
车路协同环境下高速公路货车换道速度优化
2022-11-17 07:51李佳洋
物流科技 2022年17期
姚 佼,李佳洋,陈 信
(上海理工大学 管理学院,上海 200093)
0 引 言
随着交通物流业的快速发展,货车在运输方面承担的比重逐渐增加,特别是对于长距离运输的高速公路,货车比重日益提高。由于其车型尺寸大、行驶速度慢等特点,运行过程中体现出与其周围车辆在加速度、相对速度以及车间距等方面的显著差异[1]。特别是其作为高速公路的移动瓶颈,换道过程对高速公路交通流的状态影响尤为显著,对该过程的货车速度进行优化,给出合理建议,可以有效降低对高速公路交通流运行的扰动,以及交通拥堵的发生概率。
国内外关于高速公路货车换道的研究,目前主要是在货车换道规则[2]、货车车道本身[3]以及货车可变限速控制[4]等方面,对于周围车辆以及通行效率低的影响等考虑不足。另一方面,车路协同技术的发展,高速公路上当货车换道时,通过车车通信可以实时感知周围车辆的速度、加速度以及位置等状态信息,用于指导换道过程的换道时刻、速度和加速度等决策。孟永帅[5]阐述了车路协同技术的基本概念,该技术可以收集道路以及环境等数据信息,实现车路和车车实时信息交互,根据车道状况帮助驾驶员完成换道决策。张毅等[6]借助车路协同系统,提高信息共享范围和传递的实时性。燕崇麟[7]利用传感器将高速公路的信息通过车路协同系统传送到车载端,为驾驶员提供全面的信息和安全。李原[8]研究以毫米波雷达为主要感知设备搭建车路协同系统的可行性。杨晓光等[9]构建基于车车通信的换道超车辅助系统,有助于提高车辆行驶速度。辛晓鹰[10]提出针对货车换道产生视野盲区的换道安全提示系统。李娟等[11]设计基于车路协同技术的车辆换道辅助系统,借助该系统,驾驶员能够更快做出更正确的换道决策,提高换道安全性和行驶效率。由于货车运输有严格的时效性要求,通过车路协同系统,帮助货车驾驶员更快做出换道决策,为节省运输时间,但仍需对换道过程中货车速度进行优化研究,保证更加快速安全平稳完成换道行为。
国内外对货车车辆换道行为与跟驰的特性研究,将最优速度函数引入跟驰模型中,其研究主要集中在基于其跟驰模型研究分析交通流稳定性。Bando 等[12]提出了车辆跟驰模型,称之为最优速度(Optimal Velocity,OV) 模型,其能够模拟车辆的跟车行驶等实际交通情况,分析交通流的稳定性。Zhang L 等[13]提出一种最优速度函数,修改OV 模型。Helbing 和Tilch[14]对OV 模型进行改进,引入了负速度差,提出了广义力(Generalized Force,GF) 模型,标定模型中参数。Jiang 等[15]改进GF 模型,提出了全速度差(Full Velocity Difference,FVD) 模型,考虑正速度差的影响。Li 等[16]以FVD 模型为例,对局部稳定性分析和渐近稳定性两方面进行研究分析,并对其进行了非线性分析。
微观车辆模型能够直观反映宏观交通流的运行特性,但其对货车换道过程中车辆行为特性和产生侧向偏移的影响没有全面考虑。因此,基于最优速度的OV 模型,通过车路协同系统,分阶段分析货车换道过程中的纵向减速度和横向加速度,及该过程中周围车辆的影响及权重,建立了高速公路的货车换道速度最优模型,提高货车换道的效率、降低交通事故和保障换道安全。
1 车路协同环境下货车换道行为描述
车路协同系统是采用新一代的互联网等技术,将人、车、路三者进行链接起来,实现车—车、车—路的全方位的实时信息交互。当货车行驶在高速公路双车道的超车道中间位置,将进行换道行为时,与周围的车辆保持一定的安全距离,基于车路协同系统,在超视距感知场景下,换道货车完成对周边环境的感知,利用网联平台,使后方行驶车辆感知范围以外的环境状态,后方车辆获得前方由于货车造成交通拥堵的信息后,平台对前方行驶的货车发出换道指令,通过对采集的周围车辆的数据信息分析研究,货车驾驶员能够做出更正确的换道决策,平稳安全完成换道行为。
货车在双向四车道高速公路上一般在右侧车道行驶,小汽车在左侧车道行驶,货车在换道过程中,选择在左侧车道行驶,考虑货车本身的行驶特点后,改变速度进行换道行为。原车道上行驶的货车CT 为图中的换道车辆,其全称为Chang Truck,货车CT 前方行驶的车辆LC 全称为Lead Car,在目标车道上行驶的前方货车LT 全称为Lead Truck,在目标车道上行驶的后方车辆FT 全称为Follow Truck,如图1 所示。

图1 换道前车辆分布位置图
在穿过车道的分界线前,认为货车CT 在原车道行驶,穿过车道的分界线,认为其在目标车道行驶,当其到达目标车道的中线位置时,立即跟随前车进行跟驰。假设货车CT 在换道前后,道路上所有车辆在车道的中线位置正常行驶,所以货车CT换道过程中的总的横向位移量为两条车道的中线距离L,货车CT 在换道过程中,从左侧车道运动到右侧车道,车辆的运动偏移量为d,如图2 所示。
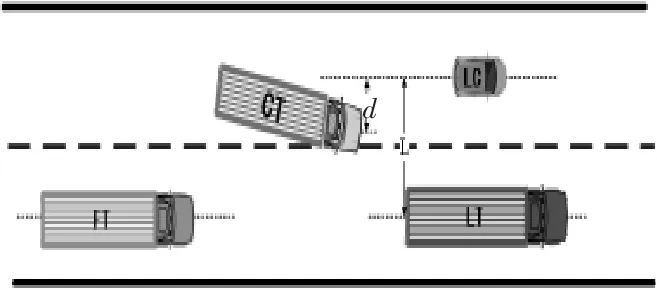
图2 换道货车的横向位移图
设换道货车车辆CT 的换道未完成率为η,即货车CT 的总横向位移量L 与其横向位移量d 之差与总横向位移量L 之比:

式中:η 为换道货车CT 的换道未完成率,L 为车辆总横向位移量,d 为车辆的横向位移量,并且η∈(0,1 )。
2 考虑横向距离的速度优化模型
基于车辆的跟驰理论和刺激反应理论,考虑周围车辆对换道货车的影响,建立综合换道货车与目标车道货车间横向距离的换道驾驶行为的统一模型,目标货车CT 的换道研究过程如下:
第一步,确定换道货车CT 的初始时刻的车辆行驶状态,即换道货车CT 零时刻的状态。
第二步,确定换道货车CT 周围车辆LT、FT 以及LC 的行驶状态,前车LC 的状态对目标货车CT 的换道行为有重要影响,货车LT 在换道货车CT 前面行驶,其行驶状态对换道货车CT 的速度变化有一定的影响,否则易出现换道货车CT 与货车LT 发生追尾情况;货车FT 在换道货车CT 后面行驶,其行驶状态对换道货车CT 的影响最为重要,因为目标车道上的后车能够直接影响换道货车能否完成换道行为。
最后,分阶段分析了货车换道过程中的纵向减速度和横向加速度,及该过程中周围不同车辆的影响及权重,建立了高速公路的货车换道最优速度模型,综合换道货车和周围车辆的数据信息,进行仿真设计。
在优化货车CT 的换道速度过程中,建立坐标系:x 轴方向表示换道货车的纵向行驶方向,y 轴表示换道货车的侧移方向,即横向行驶方向,从x 轴和y 轴方向对换道货车CT 的加速度进行研究分析,如图3所示。
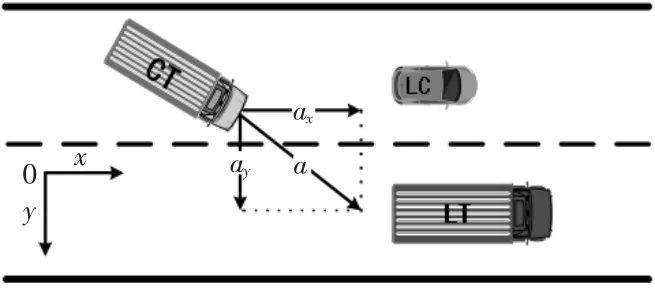
图3 换道货车加速度分解图
2.1 换道货车的加速度分析
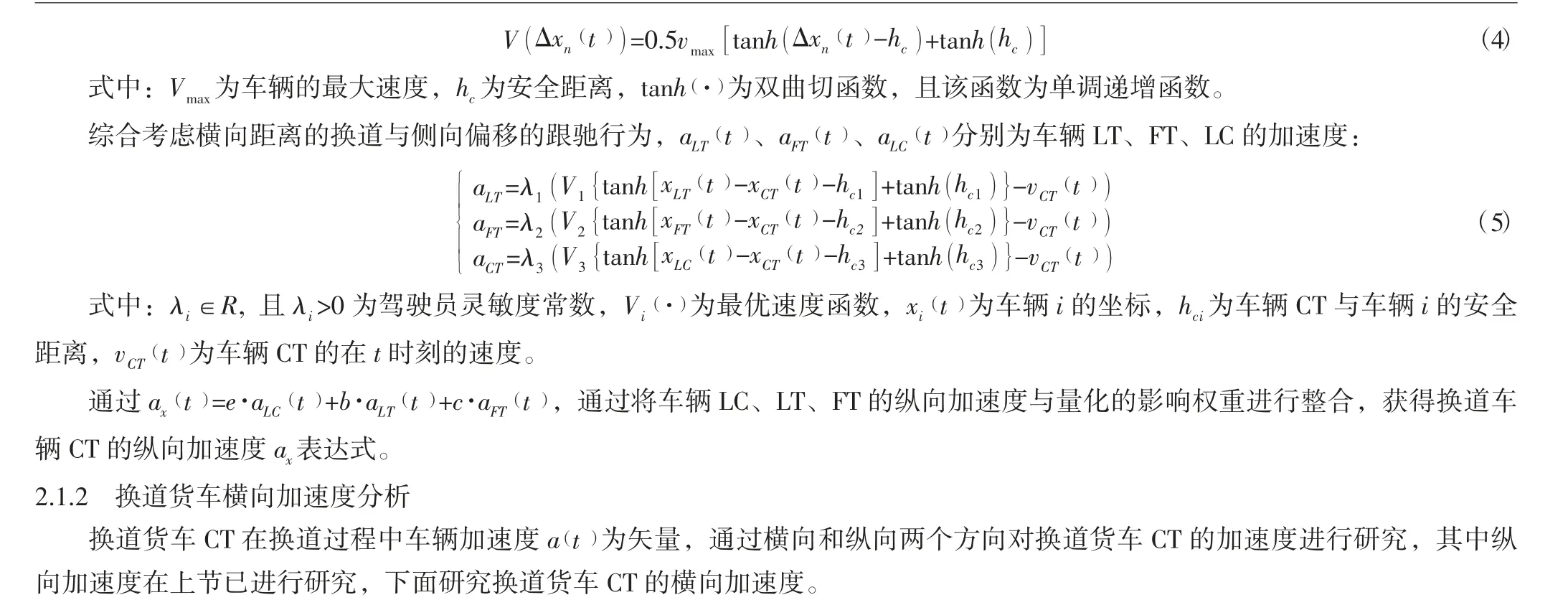
2.1.1 换道货车纵向加速度分析
对于换道货车CT 在换道过程中纵向加速度的研究,可以用e、b、c 三个字母来分别表示其对原车道前车LC、目标车道前车LT 与后车FT 的交互影响权重。换道过程中,车辆间横向距离影响权重的变化,可以分为换道开始时刻、换道跨线时刻以及换道结束时刻,如图4 所示。

图4 影响权重变化图

综上所述,将整个换道过程分为两个阶段,第一阶段换道货车CT 从原车道中线运动到车道分界线(即从图4(a) 至图4(b) 的过程),第二阶段换道货车CT 从车道分界线运动到目标车道中线(即从图4(b) 至图4(c) 的过程),通过上述对货车车辆CT 对周围车辆的影响权重e、b、c 的量化,获得换道货车CT 的纵向加速度:

基于最优速度(Optimal Velocity) 模型的基本函数,假设每辆车都有法定的速度,该法定速度取决于前车与后车之间的跟驰距离大小,忽略车辆本身长度影响,驾驶员对前车的刺激都会做出反应,通过踩油门和刹车来控制车辆的行驶,通过这种根据前车的运动来保持后车本身的合理法定速度,提出最优速度模型:

假设换道货车CT 在时间t=0 时刻开始进行换道,整个换道过程由两部分组成,第一部分,换道货车CT 在时间tadj间隔内调整货车的纵向速度和车辆间距,第二部分,换道货车CT 应用横向加速度合并行驶到目标车道上,完成货车的换道行为。换句话说,tadj为换道货车CT 在开始换道行驶到目标车道之前调整货车的纵向速度等所需的时间,除换道货车CT 外,假设其周围车辆的横向加速度为零。
在研究换道货车CT 在换道过程中,假定设计一个简单而符合实际道路上换道行为特性的模型,通过它来描述换道货车CT的横向加速度。货车本身在换道过程中发生横向位移,货车的横向加速度为[18]:

根据换道货车CT 的横向加速表达式,在货车换道前半部分的横向位移中,货车的换道时间在tc/2 内,换道货车的横向加速度大于0;在后半部分的横向位移中,横向加速度小于0。
2.2 换道货车的速度优化模型
根据上两节的分析基于换道过程中货车在纵向与横向的加速度,得到换道货车CT 在换道过程中的加速度a(t ),最后通过换道货车CT 的加速度,获得货车换道的最优速度:

3 案例仿真分析与验证
3.1 仿真场景与参数设计
以杭州市第二绕城高速作为研究对象,选取其中杭州到绍兴路段长1.5 千米的杭州西复线路段,该路段设置安装了毫米波雷达,共有5 处点位,如图5 所示,布设路段的运营桩号为K95+880-K96+880,如表1 所示。

图5 选取的研究路段

表1 设备分布表
通过这些装置,共采集不少于200 组的所需货车换道数据,数据主要内容为货车的加速度、速度和车辆坐标、原车道和目标车道上车辆的速度等;将采集的数据信息以时间为基准进行叠加分析[19]。OV 模型中的关键参数为敏感常数λ、货车最大速度Vmax和安全距离hi,其中货车最大速度Vmax为该路段允许行驶最大速度,本文取27.7m/s,货车司机的敏感系数λ 和安全距离hi通过实测数据拟合确定,其范围和取值具体如表2 所示。

表2 最优速度的换道模型参数取值
假设目标货车CT 能够执行换道模型给出驾驶行为,驾驶员也能够完全控制货车CT 在高速道路上行驶;选择示范的换道场景,设计高速公路货车换道的仿真环境,即研究的目标货车CT 加速进行换道行为,行驶进入原车道相邻的目标车道[20]。
将换道货车初始速度设置为14m/s,原车道上的车辆LC 和目标车道上车辆LT 和FT 的初始速度设置为18m/s,、17m/s 和14m/s。高速公路上车辆间的车头距离设置为100m;在整个目标货车CT 加速换道过程中,将原车道上的车辆LC 和目标车道上货车LT 和FT 在高速公路上的行驶状态分为以下3 种情况:
(1) 场景1:原车道上行驶的车辆LC 以0.3m/s2进行加速行驶,车辆LC 的速度由初始速度18m/s,增大到21m/s,目标车道上行驶的货车LT 和FT 在道路上匀速行驶。
(2) 场景2:目标车道上行驶的前面货车LT 以0.3m/s2进行加速行驶,车辆LT 的速度由初始速度17m/s,增大到20m/s,原车道上行驶的车辆LC 和目标车道上后面行驶的货车FT 在道路上均匀速行驶。
(3) 场景3:目标车道上行驶的后面货车FT 以0.3m/s2进行加速行驶,车辆FT 的速度由初始速度14m/s,增大到17m/s,原车道上行驶的车辆LC 和目标车道上后面行驶的货车LT 在道路上均匀速行驶。
换道货车CT 在高速道路上行驶过程中,速度最优模型实时向货车的驾驶员提供合适的行驶加速度,根据提供的行驶加速度,并且结合上述的仿真假设,最终获得换道车辆CT 在换道过程中货车的行驶速度。
3.2 仿真结果
对换道货车CT 进行仿真,通过对在原车道和目标车道上的行驶车辆在不同的运动状态下进行研究,获得换道车辆CT 在换道过程中货车自身的加速度和速度随时间变化的曲线如图6 和图7 所示。

图6 换道货车CT 加速度变化曲线
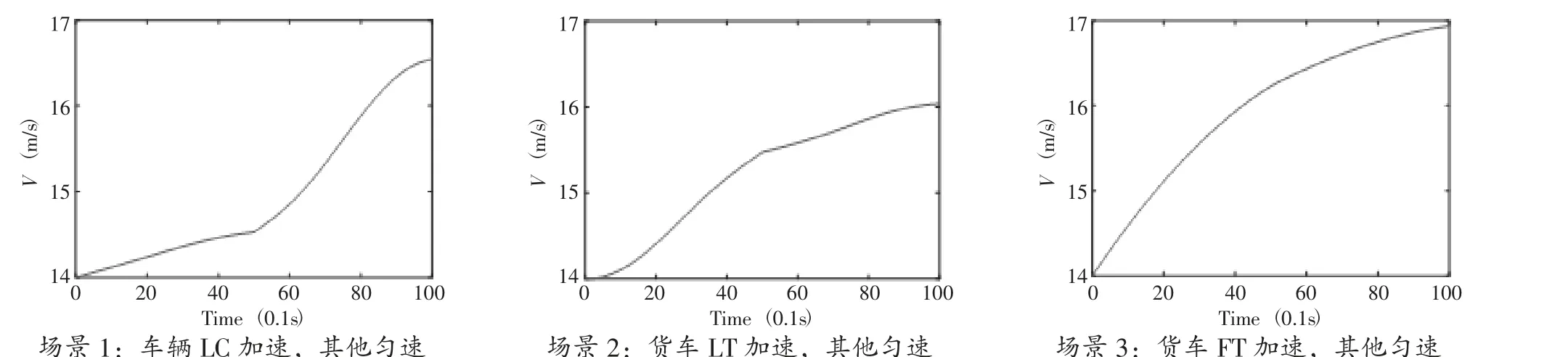
图7 换道货车CT 速度变化曲线
从中可以看出:在场景1 的环境下,由于换道货车CT 的加速度受车辆LC 影响,其从原车道中线运动到车道分界线过程中,货车CT 的加速度变化呈缓慢的先上升后下降的趋势,其速度变化从14m/s 增加到14.4m/s,呈缓慢上升的趋势;当换道货车CT 开始从车道分界线运动到目标车道中线过程中,车辆LC 对其行驶状态影响为零,货车CT 的加速度和速度呈快速的上升趋势,货车CT 换道速度从14.4m/s 快速增加到15.9m/s,加速完成货车CT 的换道行为,节省换道货车的换道总时间。
在场景2 的环境下,换道货车CT 从原车道中线运动到车道分界线过程中,其加速度和速度的变化呈较快速的上升趋势,货车CT 换道速度从14m/s 快速增加到15.6m/s,节省其换道的总时间;当换道货车CT 开始从车道分界线运动到目标车道中线过程中,受目标车道上前面行驶的货车LT 影响,货车CT 虽进行加速行驶,但其加速度变化开始呈下降趋势,速度变化从15.6m/s 增加到16.1m/s,呈较缓慢的上升趋势,避免与货车LT 发生追尾,完全平稳的完成货车CT 的换道行为。
在场景3 环境下,由于目标车道上的货车FT 加速行驶的影响,换道货车CT 在开始进行换道行为时,以1m/s2的加速度行驶,提高车速,避免在换道过程中货车FT 与其发生碰撞,货车CT 虽进行加速换道行为,考虑匀速行驶的车辆影响,其加速度变化呈下降趋势,整个换道过程中,货车CT 速度从14m/s 较稳定增加到16.9m/s,安全完成其换道行为。
图6 与图7 表明,在目标货车CT 在换道过程中,其周围的车辆LC、LT 和FT 在不同的行驶状态下,换道货车CT 都可以做出相应的驾驶决策,其加速度和速度变化与实际的货车加速换道行为特性相吻合,安全平稳的完成货车的换道行为。
4 结 论
本文基于OV 模型,建立一个综合考虑换道货车与其周围车辆间横向距离的速度最优模型。通过仿真分析发现,面对周围车辆在不同行驶状态下,目标货车通过该模型能够让货车的换道速度随时间变化而保持较稳定的增长趋势,提高换道效率,安全平稳地完成货车换道行为。主要的结论如下:
(1) 基于最优速度OV 模型,分阶段分析了货车换道过程中的纵向减速度和横向加速度,及该过程中周围不同车辆的影响及权重,并进一步考虑换道货车行驶过程中跟驰行为和换道行为横向距离的影响因素,建立了高速公路货车换道最优速度OV 模型。
(2) 通过车路协同系统,获得换道货车及周围车辆的实时数据信息,进一步确定最优速度OV 模型的参数,并设计在3种换道场景,通过速度优化模型实时向货车的驾驶员提供建议的行驶加速度,进一步给出其换道过程中的建议行驶速度,完成目标货车的加速换道,研究成果为货车的安全换道与平稳行驶提供理论依据。
本研究的模型是假设车辆安全距离恒定,进而研究基于最优速度OV 模型对高速公路货车换道速度优化,然而实际中由于车辆驾驶员差异性,特别是对于货车,安全距离的波动,可能带来对交通流的扰动,带来蝴蝶效应,在后续的研究中进一步分析。
猜你喜欢
幼儿画刊(2023年12期)2024-01-15
卫星应用(2021年11期)2022-01-19
科学大众(2021年9期)2021-07-16
中国交通信息化(2020年11期)2021-01-14
汽车观察(2019年2期)2019-03-15
中国交通信息化(2018年12期)2018-03-21
中国交通信息化(2017年8期)2017-06-06
学与玩(2017年6期)2017-02-16
专用汽车(2016年9期)2016-03-01
中国交通信息化(2015年10期)2015-06-06
