
基于微波干涉雷达的斜拉桥索力测量方法
2022-11-25 13:25:02王翼超樊梓元朱志远
河海大学学报(自然科学版) 2022年6期
黄 侨,王翼超,任 远,樊梓元,朱志远
(东南大学交通学院,江苏 南京 210096)
对于缆索承重体系桥梁,索力是其重要力学特性指标之一。桥梁结构的刚度变化、边界约束条件的改变以及超载、船撞等突发事件,均会引起索力改变[1-4]。因此,对于运营中的缆索承重桥梁,准确、高效地获取其索体系(包括悬索桥主缆与吊索、斜拉桥斜拉索)状态极为重要,有助于桥梁管理人员及时掌握全桥的工作状况。
目前,拉、吊索索力测量方法主要有油压表读数法、压力传感器读数法、振动频率法和磁通量法等方法[5-6]。其中,油压表读数法不适用于已建成通车的桥梁[7-8];压力传感器无法加装于运营中的桥梁,且传感器成本较高[9-10];磁通量法前期成本高,尚未能在国内得到大面积推广[11];振动频率法基于弦振动理论,利用桥索的固有振动频率与索力的关系,通过传感器获取拉索的振动信号并对其进行频谱分析,然后计算得到索的基频,再换算得到该索的索力,是目前使用最广泛的索力测量方法[12]。
目前索力测量采用的仪器主要为接触式加速度计,但用于检测运营中的斜拉索存在以下问题:检测人员每次能检测的斜拉索数量有限,且需要登高设备辅助,检测效率较低;由于桥梁在运营中,接触式测量增加了检测人员的安全风险;由于检测点较低和受斜拉索端部阻尼器影响,接触式加速度计的检测精度也会受到影响[13]。
微波干涉雷达是一种新型的远距离无接触桥梁动态变形测量装置,获取的数据为结构物表面的动态变形值,而非传统动态测量装置检测的结构物加速度信息。IBIS-S微波干涉雷达系统是由意大利IDS公司与佛罗伦萨大学共同开发的基于微波干涉测量技术的变形监测设备,近年来,国外学者对其进行了大量的试验,验证了该系统的精确度,并得出该系统在测量桥梁构件振动响应方面具有较好的适用性,具有非接触、高精度、动态测量、不受雨雾天气影响等特点[14-17]。国内学者主要将IBIS-S微波干涉雷达系统应用于高层建筑及桥梁的变形观测领域,对其在索力测量领域的研究较少[18-23],且局限在索力测量可行性的研究,缺少针对微波干涉雷达索力测量方法实桥应用细节的系统性研究,没有形成微波干涉雷达索力测量理论体系和试验方法及索力测量作业的标准化流程。为此本文提出了一种基于微波干涉雷达的斜拉索索力测量方法,并应用IBIS-S微波干涉雷达系统进行了实桥斜拉索的索力测量。
1 微波干涉雷达索力测量原理
微波干涉雷达作为一种动态变形测量装置,采用了步进频率连续波(stepped frequency continuous waveform, SFCW)技术与干涉测量技术[20-21],能够同时对距雷达不同距离的目标物体进行动态测量。微波干涉雷达利用SFCW技术提高雷达系统的距离分辨率,可检测不同目标索在雷达视线上的位置;采用干涉测量技术,通过采集目标物体反射的电磁回波相位信息分析相位差,得到目标索的位移时程信息。为计算索力,采用快速傅里叶变换(fast Fourier transform, FFT)对微波干涉雷达采集到的各目标位移时程信息进行频谱分析,提取目标斜拉索的振动基频,最后根据振动频率法推算斜拉索索力。
1.1 SFCW技术
采用SFCW技术的微波干涉雷达系统能够发射N组频率以Δf逐组递增的电磁波。由于微波干涉雷达的扫频带宽(雷达发射和接收频率的范围)B=(N-1)Δf,SFCW技术能够使微波干涉雷达系统达到一个较大的有效带宽。微波干涉雷达的距离分辨率Δr是沿雷达视线能够区分出不同物体的最小间距,计算公式为
(1)
式中c为真空中的光速。
当雷达扫频带宽B越大时,Δr越小,因此SFCW技术能够使雷达系统获得一个非常高的距离分辨率,提高区分雷达视线上不同物体的能力。
通过SFCW技术可得到一个一维的雷达图像轮廓(图1)。从图1可以看出,微波干涉雷达仅拥有一维成像能力。当不同目标与雷达距离不同时,雷达可以单独地检测到每一个目标;若不同目标与雷达距离相同时,即使它们不在同一轴线上,雷达也无法进行识别。不同目标处于同一距离单元中,将会引起回波信号混叠。

图1 雷达图像轮廓Fig.1 Radar image profile
1.2 干涉测量技术
基于干涉测量技术,微波干涉雷达可通过持续对观测物发射电磁波来比较目标在不同时刻反射的电磁波相位信息φ1、φ2,根据回波相位差可计算得到目标物沿雷达视线方向的位移d(图2):
(2)
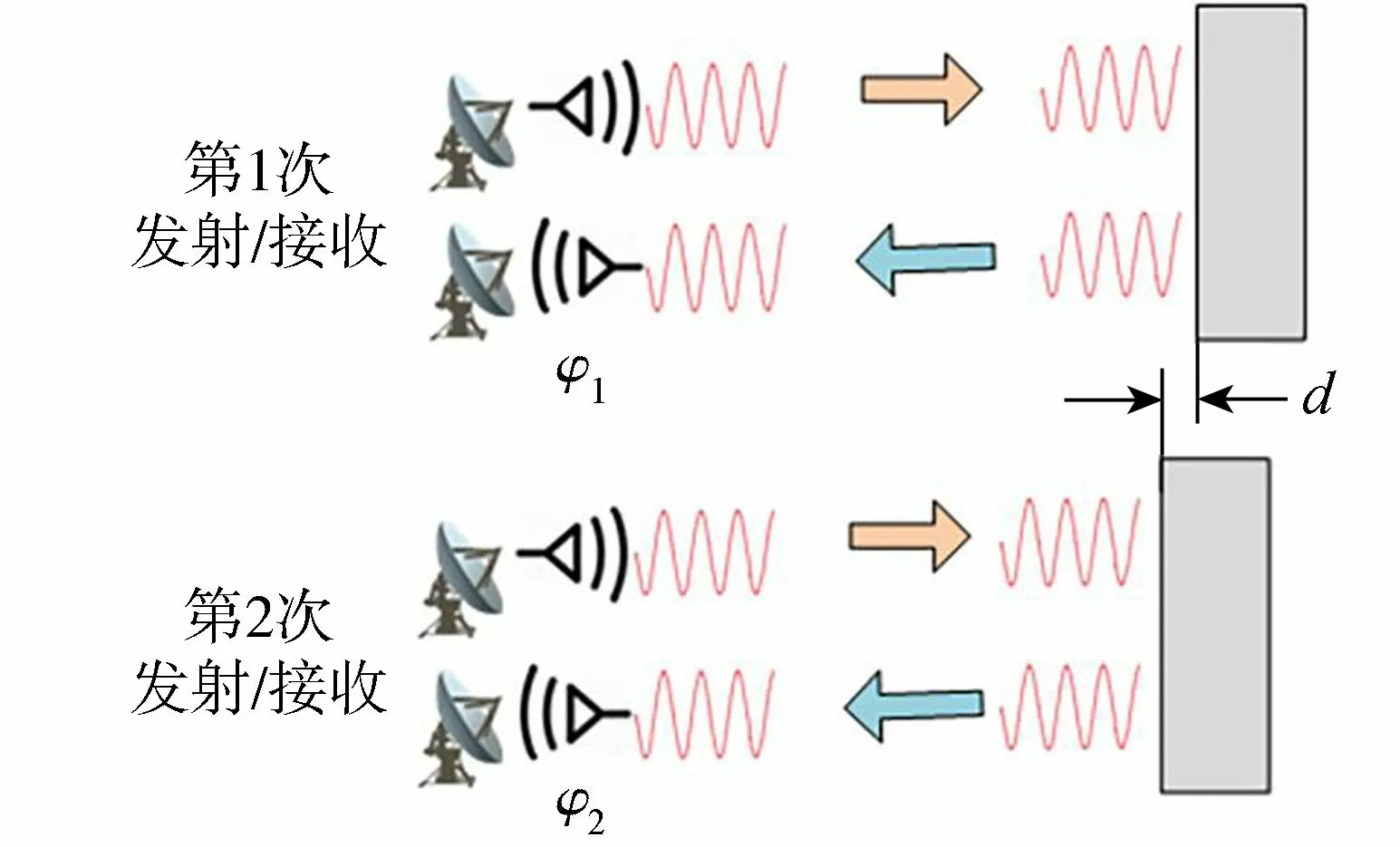
图2 干涉测量原理示意图Fig.2 Schematic diagram of interferometric measurement principle
式中λ为电磁波波长。
1.3 振动频率法
振动频率法基于弦振动理论,利用斜拉索固有振动频率与索力的关系,通过斜拉索的振动基频结合斜拉索计算长度、线密度等计算斜拉索的索力。弦振动理论的动力平衡方程为
(3)
式中:EI为斜拉索的抗弯刚度,其中E为斜拉索截面的弹性模量,I为斜拉索截面的惯性矩;y为斜拉索振动位移;x为沿斜拉索长度方向的坐标;t为时间;T为实测索力;m为斜拉索每延米质量。
若斜拉索两端铰接,式(3)可简化为
(4)
式中:l为斜拉索计算长度;fn为斜拉索第n阶固有振动频率;n为斜拉索振动的阶次。式(4)中第1项为理想弦模型下的计算公式,第2项为斜拉索抗弯刚度影响。若忽略第2项的影响,式(4)将进一步简化为
(5)
1.4 索力测量流程
本文设计的微波干涉雷达索力测量的作业流程如图3所示。
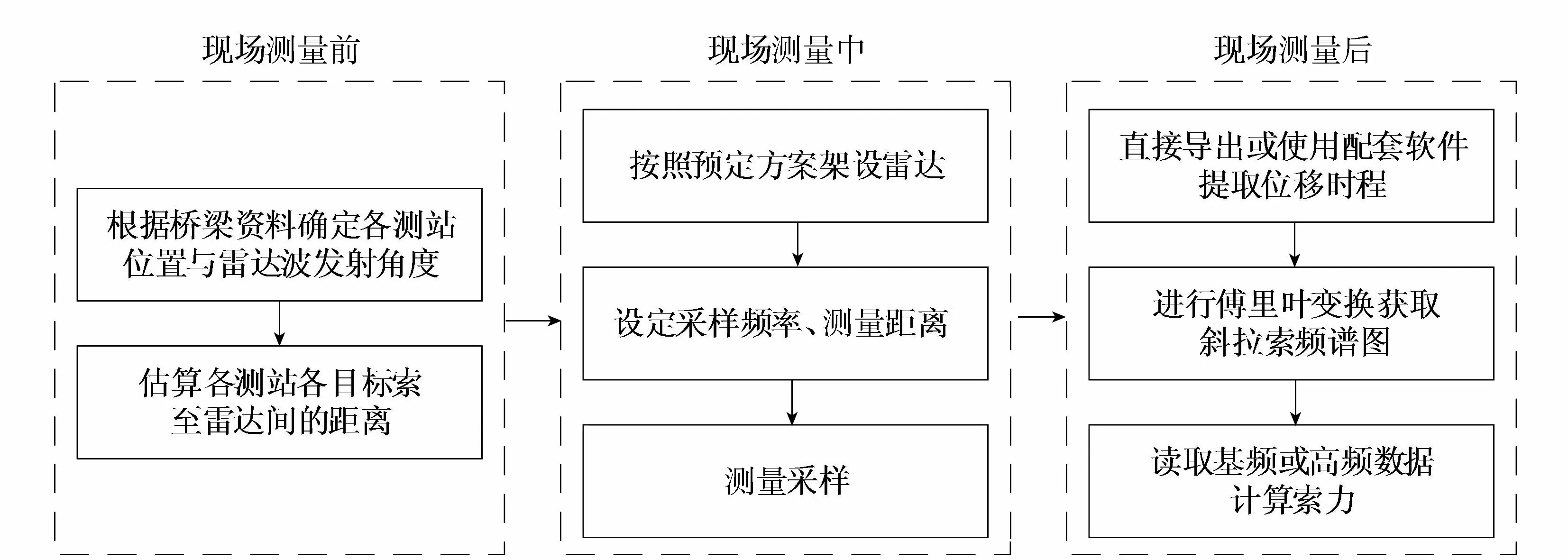
图3 基于微波干涉雷达的索力测量作业流程Fig.3 Operation flow chart of cable force measurement based on microwave interferometric radar
2 现场测量实例
以南京浦仪公路大桥为例,在成桥状态且尚未通车的条件下采用IBIS-S微波干涉雷达系统对斜拉索索力进行实桥测量,并以目前常用的DaspBCF手持索力测量仪与JMM-268接触式索力动测仪现场测量的结果作为对照,以验证IBIS-S微波干涉雷达系统索力测量结果的可靠性。
2.1 工程概况
南京浦仪公路大桥为一座双塔钢结构斜拉桥,结构整体为纵向漂浮体系,主桥跨径布置为50 m+180 m+500 m+180 m+50 m=960 m。主梁为扁平流线形分幅钢箱梁结构,其上翼缘为正交异性板结构,两幅钢箱梁采用横向联系横梁连接,桥梁全宽54.4 m,为目前国内最宽的独柱钢塔斜拉跨江大桥。斜拉索采用1 860 MPa高强度平行钢丝斜拉索,全桥共64对斜拉索,按中央双索面扇形布置,西塔斜拉索布置如图4所示,边跨斜拉索由桥塔向过渡墩依次编号为B0~B15,中跨斜拉索由桥塔向跨中依次编号为Z0~Z15。

图4 浦仪公路大桥斜拉索布置(单位:m)Fig.4 Stay cable layout plan of Puyi Road Bridge (unit: m)
2.2 IBIS-S微波干涉雷达系统
现场采用IBIS-S微波干涉雷达系统进行索力测量。IBIS-S微波干涉雷达系统由传感器单元、配套控制电脑以及供电单元三部分组成,采用SFCW技术通过发射多组连续频率的电磁波对目标物体进行测量。IBIS-S微波干涉雷达系统测量距离为1 000 m,雷达波频段为16.6~16.9 GHz(Ku波段),距离分辨率为0.5 m,动态监测精度为0.01 mm,最高采样频率为200 Hz。
2.3 测量方法
综合考虑IBIS-S微波干涉雷达系统设备的适用条件,在现场测量中采用了两种程序,分别采用不同的雷达架设位置与发射仰角。
a.测量方法一。为在一测站尽可能覆盖多根斜拉索,测量方法一中雷达架设在桥面上近桥塔一侧(图5),以30°的仰角发射波束。根据桥梁平面图进行计算,若将雷达放置于桥面与桥塔相交位置处,理想状态下B0~B8号斜拉索均能处于单独的距离单元中,可一次直接获得9根斜拉索的动态信息。

图5 测量方法一示意图Fig.5 Schematic diagram of measuring method 1
b.测量方法二。为避免桥面上栏杆、路灯、监控装置等附属设施的干扰,同时尽量保证采集到每根斜拉索中部动态信息,测量方法二中雷达架设在桥面上目标斜拉索的正下方(图6),采用较大的仰角(70°~80°)向上方发射波束。

图6 测量方法二示意图Fig.6 Schematic diagram of measuring method 2
在采用上述两种方法进行雷达采样时,雷达由于放置在桥面上,采样过程将受到桥梁环境振动的影响。对于传统加速度计,由于加速度传感器绑扎在斜拉索索体上,测量结果可有效避免桥梁梁体振动的影响。因此,为验证微波干涉雷达索力测量结果的准确性,采用DaspBCF手持索力测量仪与JMM-268接触式索力动测仪两种传统加速度计进行同步测量(图7)。
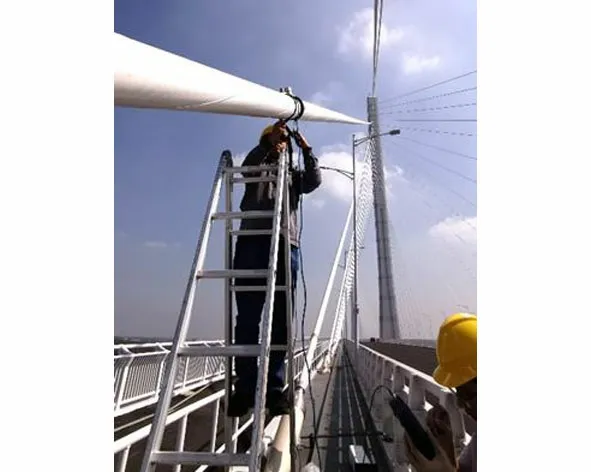
图7 传统加速度计测量Fig.7 Measure by traditional accelerometer
根据采样定理,当形变测量频率fs远高于斜拉索最高振动频率fh时(即满足fs≥2fh),采样样本中包含原始信号中的所有信息,采样样本可以不失真地还原为斜拉索的原始振动信号。因此测量中微波干涉雷达与传统加速度计均采用40 Hz的采样频率。
2.4 数据处理与结果分析
2.4.1 数据处理流程
对IBIS-S微波干涉雷达采集到的信号,采用配套的IBIS_DataViewer软件并结合MATLAB平台编程进行数据处理。以14号测站为例,该测站观测信号信噪比见图8。由于雷达信号到达斜拉索等物体后会产生散射,在雷达图像中产生雷达回波能量峰值点,根据斜拉索至雷达的距离,取目标斜拉索所在的距离单元进行频谱分析。以西塔南侧B2号斜拉索为例,该斜拉索对应的距离单元的位移时程曲线如图9所示,该位移为斜拉索在雷达视线方向上的位移投影。基于快速傅里叶变换原理对位移时域信号进行转换,得到B2号索的频谱特征,见图10。
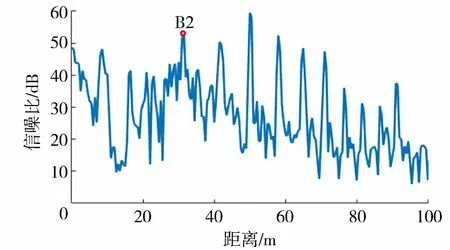
图8 14号测站观测信号信噪比Fig.8 SNR (signal-to-oise ratio) of observation station 14
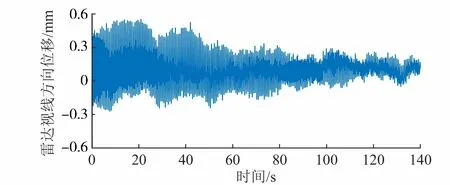
图9 B2号斜拉索雷达视线方向位移时程曲线Fig.9 Time history of displacement of Cable B2 in line of radar sight
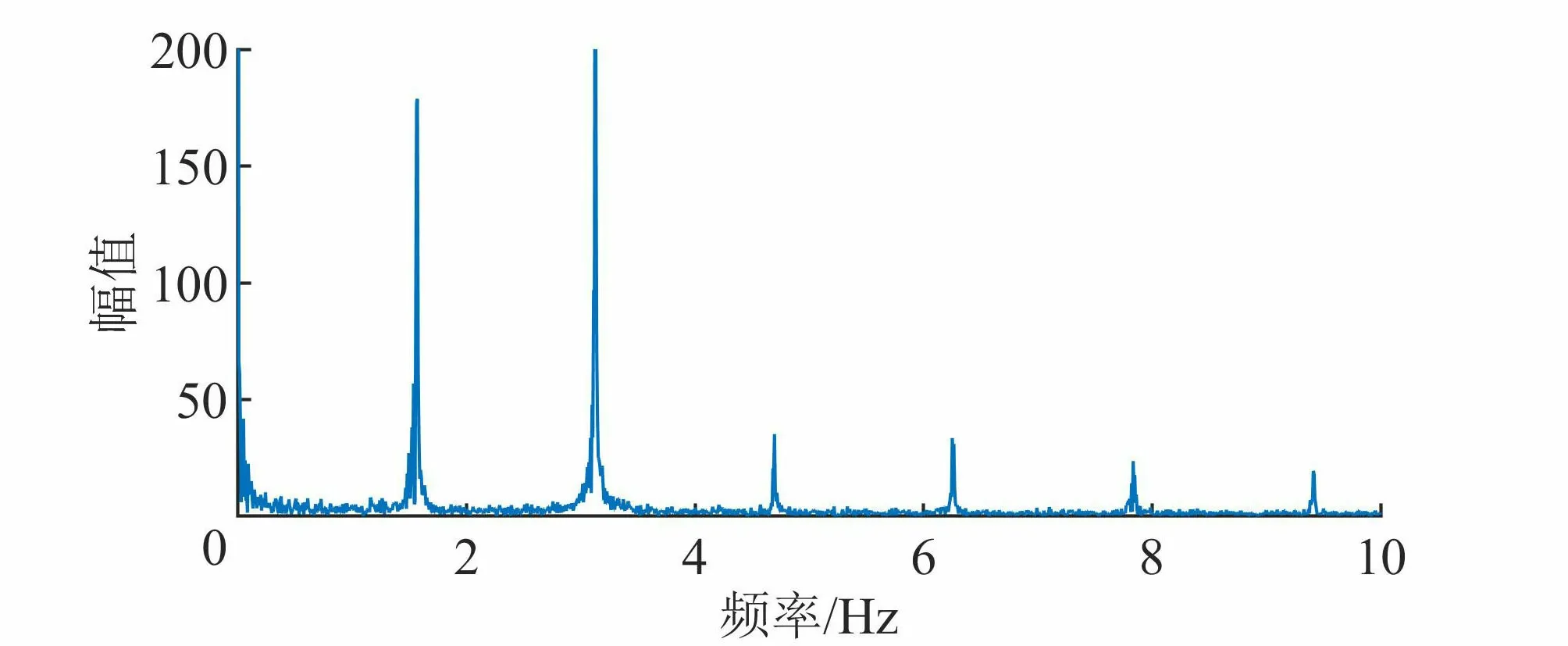
图10 B2号斜拉索频谱Fig.10 Displacement spectrum of Cable B2
在采用简化计算式(式(5))计算索力时,长索采用高阶频率、短索采用低阶频率计算能够较大幅度避免斜拉索垂度与抗弯刚度的影响[5]。图10中B2号斜拉索各阶频率呈较好的倍数关系,因此采用B2号斜拉索的第6阶频率9.410 Hz计算得到基频为1.568 Hz。结合该斜拉索的线密度51.788 kg/m及计算长度90.021 m,代入式(5)即可计算得到西塔南侧B2号斜拉索的索力值为4 129.082 kN。
2.4.2 测量结果可靠性分析
采用与前述相同的数据处理流程对所有测站的测量数据进行分析计算,结果见表1。
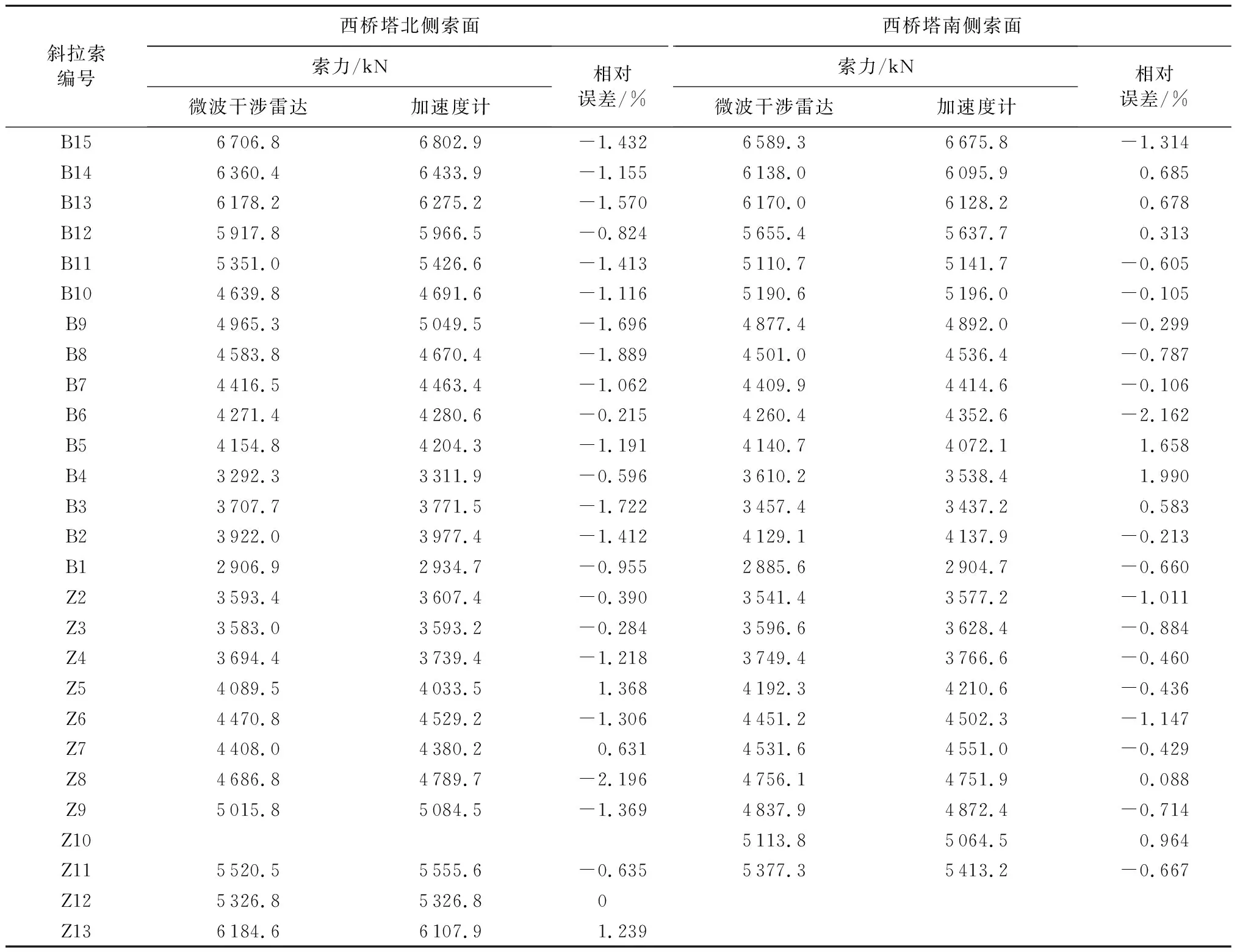
表1 索力测量结果
由表1可见,IBIS-S微波干涉雷达测得的索力与两种传统加速度计测得的索力的相对误差最大值仅为-2.196%。两类测量方法测得的索力之比(雷达测得的索力与加速度计测得的索力之比)均值为0.994 7,标准差为0.009 5,离散系数为0.009 5。两类测量方法测得的索力结果相近,相对误差较小,表明基于微波干涉雷达的索力测量方法具有可靠性,能够满足斜拉索索力测量的精度需求。
2.4.3 测量方法适用性分析
以现场测量的7号测站与15号测站为例。7号测站采用了测量方法一的测量程序,雷达架设于桥梁纵轴线附近对西塔南侧索面B5~B11号斜拉索进行测量;15号测站采用测量方法二的雷达架设方案,将雷达架设在西塔南侧索面Z0号斜拉索正下方。两测站的雷达观测信号如图11与图12所示。
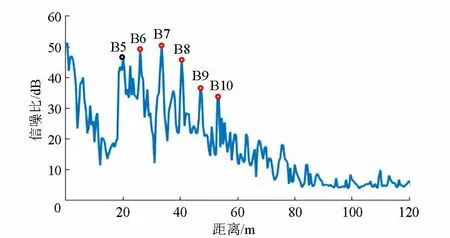
图11 7号测站雷达信号Fig.11 Radar signal of Observation Station 7
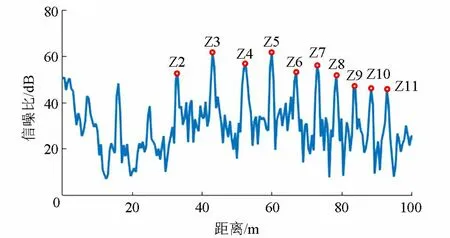
图12 15号测站雷达信号Fig.12 Radar signal of Observation Station 15
7号测站可同时测得B6~B10共5根斜拉索的振动基频,15号测站可同时测得Z2~Z11共10根斜拉索的振动基频,根据振动频率法计算的各斜拉索索力见表1。从测量结果可知,对于微波干涉雷达索力测量方法,不同的雷达架设位置并不影响斜拉索振动基频与索力的测量精度,两种测量方法均能充分发挥微波干涉雷达测量高效率、高精度的特点。
但相比测量方法二,测量方法一的雷达架设方式存在以下缺点:
a.雷达视野内存在较多桥上附属设施,如路灯、护栏、监控设备等。这些附属设施同样会散射雷达波,斜拉索的信号易被“淹没”在噪声之中。图11中,B5和B6号斜拉索对应的两个距离单元间存在一处较大噪声;随距离增加,斜拉索散射回的信号能量衰减,B10号斜拉索所在的距离单元后斜拉索的信号强度与噪声信号强度相当,斜拉索信号逐渐淹没在栏杆、路灯等产生的噪声中,导致区分困难。
b.由于IBIS-S微波干涉雷达自身距离分辨率限制,目标斜拉索所在的距离单元内易出现路灯、监控摄像头等其他物体,导致位移信息混淆,难以直接提取斜拉索的振动特性。如图13所示,7号测站中B5号斜拉索所在的第41号距离单元产生了斜拉索与灯杆的混叠信号,无法从频谱图中直接提取B5号斜拉索的基频。为避免此情况,测量方法一在测量前往往需要花费大量时间进行内业计算,以保证尽可能多的斜拉索位于单独的距离单元中。
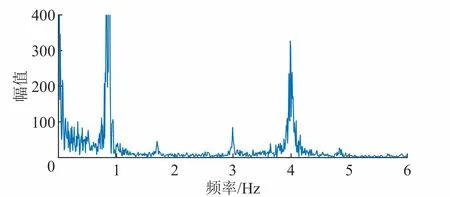
图13 7号测站第41号距离单元频谱Fig.13 Displacement spectrum of Range Bin 41 at Station 7
测量方法二采取自下向上的测量方法能有效避免上述弊端,雷达视野内仅存在待测斜拉索与极少数路灯,有利于获得波峰突出、噪声较小的雷达图像(图12),斜拉索所在距离单元更容易判断,且一次可测得的斜拉索数量往往多于测量方法一。测量方法二能在大幅提高测量效率的同时有效避免雷达信号混叠,在实桥测量中具有更好的实用价值。
综上所述,基于微波干涉雷达的斜拉索索力测量结果具有可靠性,自下向上的测量方法具有更好的适用性。此外,在实桥测量中,相比传统接触式测量方法,雷达索力测量方法具有以下优点:
a.节省人力成本,设备要求量少。全桥斜拉索测量仅需1台微波干涉雷达,1或2名工作人员即可完成测量工作。
b.测量速度快,效率高,安全便捷。无需在索体上加装传感器、电磁波反射装置以及布置专门测点,每个测站安装雷达仅需2 min,1台雷达可同时对多个目标进行测量。无须攀高设备辅助,大幅度降低了安全风险。
c.不干扰交通,适用于各种情况下的桥梁[24]。对于运营中的公路桥梁或封闭的铁路桥梁,可在人行道、非机动车道、桥塔处或桥下架设微波干涉雷达测量拉索的面外振动。对于施工或刚建成未通车的桥梁可在桥上架设雷达,不论雾天、雨天均能正常开展测量工作。
当前微波干涉雷达索力测量方法仍存在着一些不足,如对于双索面均位于桥梁轴线的桥梁或双斜拉索桥梁,微波干涉雷达受限于距离分辨率,测量效果尚不理想,需开展进一步的研究探索。
3 结 论
a.微波干涉雷达可同时测量多根斜拉索的动态响应,是一种非接触的、精度可靠且高效率的索力测量方法,且安装快捷,能够大幅提高现场索力测量的工作效率。
b.雷达架设位置会直接影响现场测量效果。在斜拉索下方架设雷达能有效规避桥面护栏与灯柱的影响。斜拉索在雷达视线方向上的间隔明显,不仅可以方便判断斜拉索编号,还能保证满足雷达距离分辨率要求,避免斜拉索之间产生信号混叠。
c.雷达波发射仰角对测量效果有一定影响。在桥面上以较大仰角发射雷达波束的方法相比以较小仰角发射雷达波束的方法更能有效规避桥上附属设施等“噪声”的影响,便于采集斜拉索中部的振动信息。
猜你喜欢
地理空间信息(2022年11期)2022-11-26 05:47:02
能源研究与利用(2022年1期)2022-03-03 07:43:08
测绘学报(2018年10期)2018-10-26 06:12:16
城市勘测(2018年1期)2018-03-15 03:37:02
电测与仪表(2016年16期)2016-04-12 00:25:32
北京信息科技大学学报(自然科学版)(2016年5期)2016-02-27 06:31:38
印制电路信息(2015年6期)2015-12-30 12:57:58
西安建筑科技大学学报(自然科学版)(2014年1期)2014-11-12 13:03:36
振动、测试与诊断(2014年6期)2014-03-01 01:14:55
振动、测试与诊断(2014年5期)2014-03-01 01:14:42
