
利用特征提取方法检测前方车辆
2022-11-27 10:35郭淑清
机电工程技术 2022年10期
金 敏,郭淑清
(1.北华大学土木与交通学院,吉林吉林 132000;2.吉林机电工程学校,吉林吉林 132000)
0 引言
当前国内外用视觉传感器检测前方运动车辆的主要方法有基于机器学习检测法、基于模型检测法以及基于特征检测的方法。视觉传感器检测前方运动车辆的原理是将采集到的图像划分区域,分为车辆与非车辆区域,然后定位车辆区域,继续跟踪获取信息,并采取预警等措施提醒驾驶者,避免发生交通事故。
王烨之等[1]研究了机器学习的检测方法检测前方车辆。这种方法需要在大量样本集中提取前方车辆特征,再训练出目标是否为车辆的决策边界,最后目标被分类器判断出来。但是这种方法由于无法预先判断车辆可能存在的区域,需要全面搜索采集到的所有图像,因此,运算量是非常大,有可能造成信息的迟滞。
王玲、宋欢欢等[2-4]提出了基于模型检测方法。这种方法是利用固定的算法去搜素已建立的二维或三维模型的前方运动车辆。运用这种方法,如果模型建立的少,则无法准确检测到全部车辆,如果大量建立模型,由于车辆外形各异,那又会增大运算量,难以保证获取信息的实时性。
基于以上对本课题的相关研究存在的一些问题,本文提出了基于特征的检测方法,又称为基于先验知识的检测方法,检测前方车辆。这种方法就是要利用车辆的外部特征,将车辆与道路上的其他物体如楼房、树木等区别开来,从图像中检测出前方车辆然后预警。目前常用的方法有基于位置、阴影、边缘、对称等的特征检测方法。而本文提出的聚合通道特征(Aggregate Channel Features,ACF)是将这些通道特征结合到一起,形成特征,结合多通道特征的信息,能够更准确地描述车辆特征。
1 车辆检测视觉传感器
车辆用到的传感器一般有超声波传感器、毫米波雷达、激光雷达、视觉传感器等。超声波传感器成本低,原理简单,但测距精准性受室外温度影响大,衰减快,因此超声波雷达适合短距离测距,例如泊车系统;激光雷达,测距范围较广,但其价格昂贵,一般只有L4和L5级自动驾驶汽车才使用。因此在实际应用中,常用的车辆检测传感器是毫米波雷达和视觉传感器。又由于高频率的毫米波雷达探测距离较远,因此在智能网联汽车中,检测安全性要求较高的车辆,多数使用毫米波雷达,如自适应巡航控制系统、前方碰撞预警系统、自动制动辅助系统等。
相比以上传感器,视觉传感器信息采集形式为图像,采集的信息更加丰富,测量范围广并且成本低。因此,机器视觉是目前实现前方车辆检测的主要传感器。
2 基于特征提取的车辆检测方法
特征提取是计算机视觉和图像处理中的一个概念。它指的是使用计算机提取图像信息,决定每个图像的点是否属于一个图像特征。特征提取的结果是把图像上的点分为不同的子集,这些子集往往属于孤立的点、连续的曲线或者连续的区域[5]。将特征提取运用在前方车辆检测上,是把车辆的信息与其他物体的信息区别开,将其提取出来,并且取得前方车辆与本车的位置关系、前方车辆的大小等基本信息。
基于特征的检测方法又称为基于先验知识的检测方法,这种方法就是要利用车辆的外部特征,例如车辆尾部是左右对称的,具有对称性,车辆的造型一般比较规则,尾部图像接近矩形等,将车辆与道路上的其他物体如楼房、树木等区别开来,从图像中检测出前方车辆然后预警。目前常用的方法有阴影特征方法、边缘特征方法、位置特征方法、对称性特征方法等。下面逐一介绍。
2.1 阴影特征方法
在检测时,前方运动车辆底部的特征是非常明显的。通常的方法是检测车辆底部阴影,这个阴影在光照下一般是比较规则的几何形状,从这个特别的几何形状里可以判断前方是否是车辆。
2.2 边缘特征方法
前方运动车辆边缘特征明显,视觉传感器采集到车辆尾部的下边缘,计算其宽度,再利用相似三角形原理可以判断其距本车距离。
2.3 位置特征方法
前方运动车辆一般情况下是行驶于车道区域之内的,所以先检测车道区域,可以缩小检测范围,提高检测效率,增加检测精准度。
2.4 对称特征方法
在灰度化的图像中,前方运动车辆表现出较为明显的对称特征。这个对称性特征可分为两种,一种是几何特征上的对称,车辆尾部是左右对称的,这种特征是非常容易与其他物体区分开来的;另一种是灰度对称特征,这也是源于车辆在几何特征上是对称的,因此也会在图像上呈现灰度对称。
由于天气情况和路况的复杂性,仅用一种特征检测去搜索前方运动车辆是难以达到理想的准确度的,所以可以将多个特征相融合,检测前方运动车辆。聚合通道特征(Aggregate Channel Features,ACF)是将这些通道特征结合到一起,形成特征,结合多通道特征的信息,能够更准确地描述车辆特征。
计算流程如图1所示。其中包含有梯度幅值通道、颜色通道、梯度方向直方图通道等共10个通道的聚合特征[6]。首先进行一次滤波,然后把通道划分为4×4大小尺寸的块,使用双线性插值法对每一个小块内进行像素求和并求出像素平均值,再对结果进行二次滤波处理,这样便得到了ACF特征[6]。

图1 ACF计算流程
使用下采样双线性插值对ACF特征进行计算,计算过程如下:通过双线性插值法降低图像分辨率,在一定区域内,通过已知像素值估算未知像素值,最终达到表示整个区域的效果。如图2所示,Q11、Q12、Q21、Q22点为已知像素点,点P为未知点像素,各点像素值分别为f(Q11)、f(Q12)、f(Q21)、f(Q22)和f(P)。在X方向上对点P插值计算[6]:
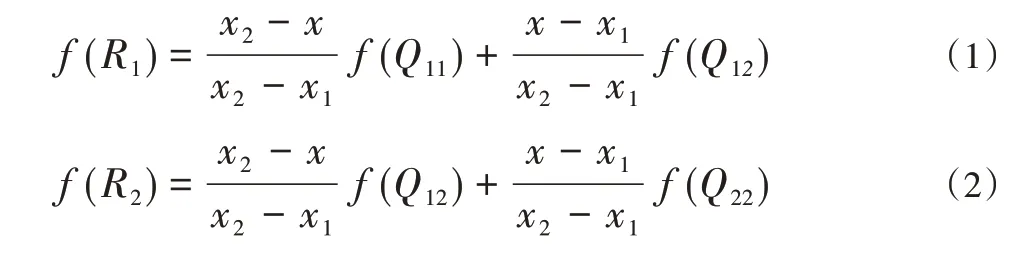
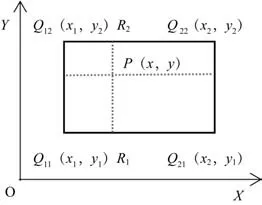
图2 双线性插值计算示意图
f(R1)、f(R2)分别为 点P在X方向插值后所得的两点R1、R2的像素值。再对点P进行Y方向插值计算:

由此,便得到了点P的最终估计值。
因此,运用ACF特征提取的前方车辆检测技术,能够达到良好的稳定性和准确性,可以提高检测准确率和检测效率。
3 车辆检测仿真验证
目标检测方法的基础是图像识别。在图片上选出所有物体可能出现的区域框,对这些区域框提取特征,然后进行信息分类,筛选出前方车辆信息,输出结果。本文分别运用RCNN(Region-based Convolutional Neural Networks)和聚合通道特征(Aggregate Channel Features,ACF)两种目标检测法,进行对比检测,选出更准确、高效的检测方法。
3.1 RCNN检测方法
RCNN(Region-based Convolutional Neural Networks)采用提取框,对每个框提取特征、图像分类、筛选前方车辆信息、输出结果,这4个步骤进行目标检测。特别之处是在提取特征这一步,采用了深度卷积网络提取的特征。
3.2 聚合通道特征检测方法(ACF)
同样采用提取框,在提取过程中将多个通道特征结合到一起,形成特征,结合多通道特征的信息,能够更准确描述车辆特征。
3.3 实验环境
实地采集样本,拍录原始图像,在同一条路上分别选取白天、黄昏、夜间3个时间段进行街拍,并且分单车、多车不同场景进行拍录。然后采用聚合通道特征(Aggregate Channel Features,ACF)和RCNN(Region-based Convolutional Neural Networks)两种方法分别进行检测。
3.4 主要步骤
(1)拍录原始图像;(2)读取原始图像;(3)检测图像中车辆;(4)将检测结果标注在图像上;(5)显示检测结果。
3.5 前方车辆检测结果
前方车辆检测结果如图3所示。黄颜色矩形框为检测结果。根据实际的对比、检测,单车检测中聚合通道特征(ACF)能够检测出前方车辆,然而RCNN在光线不好的情况下(黄昏、夜晚)没有检测到前方车辆,或者错检车辆。多车的检测中,聚合通道特征(ACF)检测能够检测出前方车辆,RCNN检测中会把楼宇、垃圾袋等物体检测成车辆,错检率较高。综上所述,聚合通道特征(ACF)检测法在仿真实验中检测准确,更具有工程实践价值。

图3 前方车辆检测结果
4 结束语
本文针对前方车辆检测的特点,介绍了选择视觉传感器进行车辆检测的主要原因是成本低、信息获取丰富,对比前人提出的机器学习、光流场法、模型法等视觉传感器目标检测及检测方法,提出本文的研究方向,采用聚合通道特征(Aggregate Channel Features,ACF)进行前方车辆检测,最后使用基于ACF特征提取的方法对不同时间段,单车、多车等不同情境进行前方车辆检测仿真验证。仿真结果表明,基于ACF特征提取的前方车辆检测技术,提高了检测准确率和检测效率,具有理论研究意义和工程应用价值。但本次研究采集样本有限,没有对更多天气情况及多种复杂路况进行样本采集,下一步将针对这方面的不足,予以改进,使实验样本更加丰富。
猜你喜欢
小哥白尼(军事科学)(2022年2期)2022-05-25
纺织科学研究(2021年1期)2021-12-03
电子制作(2019年22期)2020-01-14
北京航空航天大学学报(2019年9期)2019-10-26
红领巾·萌芽(2019年8期)2019-08-27
电子制作(2019年15期)2019-08-27
电子制作(2019年15期)2019-08-27
时代英语·高一(2019年1期)2019-03-13
电子制作(2018年19期)2018-11-14
电子制作(2018年9期)2018-08-04
