
网络化多传感器-多武器协同防空任务规划
2022-11-19 08:11帅逸仙周金鹏程仙垒
系统工程与电子技术 2022年12期
董 晨, 帅逸仙, 周金鹏, 赖 鹏, 程仙垒
(1. 上海机电工程研究所, 上海 201109; 2. 军事科学院系统工程研究院, 北京 100101)
0 引 言
空中威胁和军事技术的发展促使防空体系向网络化方向演化[1],以协同作战能力(cooperative engagement capability, CEC)为核心的海军一体化火力控制-制空(naval integrated fire control-counter air, NIFC-CA)[2]、陆军一体化防空反导(integrated air and missile defense, IAMD)[3]是上述体系的代表,这些体系以网络为中心,各要素互联互通、分散部署,提升整体作战能力。近年来出现的马赛克战[4]概念更加强调以分布式作战管理取代集中式指挥控制,利用动态、协调和具有高度自适应性的可组合力量,提升生存能力[5]。
通过对典型网络化防空体系的研究发现,对体系各组成要素的任务进行合理规划与控制,能够显著提升体系的防空效能。传感器、武器等要素的协同是其中的重要部分,基于通用的算法和共享的战术数据,在多个分散的平台上同时产生相同的决策,形成不同平台传感器、武器的协同计划,可实现多传感器对目标的接力跟踪、跨平台的传感器到武器打击引导、多武器对目标的协同抗击,因此网络化多传感器-多武器协同防空任务规划应作为重点问题开展研究。
目前,针对多传感器资源管理、协同跟踪等问题,以探测精度最高、协同探测效能最大等为目标,形成多传感器的协同探测计划,保证探测任务有序执行[6-13]。针对多武器火力规划、动态武器-目标分配等问题,以最小化发射时间、最大化拦截效益等为目标,形成武器-目标分配方案[14-21]。针对网络化作战条件下防空火力分配,对目标-制导节点-火力节点间的优化匹配问题开展研究[22],提出协同制导体制下的武器运用决策方法[23]及武器通道组织模型[22]。此外,文献对网络化条件下的“目标-传感器-武器”匹配问题进行研究,实现某一时刻或阶段上的探测、火力资源最优分配[21-24]。但是,对多传感器-多武器协同任务规划有待进一步研究,这一问题在“目标-传感器-武器”匹配的基础上,要求在交战全过程中对传感器跟踪时段、武器拦截时段进行合理规划,避免作战资源在时间上的冲突,使对目标的跟踪时间满足武器制导需求,且防空效能最优化,最终形成以“目标-传感器及跟踪时段-武器及拦截时段”表示的多传感器-多武器协同交战计划,这增加了问题的复杂程度。
针对上述问题,本文提出网络化多传感器-多武器协同防空任务规划方法。考虑任务要求、装备性能、运用限制等约束,构建多武器拦截与多传感器跟踪任务规划模型,前者以拦截时刻最早或次数最多为目标,输出武器-目标配对、拦截时段及跟踪时间要求,后者以满足跟踪时间要求为目标,输出传感器-目标配对及跟踪时段。设计基于时段优选拼接和分支定界法的多传感器-多武器协同任务规划算法,通过武器拦截时段优选加多步传感器跟踪时段优选与拼接,形成多传感器-多武器协同交战计划,支持多传感器接力跟踪、跨平台打击引导、多武器协同抗击。假定预警机支援下的舰艇编队协同防空场景,设置多种威胁目标及拦截任务,验证本文提出方法的有效性。
1 问题描述
以NIFC-CA为例,对于由舰艇、预警机、战斗机等组成的任务群,各平台通过CEC网络实时共享数据,基于通用的算法开展多传感器-多武器协同防空任务规划,为来袭目标规划最优的防空武器及拦截时段,实现多武器对目标的协同抗击,满足期望的拦截效果,同时为目标规划最优的传感器(或传感器序列)及跟踪时段,使对目标的跟踪时间满足武器拦截目标的制导需求,实现多传感器对目标的接力跟踪以及跨平台的传感器到武器打击引导。
为不失一般性,在后续研究中假设任务群由多个作战平台组成,通过指挥控制系统对m部具备跟踪制导功能的传感器和n部舰空导弹武器系统组网管理,且已获得p个最具威胁的来袭目标信息,估计目标的航迹。
2 协同任务规划方法
2.1 规划信息
作为网络化多传感器-多武器协同任务规划的输入,定义以下的规划信息。



2.2 任务规划模型
将网络化多传感器-多武器协同防空任务规划分解为相关联的多武器拦截和多传感器跟踪两部分,分别构建任务规划模型。多武器拦截任务规划模型用于在多约束条件下寻找最佳的武器-目标配对,规划对目标的拦截时段并提出跟踪时间要求。多传感器跟踪任务规划模型用于在多约束条件下寻找最佳的传感器-目标配对,规划对目标的跟踪时段,尽可能满足对目标的跟踪时间要求。通过上述配对,可将不同平台的武器和传感器通过目标关联起来,实现跨平台打击引导等网络化作战模式。
2.2.1 多武器拦截任务规划模型
多武器拦截任务规划是在多约束条件下,根据对不同类型目标的拦截要求,优化多平台的武器拦截时段,形成多部武器对多批目标的协同拦截计划,并根据武器对目标的拦截时段提出跟踪时间要求。该问题对应的优化模型如下:
(1)
s.t.
-DF*TF0≤0
(2)
DF·I-NFR≤0
(3)
I·DF-I=0
(4)
NTE-I·(DF*NF)≤0
(5)
式中:0与I分别为合适维的零向量和单位向量;*为两个同维矩阵或向量的相同行列元素相乘。

(6)
(7)

式(2)与式(3)为武器能力约束,分别代表武器对目标具备拦截条件以及拦截能力。式(4)为武器运用约束,代表对任一目标都应分配一部武器进行射击,避免目标漏防,同时也避免多部武器同时射击一个目标导致弹药浪费。式(5)为任务要求约束,代表对各目标的射击次数不应少于期望射击次数。
设式(1)~式(5)优化问题的解为DFO,则规划的对目标的起始交战时刻向量TE0和终止交战时刻向量TEf,TE0、TEf∈Rp均为行向量,有
TE0=I·(DFO*TF0)
(8)
TEf=I·(DFO*TFf)
(9)
TE0和TEf的第i个元素tE0(i)和tEf(i)分别代表规划的对第i个目标的起始交战时刻和终止交战时刻。
为满足武器拦截目标的跟踪时间要求,需要在武器与目标交战之前使传感器跟踪目标并为武器提供引导,起始引导时刻与起始交战时刻之间需留出武器的准备时间,在武器与目标交战之后结束跟踪目标并终止引导。定义起始引导时刻向量TG0和终止引导时刻向量TGf,TG0、TGf∈Rp为行向量,其第i个元素tG0(i)、tGf(i)分别代表对第i个目标的起始引导时刻和终止引导时刻,有
TG 0=TE0-TFP·DFO
(10)
TGf=TEf
(11)
2.2.2 多传感器跟踪任务规划模型
多传感器跟踪任务规划是在多约束条件下,优选多平台的传感器跟踪时段,形成多部传感器对多批目标的协同跟踪计划,使传感器对目标的跟踪时段满足武器拦截任务规划提出的跟踪时间要求。该问题对应的优化模型如下:
(12)
s.t.
-DS*TS 0≤0
(13)
DS·I-I≤0
(14)
I·DS-I=0
(15)
I·(DS*TS 0)-TG 0≤0
(16)
TG 0-I·(DS*TSf)<0
(17)
TSAf*(DS·I)-(DS*TS 0)·I<0
(18)
式(12)中,矩阵DS∈Nm×p为优化变量,其元素非0即1,记其第i行第j列元素为dS(i,j),仅当dS(i,j)=1时代表分配第i个传感器跟踪第j个目标。JS为优化目标,有
(19)
式(19)代表对目标的跟踪时间最大程度满足跟踪时间要求。其中, | 定义为两个同维矩阵或向量的相同行列元素相除。

设式(12)~式(18)优化问题的解为DS O,则规划的对目标的起始跟踪时刻矩阵TT0和终止跟踪时刻矩阵TTf,TT0、TTf∈Rp均为行向量,为节约传感器资源且满足任务要求约束,有
TT 0=max{I·(DS O*TS 0),TG 0}
(20)
TTf=min{I·(DS O*TSf),TGf}
(21)

2.3 规划算法设计
武器拦截任务规划和传感器跟踪任务规划是NP(non-deterministic polynomial)-complete问题[25],这类问题可由粒子群算法、退火算法、遗传算法等智能优化算法求解[26-31],但这类算法的随机性、近似性不能保证在多个分散的作战平台上产生相同的决策,因此需采用精确算法求解网络化多传感器-多武器协同防空任务规划问题。而且本文研究的网络化多传感器-多武器协同防空任务规划主要解决战术/火力层面的作战资源协调问题,问题的规模有限,采用精确算法能在可接受的时间内求得最优解。
本文设计基于时段优选拼接和分支定界法的多传感器-多武器协同任务规划算法,基于多武器拦截任务规划模型和多传感器跟踪任务规划模型,通过武器拦截时段优选加多步传感器跟踪时段优选与拼接,实现网络化多传感器-多武器协同防空任务规划。算法流程图如图1所示。
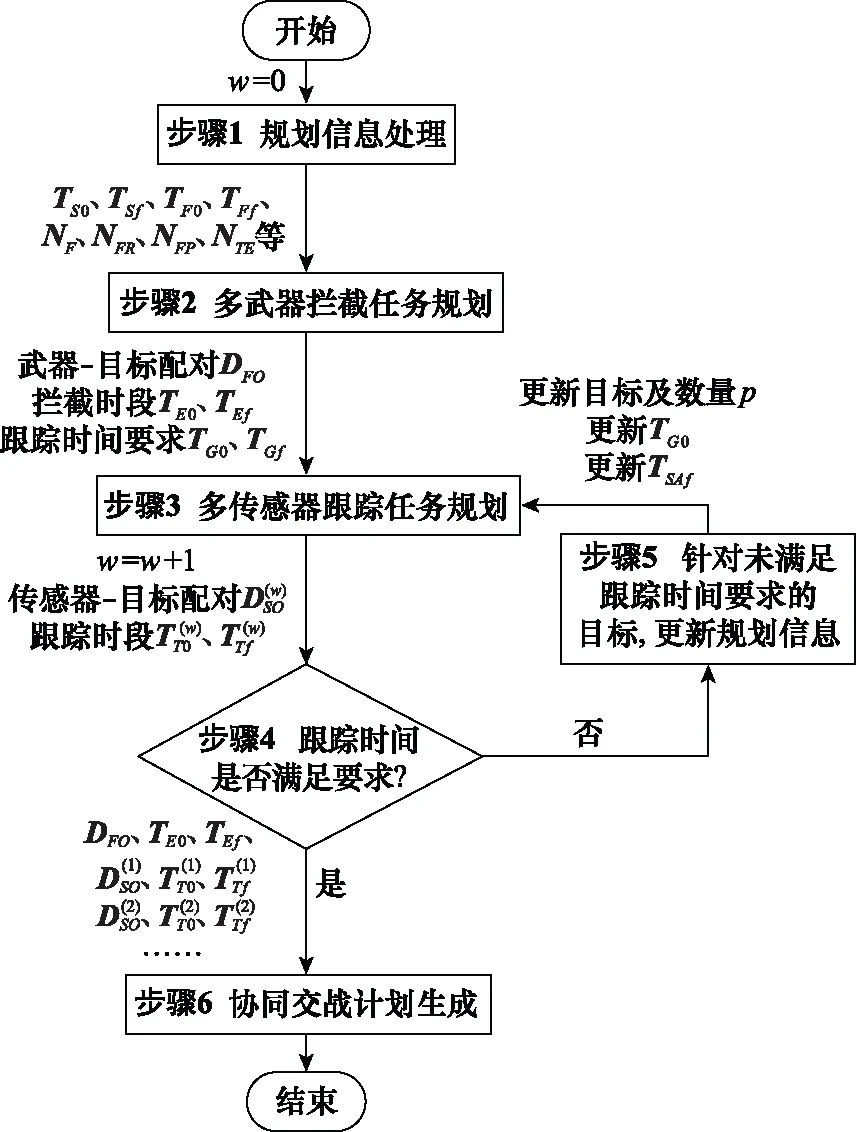
图1 算法流程图
算法将网络化多传感器-多武器协同防空任务规划分解为步骤2的多武器拦截任务规划和步骤3~步骤5的多步多传感器跟踪任务规划两个主要部分,对问题进行解耦。在第一部分,优选武器拦截时段,形成对目标的拦截计划,并计算对目标的跟踪时间要求;在第二部分,根据跟踪时间要求,优选传感器跟踪时段,尽可能满足对目标的跟踪时间要求,若一次规划未满足要求,则更新多传感器跟踪任务规划模型,再次优选传感器跟踪时段,直至跟踪时间要求满足为止,对前述多次规划得到的传感器跟踪时段进行拼接,形成对目标的跟踪计划。最后,依靠步骤6的协同交战计划生成,形成多传感器-多武器协同交战计划。该算法的具体步骤如下。
步骤 1规划信息处理。根据目标信息、装备信息、任务要求等生成规划信息,包括TS 0、TSf、TF0、TFf、NF、NFR、TFP、NTE等。
步骤 2多武器拦截任务规划。建立式(1)~式(5)所示的多武器拦截任务规划模型,采用分支定界法计算最优解DFO,按式(8)和式(9)计算TE0、TEf,并按式(10)和式(11)计算TG 0、TGf。
步骤 3多传感器跟踪任务规划。建立式(12)~式(18)所示的多传感器跟踪任务规划模型,采用分支定界法计算最优解DS O,按式(20)和式(21)计算TT 0、TTf。
步骤 4跟踪时间要求满足判断。将DS O代入式(19)中的DS,计算JS;若JS<1,说明步骤3得到的多传感器跟踪计划不满足跟踪时间要求,转步骤5;若JS≥1,则跟踪时间要求已满足,转步骤6。
步骤 5规划信息更新。按下式计算对各目标的跟踪制导时间满足程度,定义向量Q∈Rp。
Q=[I·(DS O*TSf)-TG 0]|(TGf-TG 0)
(22)
Q的第i个元素q(i)代表对第i个目标的跟踪制导时间满足度,若q(i)<1,则对第i个目标的跟踪时间不满足跟踪时间要求;针对全部未满足跟踪时间要求的目标:
步骤5.1目标数更新,按照未满足跟踪时间要求的目标的数量更新p值;
步骤5.2起始引导时刻更新,假设对第i个目标,其起始引导时刻tG0(i)更新为
tG0(i)=tTf(i)-δ
(23)
式中:tTf(i)为步骤3规划的对第i个目标的终止跟踪时刻,δ为两部传感器接力跟踪目标的交班过渡时间;
步骤5.3传感器工作状态更新,对步骤3已分配跟踪任务的传感器,依据该传感器对目标的终止跟踪时刻更新TSAf中的相应元素;


3 规划示例
假设3艘驱逐舰在1架预警机支援下执行对空防御任务,在此场景下验证本文提出的方法,检验规划结果是否满足前述约束并实现了优化目标。
3.1 任务场景1(拦截轰炸机群)
3.1.1 条件假设
假设有6批轰炸机以300 m/s的速度从方位角90°的扇面内对3艘驱逐舰实施突击。设驱逐舰可同时跟踪并拦截10批目标,预警机可同时跟踪20批目标,假设各驱逐舰为不暴露自身位置,舰载雷达不开机,依靠预警机探测信息引导各驱逐舰舰空导弹拦截轰炸机。将目标编号为T1~T6,作战平台、传感器及武器编号如表1所示。

表1 场景1作战平台、传感器、武器的编号
3.1.2 算法参数
依据假设条件,算法的参数及其取值如下:目标数量p=6,武器数量n=3,传感器数量(含虚拟传感器)m=20,武器对目标的起始交战时刻矩阵TF0中各元素和终止交战时刻矩阵TFf中各元素取值如表2所示,拦截机会矩阵NF中各元素取值如表3所示,武器拦截能力向量NFR中各元素均为10,武器交战准备时间向量TFP中各元素均为30 s,期望射击效果向量NTE中各元素均为4,传感器对目标的起始跟踪时刻矩阵TS 0中各元素均为1 s,终止跟踪时刻矩阵TSf中各元素均为300 s,两部传感器接力跟踪目标的交班过渡时间为5 s。

表2 武器对目标的拦截时段(场景1)

表3 武器对目标的拦截机会(场景1)
3.1.3 规划结果
以平均拦截时刻最早为目标规划多传感器-多武器协同交战计划,结果如图2所示。在Intel i3处理器、4G内存PC机上,利用Matlab 7.6.0软件完成规划耗时1.02 s。图2(a)中,横坐标为时间轴,纵坐标为目标轴,有T1~T6共6个目标。红色实线为规划的武器对目标的拦截时段,执行拦截任务的武器编号W1~W3标注在相应的红线中部。蓝色实线为规划的传感器对目标的跟踪时段,执行跟踪任务的传感器编号S1~S20标注在相应的蓝线中部。由图2(a)可见,对各目标均分配了武器进行拦截,对目标T1~T6的拦截机会分别为6、6、4、4、5、5,满足对各目标拦截次数不少于4次的要求,平均拦截机会为5次,对目标的平均交战起始时刻为75 s。对各目标均分配传感器进行跟踪,对各目标的持续跟踪时间满足武器作战要求,即对一个目标,规划的跟踪时段比拦截时段提前30 s开始、规划的跟踪时段与拦截时段同时结束。图2(b)中,驱逐舰以黑色方框表示,预警机以黑色圆圈表示,红虚线代表对目标飞行航线的拦截部分,蓝实线代表对目标飞行航线的跟踪部分。
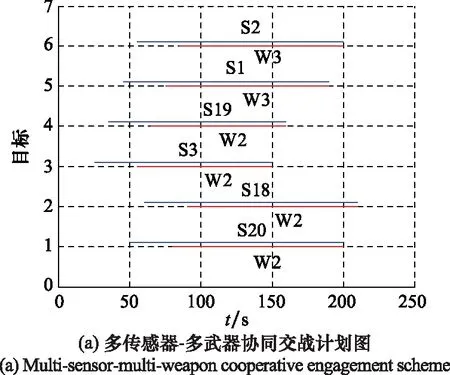
图2 场景1下的规划结果(拦截时机优化)
结合表1和图2,可形成如表4所示的多传感器-多武器协同交战计划。
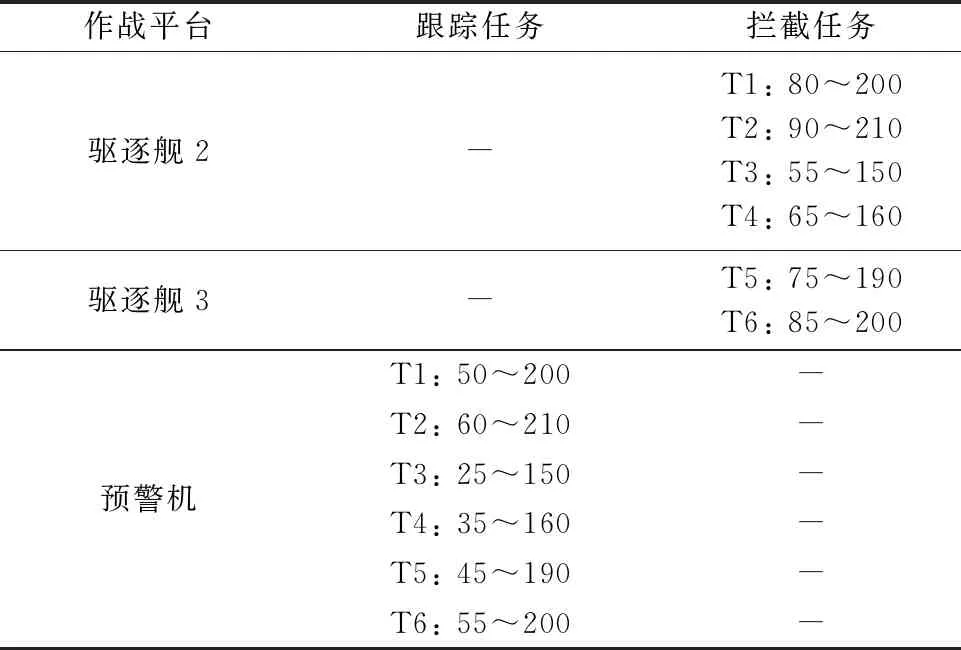
表4 场景1下的协同作战计划
作为对比,以平均拦截机会最大为目标规划多传感器-多武器协同交战计划,结果如图3所示。各项约束条件均满足,对目标T1~T6的拦截机会分别为6、6、7、7、6、6,平均拦截机会增加到6.3次,对目标的平均交战起始时刻则延后到95 s。
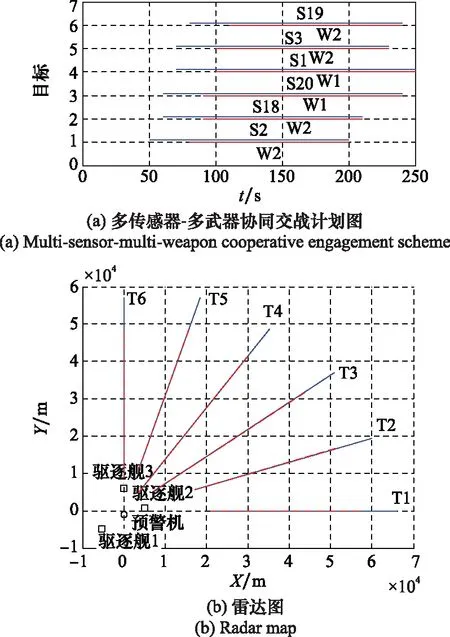
图3 场景1下的规划结果(拦截机会优化)
对比上述两种优化目标下的规划结果可见,算法分别实现了对拦截时机和拦截机会的优化,且武器和传感器装备能力、装备运用、任务要求等约束均得到满足。
3.2 任务场景2(抗击反舰导弹群)
3.2.1 条件假设
假设有24批反舰导弹以250 m/s的速度从方位角270°的扇面内对3艘驱逐舰实施攻击。设驱逐舰可同时跟踪并拦截10批目标,预警机可同时跟踪20批目标。将目标编号为T1~T24,作战平台、传感器及武器编号如表5所示。
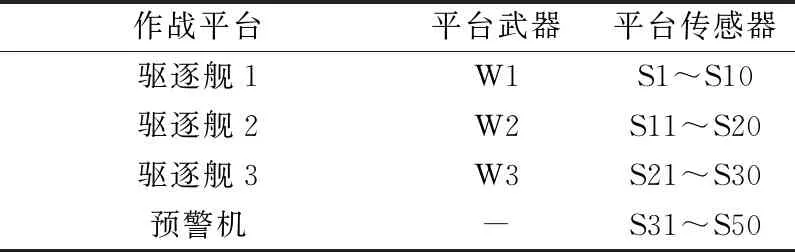
表5 场景2作战平台、传感器、武器的编号
3.2.2 算法参数
依据假设条件,算法的参数及其取值如下:目标数量p=24,武器数量n=3,传感器数量(含虚拟传感器)m=50,武器对目标的起始交战时刻矩阵TF0中各元素和终止交战时刻矩阵TFf中各元素取值如表6所示,拦截机会矩阵NF中各元素取值如表7所示,武器拦截能力向量NFR中各元素均为10,武器交战准备时间向量TFP中各元素均为30 s,期望射击效果向量NTE中各元素均为5,传感器对目标的起始跟踪时刻矩阵TS 0中各元素和终止跟踪时刻矩阵TSf中各元素取值如表8所示,两部传感器接力跟踪目标的交班过渡时间为5 s。
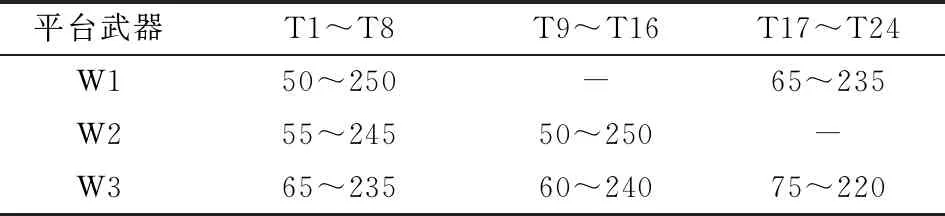
表6 武器对目标的拦截时段(场景2)

表7 武器对目标的拦截机会(场景2)

表8 传感器对目标的跟踪时段
3.2.3 规划结果
以平均拦截机会最大为目标规划多传感器-多武器协同交战计划,结果如图4所示。在与任务场景1相同的计算条件下,完成规划耗时3.04 s。
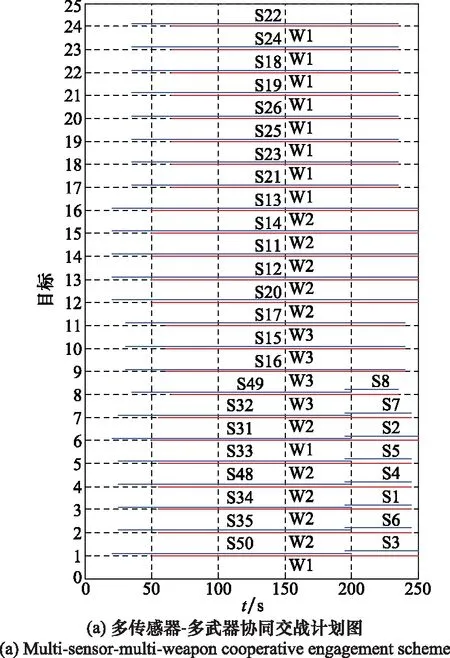
图4 场景2下的规划结果(拦截机会优化)
图4(a)中,横坐标为时间轴,纵坐标为目标轴,有T1~T24共24个目标。红色实线为规划的武器对目标的拦截时段,执行拦截任务的武器编号W1~W3标注在相应的红线中部。蓝色实线为规划的传感器对目标的跟踪时段,执行跟踪任务的传感器编号S1~S50标注在相应的蓝线中部。由图4(a)可见,对各目标均分配了武器进行拦截,对各目标的拦截机会分别为T6和T8各10次、T13~T16各9次、T1~T5和T7各8次、T9~T12各7次、T17~T24各6次,满足对各目标拦截次数不少于5次的要求,平均拦截机会达到7.5次。对各目标均分配传感器进行跟踪,其中对目标T1~T8的跟踪是由属于不同平台的传感器接力完成的,交班过渡时间满足5 s的要求,对各目标的持续跟踪时间满足武器作战要求,即对一个目标,规划的跟踪时段比拦截时段提前30 s开始、规划的跟踪时段与拦截时段同时结束。图4(b)中,驱逐舰以黑色方框表示,预警机以黑色圆圈表示,位置同图3(b);红虚线代表对目标飞行航线的拦截部分,蓝实线代表对目标飞行航线的跟踪部分。
结合表6和图4,可形成如表9所示的多传感器-多武器协同交战计划。
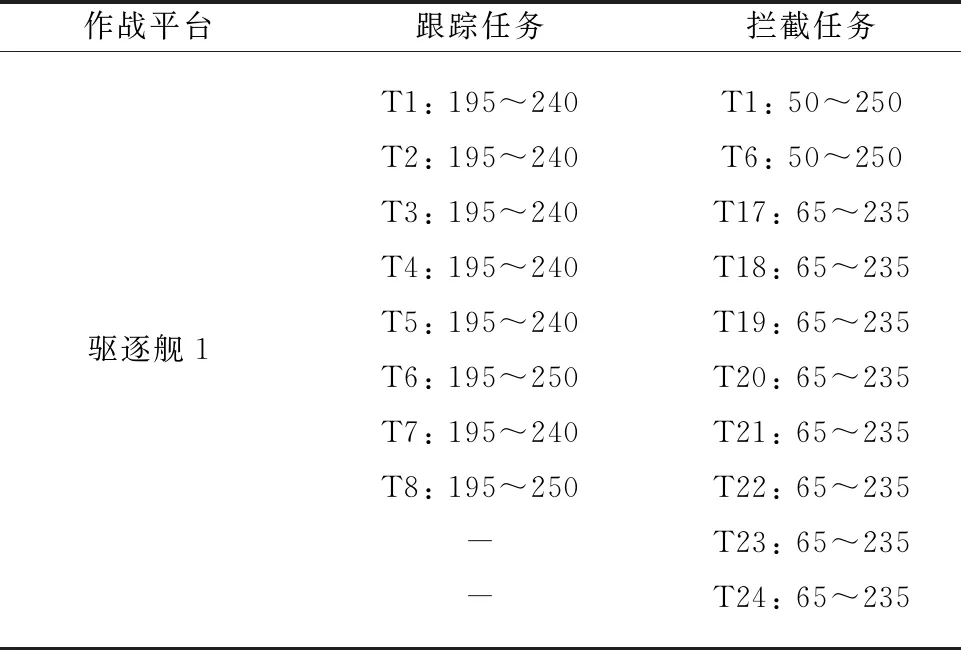
表9 场景2下的协同作战计划

续表9
作为对比,将驱逐舰2的探测能力减弱,压缩其对目标的探测远界,从而延后其对目标的起始跟踪时刻,更新后的传感器对目标的起始跟踪时刻矩阵TS 0中各元素和终止跟踪时刻矩阵TSf中各元素取值如表10所示,其他参数保持不变,以平均拦截机会最大为目标规划多传感器-多武器协同交战计划,结果如图5所示。各项约束条件仍满足,由于驱逐舰2对目标的起始跟踪时刻延后,对T9~T16的跟踪计划发生较大变化,由原驱逐舰2独立跟踪,变为由预警机负责200 s之前的跟踪任务,之后由驱逐舰2负责对T9、T10、T13~T16接力跟踪,由驱逐舰3负责对T11、T12接力跟踪,交班过渡时间仍满足5 s的要求。最终对目标的跟踪和拦截效果与图4(b)相同,这里不再重复绘制雷达图。
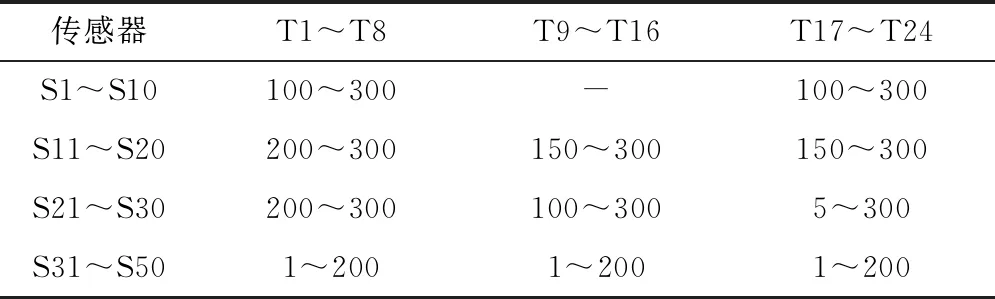
表10 场景2下传感器对目标的跟踪时段

图5 场景2下的规划结果(拦截机会优化,驱逐舰2探测能力削弱)
由上述两种情况下的规划结果可见,算法实现了对拦截时机的优化,武器和传感器装备能力、装备运用、任务要求等约束得到满足,特别是在部分传感器能力下降的情况下,调度其他传感器资源进行补充,保证了对目标的跟踪时间满足要求。
4 结 论
本文对网络化多传感器-多武器协同任务规划方法进行研究,建立多武器拦截与多传感器跟踪任务规划模型,设计基于时段优选拼接和分支定界法的多传感器-多武器协同任务规划算法,能以对目标的拦截机会最多或拦截时机最早、跟踪时段满足跟踪时间要求为目标,在满足武器和传感器装备能力、装备运用、任务要求等约束的条件下,生成“目标-传感器及跟踪时段-武器及拦截时段”表示的多传感器-多武器协同交战计划。在假设的舰艇编队与预警机协同防空场景下,设置拦截轰炸机群、反舰导弹群两类任务,分别验证本文提出的方法,规划结果均满足各项约束条件并实现了优化目标,该方法是有效的。
本文的规划算法在较小规模的多传感器-多武器协同防空任务规划上具有良好的应用潜力,也适用于装备论证仿真等对实时性要求不高的大规模应用场景。若在一个集中式指挥节点上进行运算,则可用粒子群算法、遗传算法等智能优化算法代替分支定界法,提高规划算法的时效性,更好地适应大规模规划问题。在后续研究中,需提升精确算法的时效性,以满足分布式指挥对求解精确性的要求和大规模规划问题对求解时效性的要求。
猜你喜欢
环球人物(2022年4期)2022-02-22
小资CHIC!ELEGANCE(2021年32期)2021-09-18
中国生殖健康(2019年8期)2019-01-07
综艺报(2018年17期)2018-09-14
小哥白尼·军事科学画报(2017年3期)2017-06-12
少儿科学周刊·儿童版(2016年2期)2016-03-19
儿童故事画报·发现号趣味百科(2015年10期)2016-01-20
作文与考试·小学低年级版(2014年11期)2014-11-05
小学阅读指南·高年级版(2014年2期)2014-05-27
