
智能网联汽车自动驾驶仿真测试技术研究综述
2022-11-22 07:23康诚严欣唐晓峰
时代汽车 2022年22期
康诚 严欣 唐晓峰
中汽研汽车试验场股份有限公司 江苏省盐城市 224145
1 引言
目前智能网联汽车正处于从技术研发层面逐渐转向测试应用及商业化过渡的关键阶段。包含实际应用需求的道路测试及示范测试也已成为智能网联汽车产业链中当前最主要的共性需求。探求车路协同智能网联自动驾驶汽车智能化,数字化,高效测试发展的最优化道路和体系引导成为了目前智能网联驾驶车辆行业内发展中必不可少的步骤。
智能网联汽车自动驾驶技术的研究开发与大规模产业化的过程可分成五个阶段:
(1)实验室模拟测试阶段,包含模型在环测试、软硬件在环测试、车辆在环测试等封闭在实验室内的研发测试阶段;
(2)封闭测试场测试阶段:在由人为设置的交通场景与动静态交通流混合下的受控场地内的研发测试阶段;
(3)开放道路测试阶段:在包含社会车辆、交通设施、行人等交通参与者在内参与的受限道路(限制时间与指定路段)上的研发测试阶段;
(4)开放区域测试阶段:在包含社会车流、交通设施、行人等交通参与者在内,且具备实际运行意义区域内的研发测试阶段;
(5)规模产业化阶段:结合智慧城市的建设,开展自动驾驶示范应用及规模化商业运营落地[1]。
2 自动驾驶仿真测试的意义
自动驾驶汽车在真正示范应用及商业化运营之前,需要在封闭场地和开放道路经过大量的道路测试才能达到使用要求,此测试过程需要达到百万级公里的实车测试对控制算法进行反复练习,如采用实际道路测试来优化自动驾驶算法,耗时较长的同时,人力物力成本较高。并且测试过程也会受到测试的区域范围、政策法规、气象环境、复杂交通流等多种因素的约束,同时实际道路测试过程中有一定的风险,易产生安全隐患。
因此,基于自动驾驶场景库的仿真测试是解决自动驾驶汽车的研发测试中各项问题的主要技术手段。自动驾驶系统仿真测试与传统汽车的整车或零部件试验有所区别,主要是通过软件中算法开发、模型建立、场景设置进行模拟仿真测试。
仿真测试采用的模型通常是广泛应用在汽车开发过程当中的V型开发测试模型,主要包括以系统建模、设计、模型在环为前半V型纵深进行设计开发阶段的测试和经由软件在环、硬件在环等测试形成后半V型的测试过程。V型开发模型的工作流程主要是研发团队进行不同阶段的开发与测试团队编制对应的测试用例要保持同步,在开发阶段完成后立即进行测试。基于此,即便无完整产品样件,也可开展集成测试、系统测试等相关测试。通过仿真测试验证使自动驾驶系统在开发过程中快速高效的发现和解决开发过程中的问题。
3 自动驾驶仿真测试流程
自动驾驶车辆的核心部件主要是传感器、控制器和执行器,真实场景测试中,驾驶人员在不同类型的道路、交通和气候等环境下驾驶车辆开展测试。对比真实场景测试,仿真测试就是模拟真实的驾驶环境(如道路、交通、气候)开展测试,因此会对照真实的驾驶场景搭建虚拟场景,也就是仿真测试平台,仿真平台一般包括仿真框架、物理引擎和图形引擎;其中仿真框架是平台软件平台的核心,支持传感器仿真、车辆动力学仿真、交通环境仿真、云仿真,故自动驾驶仿真测试平台通常包含交通场景模块、传感器模块、车辆动力学模块、测试管理模块四部分。如图1所示:
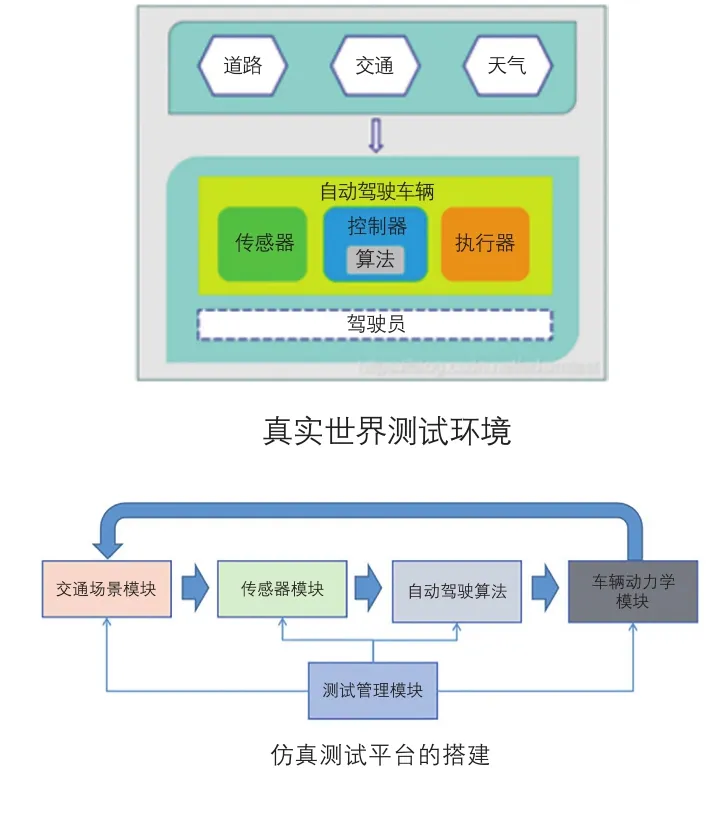
图1 自动驾驶仿真测试平台构成
由图1可知,交通场景模块用于模拟车辆行驶时的外部交通场景;传感器模块用于模拟车辆上安装的各类传感器,进而获取交通场景的实时状态;车辆动力学模块用于模拟车辆本身对自动驾驶算法控制的响应,特别是对车辆加速、制动和转向的响应。测试管理模块,负责管理上述三个模块组成的仿真测试环境,保证仿真测试的效果和效率满足要求。四大模块构成的仿真测试平台既可以对测试流程进行管理,也可以对测试过程中产生的数据进行管理[2]。
完整的自动驾驶仿真测试可以分为仿真工具开发、仿真工具集成、测试场景开发和仿真测试执行等工作,如图2所示。
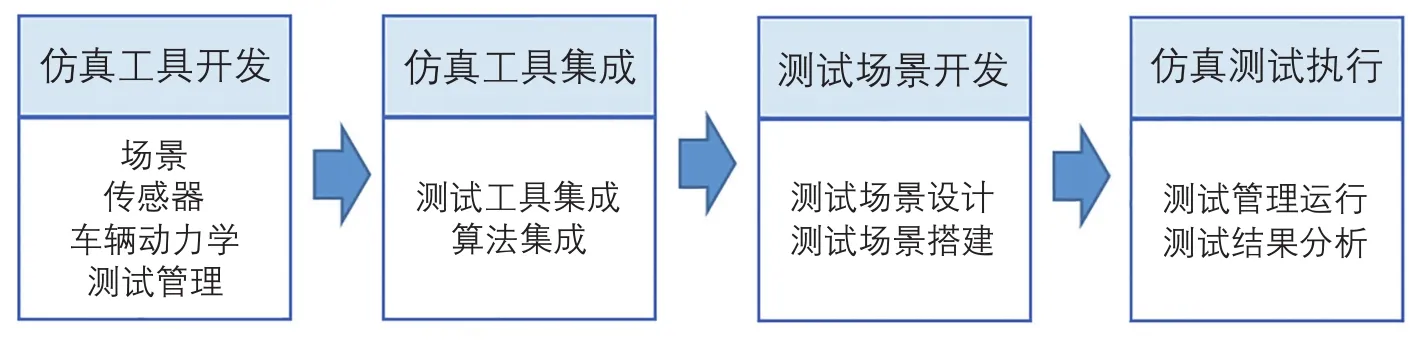
图2 自动驾驶仿真测试流程
自动驾驶仿真测试流程主要分为以下四项:
(1)仿真工具开发
直接开发仿真工具有难度,且不同仿真工具内模块的功能之间存在一定的分隔,目前仿真工具一般由专业仿真软件公司开发。比如PreScan常用于场景和传感器建模仿真,CarSim常用车辆动力学模拟仿真,ECU-TEST常用于测试管理与分析。
(2)仿真工具集成
仿真工具集成主要包含两块工作:一是基于用户测试需求,利用确定的测试工具,将测试需求集成完成可靠的测试环境;二是利用仿真测试环境与被测算法集成,形成测试过程的闭环。
(3)测试场景开发
测试场景开发重点在于确保仿真测试的场景覆盖度,首先针对自动驾驶算法的设计运行域(ODD)详细而进行系统详细地测试场景设计,并充分考虑路况、道路车辆的位置和运动状态、传感器感知范围和自身车辆状态等各方面的影响,测试场景的设计过程是需要在仿真环境下进行。
(4)仿真测试执行
仿真测试执行包含两块工作:一是对测试场景库进行维护,并针对不同算法或功能合适的测试场景进行运行测试;二是在测试完成后,整理并提供清晰的测试报告,测试报告中主要是测试结果的统计数据,统计数据主要应用与后期的算法改进[3]。
4 自动驾驶仿真测试方法
基于仿真模型设计方法处于不同的阶段划分,可分为采用MIL/SIL/PIL/HIL(MIL,Modelin the Loop:模型在环测试;SIL,Softwarein the Loop:软件在环 测 试;PIL,Processorin the Loop:处理器在环测试;HIL,Hardwarein the Loop:硬件在环测试)等测试方法,有效的对仿真模型设计的嵌入式代码进行测试验证。如被测试对象是尚处于开发阶段的算法,测试方法采用MIL/SIL测试即可;如被测对象是在实际车辆应用的控制器,为及时发现问题,需要使用HIL设备提前进行测试。仿真测试常用的工具有的Panosim、CarSim、CarMaker、PreScan和 Pro-SiVIC 等 等[4]。 对 于 MIL、SIL、PIL、HIL的对比分析如表1所示:

表1 四种驾驶仿真测试方法对比
5 自动驾驶仿真测试行业分析
目前参与自动驾驶仿真测试的市场主体主要有:科技型公司、自动驾驶解决方案供应商、科研院所、仿真软件企业、智能网联测试示范区运营单位。由于每个市场主体在自动驾驶仿真方面的技术基础和目标各有不同,因此在主导自动驾驶仿真研发及合作应用方式呈现不同特点。
科技型公司在仿真方面起步相对较晚,在汽车功能探索方面经验较少,但优点是具备大数据优势,软件开发能力强,科技型公司进行仿真软件及平台的研发,目标是将研发成果渗透到智能网联汽车行业,建立属于自身的数据平台,利用数据的开发应用拓展自身的业务。目前代表性自动驾驶仿真科技公司主要有华为自动驾驶云服务HUAWEI Octopus(简称华为八爪鱼)、百度自动驾驶仿真系统AADS、阿里混合式仿真测试平台等。
自动驾驶解决方案供应商主要针对客户需求研发定制化的仿真软件,都有自身仿真测试软件。自动驾驶解决方案商主要为初创公司,有较强的融资能力和创新人才,在自动驾驶仿真测试方案解决方面具有持续且较强的创新能力。自动驾驶解决方案商,如Waymo、文远知行,小马智行、momenta等。
科研院所主要应用自动驾驶仿真测试进行前瞻性探索研究,通过自动驾驶仿真与物联网、云计算等先进技术相结合,对智能网联汽车车路协同核心系统中各项关键信息的感知、分析、挖掘,产出理论与应用成果。国内从事自动驾驶仿真测试研究的科研院所主要包括:中国汽车技术研究中心、清华大学、吉林大学、东南大学、长安大学等。
智能网联测试示范区运营单位主要是应用自动驾驶仿真测试建设虚拟测试场,基于数字孪生技术和在环测试概念建立可实现多级在环的虚拟测试平台。利用仿真技术与车辆群体和信息交互相结合,利用计算机技术,通过数学、物理或几何计算方式,进行多目标群系统的驾驶行为和过程的仿真,建设可实现真实场景复现的交通流及多自由度动力学仿真,满足多种工况的自动驾驶测试平台,为自动驾驶产品开发及仿真测试完成数据和技术积累。智能网联测试示范区主要有:国家智能网联汽车(上海)试点示范区、国家智能汽车与智慧交通(京冀)示范区等50余家国家与地方级智能网联汽车测试示范区。
6 结语
自动驾驶仿真测试复制快速、低成本、安全、高覆盖度的道路测试,流程从工具的开发、集成、场景开发、再到测试的分析评价,按照不同测试阶段及测试内容,采用不同的测试方法,这一套合理的完整的仿真体系能加速整个系统的开发和测试并提供正反馈,伴随着市场主体的不断扩大,仿真测试的真实性和有效性也将持续应对挑战,但随着自动驾驶产品开发测试运营一体化的发展,未来自动驾驶仿真运用将会越来越真实有效。
猜你喜欢
中国交通信息化(2022年9期)2022-11-19
学生天地(2020年5期)2020-08-25
电子制作(2019年11期)2019-07-04
科学与财富(2019年17期)2019-04-17
汽车观察(2018年12期)2018-12-26
汽车观察(2018年10期)2018-11-06
计算机教育(2017年5期)2017-05-31
小天使·一年级语数英综合(2017年3期)2017-04-25
莫愁(2017年9期)2017-04-07
汽车博览(2016年9期)2016-10-18
