
北斗系统C波段导航信号调制方式及性能评估
2022-11-19 06:53倪育德刘瑞华陈万通
系统工程与电子技术 2022年12期
倪育德, 邹 玲, 刘瑞华,*, 陈万通, 秦 哲, 王 凯
(1. 中国民航大学电子信息与自动化学院, 天津 300300; 2. 中国民航大学中欧航空工程师学院, 天津 300300)
0 引 言
当前L波段卫星导航服务信号众多,导致频谱重叠严重,信号间频率协调和兼容的难度越来越大[1]。基于频谱资源的不可再生性,探索卫星导航服务新频段迫在眉睫[2-3]。
在2000年世界无线电大会上,国际电信联盟(International Telecommunication Union,ITU)将C波段中的5 010~5 030 MHz划分为导航服务下行信号波段[4],该波段仅有20 MHz带宽,对波段外的功率发射有着非常严格的限制。相比于L波段,C波段最显著的优势就是频谱污染少,电离层延迟小(约为L波段的1/10[5])。C波段导航的提出不仅能在一定程度上缓解当前L波段信号拥挤问题,更重要的是,它能提供非常精确的单频服务[6],满足高精度全球导航卫星系统(global navigation satellite system,GNSS)需求,解决关键基础设施中L波段的脆弱性问题,从而增强整个GNSS服务的稳健性,这使研究和开发C波段导航资源受到越来越多的重视。如何在充分利用C波段20 MHz带宽资源的同时,兼顾信号的兼容性约束和导航性能,就成为C波段导航系统关注的焦点[7]。
关于C波段卫星导航系统的研究,美国和欧洲早在1998—2004年间就开展了大量工作,其中Galileo研究小组就C波段导航的可行性和潜在优势进行了较为全面的研究[5,8],信号体制的设计工作也相对透明,并于2008年提出将高斯最小频移键控(Gaussian minimum shift keying,GMSK)作为C波段候选导航信号[9]。从Galileo研究小组成员公开发表的文献来看,除GMSK信号外,包括升余弦(raised cosine,RC)和最小频移键控(minimum shift keying,MSK)等在内的众多信号都曾被列为C波段候选导航信号[10-12],但RC信号时域波形不具备恒包络特性,MSK又无法满足C波段严格的兼容性约束,GMSK信号虽然具有较好的频谱抑制能力,但高斯滤波器的引入使接收机处理的复杂度增加,且无法实现跟踪性能的最优化。这些研究成果为北斗卫星导航系统C波段导航信号的设计提供了借鉴。
2012年清华大学朱亮等人针对北斗系统C波段信号设计问题,提出了基于椭圆球面波函数(prolate spheroidal wave functions,PSWF)的信号波形设计方案[7];2016年上海交通大学的刘美红提出了一种可用于C波段导航的改进型二进制编码符号调制(minimum shift keying-binary code symbol,MSK-BCS)技术[13];2018年哈尔滨工程大学的孙岩博提出将QM2RC(10)且h=0.5的连续相位调制(continuous phase modulation,CPM)信号作为北斗C波段候选信号[14];2018年华中科技大学的夏轩提出了一种基于相位调制的高谱效恒包络调制技术[15],通过将I、Q支路相对时延和码片波形进行联合优化来降低信号带外功率。
综上所述,不同于L波段相位不连续的矩形调制信号,面对频带资源受限的C波段,国内外学者都将目光聚集在恒包络相位连续的调制方案上。相位连续信号的频谱更紧凑,功率谱主瓣能量高,旁瓣衰落特性好,对同频段其他信号的干扰更小。最典型的代表就是MSK和GMSK,这二者均为CPM的特例,但频谱效能却不是最优的[14]。
2020年海军航空大学的杨大伟等人对CPM基带调频脉冲信号进行了重新选择,将PSWF引入CPM。研究表明,基于PSWF的CPM(CPM based on PSWF,CPM-PSWF)信号的频谱效能和频带利用率较传统CPM调制信号更高[16-18]。CPM-PSWF信号的频谱性能无疑与C波段导航信号严格的兼容性约束要求十分契合,若将CPM-PSWF信号应用于频带资源受限的C波段,就有可能满足C波段导航信号期望的带外辐射功率,获得较MSK和GMSK信号更好的导航性能,而这种探索目前未见相关的公开报道。
本文结合C波段特性及CPM-PSWF信号优良的频谱性能,探索性地将CPM-PSWF调制应用于C波段导航,并对其基础导航性能指标,如兼容性、码跟踪精度、抗多径性能进行评估,筛选出“QM2PSWF(10)C=6”且h=0.5的CPM-PSWF信号。该信号带外衰减较快,频谱泄露较少,有助于邻频信号在有限频带内更好地相互兼容,同时在码跟踪精度与抗多径性能方面,较当前C波段候选导航信号更具竞争力,为北斗导航系统C波段导航信号调制方式提供了新选择。
1 C波段导航信号选取的主要原则
C波段频率资源划分情况如图1所示。

图1 C波段频率资源划分
根据ITU规定,位于5 010~5 030 MHz波段内的导航服务属于次要服务,为了不对工作在5 030~5 150 MHz的微波着陆系统(microwave landing system, MLS)造成有害干扰,C波段下行导航信号在MLS波段内任意150 kHz的功率通量密度值(power flux density, PFD)不得超过-124.5 dBW/m2[19-20]。此外,ITU在2012年10月的报告文件中给出了评估MLS和GNSS信号相互干扰的方法,以及为避免MLS信号对GNSS信号接收机产生有害干扰,所需的安全地理间隔[21]。而相比MLS,位于4 990~5 000 MHz的射电天文业务(radio astronomy service, RAS)对外界电磁干扰更为敏感。由于射电天文台的台址选择只能有效屏蔽地面无线电信号的干扰,对来自太空GNSS信号产生的影响则无法有效避免,ITU给出了GNSS信号与RAS的兼容性分析评估[22-23],建议工作在5 010~5 030 MHz频段内的任何对地静止轨道卫星系统,在RAS的10 MHz频段内产生的PFD值在任何射电天文台处满足[24]:
PFDMAX[dBW/m2]=-171-X
(1)

(2)
(3)
式中:Nsat为射电天文望远镜天线波束内所能观测到的最大可见星数。
由于射电望远镜的波束宽度非常窄,即使在最糟糕的情况下Nsat值也不会很大,假设Nsat=10,则C波段下行导航信号在RAS波段内的PFD值不得超过-196.5 dBW/m2[6]。
此外,Galileo系统上行信号已经占用5 000~5 010 MHz波段[3],此波段与下行导航服务波段相邻,频谱干扰无法避免,这就要求C波段导航信号功率集中在频带中心,保证信号具有较少的频谱泄露和较低的带外辐射。降低信号带外辐射一般有两种途径:一种是对发射信号使用高阶滤波器滤波,但这会带来额外的插入损耗和较大的群时延,并使信号波形质量恶化且不稳定;另一种是从信号设计层面来抑制信号带外辐射功率,这不但能降低星载滤波器的设计要求,对生成的导航信号质量也具有积极影响。兼容性作为C波段导航信号设计最基础的指标,相比其他导航性能指标具有最高优先级。
而对于导航系统而言,其测距性能和定位精度也至关重要,这也是信号调制方式优化的关键目标。信号功率若是集中在频带中心,就不可避免会削弱信号的高频分量,从而降低码相位跟踪精度,对信号的抗多径性能也会带来不良影响。因此,选取C波段导航信号时,需要在兼容性和定位精度之间权衡,根据实际情况做出取舍。
2 CPM信号及功率谱特性
2.1 CPM-PSWF信号实现
CPM是一类参数可配置调制方案的总称,具有包络恒定、相位连续、功率和频带利用率高等优势,尤其适用于采用非线性功率放大器的卫星导航系统[25-27]。它把数字信息加载到相位上,确保相位是时间的连续函数,在数字通信中得到广泛应用。
CPM信号的通用表达式[28]可写为
(4)
式中:E为符号能量;T为信号周期;fc为载波频率;φ0为初相;α为M进制的信息序列;φ(t,α)为相位信息。
φ(t,α)通常表示为
(5)
式中:αi∈{±1,±3,…,M-1},M为进制数;h为调制指数;q(t)是相位脉冲函数,有时也称为响应函数。
q(t)是连续单调函数:

(6)
式中:L为关联长度,当L=1时称为全响应,L>1时则称为部分响应。
q(t)也可以表示为频率脉冲函数g(t)的积分形式

(7)
虽然g(t)是不连续的,但对它的积分q(t)却是连续的,这也决定了调制信号φ(t,α)相位的连续性。
常用的CPM基带调频信号主要包括矩形脉冲、升余弦脉冲和高斯型脉冲,通过选择不同基带调频信号就能产生不同的CPM信号,且g(t)时域波形越光滑,对应的CPM信号频谱特性越好。例如,当M=2且h=0.5时,若g(t)为矩形脉冲信号,产生的全响应CPM信号为MSK;采用RC脉冲信号的全响应CPM信号则称为正弦频移键控(sinusoidal frequency shift keying,SFSK),其频谱滚降特性优于MSK。而部分响应CPM调制技术中,应用范围最广的无疑是GMSK,它在MSK调制器前增加了一个高斯低通滤波器,进一步压缩MSK信号旁瓣能量,减少带外辐射功率。但对于GMSK信号而言,频带效率和符号干扰这两个指标无法同时得到满足,因为GMSK信号性能与高斯滤波器的3 dB带宽和码片宽度的乘积有关,乘积越小,信号间符号干扰越大,旁瓣信号功率越低。
频率脉冲信号的基础特性在很大程度上影响了CPM信号的性能。在PSWF信号被证明具有最佳时频能量聚集性之前,人们一直认为高斯函数是能量聚集性最佳的函数。因此,若将PSWF信号作为CPM基带调频脉冲信号,有望进一步提高CPM调制信号的频谱性能,以适应C波段严格的带外兼容性需求。
PSWF是具有最优时频能量聚集性、时间带宽积灵活可控性、完备性、双正交性、时域奇偶对称性等优良基础特性的一类信号[29],可以解决“函数在时域上集中分布同时频域上能量最大化地集中在有限带宽内”的问题[30],由如下积分方程表示:
(8)
式中:Ω为角频率;φ(t)是在[-T/2,T/2]上集中分布而频域带限于[-Ω,Ω]的PSWF信号;λ为拉格朗日乘法因子,表示能量集中度;C=TΩ称为时间带宽积,表示系统设计的自由度。
式(8)表明,一个持续时间为T的脉冲信号φ(t),通过理想低通滤波器h(t)后输出ξφ(t),即输出信号对脉冲信号φ(t)本身衰减了ξ倍,ξ值越接近1,说明滤波器的输出越接近输入[31]。
为方便表述,将式(8)写为
(9)
式中:ξ(0≤ξ≤1)为衰减因子,表示能量集中度;φ(t)是椭圆球面波函数。
将脉冲持续时间T进行N点采样,即可将式(9)离散化
(10)

将式(10)展开,可得如下矩阵方程:
ξΦ=HΦTs
(11)
令

(12)
则
λΦ=HΦ
(13)
式中:H为实对称矩阵;λ为H的特征值;Φ为H的特征向量。
将式(13)展开可得

(14)
通过对矩阵H(N+1)×(N+1)特征值分解可得到N+1个特征向量,特征值按照从大到小排序λ0>λ1>…>λN,则对应特征向量Φ=(Φ0,Φ1,…,ΦN)为各阶PSWF波形,最大特征值λ0对应的特征向量Φ0为0阶PSWF脉冲。
图2~图4分别展示了0~3阶PSWF时域波形、自相关函数和功率谱密度,它们的能量集中度分别为0.981 4、0.752 9、0.247 1和0.025 3,表明0阶PSWF波形具有最大的能量集中度。由图3和图4可知,随着PSWF阶数的增加,自相关函数曲线逐渐陡峭且主峰渐窄,说明信号具有更好的码跟踪性能,但PSWF阶数的增加却会导致信号功率谱旁瓣迅速展宽,频谱泄露严重。因此,本文选择能量集中度高且带外抑制特性好的0阶PSWF作为CPM基带调频脉冲信号。
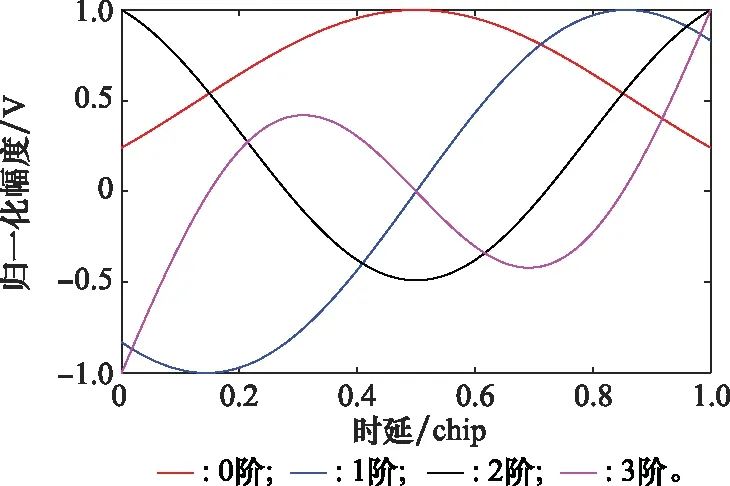
图2 PSWF时域波形
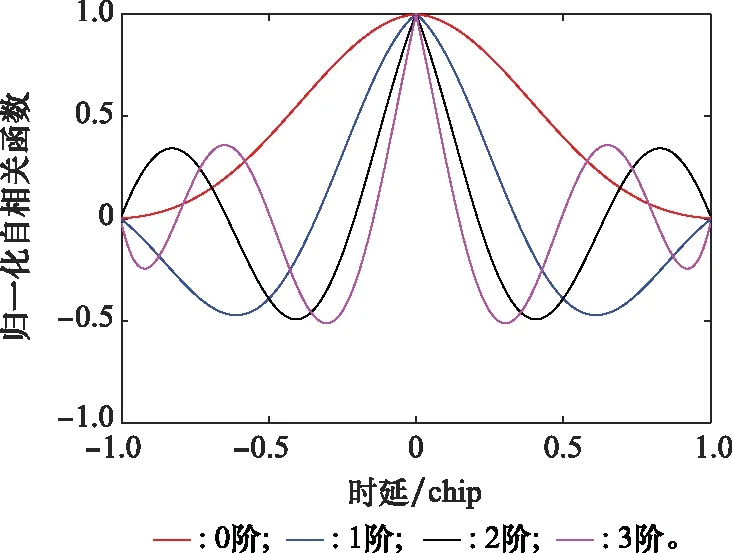
图3 PSWF自相关函数
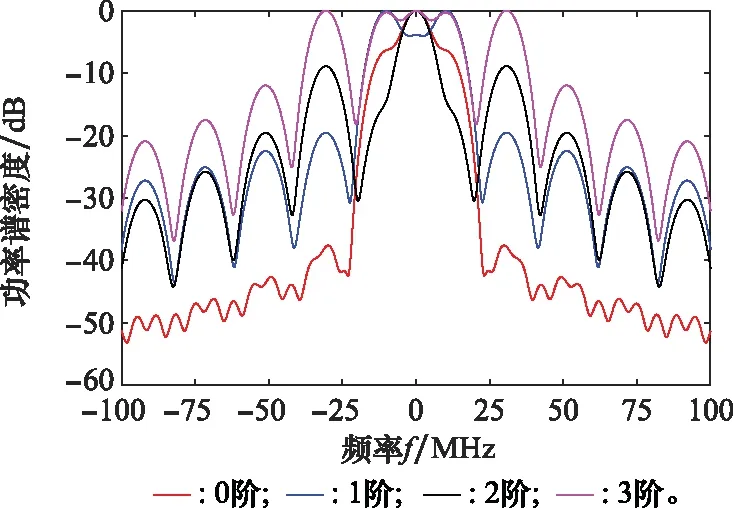
图4 PSWF功率谱密度
若将0阶PSWF信号记为gPSWF(t),对gPSWF(t)积分得到其相位成形脉冲函数qPSWF(t),并对qPSWF(t)信号波形进行归一化处理,使其满足单调递增且最大值为0.5:
(15)
gPSWF(t)与qPSWF(t)的关系如图5所示。

图5 归一化0阶gPSWF(t)信号及相位脉冲信号qPSWF(t)
一般来说,CPM信号的自相关函数和功率谱密度表达式都较复杂[28],除MSK信号的功率谱可得到显性表达式外,其他CPM信号如SFSK、GMSK和PSWF-CPM的功率谱往往需借助计算机进行数值解算。由于信息符号包含在CPM信号相位中,因此信号频谱特性与其相位路径也有着密切联系,基础特性越好的调频脉冲函数,相位路径越光滑,能进一步改善已调波的频谱效能。
假定初始相位为0,即φ(0,α)=0,当输入数据αi=[1,-1,-1,1,-1,1]时,全响应CPM信号的相位路径和功率谱密度分别如图6和图7所示。可以看出,MSK信号码元转换时刻容易产生“尖角”,导致频谱旁瓣滚降速度慢;SFSK信号的相位路径在MSK线性特征上叠加了正弦信号,使“尖角”得以平滑,但在每个码元的中点附近,SFSK相位路径的变化率较MSK有了显著增加,所以SFSK频谱主瓣宽度与MSK相比不但没有任何改善,反而变宽了;而CPM-PSWF信号在保留了相位路径在码元转换时刻变化率为0的同时,减小了在一个码元内各个时刻点上的斜率值。因此,CPM-PSWF信号在保持原有频谱主瓣宽度的基础上,不仅频谱滚降快而且带外辐射小。
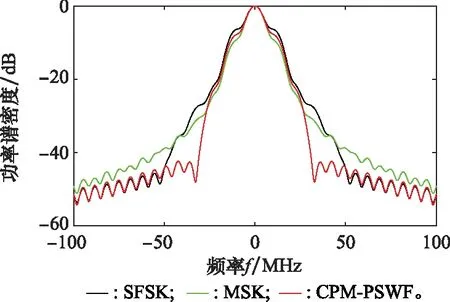
图7 全响应CPM信号功率谱密度
2.2 关键参数对CPM-PSWF功率谱特性的影响
除频率脉冲函数g(t)与CPM信号功率谱密切相关外,调制指数h、关联长度L、进制数M也都是影响CPM信号功率谱的关键参数。为找到最适用于北斗C波段导航的CPM-PSWF信号,有必要研究以上关键参数对CPM-PSWF信号功率谱的影响。
h控制着相对载频的频率偏移,h越小,功率谱旁瓣越低,占用频带越小,信号能量越集中。图8展示了h对CPM-PSWF功率谱特性的影响,其中CPM-PSWF子族选为“BM1PSWFC=2”信号。由图8(a)可知,当h<1时,CPM-PSWF信号功率谱密度相对平滑,且0.5

图8 调制指数h对CPM-PSWF功率谱特性的影响
考虑到目前C波段CPM候选导航信号均采用h=0.5的子族,同时兼顾CPM-PSWF信号接收机复杂度,本文主要研究h=0.5、M≤4且L≤2的CPM-PSWF信号子族。
通常情况下,GNSS生产商将信号主瓣宽度作为接收机参考带宽。以目前应用最广泛的二进制相移键控(binary phase shift keying, BPSK)信号为例,若码速率选为10.23 MHz,则BPSK信号主瓣带宽为20.46 MHz,这便能充分利用C波段仅有的20 MHz带宽。为使CPM-PSWF信号与BPSK信号具有类似的主瓣宽度,且大部分能量集中在主瓣内,采用文献[14]提出的单主瓣CPM信号参数设计方法,即
(1)h=0.5且M=2的CPM-PSWF信号
(16)
(2)h=0.5且M=4的CPM-PSWF信号
(17)
式中:M为进制数;fC为码速率;TC为码元宽度。
本文码速率fC设为10.23 MHz。由式(16)和式(17)可知,若码速率相同,则采用四进制信号的码元宽度是二进制的两倍。为方便表述,将g(t)为PSWF且TC=1/(10×1.023 MHz)、M=4、L=2、h=0.5的CPM信号简记为QM2PSWF(10),若是采用二进制则记为BM2PSWF(20),同理MSK(10)作为特殊的CPM子族,记为BM1REC(20)。
图9展示了L对CPM-PSWF功率谱特性的影响。可以看到无论采用二进制还是四进制,L越长,单位符号内所包含的信息就越多,有助于CPM-PSWF信号将更多功率集中在主瓣,同时有效降低旁瓣幅度。

图9 关联长度L对CPM-PSWF信号功率谱特性的影响
图10为M对CPM-PSWF功率谱特性的影响。M直接影响每个符号持续时间内所携带的信息量,M越大,单位符号持续时间内所携带的信息量越多,功率谱密度的带外辐射减小,有助于提高主瓣的功率集中度。

图10 进制数M对CPM-PSWF信号功率谱特性的影响
图11为C对CPM-PSWF功率谱特性的影响,由图(11)可知,改变C会影响调制信号带宽。当信号时宽固定时,可以通过调节C来灵活控制CPM-PSWF信号带宽,且C越小,调制信号功率谱旁瓣越低,带外衰减越快,这也是CPM-PSWF相较于经典CPM信号的独特优势。

图11 时间带宽积C对CPM-PSWF信号功率谱特性的影响
从C波段信号设计角度,可以考虑适当增加M和L,来获得功率谱特性更好的CPM-PSWF信号,同时通过灵活设置C,最大化利用C波段仅有的20 MHz带宽,但需要注意M和L的增大均会增加接收端的复杂度。
事实上,为筛选出功率谱特性较好、参数较优的CPM-PSWF导航信号,在仿真实验中需综合考虑M、L和C这3个关键参数共同作用的影响。为此,仿真了14组M、L、C不同参数CPM-PSWF信号的功率谱,并将结果对比分析,最终初步筛选出4个CPM-PSWF子族作为C波段候选导航信号,这4个信号分别是“BM2PSWF(20)C=1”“BM2PSWF(20)C=2”“QM2PSWF(10)C=4”以及“QM2PSWF(10)C=6”信号。考虑到篇幅,图12并未展示所有实验结果,仅展示出4个CPM-PSWF候选信号的功率谱特性,并与QM2RC(10)、BPSK(10)及Galileo系统C波段候选信号MSK(10)和GMSK(10)一同对比分析。

图12 C波段候选导航信号功率谱特性
由图12可知,MSK(10)信号的主瓣宽度约为BPSK(10)的1.5倍,而其他候选信号主瓣带宽与BPSK(10)一致,且所选的4个CPM-PSWF信号旁瓣衰减速度均优于MSK(10)和BPSK(10),其中BM2PSWF(20)C=1在所有候选信号中表现最佳。
3 CPM-PSWF候选信号导航性能评估
要想得到最优参数CPM-PSWF导航信号,必然还要兼顾所选信号的导航性能。卫星导航信号性能评估是分析卫星导航信号性能的必要手段,目前用来评估GNSS信号的基础性能指标主要集中在兼容性、码跟踪精度和抗多径性能等方面[32]。
3.1 兼容性
根据第1节的论述,C波段导航信号落入RAS和MLS频段的PFD值应满足相应阈值。C波段卫星下行导航信号在RAS频段内的PFD值表示为
(18)
式中:d为接收机与可见星间的距离;Latm为大气衰减;C波段信号功率谱密度为G(f);EIRP为卫星的等效全向辐射功率;f的单位为MHz。
在MLS频带内的PFD计算方法与RAS的类似,只需将积分区间改为MLS频带内的任意150 kHz频段,即
(19)
另外,C波段信号的带外发射功率(out-of-band emission, OOBE)也是衡量兼容性的重要指标[6],定义为
(20)
其中,积分区间为RAS、MLS和C波段上行信号频段。
若EIRP为48.8 dBW[5],d为21 528 km,Latm为0.5 dB,则可得到表1所示的C波段候选信号在不同服务带宽下的OOBE与PFD值,其中粗体表示载波位于5 022.93 MHz。

表1 C波段候选信号在不同服务带宽下的OOBE与PFD值
表1给出了载波频率分别为5 019.861 MHz和5 022.93 MHz时,C波段候选信号在不同服务带宽下的OOBE和PFD值。由表1可知,无论载波频率处于何处,所有C波段候选导航信号在MLS服务频段内均能满足PFD值低于阈值-124.5 dBW/m2的要求,而若不经过滤波器的带外抑制,所有候选信号均不能满足RAS的兼容性约束。
但相较于5 019.861 MHz,载波频率处于5 022.93 MHz时,C波段候选导航信号在上行信号区间的平均OOBE降低了5.632 9 dBc,在RAS频段内的PFD平均值也低了2.358 9 dBW/m2。说明将载波频率选为5 022.93 MHz,不仅能在一定程度上缓解对RAS的干扰,同时能大幅降低对C波段上行服务信号的干扰。因此,本文C波段导航信号的载波频率选为5 022.93 MHz。
另外,候选的4个CPM-PSWF信号在RAS区间的PFD值均与GMSK(10)相当,甚至略低于GMSK(10),但却优于BPSK(10)信号至少20 dB,其中BM2PSWF(20)C=1信号在兼容性方面表现最佳,无论是在RAS、MLS还是在C波段上行信号区间的OOBE和PFD值均为最低。
3.2 码跟踪精度
扩频伪随机码的测距精度,通常称为码跟踪精度,取决于码元宽度,它直接表征了导航系统的测距性能。伪码精确跟踪是伪距测量的前提,因此,在导航信号体制设计过程中就必须考虑码跟踪误差带来的影响。码跟踪性能理论上能达到的最佳跟踪精度由克拉美罗下界(Cramer-Rao lower bound, CRLB)下界给出,而CRLB与Gabor带宽紧密相关。
3.2.1 码跟踪误差
GNSS接收机码环的主要功能是跟踪伪码相位,保持复制伪码与接收伪码之间相位一致,从而获得接收信号的码相位及其伪距测量值。在高斯白噪声环境中,以相干超前-滞后处理(coherent early-late processing, CELP)法作为鉴相器的码环,对调制信号的码跟踪误差标准差σCELP[33]可表示为
(21)
式中:Gs(f)为调制信号s(t)在无穷带宽上的归一化单位面积的功率谱密度;Br为接收机射频前端带宽;BL为码环噪声单边带宽;Ti为相干积分时间;Δ为前后相关器间隔;Cs/N0为载噪比。
3.2.2 Gabor带宽
(22)
Gabor带宽ΔfGabor定义为
(23)
由式(23)可知,Gabor带宽是信号功率谱密度在接收机前端带宽范围内的加权积分,当BL和Cs/N0相同时,信号Gabor带宽决定了码跟踪误差下界,可作为衡量GNSS信号码跟踪精度的重要指标。显然,信号高频分量占比越大,Gabor带宽越大,码跟踪误差下界越小,码跟踪精度越高。
图13展示了C波段候选信号的码跟踪性能,其中Br为20 MHz,Ti为1 ms,Δ为0.1 chip,BL为1 Hz,Cs/N0在20~50 dB·Hz变化。

图13 C波段候选导航信号的码跟踪性能
由图13(a)可知,相干环路码跟踪误差随着载噪比增加逐渐减小,并最终趋于0。码跟踪误差最小的信号为MSK(10),QM2PSWF(10)C=6次之,BM2PSWF(20)C=1与C=2这两组信号的码跟踪误差与GMSK(10)表现相当,BPSK(10)码跟踪误差最大。
由图13(b)可知,在40 MHz范围内,当Br增大时,除BPSK(10)信号的Gabor带宽出现阶梯式增长,其他候选信号Gabor带宽均随Br的增加逐渐增大,并在最大值处趋于平缓。由于C波段可用带宽仅有20 MHz,表2(见下页)给出了接收机带宽为20 MHz时,各候选信号的Gabor带宽。可以看出,MSK(10)信号的Gabor带宽能达到4.336 MHz,在所有候选信号中居于首位;QM2PSWF(10)C=6信号的Gabor带宽仅比MSK(10)低了0.039 MHz,位居第二。在所选的4个CPM-PSWF候选信号中,除BM2PSWF(20)C=1信号的Gabor带宽略小于GMSK(10)信号,其他3个CPM-PSWF信号的Gabor带宽均大于GMSK(10)信号,表明CPM-PSWF信号具有良好的码跟踪性能。

表2 接收机带宽为20 MHz候选导航信号的Gabor带宽
3.3 抗多径性能
多径误差是卫星导航的主要误差源之一,在时间和空间上均不呈相关性,容易导致信号相关函数发生畸变,破坏相关函数的对称性,从而引入跟踪偏差。因此,研究不同信号调制结构下的抗多径性能成为导航信号设计中的重要一环,但分析和衡量卫星信号的抗多径性能是一项相当复杂的工作,它不但至少需要考虑影响抗多径性能的接收机构架和算法、信号调制结构和多径信号3个方面的具体状况,而且性能评价参量也很难有统一标准[34]。目前,评估导航信号的抗多径性能通常采用多径误差包络和平均多径误差这两个指标。
3.3.1 多径误差包络
多径误差包络是在不同多径延迟下多径效应所引起的最大偏差,反映了特定多径延迟对应的最大多径误差。当只有一条多径信号存在时,相干码跟踪环路的多径误差包络[35]为
(24)

3.3.2 平均多径误差
平均多径误差是多径误差包络随多径延迟变化的累积平均值,反映了时延范围内多径误差的整体水平。平均多径误差与多径误差包络之间存在如下关系:
(25)

图14对比了C波段候选导航信号在单条多径信号条件下的抗多径性能,其中多径-直达信号幅度比设为-6 dB,Br为20 MHz,Δ为0.1码片。
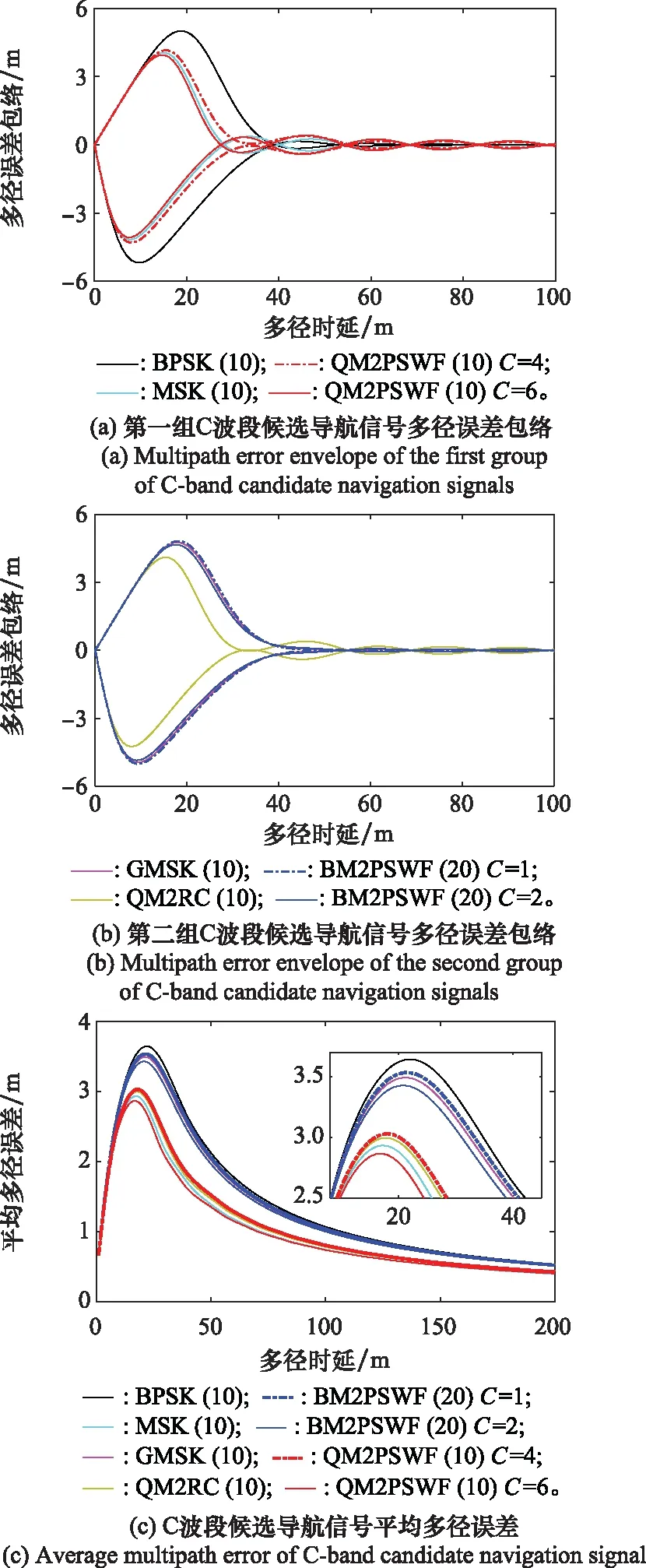
图14 C波段候选导航信号抗多径干扰性能
从图14(a)和图14(b)可以看出,几乎所有候选信号的多径误差包络都在多径时延为20 m左右时达到最值,之后随着多径时延的增大该误差包络迅速回落,并逐渐收敛于一个较小值。其中,QM2PSWF(10)C=6信号多径误差包络幅度最小,收敛速度最快。图14(c)给出了平均多径误差随多径时延的变化情况,为量化候选导航信号的抗多径性能,表3给出了候选信号平均多径误差的峰值排序。显然,QM2PSWF(10)C=6信号抗多径性能最优,其平均多径误差峰值分别低于GMSK(10)和BPSK(10)信号的0.627 m和0.778 m。
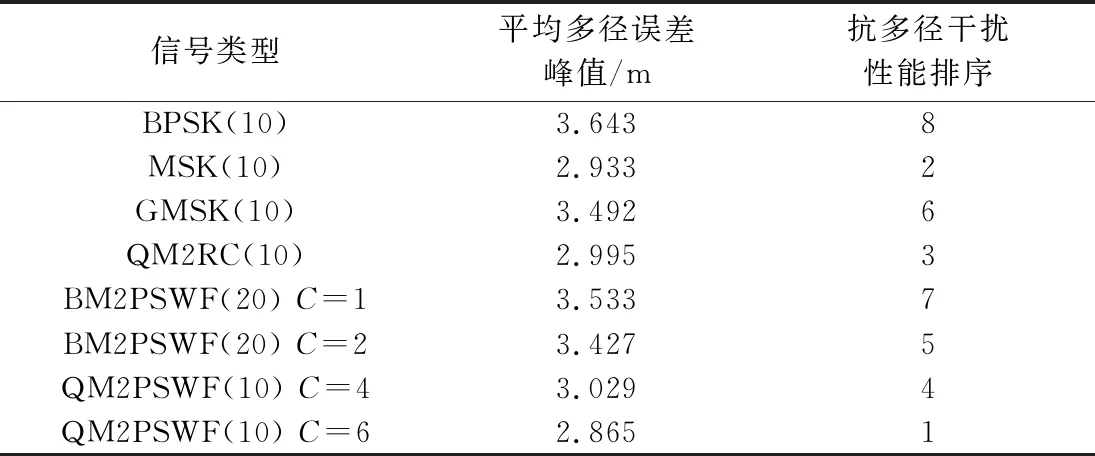
表3 C波段候选导航信号平均多径误差峰值
综上所述,很容易得出Galileo放弃MSK信号的原因。从仿真结果来看,即使MSK(10)信号在码跟踪精度和抗多径性能中均具有很强的竞争力,但其在兼容性评估中的表现却差强人意。而BM2PSWF(20)C=1信号虽然具有很高的频谱效能,兼容性表现最佳,但其码跟踪性能和抗多径性能又逊色于其他候选信号。显然,想设计出一种在所有性能评估中均处于绝对优势的导航信号是不切实际的。但有效的卫星导航信号设计不仅能够提高GNSS导航性能,也是缓解现阶段频谱资源紧张、减小与相邻频段其他业务信号干扰的有效途径。
4 结 论
随着L波段频谱拥挤问题的日益加剧,未来在S波段和C波段播发卫星导航信号将是信号体制设计发展的最终趋势[36]。本文探索性地将CPM-PSWF调制信号应用于C波段导航,通过对关键参数的择优选择,获得频谱效能较好的4个CPM-PSWF子族作为C波段候选导航信号。研究表明,与目前C波段候选导航信号相比,4个CPM-PSWF候选信号的导航性能相当甚至更优,说明将CPM-PSWF调制信号应用于卫星导航具备一定优越性,其中QM2PSWF(10)C=6且h=0.5的CPM-PSWF信号能够在一定程度上缓解与邻频RAS、MLS和C波段上行信号的干扰,它与GMSK(10)信号兼容性相当,但Gabor带宽更大,平均多径误差更小,更适合作为北斗卫星导航系统C波段导航信号。
猜你喜欢
航天返回与遥感(2022年2期)2022-05-12
现代畜牧科技(2021年4期)2021-07-21
空间科学学报(2021年6期)2021-03-09
流行色(2020年9期)2020-07-16
家庭影院技术(2018年9期)2018-11-02
电子制作(2018年2期)2018-04-18
制导与引信(2017年3期)2017-11-02
CHIP新电脑(2017年6期)2017-06-19
电子制作(2017年8期)2017-06-05
移动通信(2017年3期)2017-03-13
