基于PLC的多种工作方式机械手搬运系统设计
2022-11-21 13:06:24何光明帅江华
技术与市场 2022年11期
何光明,帅江华
(上饶职业技术学院,江西 上饶 334109)
1 设计需求
随着我国物流行业发展规模不断壮大,物流企业对货品自动化搬运的作业需求量也不断增多,传统模式下,大多数物流企业主要依靠半自动化机械手系统完成货品的搬运作业,存在自动化程度低、人机交互性不强、工作方式单一等问题,制约着物流企业搬运作业效率的提升。基于此,综合应用PLC、组态和机械手控制技术设计一款全自动化、多工作方式和人机交互性更强的物流货品搬运系统,为解决物流企业的货品自动化搬运问题提供全新的方案。
2 系统结构功能设计
2.1 结构设计
系统机械结构设计示意图如图1所示,整个机械手由电磁阀组、气路模块、限位传感器和PLC联合控制,选用了S7-200型PLC的I0.1~I0.4 4个输入地址,其中,I0.1和I0.2分别与下限位和上限位传感器连接,I0.3~I0.4分别与右限位和左限位传感器连接;输出选用了PLC的Q0.0~Q0.4 五个地址位,分别与下降、加紧、上升、右行、左行电磁阀线圈连接。实际工作时,在PLC程序的控制下,机械手可在A点抓取待搬运的物流货品,按照设计好的路线搬运至B点,当货品被夹紧时,Q0.1被置位,当货品被松开时,Q0.1被复位。在机械手部件的选取上,选用SAR12-1400型摆臂冲压机械手。
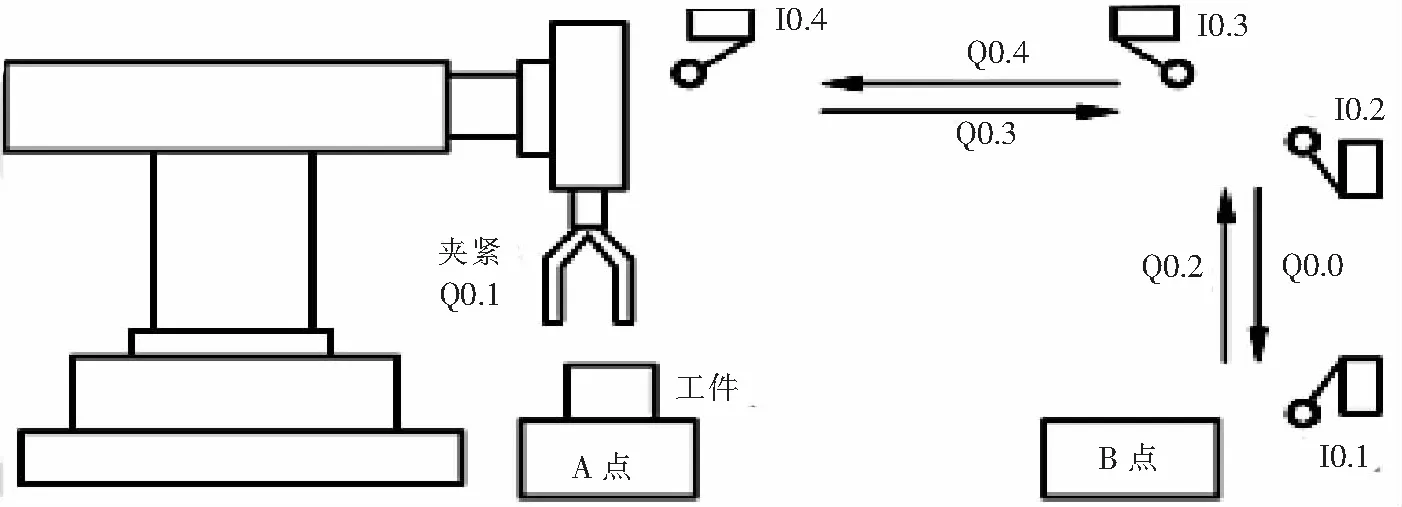
图1 系统结构设计示意图
2.2 功能设计
该系统的功能操作面板设计如图2所示,根据系统预设的自动、手动、回原点等多种工作方式,在功能操作面板上设计了相应的操作按钮。其中,I2.0~I2.4分别为手动控制、回原点控制、单步控制、单周期控制、自动连续控制与PLC外部输入地址的连接点,I0.5~I1.2分别为手动上升、左行、松开、下降、右行、夹紧按钮与PLC外部输入地址的连接点,I2.6为系统启动按钮、I2.7为系统停止按钮。此外,为保证在紧急情况或系统发生故障时,能够快速可靠地切断负载电源,在功能操作面板上设置了“负载电源”和“紧急停车”按钮,当PLC运行后按下“负载电源”按钮,外部负载的KM线圈会通电并自锁,为外部负载提供交流电信号,当出现紧急情况或系统发生故障时,可按下“紧急停车”按钮断开外部负载上的电源,以起到保护控制的作用。
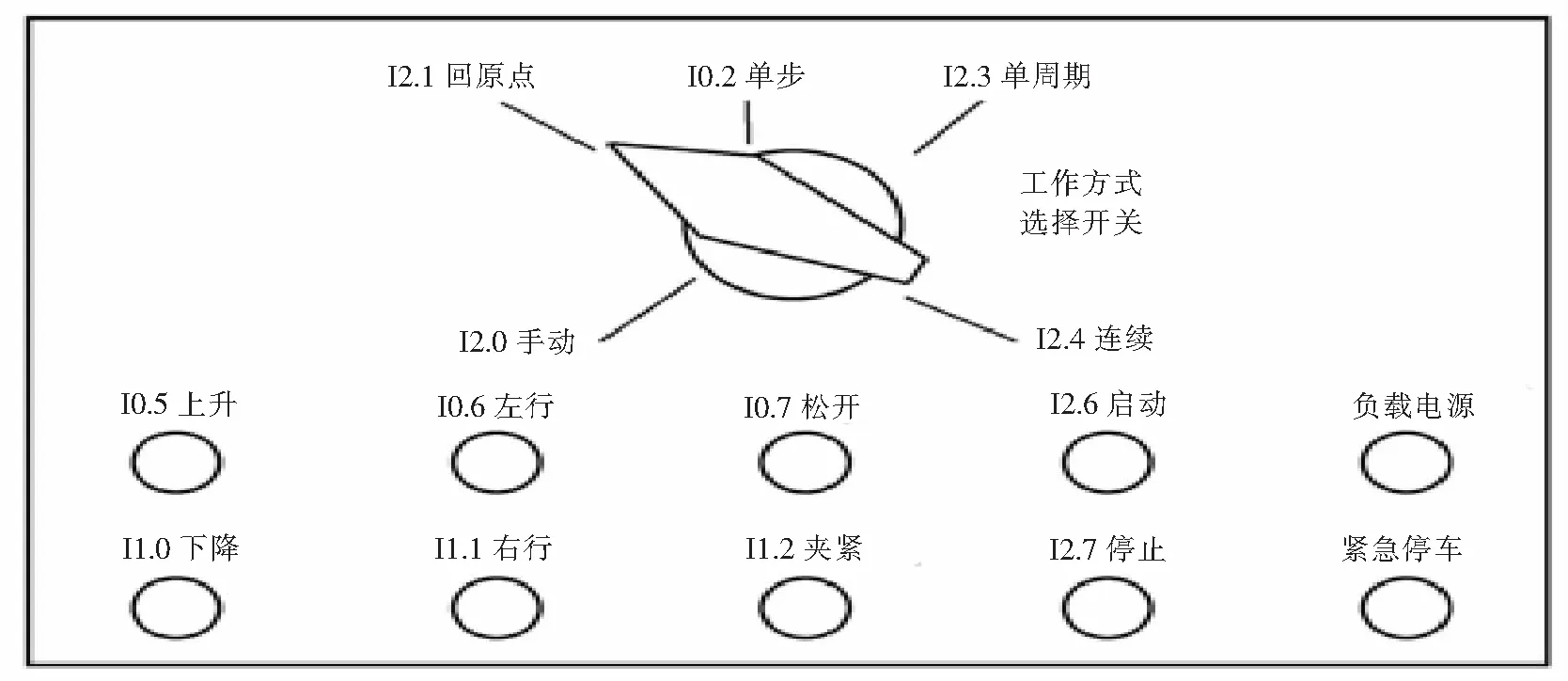
图2 系统功能操作面板设计图
3 系统软硬件设计
3.1 系统硬件接线设计
该系统的硬件接线图如图3所示,采用西门子S7-200 CPU 226型PLC作为硬件控制核心,按照如图所示分配输入和输出地址端口,按照物流搬运现场作业需求,设有手动、自动、回原点等多种工作方式,各方式的具体工作流程设计如下。
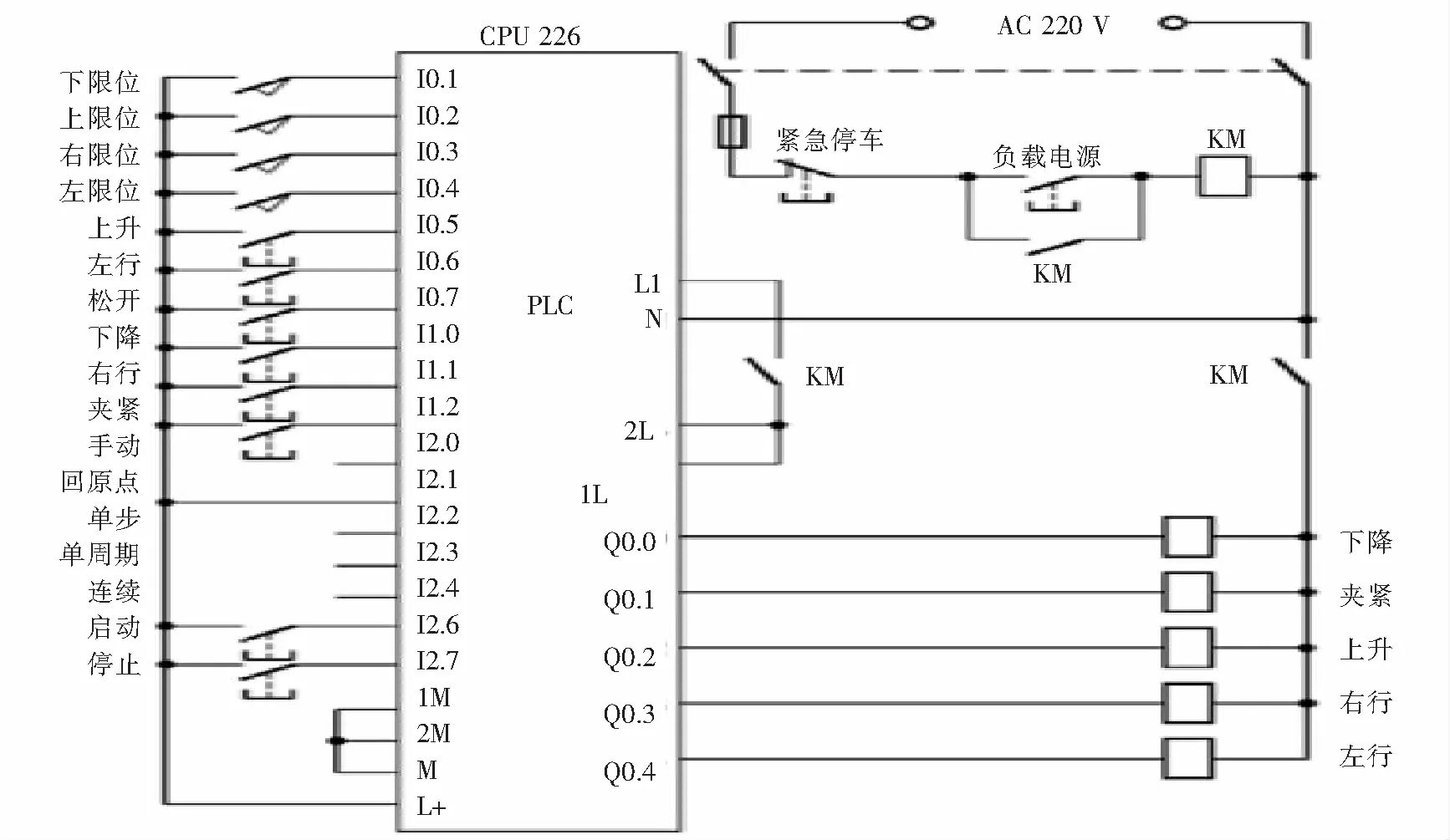
图3 系统硬件接线图
1)手动方式。应用I0.5~I1.2这6个按钮控制机械手上升、下降、左行、右行、夹紧和松开货品物料的单步操作,适用于针对物流货品搬运位置、位移的精准调整。
2)自动方式。当机械手处于原点位置时,按下启动按钮I2.6,机械手将从原点开始,按照“下降—抓取货品—上升—右行—下降—放开—上升—左行”的规律循环进行物流货品搬运自动作业。
3)单周期方式。当工作方式选择按钮调至单周期工作方式时,按下启动按钮I2.6后,机械手能够执行一个单周期搬运物流货品作业,之后返回并停留至原点位置。
4)回原点方式。当机械手没有处在原点位置时,I2.1为高电平,此时按下启动按钮I2.6时,机械手能够返回到原点位置,之后等待自动、手动或单周期运行指令。
3.2 系统软件设计
该系统程序采用梯形图语言编写,按照顺序功能流程的思路为主程序、公用子程序、手动子程序、自动子程序(包括循环连续搬运程序、单周期搬运程序)。其中主程序编写中,以SM0.0作为公用程序的调用指令,当系统上电后,自动进入到公用程序,之后由用户选择搬运货品工作方式,再执行相应的搬运作业流程。为保证系统安全运行,在公用程序中设置了一些联锁程序,本系统的主程序和公用程序如图4所示。

图4 系统主程序及公用程序
3.3 系统组态设计
为提升系统应用的交互性,应用MCGS软件和TPC7062K触摸屏设计组态子系统。整个组态界面主要由机械手模块、指示灯模块、按钮模块3部分构成,其中,机械手模块调用了MCGS中的机械手空间、矩形控件等,并编写了动作脚本程序;指示灯模块选取“指示灯2”控件,并与PLC的I0.5~I1.2地址位建立起逻辑变量关系,用于动态地指示机械手的搬运动作;按钮模块选取“标准按钮”控件,并与I0.5~I2.7地址位建立起逻辑变量关系,用户可在触摸屏上按下相应的按钮,对系统进行远程触摸控制,系统的组态界面如图5所示。
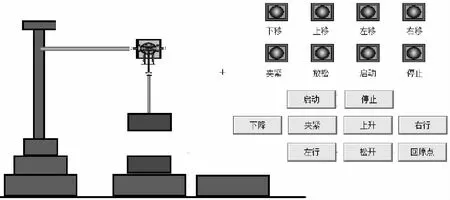
图5 基于PLC的多种工作方式机械手搬运系统组态设计界面
4 系统应用测试
系统设计并装配完成后,应用于某物流企业货品搬运现场进行作业测试。测试指标包括故障次数、平均响应时间、搬运成功次数。测试方案为:应用系统连续进行100次、300次、500次物流货品的抓取和搬运作用,收集测试指标相关的数据,并进行统计整理,以验证本系统的应用有效性和可靠性,具体的测试数据如表1所示。
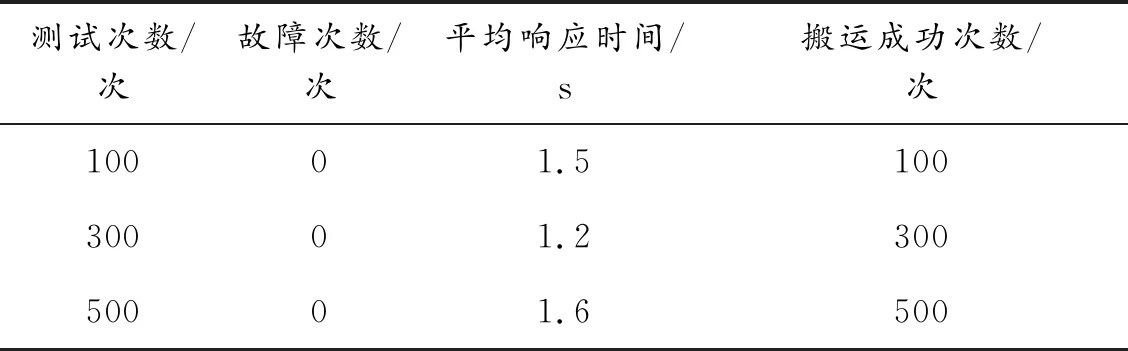
表1 系统应用测试统计表
5 结语
对系统运行功能进行测试的结果可知:分别进行100次、300次和500次物流货品搬运作业过程中,系统故障发生率为0%,搬运成功次数为100%,平均响应时间约为1.3 s,说明本系统具有良好的作业特性,各项指标均能满足物流企业货品自动化搬运的需求,具有良好的适应性、稳定性、可靠性和应用性。此外,通过测试现场的人机交互应用发现:所设计的组态子系统能够实现对货品搬运的远程交互控制,大大降低了人为硬件控制对系统元件的损耗率,有利于物流企业节约维护和更换机械搬运手系统的成本。
猜你喜欢
青少年科技博览(中学版)(2023年5期)2023-06-26 09:39:12
科学技术与工程(2022年26期)2022-11-01 05:40:14
中国船检(2021年11期)2021-12-04 14:02:26
现代苏州(2019年16期)2019-09-27 09:31:02
语言与文化论坛(2019年3期)2019-04-13 02:25:04
湖北文理学院学报(2017年2期)2017-04-16 05:09:06
通信电源技术(2016年1期)2016-04-16 04:57:29
燕山大学学报(2015年4期)2015-12-25 02:20:01
系统工程学报(2015年5期)2015-02-28 19:54:16
机电信息(2015年3期)2015-02-27 15:54:53