
非线性多自由度系统的数据驱动建模和响应预测
2022-11-14 01:08蔡君同尹强丁千
振动工程学报 2022年5期
关键词:数据驱动
蔡君同 尹强 丁千











摘要:由于工程系统的复杂性和参数不确定性,利用力学原理建立的动力学控制方程常难以满足精度需求。基于数据驱动的系统建模和响应预测,利用动力学状态方程的数值解模拟实验中测得的不同外激励下的系统响应,并用于训练神经网络,构建包含训练数据间已知关系的损失函数以提高模型精度,得到表达系统状态关系的数据模型。将该神经网络模型纳入常微分方程求解器,可预测系统在不同激励下的响应,并获得幅频响应关系。将建模方法分别应用于含立方型和间隙型非线性的弹簧质量系统,计算结果表明,可根据响应数据建立准确的数据模型,并获得非线性系统主共振时的滞后和跳跃响应。研究还表明,训练数据越多、数据覆盖状态越完整,数据模型精度越好,且预测响应的误差越小。
关键词:非线性系统;数据驱动;系统建模;响应预测
中图分类号: O322;O313.3 文献标志码: A 文章编号:1004-4523(2022)05-1101-08
DOI:10.16385/j .cnki .issn .1004-4523.2022.05.007
引言
随着工程中研究对象的复杂化,建立准确的系统动力学控制方程越来越困难。利用力学原理,在各种假设条件基础上建立的模型,常常难以反映真实动力学特性,响应预测精度也往往难以满足要求[1]。大数据科学的快速发展为基于系统响应数据的动力学系统建模和响应预测带来了可能性[2]。
基于数据的系统分析方法分为参数方法和非参数方法。参数方法通常需要一个假设模型,并进行初始参数化。利用系统响应数据,通过最小二乘和最大似然估计法来减小模型预测误差,实现模型参数的更新[3⁃5]。在处理非线性动力学问题时,通常假设初始模型结构为双线性结构、Duffing 结构或滞回结构[6⁃7]。非参数方法包括小波变换、Hilbert⁃Huang变换、神经网络方法等,不需要关于系统的先验信息。其中,神经网络[8]具有很强的非线性拟合能力,通过数据训练可映射任意复杂的非线性关系,可直接建立输入与输出数据之间的映射关系,是最受关注的复杂系统动力学建模方法。Pei 等[9⁃10]利用神经网络拟合非线性回复力。Derkevorkian等[11]将神经网络与常微分方程(ODE)求解器相结合,模拟土体结构相互作用并预测系统响应。Witters等[12]建立神经网络的客车半主动阻尼器模型,该模型能够准确、有效地描述阻尼器的动态特性。基于机器学习算法的数据驱动建模,大都把状态向量的时间导数数据看作已知。因为导数运算对采集数据中噪声因素非常敏感,若不能准确获得状态向量的导数数据,就会产生较大误差。Raissi等[13]采用线性多步法限制状态向量与其导数之间的关系,减少了获取数据过程产生的误差。
利用神经网络求解常/偏微分运动方程也是近年来研究热点之一。将神经网络的输出作为方程的一个候选解,通过训练来更新网络权重参数从而降低控制方程的不平衡,继而使候选解不断接近真解。例如,Chen 等[14]利用深度神經网络求解常微分方程,采用常规算法验证结果的准确性。Raissi等[15] 利用神经网络对时间离散和时间连续的两类偏微分方程模型进行求解及辨识。Wei 等[16]基于深度强化学习理论对范德波方程及经典偏微分方程求解,结果表明对稳定周期解求解精度高、速度快。但相较于偏微分方程,常微分方程计算问题中所得的神经网络大多只对当前数据集有效,主要原因是损失函数对模型训练过程的约束较弱,导致训练后的神经网络不能很好地逼近理论模型。因此,进行数据驱动的动力学研究,不能仅仅着眼于数据本身,更要关注其代表的物理含义,借用力学特征从数据间挖掘潜在的动力学规律。
研究动力学问题时,很多工程系统都可以简化成单自由度或多自由度弹簧质量系统,同时也考虑阻尼、间隙等因素的影响。考虑到工程系统的复杂性和参数不确定性,基于力学原理常难以建立满足需求的模型,因此本文研究数据驱动的非线性动力学系统建模,并基于数据模型的响应预测结果,验证数据模型的有效性。本文研究非自治动力学系统,其状态方程形式下外激励项与响应项不存在耦合关系。首先给出建模流程,即由已知动力学状态方程获得若干外激励下的响应数据,并作为神经网络的训练数据,用来使神经网络代替状态方程中含有响应项的部分。同时利用训练数据间已知关系构建损失函数,从而提高数据模型精度。然后将该方法应用于单自由度和三自由度弹簧质量系统,通过 ODE 求解器获得训练后的系统幅频响应曲线,讨论训练数据噪声和训练数据特征对数据模型精度的影响。
1 问题描述
考虑一个非自治动力学系统:
式中 u ( t )=[ u1( t ) u2( t )… un ( t )]T ∈ Rn 为位移向量;M 为质量矩阵;G( u( t ),u̇ ( t ))为广义回复力;F ( t )为外激励力。
将方程(1)写成以下状态方程形式:
式中 v ( t )=[ v1( t ) v2( t )…vn ( t )]T ∈ Rn 为速度向量。为简便起见,进一步将方程(2)表示为:
式中 X ( t )=[ uT ( t ) vT ( t )]T ∈ R 2n 为系统的状态向量,f (X ( t ))∈ R 2n,fˉ(t )=[01× n ( M -1 F ( t ))T ]T ∈R 2n。
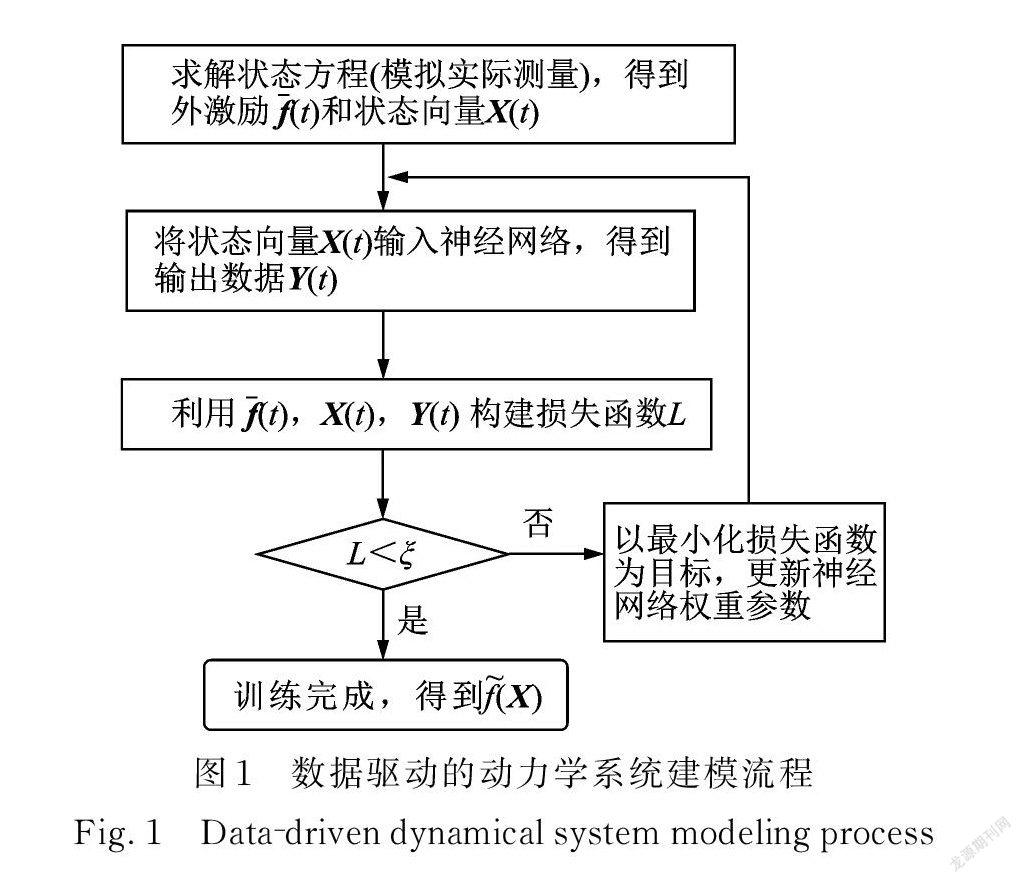
本文研究 G( u,u̇ ) 为未知时的数据建模,因其包含在f( X )中,将利用已知的输入输出数据训练一个神经网络f͂( X )来代替f( X ),从而得到可用于动力学计算的数据模型。基本做法是:求解已知状态方程(模拟实际测量),得到对应于外激励fˉ( t )的状态向量响应数据 X( t ),用于训练神经网络f͂( X ),使其反映从 X 到f( X )的映射关系。将训练后的神经网络代入式(3),便可获得用于响应预测的状态方程:
给定方程外激励fˉ( t )及状态初始值 X( t0),即可利用 ODE 求解器求解、分析动力学系统(4)的响应 X ( t )。
2 求解方法
2.1 线性多步法
用线性多步法求解常微分方程初值问题,是利用已知的前 k 个时刻的状态向量表示下一时刻的状态向量,其优势是既保证计算精度,又不会增加太多计算量[17]。
为求解ti +1时刻的状态向量 X( ti +1),k 步线性多步法计算格式为:
式中i = k -1,…,N -1,αp 与βq 为常数,h 为数据采样时间间隔,N 为数据采样点数。当β-1= 0时,上式是显性线性多步格式;当β-1≠ 0时,上式是隐性线性多步格式。公式(5)给出了 k+1个时刻的状态向量 X 及方向场 Ẋ 之间满足的定量关系。将方程(3)代入式(5),可得:
由于提供了狀态向量与状态方程(3)右端项之间的约束关系,方程(6)将用于神经网络中损失函数的构建。
2.2 数据驱动的动力学系统建模流程
已知若干外激励和相应的系统响应数据,进行系统数据驱动的动力学建模流程如图1所示。
1)获取神经网络训练数据。给定 M 个不同频率和幅值外激励的时间序列数据fl(-)( tj ),l=1,…, M;j=0,1,…,N,利用 ODE 求解器对已知的状态方程直接求解,获得相应的系统状态向量的时间序列Xfl(-)(tj ),用其模拟工程中实际测量数据。
2)训练神经网络f͂( X )。将以上状态向量数据 X (tj )作为神经网络的输入数据,神经网络的输出数
据 Y (tj )应满足 Y (tj )=f͂( X (tj ))。
根据线性多步法,公式(6)给出了神经网络的输入与输出数据应该满足的定量关系,即:
为提高神经网络的模型精度,根据状态向量中位移变量和速度变量的已知关系,构建网络训练的损失函数。损失函数是衡量神经网络输出数据与理论数据之间差距大小的指标,网络训练的本质正是最小化损失函数的过程。定义 X(tj )中前 n 维数据为 X1(tj ),后 n 维数据为 X2(tj );同理,定义输出数据 Y (tj )中前 n 维数据为 Y1(tj ),后 n 维数据为 Y2(tj )。
根据方程(2),(3)可得
根据线性多步法给定的神经网络输入输出数据之间关系(7)及由训练数据间的已知关系确定的部分神经网络映射信息(8),给出了神经网络训练过程的损失函数 L 为:
式中γ为一常数,且:
利用神经网络的输入与输出数据构建损失函数 L 后,以最小化损失函数为目标,用 Adam 方法[18]优化、更新神经网络的权重参数。当损失函数数值下降到所需精度ξ时,认为神经网络已完成训练并停止迭代。
激活函数也是神经网络的重要组成部分之一。考虑到训练数据及其导数的连续性,激活函数选为 tanh 函数。神经网络设定为一个隐藏层,每层256个神经元。综上,通过训练得到状态方程(4)中的神经网络f͂( X )。
3)将神经网络f͂( X )代入状态方程(4),并利用 ODE 求解器求解和预测外激励fˉ( t )变化情况下系统状态向量的响应 X( t )。
为直观表现建立的数据模型在外激励变化情况下的响应预测效果,改变方程(4)中外激励fˉ( t ),利用 ODE 求解器多次求解,得到系统在不同激励力下的状态响应 X( t ),取稳定状态下 X( t )中的位移幅值。通过正向和反向扫频计算,得到幅频响应曲线以检验数据驱动建模能否反映共振幅值跳跃的非线性现象。
3 数值算例
针对单自由度及三自由度非线性振动系统,研究上述数据驱动的系统建模和响应预测能力。为保证工程应用情况下的有效性,着重探究训练数据中噪声和训练数据特征对数据模型精度的影响。
3.1 立方非线性的单自由度弹簧质量系统
考虑带有立方非线性的单自由度弹簧质量系统,如图2所示。
动力学状态方程为:
其中:
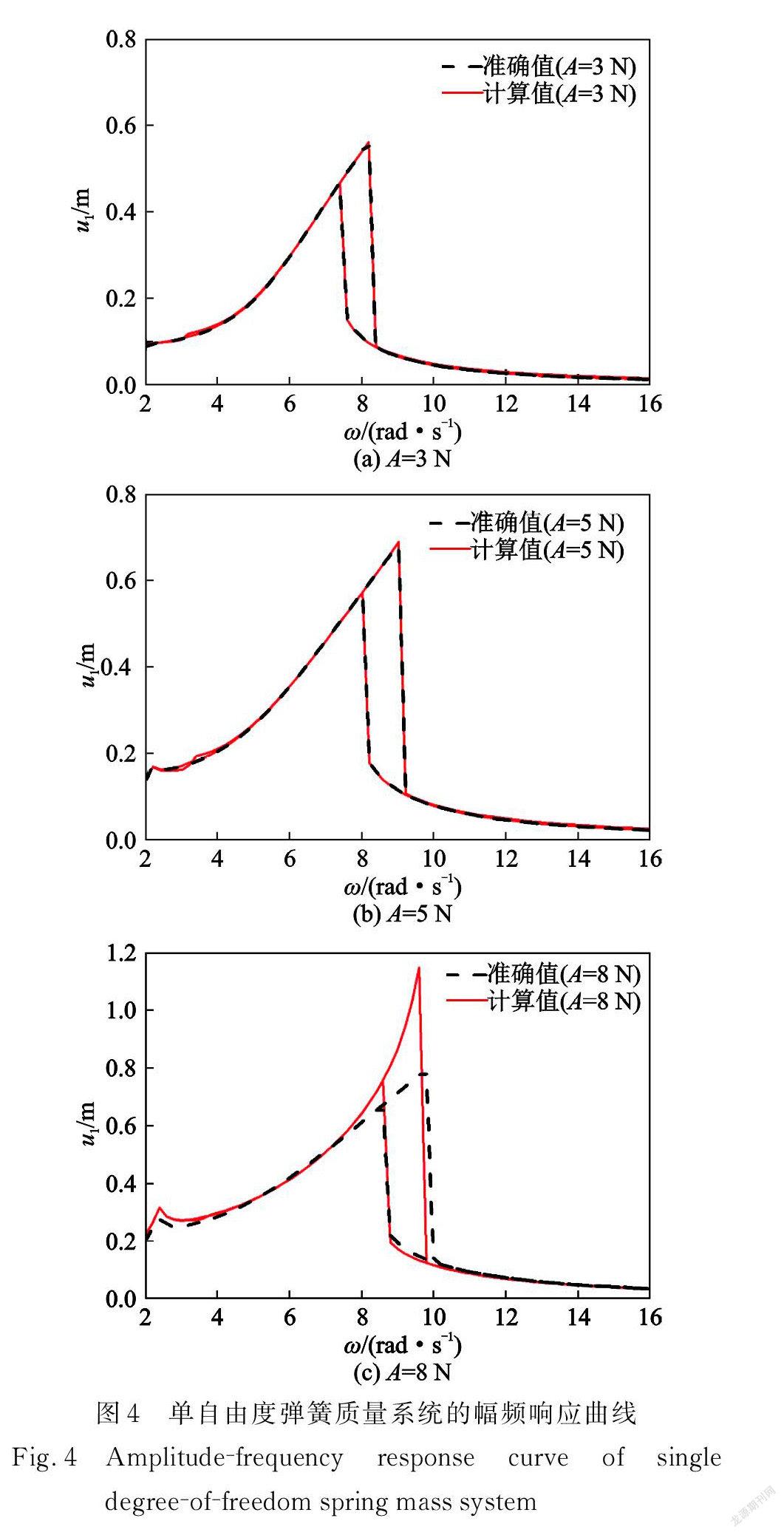
考虑系统维度较低,将线性多步法公式(7)简化为以下隐性单步形式:
对应的损失函数为:
其中:
根据图1的流程,利用已知的外激励及响应数据训练神经网络,代替状态方程中的f( u1,v1)。
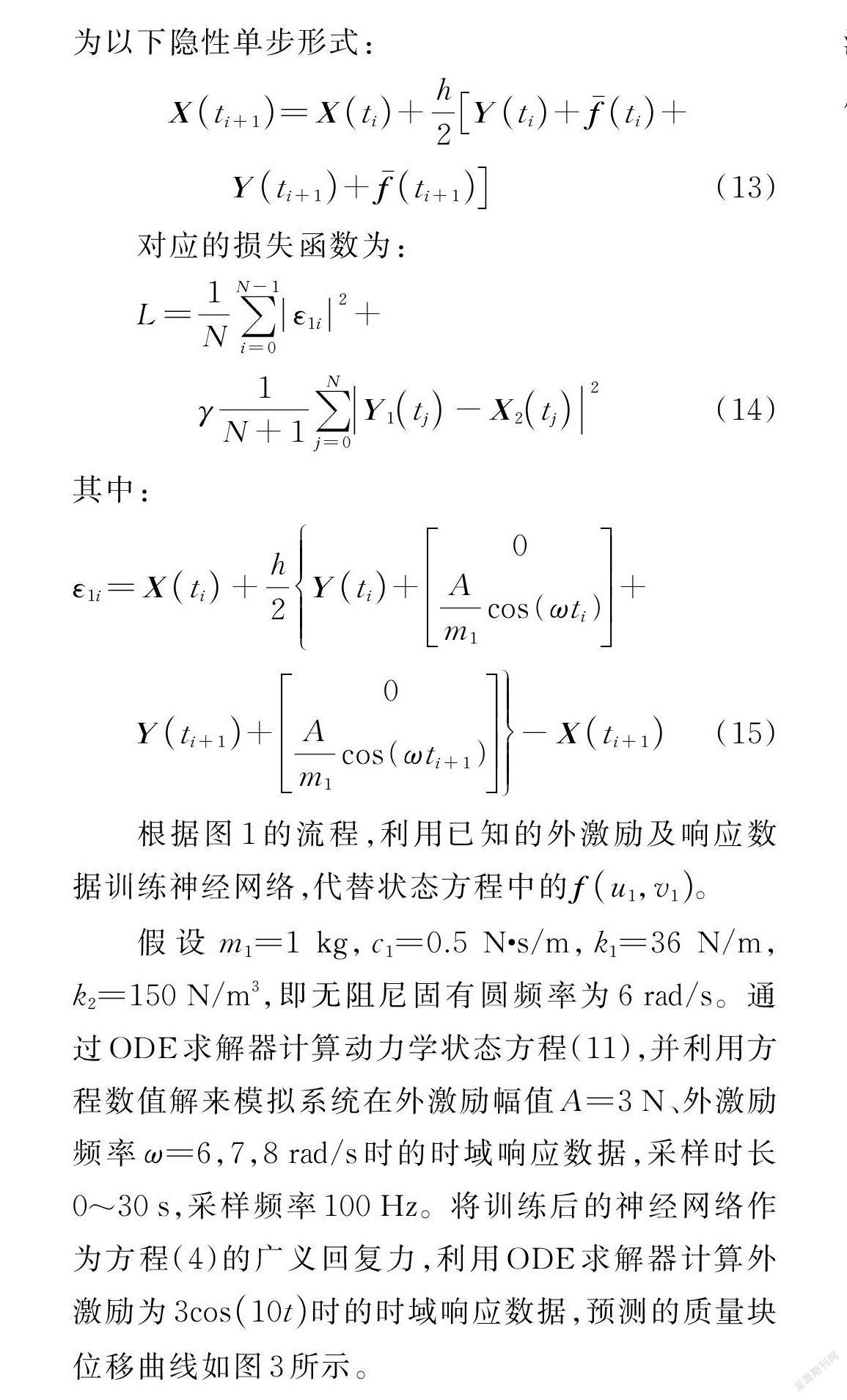
假设 m 1=1 kg,c1=0.5 N·s/m,k1=36 N/m, k2=150 N/m3,即无阻尼固有圆频率为6 rad/s 。通过 ODE 求解器计算动力学状态方程(11),并利用方程数值解来模拟系统在外激励幅值 A=3 N 、外激励频率ω=6,7,8 rad/s 时的时域响应数据,采样时长0~30 s,采样频率100 Hz 。将训练后的神经网络作为方程(4)的广义回复力,利用 ODE 求解器计算外激励为3cos(10t )时的时域响应数据,预测的质量块位移曲线如图3所示。
图3中实线表示求解已知动力学状态方程(11)的数值解,星号是基于数据模型的计算解,两者差距极小。图 4( a )为幅频响应曲线的对比。激励幅值提高到5 N,也能得到较好的预测结果,如图4(b)所示。但当 A=8 N 时,由于预测工况与训练工况的激励幅值相差过大,数据模型的共振区响应预测精度相对变差,如图4( c )所示。
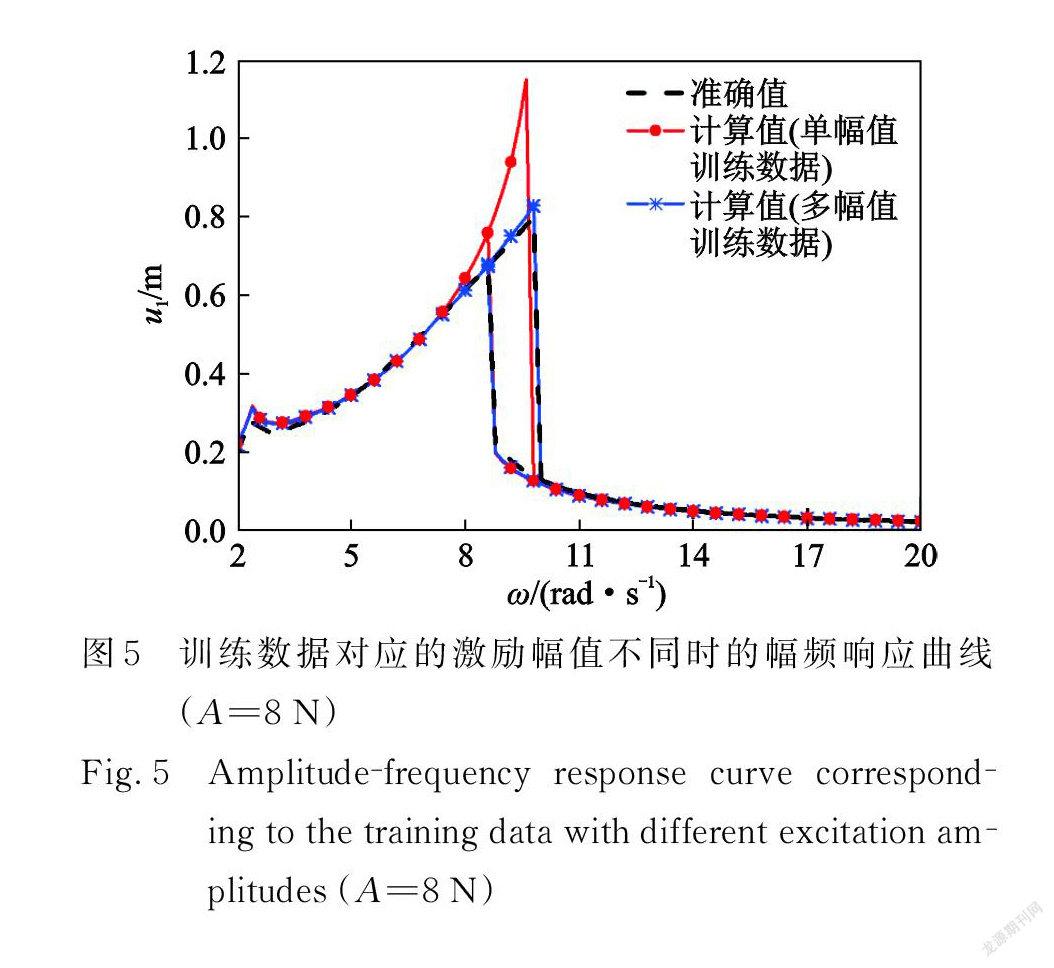
响应预测结果存在误差的本质是:构建的数据模型与理论模型之间存在差异,两者不能完全等效替换。究其原因,一是本文侧重利用神经网络进行系统建模和响应预测的流程,神经网络用了单个隐藏层,网络结构较简单,若采用更为复杂的神经网络结构,有可能提高对理论模型的逼近能力;二是上述算例中选用单一外激励幅值情况下的响应数据作为网络训练数据,训练数据使用不同激励幅值下的响应数据,将减小这类响应预测误差。为验证响应预测能力与训练数据对应外激励幅值的关系,使用外激励频率和幅值均变化时的多幅值响应数据,即采集外激励幅值 A 分别为3,5 N,外激励频率ω分别为7,8 rad/s 时的系统时域响应数据。图 5是训练数据选用单幅值和多幅值两种响应数据时的幅频响应曲线(A=8 N)。结果表明,选用多幅值响应数据进行训练可以有效提高神经网络在激励变化情况时的响应预测能力。
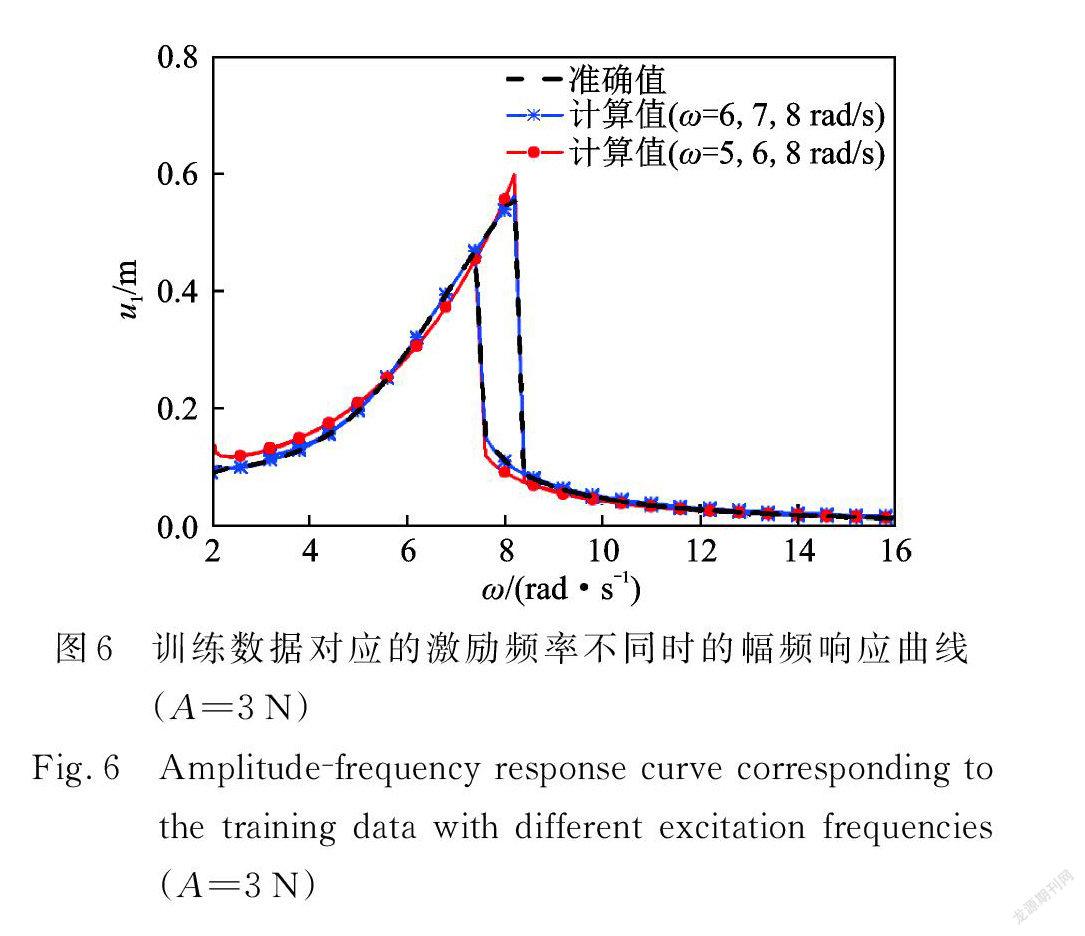
考虑到训练数据是不同外激励情况下的系统响应数据,因此外激励情况将影响训练数据特征,进而影响网络的训练。为探究数据模型精度与训练数据对应的外激励频率的关系,采集外激励幅值 A=3 N 、激励频率ω分别等于6,7,8 rad/s 和5,6,8 rad/ s 的两组系统时域响应数据,采样时长0~30 s,采样频率100 Hz 。图6为训练数据选用不同激励频率下的响应数据时的幅频响应曲线(A=3 N),两组训练数据对应的计算值与准确值均基本吻合,且可有效得到系统幅值跳跃时的激励频率;同时训练数据对应的激励频率越靠近共振频率,数据模型的响应预测结果越好。
采集系统状态响应数据时,数据的采样频率大小是必要的考虑因素。探究采样频率对预测精度的影响,将作为数据获取时采样频率设定的依据。采集外激励幅值 A=3 N,外激励频率ω=6,7,8 rad/s 時的系统时域响应数据,采样频率由100 Hz 变为200 Hz 。图7为由采样频率变化前后的训练数据预测的幅频响应曲线(A=8 N)。结果表明,采样频率满足采样定理后,改变采样频率对激励幅值变化时的响应预测能力并没有明显增强效果。原因是当改变采样频率时,损失函数中数据之间应遵循的动力学规律并没有很大变化。
为探究构建损失函数指标 e2j 对提高响应预测能力的有效性,采集外激励幅值 A=3 N 、外激励频率ω=6,7,8 rad/s 的系统时域响应数据,采样时长0~30 s,采样频率100 Hz 。图8为选取不同损失函数指标时对应的幅频响应曲线(A=3 N),红色曲线为损失函数 L 只包含指标 e1i 时的幅频响应曲线,蓝色曲线为 L 包含指标 e1i 和 e2j 时的幅频响应曲线,前后两者选用相同的网络训练时间。结果表明,在损失函数中补充指标 e2j 能有效地提高数据模型的响应预测能力。
将独立、同分布的高斯噪声加到求解方程(11)得到的原始响应数据中,模拟包含环境噪声的响应数据。噪声平均幅值为零,标准差分别等于原始响应数据标准差的2%和5%。图 9考虑了训练数据中噪声对响应预测的影响(A=3 N),可以看出预测精度较好,说明所建立的数据模型对噪声数据有较好鲁棒性。
3.2 间隙非线性的三自由度弹簧质量系统
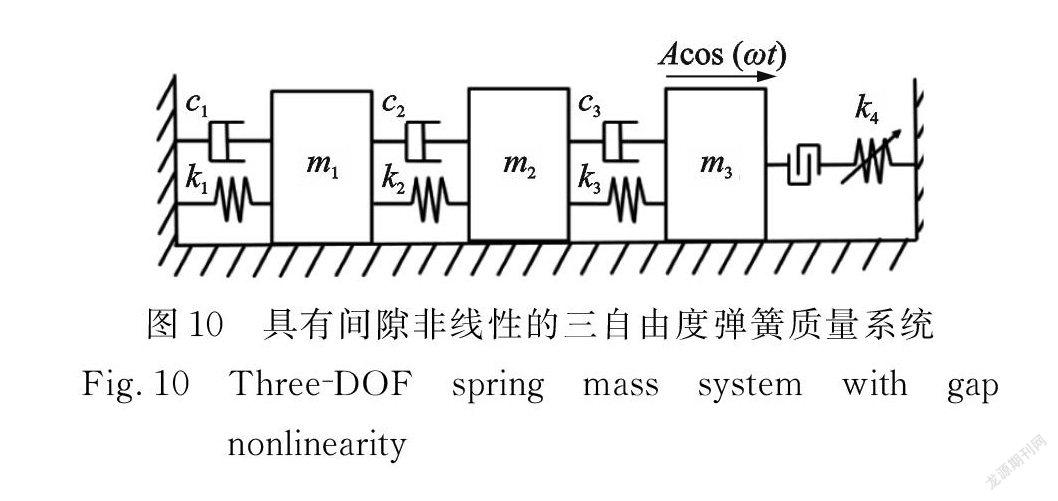
考虑具有间隙非线性的三自由度弹簧质量系统,如图10所示。
图10中,k4为立方非线性弹簧,系统动力学方程表示为:
方程(16)中非线性项为:
式中δ表示间隙,大小为2 mm 。假设 m 1= m2= m3=1 kg,c1= c2= c3=1 N·s/m,k1= k2= k3=600 N/m,k4=6000 N/m3,第一阶无阻尼固有圆频率为10.9 rad/s 。通过求解动力学方程(16)来模拟外激励幅值 A=1 N 、外激励频率ω=10,11,12rad/s 时的系统时域响应数据的采集,采样时长0~30 s,采样频率100 Hz 。图11( a )为基于数据模型预测的最右侧质量块的幅频响应曲线(A=1 N)。增大激励幅值,预测结果仍与准确值基本吻合(图11(b)为 A=1.5 N 时最右侧质量块的幅频响应曲线)。结果表明,针对具有间隙非线性的三自由度弹簧质量系统,建立的数据模型能够有效地计算幅频响应曲线。
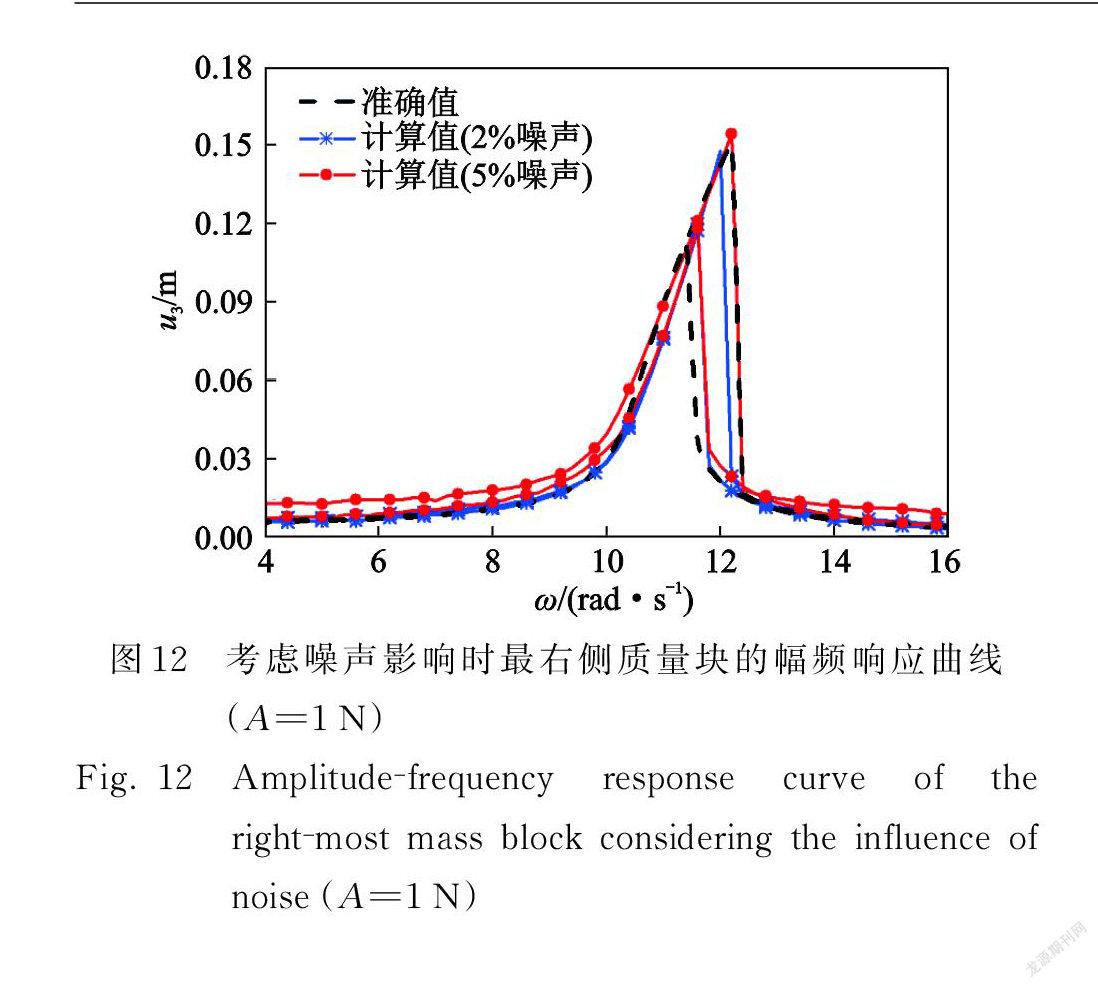
图12为考虑响应数据中包含噪声时的幅频响应曲线(A=1N),可以发现计算值与准确值基本吻合,说明该方法对不同等级噪声影响下的间隙非线性三自由弹簧质量系统同样具有较强的鲁棒性。
4 结论
本文研究数据驱动的非线性多自由度动力学系统建模和响应预测。通过求解已知状态方程模拟系统响应数据,并用于训练神经网络,然后利用 ODE 求解器进行系统响应预测。依据训练数据间已知关系构建损失函数,提高了数据模型精度。针对包含立方非线性及间隙非线性的弹簧质量系统进行数值验证,结果表明:
(1)所提出的方法可根据系统若干外激励与系统响应数据进行外激励幅值和频率变化时的非线性弹簧质量系统响应预测,并进一步获得系统幅频响应,同时对训练数据中的噪声具有鲁棒性。
(2)训练数据特征对数据模型精度存在影响。训练数据对应的外激励频率越靠近系统共振频率,数据模型精度越好;使用外激励幅值不单一的多幅值响应数据进行训练,可以有效提高数据模型在外激励幅值变化时的响应预测精度;改变训练数据的采样频率对数据模型精度影响不大。
参考文献:
[1] 杨强,孟松鹤,仲政,等.力学研究中“大数据”的启示、应用与挑战[ J ].力学进展,2020,50(1):1⁃44.
Yang Q,Meng S H,Zhong Z,et al . Big Data in me⁃ chanical research:potentials,applications and challeng⁃ es [ J ]. Advances in Mechanics,2020,50(1):1⁃44.
[2] 杨卫,赵沛,王宏涛.力学导论[M].北京:科学出版社,2020.
Yang Wei,Zhao Pei,Wang Hongtao . An Overview ofMechanics[M]. Beijing:Science Press,2020.
[3] Lei Y,Wu Y,Li T . Identification of non⁃linearstruc⁃tural parameters under limited input and output measure⁃ ments[ J ]. International Journal of Non⁃LinearMechan ⁃ ics,2012,47(10):1141⁃1146.
[4] Zhou S ,Heylen W ,Sas P ,et al . Parametric modalidentification of time⁃varying structures and the valida⁃ tion approach of modal parameters[ J ]. Mechanical Sys⁃ tems and Signal Processing,2014,47(1⁃2):94⁃119.
[5] 杨智春,丁允停,王乐.用 Padé多项式拟合法辨识动力学系统的物理参数[ J ].振动工程学报,2016,29(1):24⁃30.
Yang Zhichun, Ding Yunting, Wang Le . Identifying physical parameters of structural dynamical system us⁃ ingPadé approximation[ J ]. Journal of Vibration Engi⁃ neering,2016,29(1):24⁃30.
[6] Lai Z,Nagarajaiah S . Sparse structural system identifi⁃cation method for nonlinear dynamic systems with hys⁃ teresis/inelastic behavior [ J ]. Mechanical Systems and Signal Processing,2019,117:813?842.
[7] 孙伟,李星占,韩清凯.螺栓联接梁结构结合部非线性特性参数辨识[ J ].振动工程学报,2013,26(2):185⁃191.
Sun Wei ,Li Xingzhan,Han Qingkai . Nonlinear joint parameter identification for bolted beam structure [ J ]. Journal of Vibration Engineering , 2013, 26(2) :185⁃191.
[8] Worden K ,Staszewski W J , Hensman J J . Naturalcomputing for mechanical systems research :a tutorial overview[ J ]. Mechanical Systems and Signal Process⁃ ing,2011,25(1):4⁃111.
[9] Pei J,Smyth A W . New approach to designing multilay⁃er feedforward neural network architecture for modeling nonlinear restoring forces . Ⅰ:formulation[ J ]. Journal of Engineering Mechanics,2006,132(12):1290⁃1300.
[10] Pei J,Smyth A W . New approach to designing multilay⁃er feedforward neural network architecture for modeling nonlinear restoring forces .Ⅱ:applications[ J ]. Journal of Engineering Mechanics,2006,132(12):1301⁃1312.
[11] Derkevorkian A ,Hernandez Garcia M ,Yun H B ,etal . Nonlinear data ⁃ driven computational models for re⁃ sponse prediction and change detection [ J ]. Structure Control Health Monitoring,2015,22(2):273⁃288.
[12] Witters M ,Swevers J . Black⁃box model identificationfor a continuously variable ,electro⁃hydraulicsemi⁃active damper[ J ]. Mechanical Systems and Signal Processing,2010,24(1):4⁃18.
[13] Raissi M ,Perdikaris P ,Karniadakis G E . Multistepneural networks for data⁃driven discovery of nonlinear dynamical systems[ J ].2018,arXiv:1801.01236.
[14] Chen T Q,Rubanova Y,Bettencourt J,et al . Neuralordinary differential equations [ J ]. 2018,arXiv:1806.07366.
[15] Raissi M ,Perdikaris P ,Karniadakis G E .Physics⁃informed neural networks:a deep learning framework for solving forward and inverse problems in⁃ volving nonlinear partial differential equations[ J ]. Jour⁃ nal of Computational Physics,2019,378:686⁃707.
[16] Wei S,Jin X,Li H . General solutions for nonlinear dif⁃ferential equations :a rule⁃basedself⁃learning approach using deep reinforcement learning [ J ]. ComputationalMechanics,2019,64(5):1361⁃1374.
[17]王高雄,周之铭,朱思铭,等.常微分方程[M].3版.北京:高等教育出版社,2008.
Wang Gaoxiong,Zhou Zhiming,Zhu Siming,et al . Or⁃ dinary Differential Equations [M]. 3rd ed . Beijing: Higher Education Press,2008.
[18] Kingma D P,Ba J . Adam:a method for stochastic opti?mization[ J ].2014,arXiv:1412.6980.
Data ⁃driven modeling and response prediction of nonlinear multi⁃degree⁃of⁃freedom systems
CAI Jun‑tong1,2,YIN Qiang1,2,DING Qian1,2
(1.Department of Mechanics,School of Mechanical Engineeing,Tianjin University,Tianjin 300350,China;
2.Tianjin Key Laboratory of Nonlinear Dynamics and Control,Tianjin 300350,China)
Abstract: Due to the complexity of the engineering system and the uncertainty of the parameters,the dynamic control equations es⁃ tablished by the principles of mechanics are often difficult to meet the requirements of precision . This paper studies data-driven sys⁃ tem modeling and response prediction . First,the numerical solution of the dynamic state equation is used to simulate the system re⁃ sponse under different external excitations measured in the experiment,and the neural network model is trained with the response data . The loss function containing the known relationship between the training data is constructed to improve the accuracy of the neural network,and the data model expressing state relationship is obtained . Then,the neural network model is incorporated into the ordinary differential equation solver to predict the response of the system under different excitations and obtain the amplitude - frequency response relationship . The modeling method is applied to the spring mass system with cubic and gap nonlinearity respec⁃ tively . The calculation results show that an accurate data model can be established based on the response data and the hysteresis and jump responses of the nonlinear system at the main resonance can be obtained . The study also shows that the more the training data has and the more complete the data is,the better the accuracy of the data model and the smaller the error of the predicted re⁃ sponse will be .
Key words : nonlinear system;data⁃driven;system modeling;response prediction
作者简介:蔡君同(1996—),男,硕士研究生。电话:17702299785;E ⁃mail:cccjuntong@126.com。
通讯作者:丁千(1963—),男,教授。电话:13502119753;E ⁃mail:qding@tju .edu .cn。
猜你喜欢
中国高新技术企业(2017年1期)2017-03-24
软件导刊(2017年1期)2017-03-06
中国广播(2017年1期)2017-02-21
价值工程(2016年35期)2017-01-23
软件(2016年4期)2017-01-20
科技创新与应用(2016年34期)2016-12-23
青春岁月(2016年20期)2016-12-21
科技视界(2016年26期)2016-12-17
科技视界(2016年1期)2016-03-30
中国信息技术教育(2015年17期)2015-09-15
