
铁路救援起重机仿真培训系统关键技术研究
2022-11-18 08:31:14周晓莉
科技与创新 2022年22期
周晓莉,曾 理
(1.成都运达科技股份有限公司,四川 成都 611731;2.西南交通大学智能控制与仿真工程研究中心,四川 成都 610031)
1 研究背景
长期以来,中国铁路救援人员的培训是通过书本、多媒体课件理论学习和在演练线上实作的方式进行。这种培训方式局限于演练线的地形地貌、起吊对象类型,很难根据不同情况进行针对性预案训练,且实践演练机会极少。当真正投入救援时,易出现救援人员面对复杂情况手足无措的局面。
为适应铁路发展的需要,提高铁路发生意外事故时的救援能力和效率,中国国家铁路集团有限公司已在全路建立若干个铁路救援中心(基地),并从国外引进了大量先进的救援起重机。在配备新型救援设备以后,如何采用现代培训手段加强日常培训,保证在需要时救援人员能够迅速采取合理的救援方案、熟练操作设备完成救援任务,充分发挥新型设备的效力,是亟待解决的现实问题。
美国GlobalSim 公司、瑞典ABB 公司、德国Crasy公司、加拿大Simlog 公司及Alberta 公司等早已广泛开展起重机仿真系统的研究和装备应用,国内香港大学、台湾大学、上海海事大学等也分别开展了关于起重机的驾驶仿真研究,但均较少涉及用于铁路救援起重机作业人员培训的仿真系统。成都运达科技股份有限公司与西南交通大学研究团队从2012 年开始合作研究铁路救援起重机仿真系统样机[1-4]。
本文从采用现代化手段培训铁路救援人员的需求出发,以近年来中国国家铁路集团有限公司大力引进并配置到全路各个救援中心(基地)的德国KⅠROW公司的KRC1600 型铁路救援起重机作为仿真培训系统的仿真对象,开展以下4 方面的研究,实现了一种铁路救援起重机仿真培训系统:①设计救援起重机操纵仿真系统的软硬件架构;②建立救援起重机运行控制仿真模型;③建立救援起重机“车-吊索-负载”数学模型;④构建人、车、典型线路及地形地貌三维视景。
2 系统基本需求与结构设计
2.1 功能需求
对救援起重机驾驶员进行训练与考核的内容主要包括:①救援起重机的基本操作技能培训;②常规救援过程操作技能培训;③困难/恶劣环境条件下救援过程操作技能培训;④培训课程设计;⑤救援起重机操作技能考核。
2.2 设计需求
系统主要研究并实现以下主要仿真功能。
操纵环境仿真:与起重机司机室一致的仿真司机室,包括与实际一致的司机操纵台、操纵手柄、中央监控系统等设备,具有与实际一致的功能与操控力度为学员提供逼真的操作环境。
作业环境仿真:用视景与声音仿真来模拟救援现场的氛围,包括事故场景(事故车辆、机车的破坏程度、线路、建筑、自然环境)、模拟恶劣气候条件(黑夜、白昼)、各种事故状况(冲突、脱轨、颠覆)、各类限制条件(接触网、隧道、桥梁)、救援过程相关配合人员的特定行为及手势指令等,为学员提供较逼真的救援现场景象与氛围。
设备功能仿真:根据救援起重机的设备组成、系统结构、工作原理及控制机理,建立相应的原理与逻辑仿真模型,实现各种操纵及控制命令所对应的系统功能。主要包括救援起重机的走行/制动、支撑、上车体的旋转/回转、倾斜补偿、平衡锤与起重横梁的各种运动与控制功能。
作业过程仿真:在视景中模拟起重机起吊车辆/机车等救援过程,重点在于吊车、被吊物体、周边条件的相互动力作用过程仿真;需建立起重机、被吊物体、周边条件的力学模型并进行实时仿真计算,在视景中正确模拟起吊过程中吊机与被吊物体及周边条件的动态运动或变化过程,为受训学员提供正确、形象的作业过程动态场景;配以必要的声音模拟,为学员提供沉浸感较强的现场氛围;模拟施救指挥人员的手势指令及必要的施救配合人员的正常行为。
训练课程设置:提供典型线路及地形地貌三维场景数据库,建立典型车辆、机车的模型库,由教员根据典型案例或培训需要设计事故场景,可设置车辆/机车的损毁状态与程度、车辆/机车及设备的分布(散落、重叠)状况。
训练过程评价:设定作业过程评价指标,建立作业过程评价模型和评价方法,提供多种形式的评价结果。
2.3 系统结构设计
结合课题组在列车驾驶仿真培训系统的多年研发经验以及铁路救援起重机操作人员培训的实际需求,提出了使用基于分布式计算机实时仿真技术来构建本系统。
系统主要组成包括司机室、操纵台接口系统、作业仿真主控系统、教员监控系统、视景仿真系统、声音仿真系统、CCTV 监视系统、学员观摩系统等,上述系统通过计算机局域网构成人在回路中的、交互控制、分布式实时仿真培训系统。铁路救援起重机仿真培训系统结构如图1 所示。
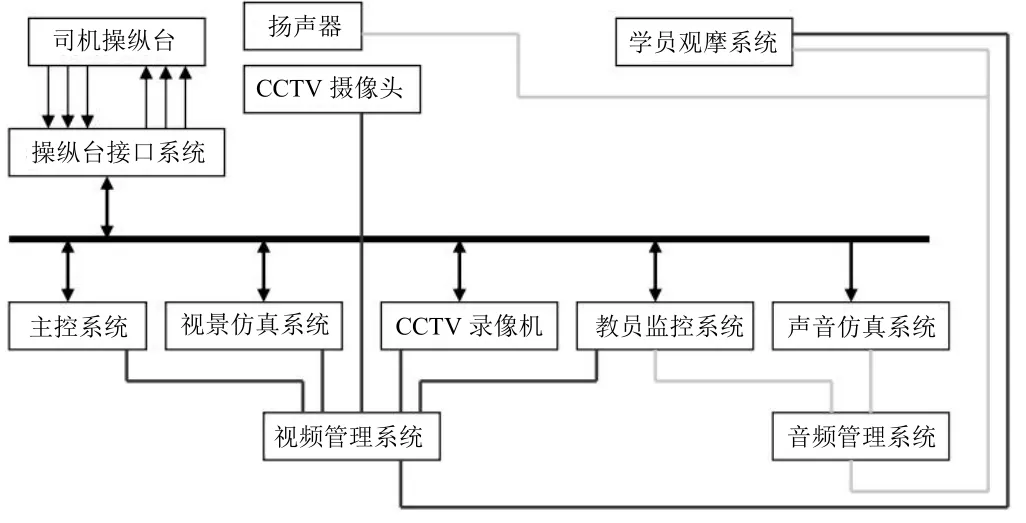
图1 铁路救援起重机仿真培训系统结构图
系统分为教员端和学员端。学员端主要仿真学员在救援过程的视、听、触等方面的操作、感受;教员端主要实现对学员行为的指导、监控、评价。铁路救援起重机仿真培训系统软件结构如图2 所示。
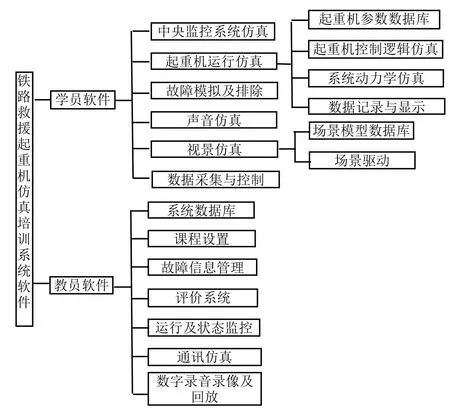
图2 铁路救援起重机仿真培训系统软件结构图
3 关键技术研究
系统研究涉及物理模型与数学模型建立、系统动力学、仿真算法设计、计算机图形学应用、人工智能技术、计算机信息技术、控制原理仿真等学科知识[3]。本文主要对以下关键技术进行研究。
3.1 起重机控制逻辑仿真
起重机控制逻辑负责完成对起重机对象所有控制行为的仿真,主要包括起重机电路控制逻辑、柴油机电控逻辑、液压/气压系统液控逻辑[4]。
起重机所有的控制逻辑均来自于技术图纸(电路图、液压/气压图),包含如下功能:实现起重机控制逻辑;完成逻辑源的加载;完成简单的与非或逻辑运算;完成简单的传感器类型的运算,输入为模拟量,输出为数字量;模拟集成式芯片的运算,具有复杂的逻辑判断功能;模拟液压系统元器件的工作方式,输入可为模拟量/数字量,输出可为模拟量/数字量。
从软件功能角度来说,逻辑模块应能完成符合其逻辑源规则的所有逻辑的加载、逻辑输入的实时改变及逻辑结果的输出。逻辑模块的解算源,通过分析起重机原理图得到,并转化形成Excel 表逻辑源。由于气压系统属于救援起重机辅助控制系统,仿真原理仿照液压系统处理。
逻辑模块首先加载逻辑源数据文件,然后调用逻辑模块进行步进运算、改变逻辑的输入项或获取逻辑解算结果。
3.2 建立“车-吊索-负载”数学模型
建立力学及操纵性能数学模型,包括物理模型和碰撞模型,实现救援起重机动力学的实时精确仿真。
3.2.1 物理模型
KRC1600 型铁路救援起重机由吊钩升降、变幅、吊臂伸缩、回转、摆动、自力走行、配重移动和支腿旋转8 个部分组成了救援起重机的动作机构[3]。根据对KRC1600 型救援起重机结构和机构的分析,构建如图3 所示的救援起重机的树状层次结构,并分别建立了其碰撞模型和动力学模型。
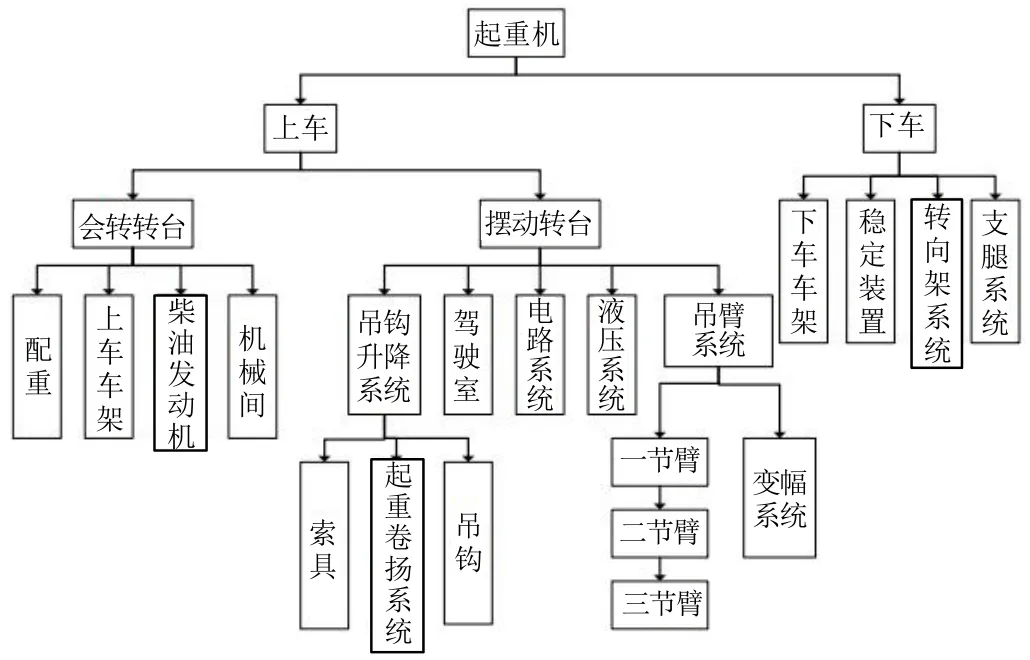
图3 KRC1600 型铁路救援起重机的树状层次模型
整个救援起重机的物理模型又分为操作模型和吊装模型2 部分,如图4 所示。

图4 KRC1600 型铁路救援起重机物理模型示意图
操作模型包括上下车车架、转盘、配重和起重机臂等机构,使用闭环前向运动学,根据起重机每个刚体部分之间的关系变换矩阵逐个构建起重机铰接机构的模型。变换矩阵信息能够在起重机操作过程中确认操作模型上每一点的状态。与吊索和起重机起吊部分相比,操作振动和负载变形的动力学属性不明显,本模型中暂不考虑。
吊装模型包括吊索和吊钩,在游戏领域广泛使用基于约束的刚体动力学方法构建。通过构建施加在实物上的约束模型,如铰链限制、接触点、摩擦力和阻尼等获得物理反应,模拟吊索摆动和物体碰撞等。
利用物理引擎PhysX,根据救援起重机的骨架模型,建立刚体模型,并将刚体设置成“运动的”(Kinematic)可完成操作模型的构建。根据吊装模型的铰链配置,基于PhysX 中的铰链修改后,可完成吊索模型的构建。
3.2.2 碰撞模型
基于起重机树状层次模型结构,利用简单的碰撞几何体如长方体、球体、圆柱体等拼接组成起重机外形轮廓,简化模型复杂度,既能实现有效的碰撞检测功能,又能降低系统碰撞检测运算负担。
通过以上动力学模块的实现,建立了“车-吊索-负载”的动力学交互模型。
3.3 建立人、车、环境三维模型库
视景系统需完成以下任务:虚拟视觉驱动,包括3D 模型的驱动以及各种视觉效果的实现等;场景模型的建立,包括路轨、铁路救援基地(中心),救援现场;铁路救援起重机模型的建立与加入;被救援负载模型的建立与加入;响应主控系统网络命令;第三视角人物交互,完成参与救援人员人物模型的加入。车、环境三维模型如图5 所示。

图5 车、环境模型截图
在3D 模型建立完成后,视景子系统主要通过Unity 软件实现模型驱动,结合Microsoft Visual Studio 2010 开发环境,运用C#编程语言、使用Photon 网络引擎SDK,实现软件及底层网络通讯的开发。最终建立“人-车-环境”三位一体的虚拟仿真环境,虚拟环境中的各种物体均有质量、形体、速度、加速度等物理属性,物体间可发生交互作用(例如碰撞检测、物体间的自由度约束)。
4 研究成果
建立了铁路救援起重机“车-吊索-负载”的动力学交互模型,为保证仿真的实时性和真实性奠定基础。建立了铁路救援起重机运行控制仿真模型,实现了铁路救援起重机控制性能的全方位仿真技术,填补了国内在该领域的空白。建立了铁路救援场景课程编辑工具,可完成各种不同地形、不同救援场景的课程设计。完成了铁路救援起重机仿真培训系统研制,相关资料显示,该系统是国内第一套应用于现场培训的铁路救援起重机仿真培训系统。系统现场运行情况如图6所示。

图6 系统现场运行情况
5 结论
目前该系统已在成都机务段实际应用,增加了救援起重机司机的实作练习机会,显著缩短了培训时间,提高了培训效率,提升了培训效果。随着中国铁路的快速发展,各路局陆续配备了众多新型号的铁路救援起重机,甚至包含多种国外引进的型号。由于技术资料缺乏、新型起重机配置到各救援基地时间较短,使用单位对起重机的使用、操作、训练、实作经验尚处于积累阶段,课题组对仿真对象的理解深度尚有局限。后续将在控制电路图和液压系统图的消化吸收等方面继续努力,通过进一步研究和成果转化,协助用户建立功能齐全、技术先进的铁路救援起重机操作人员技能培训体系,为用户单位节省课堂授课及实车作业培训费用,有效提高培训效果,减少操作人员在起重作业过程中因业务知识不熟或突发状况造成的事故。
猜你喜欢
法律方法(2022年2期)2022-10-20 06:44:24
中学生百科·大语文(2021年11期)2021-12-05 14:27:54
纺织科学研究(2021年7期)2021-08-14 01:42:34
铁道科学与工程学报(2021年1期)2021-02-26 03:54:18
福建交通科技(2019年3期)2019-07-15 03:11:24
中国特种设备安全(2018年10期)2018-12-18 02:16:46
石油化工建设(2018年2期)2018-07-11 01:24:56
37°女人(2017年11期)2017-11-14 20:27:40
电气化铁道(2017年1期)2017-04-16 06:00:17
大连理工大学学报(2016年6期)2016-12-08 02:52:51
