基于渐进阈值分割的多云背景目标检测研究
2022-11-11 11:02赵业翀
电子技术与软件工程 2022年15期
赵业翀
(江苏大学 江苏省镇江市 212003)
多云背景条件会对目标检测的精准度产生较大的影响,从目标检测方法应用到各个行业和领域来看,多云背景条件一般出现在对海上飞机目标检测的过程中。检测算法是目标检测工作开展的主要依据,当前能够应用于目标检测的算法类型,以图像阈值分割算法为主。对基于渐进阈值分割的多元背景目标检测进行分析,能够为提高目标检测的实际效果提供一定的技术优化思路。
1 图像阈值分割算法
1.1 图像阈值分割算法的具体含义
图像阈值分割算法是现阶段应用的最为广泛的一种图像分割方法,能够有效满足目标和背景占据不同灰度级范围图像的分割要求[1]。图像阈值化主要是指依据图像中的目标提取物与背景在灰度特性上的差异,将图像整体划分为两个具有不同灰度级的区域组合,并从中选取一个合适的阈值作为划分图像像素点的主要依据,在对图像的各个像素点进行目标和背景区域的划分之后,就可以得到一个二值图像。在此过程中,阈值变换曲线如图1所示。由阈值分割算法得到的图像,能够以压缩数据的方式,减少图像在实际分割中所占用的储存空间,简化图像后续的分析和处理步骤,在保证图像分割效果的同时,也能够有效提高算法运行和处理的效率。
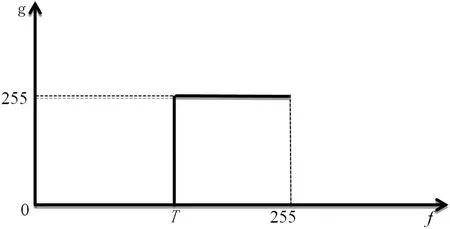
图1:阈值变换曲线
尽管图像阈值分割算法一般包括单阈值分割和多阈值分割两种主要的类型,但两种图像分割的算法在应用原理上是相对一致的。在图像阈值分割算法中确定阈值,主要可以呈现出以下形式:
T=T[x,y,p(x,y),q(x,y)]
在该式中,T代表选择的阈值划分标准,p(x,y)代表像素点在这一坐标位置的灰度值,而q(x,y)代表这一坐标点邻域的局部特性。当p(x,y)>T时,坐标点(x,y)就是物体点,当p(x,y)<T时,坐标点(x,y)就是背景点。考虑到T在阈值中的取值不同,可以将图像分割算法中的阈值标准分为三种类型,即T=T[p(x,y)]的全局阈值,T=T[p(x,y),q(x,y)]的局部阈值,T=T[x,y,p(x,y),q(x,y)]的动态阈值[2]。全局阈值一般被应用到图像灰度分布较集中的情况中,但由于现实中的图像分割处理情况大多较为复杂,因而在实际应用图像阈值分割算法时,通常采用局部阈值和动态阈值两种情况。
1.2 阈值选取方法
双峰法主要是指在假设图像主要由前景和背景两部分组成的前提下,图像分割后的灰度直方图中图像的前景和背景都会形成高峰,而两个高峰之间的最低谷就是图像本身的阈值。
迭代法主要是指在分割图像并求出图像的最大灰度值和最小灰度值之后,依据这两个数值来确定初始阈值。再选取一个合适的阈值,将图像分割为前景和背景之后,将阈值标准带入到初始阈值的计算公式当中,从而获得图像前景和背景两者的平均灰度值以及在这种情况下的新阈值[3]。当选取的阈值标准与新阈值相等时,可以得出图像的阈值,如果没有达到这一标准,就需要重新选择阈值来重复以上步骤,直到得出图像阈值结果为止。
大津法主要是指在对需要分割的图像划定一个灰度级范围之后,在这一灰度级范围内选取相应的灰度级像素个数,在对每个灰度级存在的概率进行分析之后,得到的灰度级像素就是图像的阈值。
灰度拉伸法主要是在大津法的基础上,以增加图像灰度级数的方式,增加图像前景和背景的灰度差,从而让分割后的图像更为清晰的一种取值方法[4]。在实际应用灰度拉伸法时,需要依据不同的图像类型来使用不同的拉伸系数,以此来保证图像阈值分割算法的应用效果。
Kirsch算法主要是针对数字图像中每个像素具有的8个邻点灰度值提出的,以像素的8个邻点灰度值为依据,让其中三个相邻点的加权和减去剩下5个零点的加权,从而得到一个差值[5]。依据这一差值大小,可以让像素的三个邻点绕着像素点自身不断移动,阈值就是这个过程中8个差值的最大值,可以用Kirsch算子来表示。
从图像阈值分割算法的实际应用情况来看,迭代法以及灰度拉伸法的阈值取值方法应用效果更为明显[7]。
2 多云背景下的目标检测现状
多云背景,如图2,是一种会阻碍目标检测准确性的主要因素,多云背景条件一般会对飞机航行过程中的目标检测产生影响。而从空中飞机目标检测的实际情况来看,飞机在海上飞行中很容易受到多云背景的影响导致目标检测获得的图像清晰度较低。飞机的目标检测技术一般存在于舰载光电系统当中。在现代科学技术不断提高的背景下,光电成像系统,如图3,的运行效果得到不断改善,已经能够被应用到全天候的工作当中,具有较强的抗干扰能力和良好的隐蔽性。光电以下系统能够被应用到侦查监视以及探测等多种工作要求当中。其中,飞机上应用的舰载光电系统,能够有效满足光电对抗、海上精确测量等方面的工作要求。但从舰载光电系统的实际运行情况来看,在远距离的情况下,由于光电系统中的探测器接收到的目标信号较弱,在目标检测中获得的图像像素也并不大,这样就会因为信噪比低、对比度差等原因影响到目标检测图像的清晰度。

图2:多云背景

图3:光成像系统图
3 基于渐进阈值分割的多云背景目标检测分析
3.1 多云背景目标特性
要想应用渐进阈值分割来提升目标检测效果,首先需要对多云背景下的目标特性进行分析。从以往目标检测中呈现的图像类型和情况来看,目标图像一般由背景、噪声和目标三部分组成,将目标图像的主要结构用公式来表示如下:
f(x,y)=B(x,y)+N(x,y)+T(x,y)
在该式中,(x,y)代表图像像素点的坐标,f(x,y)为图像整体的灰度值,B(x,y)为背景的灰度值,N(x,y)为噪声的灰度值,T(x,y)为目标的灰度值。
3.2 渐进阈值分割算法的应用原理
渐进阈值分割是在图像阈值分割算法应用远离的基础上,将检测算法所依赖的阈值以渐进迭代的方式进行取值,在建立初步的分割图像集之后,在集合二值图像的过程中,以链码描述算法来实现目标描述和区域填充的要求,以此来提取并计算更完整的目标特征。在对提取的目标特征信息进行验证之后,应用信息逐层筛选的策略来确认多云背景下的目标区域范围,并从中保存与目标检测相关的有效信息。依据得到的有效信息,将目标区域的图像进行累加,依据累加后的图像和设定的概率阈值来对真实的目标进行判断和取舍,从而保证在多云背景下目标检测的准确性和稳定性。一般来说,经过阈值化处理后的图像,可以定义为,其中,图像为g(x,y),0为背景、1为对象。
3.3 目标检测过程
如图4所示。

图4:以渐进阈值算法为依据的多云背景目标检测流程
3.3.1 云层图像预处理
由于多云背景下的云层变化方式和规律特点并不固定,对云层图像的预处理,主要是以背景抑制为主的。在图像背景抑制过程中,需要以提高图像整体的信噪比为主要目标,保证图像处理后的效果能够有效满足目标检测的要求。对于处在不同云层领域背景的目标,选择合适的背景抑制算法来减少图像中存在的噪声和背景杂波,同时,也需要应用图像增强和滤波算法来有效提升云层图像的信噪比,从而为后续云层图像的目标特征提取提供便利。
以高通滤波算法为例,考虑到多云背景图像的像素本身具有较强的关联性,在应用传感器获取到云层图像信息之后,可以应用高通滤波的方法,从多云背景灰度的相关性角度来满足背景抑制的相关要求。具体而言,高通滤波算法主要应用以下表达式进行计算:

在该式中,f(x,y)为获得的云层原始图像,s(x,y)为应用高通滤波算法背景抑制后的图像,而m(i,j)为高通滤波算法的应用模板(图5)。一般情况下,高通滤波算法中应用的模板尺寸为(2a+1)×(2b+1)。

图5:高通滤波算法应用的模板
3.3.2 基于渐进阈值的图像分割
考虑到多云背景条件本身的复杂性,依据图像阈值渐进算法的基本原理,选择渐进迭代的方法来确定阈值大小。
在依据渐进迭代方法计算图像阈值时,需要以分割阈值的范围越小、分割次数越少为主要原则,以μ代表云层图像阈值均值,以σ代表图像方差。在多云背景下,云层图像的方差也比较大,图像阈值的分割范围一般为[μ-σ,μ+σ]。而在天空无云的情况下,由于云层图像的方差也比较小,图像阈值的分割范围可以扩大到[μ-3σ,μ+3σ]。在确定好图像阈值的分割范围之后,就可以结合云层图像的灰度分布情况来选择10-20个渐进的灰度阈值,以此来满足合成二值图像的要求。
3.3.3 链码描述算法在渐进阈值分割中的应用
链码描述算法主要是指以链码的形式来对目标对象的特征进行描述,并依据描述的信息来对填充相应的目标区域。在实际的工作中,链码描述算法主要依据一个确定的像素点,对像素点周围的8个邻点像素的方向以逆时针的形式进行编码。在按照渐进阈值算法来对云层图像进行初步分割之后,链码描述算法需要依据分割后的图像来对目标特征进行计算。
在应用链码描述算法对目标特征进行计算时,需要从记录起始点坐标开始,依据事先确定好的编码,沿着目标边界对后续像素点的方向码进行记录。其中,链码计算过程如下,

在这个过程中,算法计算选取的目标特征属性主要包括目标的运动特征、目标强度、潜在目标大小、目标与背景之间的对比度、目标区域的像素相关性六个内容。在依据链码描述算法获得目标特征的属性参数信息之后,可以直接计算出检测目标对象的周长、目标面积、外接矩形以及边界梯度强度等具体的特征描述情况。
3.3.4 确认目标
在对目标特征信息进行筛选的过程中,依据渐进阈值分割算法的相关原理和要求,需要在结合算法系统对目标的先验知识分析后,依据目标的周长与面积、占空比等指标来对目标进行筛选。在得到初步的筛选信息后,还需要依据图像成像约束的原理,以目标本身的宽高比例约束来对目标进行再次筛选。在经过两次筛选之后,需要考虑到人造目标与云层之间有显著边界的特点,以目标边界像素的梯度强度作为确认和提取目标的主要依据,正确区分人造目标与自然目标。
3.3.5 目标判别
考虑到真实目标很容易在这个多次筛选的过程中反复出现,在对目标进行判别的过程中,在应用渐进阈值分割算法的前提下,可以凭借阈值概率来作为判别真实图像的主要依据。也就是说,在对云层图像进行多次阈值分割的过程中,真实目标出现的概率要普遍比伪目标出现的概率大,可以依据这一特点,在累加二值图像的过程中,依据阈值概率来确定需要检测的真实目标。而在得到最终累加的二值图像之后,还需要依据得到的阈值概率,对阈值图像进行再次分割和筛选,从而有效确定需要检测的真实目标。
3.4 检测结果分析
结合多云背景下目标检测的常用主体来看,在对渐进阈值分割算法的有效性进行实验分析时,可以选用飞机舰载光电系统运行中采集到的可见光图像。本次实验中选取的多云背景条件下的可见光图像相关参数如下:可见光图像分辨率为1920×1080,图像帧频为100Hz。在图像处理板平台上进行有关渐进阈值分割算法的目标检测分析。
在实验检测的过程中,原始图像的灰度均值为160,方差为61,依据渐进阈值分割算法的相关原理,确定原始图像的阈值取值范围在99-221的灰度值之间。将渐进阈值图像分割的标准定为每隔20个灰度级进行一次图像分割,在图像分割完成后累加形成二值图像。依据实验结果可以发现,在阈值取159、179时,飞机目标出现。而在对阈值分割的结果进行分析之后可以发现,159、179的阈值取值在经过多次筛选之后仍然能够完全保留,各种伪目标基本都能够被滤除。如图6所示。

图6:阈值159、179(右上)、199(左下)、219取值下的云层图像呈现效果
而在对这一实验的整个过程进行总结和分析之后,发现在可见光图像的图像帧频为100Hz的情况下,对云层单帧图像进行处理的时间最大可以达到8s,没有超出对于单帧图像处理的10s要求。
4 结论
综上所述,渐进阈值分割算法的应用,能够在一定程度上满足多云背景下目标检测算法的应用要求。目标检测在现代社会的多个行业和领域中都有着广泛的应用,从图像阈值分割算法的角度来对现有的目标检测方法和技术进行优化,不仅能够有效提升目标检测的实际效果,同时也能够让目标检测被应用到实时跟踪以及光电探测等领域当中,有效满足包括飞机在内的各种技术领域的现代化发展要求。
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
高技术通讯(2021年3期)2021-06-09
作文周刊·小学一年级版(2020年20期)2020-09-02
民族音乐(2018年1期)2018-04-18
自动化学报(2017年5期)2017-05-14
小学生作文·小学低年级适用(2016年4期)2017-01-16
光学精密工程(2016年1期)2016-11-07
物理教学探讨·初中学生版(2009年1期)2009-06-25