置威胁度门限值获取目标威胁率,对意图判断的问题进行进一步优化。基于威胁度的实时评估模型和传统人工势场法,引入一种新的引力函数,使护航船只航行到合适的位置对多个目标进行警戒驱逐,同时对障碍物进行避碰。在此基础上增加了距离威胁度和应答判断,增加了威胁评估效率,优化了护航船只在威胁度过大的船只附近的震荡问题。通过Matlab仿真结果表明,本文建立的模型是有效可行的。
猜你喜欢
当代陕西(2020年15期)2021-01-07
动漫界·幼教365(中班)(2020年3期)2020-04-20
创新作文(1-2年级)(2019年4期)2019-10-15
好孩子画报(2019年10期)2019-01-10
儿童故事画报·发现号趣味百科(2016年6期)2016-08-19
第二课堂(课外活动版)(2015年4期)2015-10-21
环球时报(2012-03-13)2012-03-13
