
地震探测无人机遥控震源实验研究
2022-11-16 14:07吴志勇钱荣毅马振宁张俊刘旭
科学技术与工程 2022年29期
吴志勇, 钱荣毅, 马振宁, 张俊, 刘旭
(中国地质大学(北京)地球物理与信息技术学院, 北京 100083)
主动源地震勘探是获取地下介质信息的一种高分辨率方法,震源是保证地震勘探数据采集质量最重要的装备之一。在不同介质条件下,特定震源所产生的地震信号受到炮点附近地表及地下情况影响[1-2],因此根据不同地质条件选择合适的震源至关重要。
地震勘探中有着多种类型的勘探震源,为了获得不同震源的属性参数,前人开展了大量的震源对比实验,为不同介质条件下的勘探震源选择提供了参考[1-5]。在众多震源中,炸药震源和可控震源在地震勘探中使用最为广泛。然而,炸药震源对环境的破坏性大、危险性高、钻孔成本高;可控震源价格昂贵,难以进入地形起伏大、空间狭小的区域内[6-7]。近年来随着人们越发重视环境保护和减少能源消耗,许多环境友好型、低消耗的震源得以研发和使用[8-9]。
现代地震勘探常要面对高山、戈壁悬崖、河流沼泽等复杂而具有危险性的勘探区域[10],复杂多变的地震地质条件对传统震源的使用造成了极大的限制。特别是在水域、沼泽等人员难以涉足的场地,勘探工作难以开展,造成数据资料缺失,对实现高质量的地震勘探数据采集非常不利。然而,现今还没有满足陡峭山地、沼泽湿地、湍急河流及高覆盖率森林区域的环保、高效和低成本的震源。
无人机可搭载摄像机等外部设备进行工作,在地震勘探的测量定位和选线中已得到了广泛应用,如通过无人机航拍摄影获得地面图像,实现精准踏勘,结合地形高程数据等获得地面地形特征等[11-12]、通过无人机获得测区内断崖、河流岸线等信息,实现无人机放线[13],使用无人机搭载无线设备在测区范围内实现数据传输[14]等。Greenwood 等[15]关注到无人机经济高效、不受地形限制的特点,利用无人机携带重物在15 m以下的低空条件下进行几组采集实验。然而,仅在一片平坦空旷的场地下完成了小能量的面波激发实验,无法验证该方法能否应用于对震源能量要求更高的反射波地震勘探。
为了得到更大的震源激发能量,现将冲击单元的质量提升至4 kg,飞行高度提升至500 m,在高空中大质量的冲击单元具有更大的重力势能,以拥有更大的激发能量。为了探究无人机遥控震源的能量输出和在不同地质条件下的勘探性能,在河北洋河实验区开展无人机遥控震源不同激发能量的采集实验、与5台可控震源车的对比实验和水体内激发采集实验,分析地震单炮记录在反射波的能量、频带和信噪比等方面的特征和差异。
1 无人机遥控震源
无人机遥控震源的原理是由多旋翼无人机携带冲击单元飞行至高空,利用冲击单元在高空中所具有的重力势能在下落过程中转化为动能并在落地时冲击地面,实现强能量的地震波激发。无人机遥控震源如图1所示,主要由载重多旋翼无人机、悬挂投掷系统以及冲击单元三部分组成。大疆经纬M600型无人机作为震源的载重工具,为震源的升空、定位等提供动力支持,其最大载重为6 kg,最大飞行高度为500 m;悬挂投掷系统连接载重无人机及冲击单元;冲击单元实现地震波激发。

图1 无人机遥控震源
无人机遥控震源使用时,首先在低空中对震源进行精确定位并垂直上升到指定高度,减小在高空中由于定位不准确可能造成的定位偏差。当无人机遥控震源上升到炮点上方指定高度,地面操作人员控制悬挂系统打开开关,投掷冲击单元实现精确的炮点激发。
在高山戈壁、河流沼泽等复杂环境下,震源设备的布置和地面车辆交通常受到地表地质条件的限制,造成震源设备难以到达、人员受险等问题。无人机遥控震源发挥了空中作业的优势,由实验人员在远处操纵设备进行工作,避免人员进入危险区域。无人机起飞后可在空中进行位置迁移并投掷冲击单元激发地震波,摆脱了场地环境的限制,避免由于地面环境可能造成的数据缺失,对复杂环境下的高质量地震勘探具有重要意义。
2 实验区概况
实验区位于河北省张家口市涿鹿县洋河流域,如图2所示,位于怀涿盆地,第四系在盆地内部及河流、沟谷一带广泛分布,为河湖相堆积。下伏河湖相黏土层、砂层及砾石层;上覆坡洪积黄土,局部夹砾石层[16-17]。实验区地表情况如图3所示,主要为沙地介质,局部出露卵石层、水体等,地面芦苇、灌木丛等植被生长密集,炸药震源和落锤震源等传统震源的使用和地面仪器布置都受到了限制,并且无法在该水体内部实现勘探激发。无人机遥控震源操作简单,在高空中投掷冲击单元并实现地表地震波激发,不受限于地面复杂多变的场地条件,能够实现水中勘探激发;实验区内开阔空旷的场地环境也确保了无人机遥控震源使用的安全性。河湖相堆积的卵石层是实验区内一勘探难点。一方面,沙地、卵石层交织发育对数据的吸收衰减影响严重,造成地震数据反射波能量弱、主频低、频带范围窄以及干扰波发育等问题;另一方面,卵石层堆积结构复杂,层内潜水面深度不一,难以确定合适的成井深度[18]。

图2 实验区位置图

图3 实验区地表情况
3 野外采集实验
在实验中使用无人机遥控震源搭配Aries地震采集系统,测线横跨洋河河道,如图2所示,道间距为20 m。在实验区内,首先开展了无人机遥控震源不同激发能量的采集实验,由无人机携带2 kg及4 kg的冲击单元分别进行采集实验,探究不同质量的冲击单元对震源勘探效果的影响;紧接着开展了无人机遥控震源与5台可控震源车之间的对比实验,探究无人机遥控震源在实际工作中的勘探效果;最后,开展了水体内的无人机遥控震源采集实验,探究其在浅水区域的勘探性能。
3.1 无人机遥控震源采集实验
沙地介质下无人机遥控震源携带2 kg和4 kg冲击单元采集的地震单炮记录及其频谱如图4所示,其中自动增益控制(automatic gain control, AGC)参数为300 ms,滤波参数为20~25~100~120 Hz。冲击单元质量增加,震源的输出能量和探测深度得到了明显提升。考虑地震波的能量与其平方振幅成正比,通过计算地震单炮记录中近偏移距的最大绝对振幅平方值之和表征震源能量[19],采用该方法计算得到4 kg冲击单元的输出能量约为2 kg冲击单元的1.6倍。在地震单炮记录中,二者在浅层均获得了强能量的反射波信号,深层能量有所减弱。如图4(a)所示的2 kg冲击单元地震单炮记录中,初至波传播距离为900 m,450 ms时窗内的反射波信号清晰,图4(b)所示的4 kg冲击单元地震单炮记录中,初至波传播距离达940 m,可识别650 ms时窗内的反射波信号。相较于2 kg冲击单元,4 kg冲击单元地震单炮记录的初至波传播距离并没有明显提升,但这一结果受到了低频噪声和排列长度的影响。由于测线经过了大范围的村庄,数据中存在大量的低频噪声,在地震单炮记录中都有不同程度的体现。2 kg冲击单元地震单炮记录中远偏移距信号的连续性差,4 kg冲击单元地震单炮记录中数据的抗干扰性强,同相轴连续性好,数据信噪比更高,可见增加冲击单元质量同样提升了数据信噪比。如图4(c)和图4(d)的频谱中,4 kg冲击单元地震单炮记录频谱20~40 Hz以及60~100 Hz频段内的数据振幅明显高于2 kg冲击单元。

图4 沙地介质无人机遥控震源地震单炮记录及其频谱
实验表明,增加冲击单元质量能够有效提升震源的能量、频带和信噪比。4 kg冲击单元地震单炮记录的初至波传播距离达940 m,可识别650 ms双程旅行时的反射波信号,具有良好的勘探性能。
3.2 与5台可控震源车对比实验
为了探究无人机遥控震源在实际勘探工作中的使用效果,开展了与5台可控震源车之间的对比实验。无人机遥控震源携带的冲击单元质量为4 kg,飞行高度为500 m。如图5所示,5台可控震源车组合激发,激发时输出频带为5~80 Hz,扫描时间和监听时间分别为15 s和8 s。两种震源激发的地震单炮记录及其频谱如图6所示,其中AGC增益参数为300 ms,滤波参数为20~25~80~100 Hz。

图5 5台可控震源车
如图6(a)所示无人机遥控震源地震单炮记录中,初至波传播距离可达1 260 m,500 ms时窗内的反射波信号清晰。由于340~360道及260~300道测线范围经过当地村庄,该区域数据质量较差,但仍可辨析反射波信号。5台可控震源车850 ms时窗内的反射波同相轴连续,初至波在整个排列中都清晰可见,在测线经过村庄的范围内,5台可控震源车的数据并没有受到明显的低频噪声干扰,数据信噪比高。如红色框所示,无人机遥控震源在浅层的反射波信号与5台可控震源车相似,波组数量更多且能量更强,深层能量明显低于5台可控震源车,无法辨析800~850 ms时窗内的强反射波信号。在频谱中,无人机遥控震源在20~40 Hz和60~80 Hz内的能量要明显弱于5台可控震源车。

图6 地表激发地震单炮记录及其频谱
在对比实验中,无人机遥控震源地震单炮记录中初至波传播距离达1 260 m,500 ms时窗内的反射波信号清晰,浅层反射波波组数量多且能量强,但深层能量弱。
3.3 水体内激发采集实验
江水河流等浅水区域是地震勘探的一大难点所在,一方面由于大多数传统陆地震源无法在水中实现激发,另一方面水中勘探震源的使用成本高,运输困难,对水域通行条件要求高,受湍急水流影响大,且经济效益低。无人机遥控震源不仅可以实现水中地震波激发,其成本仅为在水中丢失的冲击单元,是水中勘探的一经济可靠的震源选择。无人机遥控震源携带4 kg冲击单元(飞行高度500 m)在水体中采集的地震单炮记录及其频谱如图7所示,其中AGC增益参数为300 ms,滤波参数为5~10~45~50 Hz。由于测线跨过水体而炮点位置位于水体内部,初至波形态呈现弧状。如图7(a)所示的地震单炮记录中,无人机遥控震源在水中同样获得了连续的反射波地震数据,初至波在整个排列中同相轴连续,能量很强,传播距离达1 660 m,如红色框所示,在150~700 ms时窗内可识别清晰的反射波信号,1 100~1 200 ms时窗内仍可辨析反射波信号,但数据受低频噪声干扰严重,远偏移距同相轴连续好、信噪比高。该水体深度仅5 m,水面、空气和水底形成了阻抗界面,激发引起了地震单炮记录中的多次波现象。冲击单元入水过程中,水中阻力削弱了冲击单元的能量,激发后水中噪声水平高,造成数据信噪比偏低。如图7(b)所示的频谱中,数据的主频为20 Hz且能量主要集中于20 Hz以下,能量衰减快且频带窄。
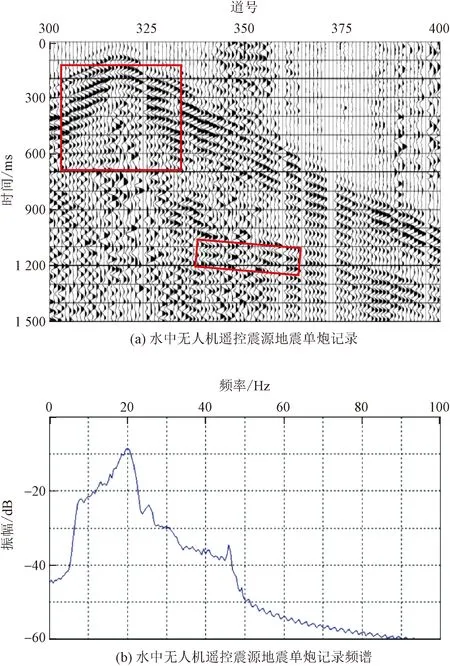
图7 水中无人机遥控震源地震单炮记录及其频谱
在水中的激发采集实验中,无人机遥控震源初至波传播距离达1 660 m,150~700 ms和1 100~1 200 ms时窗内反射波信号清晰,远偏移距数据同相轴连续,在水中具有良好的勘探性能,由于水深仅5m,还存在多次波和低信噪比的问题。
3.4 无人机遥控震源应用效果
在洋河实验区的一系列实验中,发现无人机遥控震源还展现出了经济环保的优点。无人机遥控震源在500 m高空中投掷冲击单元,对地表仅会造成可修复性的浅坑,对环境的破坏性小。其工作过程中仅有升降时必要的电能消耗,在地表激发对冲击单元并不会造成消耗,但不排除冲击单元在坚硬介质下可能引起的损坏以及在水体等介质中的丢失问题。因此无人机遥控震源的使用成本即为无人机自身价格、无人机遥控震源升降时的电能消耗以及冲击单元的丢失损耗。相较于昂贵的可控震源车等,无人机遥控震源显然是一款经济环保型的勘探震源。
在效率方面,无人机遥控震源单炮激发耗时为无人机震源的升空时间、冲击单元下落时间以及无人机返航时间的总和。以大疆经纬M600无人机、500 m投掷高度为例,无人机遥控震源激发单炮所耗费的时间约为4.5 min,包含震源升空时间100 s,冲击单元下落时间10 s和返航时间170 s。在实际工作中,还可通过使用高爬坡速度的无人机、采用大载重无人机携带多个冲击单元等方法,减少无人机在升空及返航方面所耗费的时间,进一步提高无人机遥控震源的效率。
4 结论
在河北洋河实验区开展的一系列采集实验表明,无人机遥控震源在卵石层介质下的勘探性能良好,具有操作简单、经济环保、适用性强的特点,是复杂环境下合适的勘探震源选择。
实验区内沙地、卵石层交织发育的地震地质条件削弱了反射波数据能量。地表激发的五台可控震源车地震单炮记录中可清晰识别850 ms时窗内的反射波信号;无人机遥控震源地震单炮记录中最深可识别650 ms双程旅行时的反射波信号,浅层反射波信号波组多且能量强,勘探性能良好;其在水体内激发采集的地震单炮记录中可识别1 200 ms双程旅行时的反射波信号,初至波在排列中的传播距离达1 660 m,是浅水区域优质的勘探震源,但由于水深仅5 m,地震单炮记录中还存在多次波的问题。无人机遥控震源对环境的破坏小,实验中仅消耗了无人机飞行所需的电能和水中丢失的冲击单元,是一款低成本的环境友好型震源。
震源激发过程中,激发时刻的记录十分重要,而在此次实验中未能准确记录炮点激发时刻。后续将通过在冲击单元中嵌入振动开关及无线电传输装置,由地面GPS系统接收记录冲击单元落地激发的时刻信号。
由于无人机震源的使用受到无人机机体载重和机体数量等方面的限制,可通过使用更大载重的无人机携带多个冲击单元分别控制激发或多架无人机同时工作,减少在升空降落过程中的消耗、提升无人机遥控震源的使用效率。在复杂多变的野外环境下,可大规模普及使用无人机遥控震源,保证实验人员安全性、拓展复杂环境下的勘探面积。未来,实现批量化、工业化的无人机遥控震源勘探,对地震勘探走向现代化、轻便化具有重大意义。
猜你喜欢
化工管理(2022年14期)2022-12-02
小学生优秀作文(低年级)(2021年11期)2021-12-06
东方考古(2021年0期)2021-07-22
语文世界(小学版)(2019年2期)2019-02-24
资源导刊(2018年9期)2018-09-10
山东工业技术(2016年15期)2016-12-01
小天使·一年级语数英综合(2014年7期)2014-06-26
环球时报(2012-03-28)2012-03-28
