机载激光雷达1∶500地形图测绘理论与实践
2022-11-25 06:20尚海兴贺春林张西龙
西北水电 2022年5期
张 钊,周 伟,尚海兴,贺春林,张西龙
(1. 中国电建集团西北勘测设计研究院有限公司, 西安 710065;2. 国家能源集团西藏电力有限公司,西藏 林芝 860019)
0 前 言
1∶500地形图精度要求高,测图时需获取地面精准高程信息。常规光学相机无人机航摄系统在大比例尺地形图测绘项目中广泛应用,但面对植被密度大、覆盖厚的地区时,相机难以获取植被覆盖层下真实的地面高程数据[1];且受相机畸变及影像质量等因素影响,要保证高程精度,在空中三角测量计算时需要一定数量像控点参与其中。姜华提出可以使用消费级无人机进行1∶500地形图制作,但对像控点仍有一定需求[2];朱岩隆、朱晓康等采用光学航摄仪无人机系统免像控生产1∶500地形图[3-4];李国峰探讨了免像控无人机航测技术在1∶500地形图测绘中的应用,但在植被茂密地区应进行人工补测[5];赵立根提出固定翼无人机倾斜摄影可在用于1∶500地形图测绘,但该方法对影像质量要求高且在植被覆盖区域精度难以保障[6]。综上所述,植被覆盖区免像控测制1∶500地形图的解决方案较少。本文以平地、丘陵、山地3种不同地形的光伏测绘项目为例,介绍机载激光雷达(以下简称LiDAR)在1∶500地形图测制中的作业流程和相关经验,检查地形图成果的精度,分析在植被覆盖区机载激光雷达技术较传统光学影像航测技术的优势。
1 技术工作原理及作业流程
1.1 航测关键参数计算
根据测绘行业标准,LiDAR测量1∶500地形图时点云密度应大于16点/m2,即点云航向和旁向点间距均应小于0.25 m;预设地面分辨率小于0.05 m,航摄影像重叠度为20%~ 30%,LiDAR点云获取重叠度至少为20%[7-12]。
LiDAR参数和航摄仪参数在航线设计时联动,一般在确定航摄仪重叠度后计算航线间距,再使用航线间距计算出激光LiDAR点云重叠度,最终机载LiDAR与光学航摄仪同时工作时使重叠度均满足规范要求且航线间距最大。在计算重叠度时,与平坦地形不同的是山地或地面倾角过大区域需加入地面倾角参数,以保证最高点重叠度满足要求。预设航摄仪旁向重叠度后,满足要求的航线间距计算式可表示为:
(1)
LiDAR扫描宽度为
(2)
计算出满足要求的LiDAR点云旁向重叠度计算式为
(3)
(4)
公式(1)~(4)中:D为航线间距,m;F为航摄仪画幅宽度,mm;h为无人机相对航高,m;f为航摄仪主距,mm;Pc为航摄仪旁向重叠度,%;Ll为LiDAR扫描宽度,m;Rmax为LiDAR最大测量距离,m;Pl为LiDAR点云旁向重叠度,%。
兼顾LiDAR最大测量距离和拟采集的点云密度2种参数选择扫描频率,并计算无人机相对航高;根据预设的影像航向重叠度、LiDAR点云航向间距、无人机飞行速度计算LiDAR工作线速。
1.2 原始数据获取及其注意事项
(1) 无人机机载LiDAR系统集成了无人机平台、GNSS、惯性导航系统(INS)、激光扫描仪(scanner)和数码相机等设备。其中,定姿定位系统(POS)获取差分基准站数据、差分流动站数据、星历数据、惯性导航数据;LiDAR系统中的scanner获取LiDAR点云数据,光学航摄仪获取光学影像数据及通过检校后得到航摄仪检校参数。无人机机载LiDAR各系统获取数据类型见图1。

图1 机载LiDAR各系统组成及获取数据类型
(2) 航测作业前,一般先将GNSS差分基准站架设在开阔的已知控制点上,尽量保证该控制点拥有与IGS站联测的经纬度及大地高。架设的控制点距本架次有效航摄区域最远处一般不超过5 km,且开关机应分别早于和晚于无人机POS系统10 min进行[13]。
(3) 航测作业时,每次开机后使LiDAR系统在开阔区域静置等待3~5 min,此时POS系统进行初始化改正并锁定卫星,作业结束后按同样方法静止。无人机起飞后,手动控制无人机或按预设航线进行“8”字绕飞,以激活INS中的陀螺仪,加速惯导收敛并使其找北方向。为控制惯导偏移,一般规划航线时还需考虑直线段距离应在一定范围内[14]。
1.3 数据处理及其注意事项
(1) 处理数据时,先将惯导数据、机载差分数据、差分基准站数据、公开的星历数据等整理后再加入设备自身的偏心改正值计算得出轨迹文件及精准POS数据(纬度B、经度L、椭球高H、航向角Kappa/Heading、 俯仰角Omega/Pitch、滚转角Phi/Roll等)。解算时,需检查GNSS差分解是否固定,PDOP值、周跳等是否合格,各参数满足要求后方可使用。LiDAR系统中POS解算一般优先使用计算精度更高的紧耦合解算方式。紧耦合原理如图2所示。
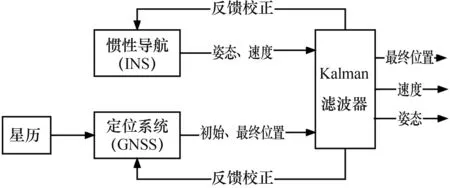
图2 紧耦合原理
(2) 因重叠度的设置,相邻航带间同名点会出现三维偏移现象[15],LiDAR扫描的点云误差会随扫描角度增大而增大,一般小开角扫描到的点云精度大于大开角。预处理数据时一般据此理论进行航带拼接处理。
(3) 在实际环境中和设备的干扰影响下,生产的点云不可避免会存在一定数量的噪声点。此时需对噪声点数据进行消除,避免其在点云分类时对计算造成影响从而出现分类错误的情况。
(4) 人机交互的进行点云去噪、去冗余、点云分类、点云赋色等系列操作后,使用处理后的点云生产点线地形数据。使用预处理后计算出的POS数据、光学影像数据与航摄仪检校参数生产正射影像图(DOM),再根据DOM采集地物数据。最后将地形点线数据与地物数据结合后再人工编修、整饰、质检生产最终的数字线划图(DLG)。
从学历、专业、工作年限、经验、能力素质、认证、专业技能、熟练程度等多个维度构建紧缺岗位的岗位画像。企业招聘人员会在招聘网站对招聘岗位进行详细的岗位要求描述。通过对企业岗位要求描述进行文本分析,将岗位要求分为八大类,分别是能力素质、专业认证、学历水平、经验要求、经验年限、技能掌握程度、所学专业、专业技能。目录以八大类要求为岗位画像维度,全方位展示每个紧缺岗位的能力、技能、经验等具体要求情况,并对岗位的具体要求按照需求数量进行排序。
2 工程应用
本次使用同一套机载LiDAR系统对平地、丘陵和山地3种地形的2个案例项目进行测绘并对成果进行分析。LiDAR参数为:最大测量距离1 350 m(反射率>60%),最大视场角330°,测量精度1.5 cm,姿态角度精度为0.005°,无限次回波。相机参数为:有效像素4 200万,镜头焦距18 mm。
2.1 案例1
(1) 概况与方案
该项目位于内蒙古自治区,为光伏能源基地建设项目。项目面积约为10 km2,地形类型为平地和丘陵沙地,地物以灌木为主,通车困难,拟生产1∶500地形图。在项目范围内按常规方法均匀布设像控点,并使用RTK实测若干地面检查点作为对成果精度的检核[16-17]。设计本案例的目的为计算同一地区机载LiDAR数据与标准像控光学相机航测数据的平面高程精度,并分析不同密度和厚度的植被覆盖区2种点云的高程差值情况。
使用机载LiDAR系统对项目区域进行航测后,设计A、B两种方案将获取到的数据分开后计算并输出成果。方案A为免像控机载LiDAR作业技术应用,使用LiDAR点云数据和光学影像等数据生产中间数据后制图,生产过程中无地面像控点参与其中;方案B为标准像控光学相机测图技术应用,使用光学影像数据结合地面像控点数据生产中间成果后制图。
使用方案A生产的中间数据DOM和LiDAR点云成果记为Ad与Al,使用方案B生产的中间数据DOM和光学点云成果记为Bd与Bl。2种方案的成果数据与原始数据对应情况见表1。

表1 方案A、方案B成果数据与原始数据
(2) 精度检查及结果分析
均进行去噪、去冗、地面点分类等操作后,将2种点云进行叠加对比分析,再使用实测检查点对2种DOM数据平面精度及2种点云的高程精度进行检查。中误差计算如下:
(5)
公式(5)中:m代表中误差,m;Δi代表较差,m;n为检查点个数。
在项目范围内分别挑选公路、田地、荒地、草地等地表植被覆盖由少至多的不同区域进行机载LiDAR点云和光学影像点云剖面对比。对比后发现,同一剖面上Al与Bl在公路区的高程较差最大不超过0.03 m,剖面对比图如图3(a)所示;田地区高程较差最大不超过0.05 m,剖面对比如图3(b)所示;荒地区高程较差最大不超过0.10 m,剖面对比如图3(c)所示;草地区高程较差最大不超过0.10 m,剖面对比如图3(d)所示。通过4种区域的剖面对比图并结合实测检查点检查,发现在地表裸露较多的公路、田地区域Al与Bl高程接近,植被覆盖的荒地、草地区域Al的精度较Bl更高。
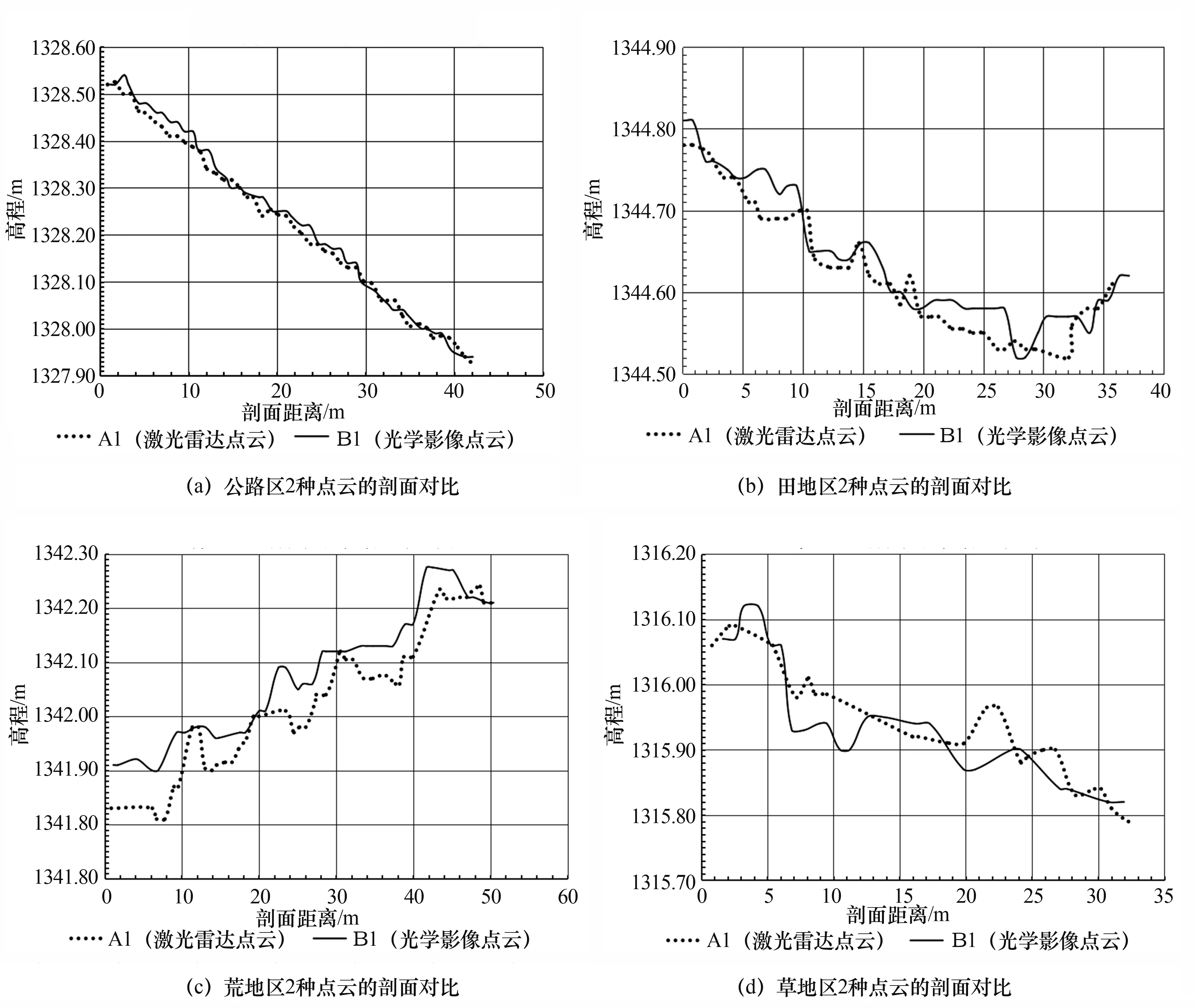
图3 不同区域Al(激光雷达点云)与Bl(光学影像点云)剖面对比
2.2 案例2
(1) 概况与方案
该项目位于云南省,为分布式山地光伏项目。项目总面积约为5 km2,地形类型为山地,地物以大面积灌木及部分树林为主,无通车条件,像控点布设困难,拟生产1∶500地形图。设计本案例的目的为检查分析机载LiDAR免除像控点进行1∶500地形图测绘的成果精度。
在案例区范围内使用RTK在房角、电杆根部、道路标线等能明显分辨平面位置区域实测平面检查点34个,在草地、林地及裸露区地面实测高程检查点285个,未测设像控点,使用LiDAR系统对项目区域进行航测。使用实测检查点对机载LiDAR点云和平面地物数据进行精度检查。
(2) 精度检查及结果分析
使用实测检查点检查机载LiDAR点云的高程精度,检查DOM的地物平面精度,通过计算得到点云和DOM平面及高程中误差。统计结果见表2、3和表4 。

表2 部分高程较差统计表

表3 平面位置误差统计表

表4 高程误差统计表
根据GB 50026-2020《工程测量标准》中的要求,测制1∶500地形图时山地地形的平面中误差为0.40 m,高程中误差为0.33 m[11]。通过计算得出:本次平面位置中误差mS为0.20 m,DOM平面精度满足相应要求;小于等于1倍平面中误差限差的点占比100%,无大于1倍平面中误差的点。高程中误差mH为0.18 m,点位高程精度满足相应要求;小于等于1倍高程中误差限差的点占比93%,大于1倍高程中误差小于2倍高程中误差的点占比7%,无大于2倍高程中误差的点。
3 结 论
(1)在平地、丘陵、山地3种地形中使用机载激光雷达系统免像控进行航测,地形图成果平面中误差均不大于0.20 m,高程中误差均不大于0.18 m,平面高程中误差满足测绘规范中1∶500地形图的精度要求。表明机载激光雷达技术可替代标准像控光学影像航测技术免像控测制1∶500地形图。
(2)通过剖面图对比和实测点检查发现,机载雷达点云、光学影像点云的高程较差与测量区域的植被覆盖厚度、密度成正相关,雷达点云高程更接近检查点高程成果。表明在植被覆盖区机载激光雷达系统能更加准确的测量地面高程,较传统光学相机航测精度更优。
猜你喜欢
初中生学习指导·中考版(2022年4期)2022-05-12
计算机系统应用(2022年4期)2022-05-10
天津医科大学学报(2021年4期)2021-08-21
中学生数理化(高中版.高考理化)(2021年5期)2021-07-16
当代陕西(2020年23期)2021-01-07
国际呼吸杂志(2019年4期)2019-03-12
安徽地质(2016年4期)2016-02-27
现代计算机(2015年31期)2015-09-28
全球定位系统(2015年4期)2015-02-28
航天返回与遥感(2014年1期)2014-07-31