基于改进多虚拟信号注入的永磁同步电机MTPA控制
2022-11-10 04:39邱建琪史涔溦
微电机 2022年10期
邱建琪,宋 攀,史涔溦
(浙江大学 电气工程学院,杭州 310027)
0 引 言
永磁同步电机由于其具有体积小、重量轻、功率密度高、效率高等优势被广泛应用于各种领域。根据永磁体在转子中的放置方法的不同,永磁同步电机又可分为表贴式永磁同步电机和内置式永磁同步电机。内置式永磁同步电机转子磁路不对称,能够产生磁阻转矩,充分利用磁阻转矩对于提高永磁同步电机的过载能力和功率密度有利。为了充分利用磁阻转矩,内置式永磁同步电机一般采用MTPA控制[1-3]。
最基本的MTPA控制策略包含直接公式计算法和查表法。直接公式计算法根据PMSM数学模型可以推导得到MTPA电流角的计算公式,但由于电机参数会在电机运行中发生变化,故公式计算得到的MTPA电流角存在误差。查表法是事先通过大量测试得到一个电机不同运行状态下电机参数和MTPA电流角的表格,优点是可以避免参数变化带来的实验误差,缺点是前期测试需要花费大量时间,并且得到表格不能在不同电机上迁移使用[4]。
为了避免电机参数变化带来的误差,一些研究者将直接公式计算法和模型参考自适应、扩展卡尔曼滤波、最小二乘法等参数辨识方法结合了起来,提高了MTPA控制精度,但同时也增加了计算量[5]。文献[6]通过注入谐波电流,根据测量的电机谐波转速计算得到电机磁链与d-q轴电感差的比值,代入公式计算,提高了公式法的控制精度。文献[7]引入前馈解耦补偿环节,通过公式推导得到电机参数误差量,代入计算,得到准确MTPA工作点。
近年来,一些研究者提出高频信号注入MTPA控制,通过向永磁同步电机电流角注入一个正弦小信号,检测电机输入功率等信号波动并进行公式推导来获得电磁转矩对电流角偏导数,积分得到MTPA电流角[8-9]。
为了避免注入高频信号带来的转矩脉动,额外损耗等问题。文献[10]提出一种虚拟信号注入策略,虚拟信号注入仅用于计算得到MTPA工作点,并不实际注入到电路中。文献[11]提出一种多虚拟信号注入策略,通过注入多路虚拟高频信号,避免了原虚拟信号注入策略滤波器的使用,提高了系统的动态响应性能。
本文对虚拟信号注入策略和多虚拟信号注入策略进行研究,提出一种新的多虚拟信号注入策略,相比于原虚拟信号注入策略,将虚拟信号的四路注入减少到两路,极大减少了计算量,具有一定的实用意义。
1 PMSM数学模型及MTPA控制
为了便于分析研究永磁同步电机,我们忽略电机铁芯饱和、涡流和磁滞损耗等因素影响[12]。可以建立永磁同步电机d-q坐标系数学模型:
(1)
式中,ud、uq分别为电机d-q轴电压,id、iq分别为电机d-q轴电流,Rs为电机定子电阻,ωe为电机电角速度,Ld、Lq分别为电机直轴电感和交轴电感,ψf为电机定子磁链。
电磁转矩方程为
(2)
式中,Te为电机电磁转矩,p为电机极对数,is为电机定子电流矢量,β为电机电流角,即is与d轴之间夹角。
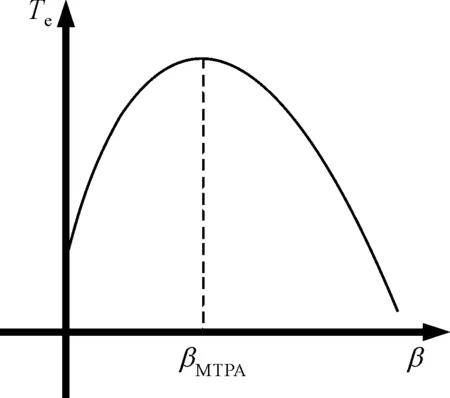
图1 定子电流一定时,电磁转矩与电流角关系
如图2所示,电机恒转矩曲线与电流圆相切的点即为MTPA工作点,这些工作点组合起来即是MTPA曲线。只有在MTPA工作点处才满足∂Te/∂β=0,当β<βMTPA时,∂Te/∂β>0,当β>βMTPA时,∂Te/∂β<0。
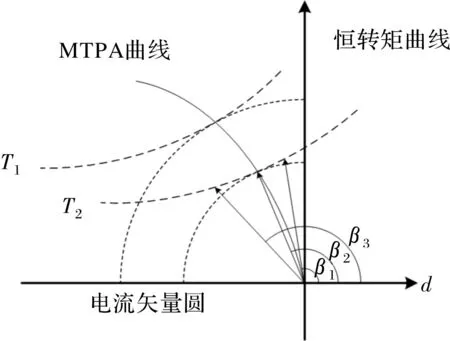
图2 MTPA曲线
2 多虚拟信号注入MTPA控制
2.1 传统多虚拟信号注入MTPA控制
根据式(1)中电机d-q坐标系数学模型,我们可以得到:
(3)
将式(3)代入到电磁转矩式(2)可以得到:
(4)
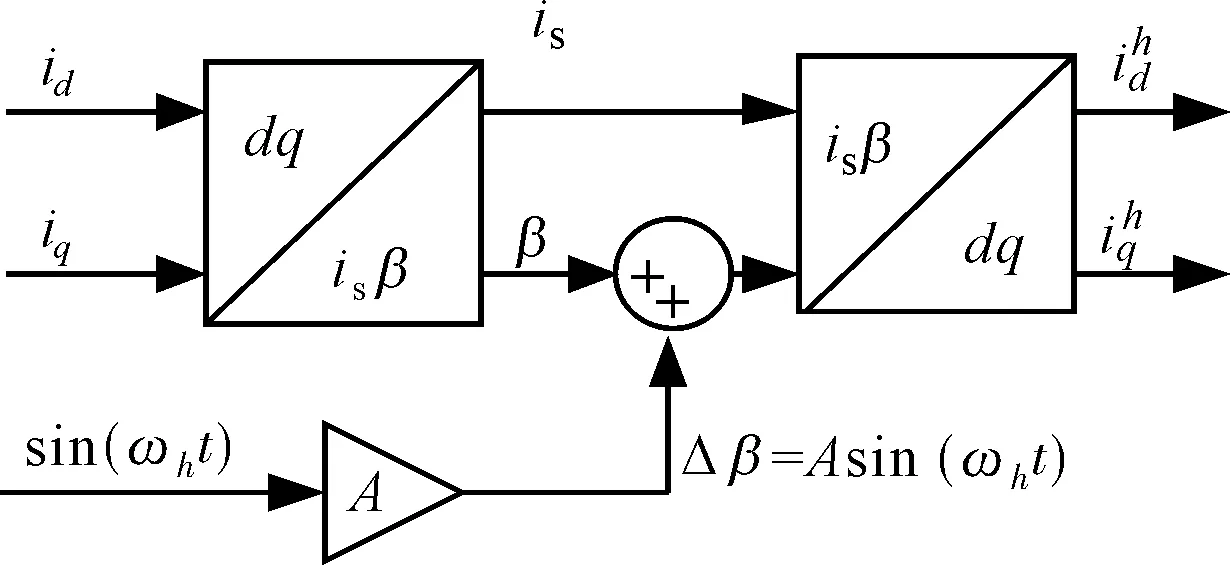
图3 虚拟信号注入
(5)
代入式可以得到注入之后的电磁转矩:
(6)

(7)

图4 传统多虚拟信号注入MTPA控制框图

(8)
(9)
2.2 本文提出的多虚拟信号注入MTPA控制
相对于原多路虚拟信号注入MTPA控制,本文提出了一种新的多路虚拟信号注入方法,将原四路注入减少到两路注入,极大地减少了原方法的计算量,注入方法如式(10)、式(11)所示。
(10)
(11)

图5 本文提出的多虚拟信号注入MTPA控制框图

(12)

(13)

(14)

(15)
3 仿真验证
为了验证本文所提多虚拟信号注入MTPA控制策略的有效性,在Simulink中建立模型进行仿真分析,仿真用永磁同步电机参数如表1所示。

表1 永磁同步电机参数
为对比本文所提出的多虚拟信号注入MTPA控制策略与传统多虚拟信号注入MTPA控制策略的控制精度。仿真先采用传统多虚拟信号注入控制策略,4 s时将控制策略改变为本文提出的多虚拟信号注入控制策略,改变控制策略的同时也改变电流角的初值,以验证本文所提多虚拟信号注入策略能否得到正确的MTPA电流角,仿真结果如图6所示。可以看出本文所提出的多虚拟信号注入策略可以通过计算迅速获得MTPA电流角,与传统多虚拟信号注入策略得到的MTPA电流角对比,在极大减少计算量的情形下,控制精度并没有受到影响。
为验证本文所提方法的动态响应性能,仿真在4 s时突然变载,结果如图7所示。可以看出,面对负载转矩突变,转速、d-q轴电流、电流角等状态量可以迅速恢复稳定。

图6 本文提出的多虚拟信号注入策略与传统多虚拟信号注入策略对比仿真结果

图7 突加负载仿真结果
4 实验验证
搭建实验平台如图8所示,其中标号1为控制板,控制芯片采用STM32F407IG,标号2为电流传感器电路、编码器信号采集、处理电路及逆变器驱动电路板,标号3为直流稳压电源,电压采用100 V,标号4为实验用永磁同步电机,实验电机参数与仿真参数一致,标号5为负载电机,提供负载转矩。
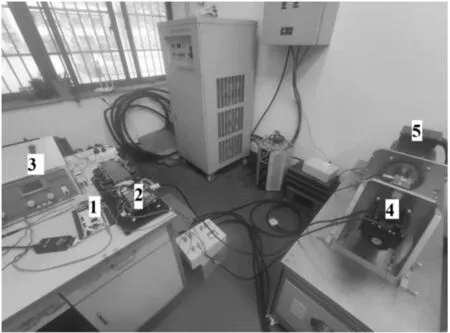
图8 实验平台
图9为电机在负载为7 Nm下,采用方法Iid=0控制、方法II直接公式法控制、方法III传统多虚拟信号注入、方法IV本文提出多虚拟信号注入等四种不同控制策略下电机转速、id、iq、电流角等物理量。为了使两种多虚拟信号注入策略切换的实验效果更加明显,控制策略由方法III向方法IV切换时,将电流角初值设为pi/2,以验证本文所提多虚拟信号注入MTPA控制策略的有效性。
表2为电机在负载为7 Nm下,这四种不同控制方法电机各物理量数值。可以看出,相比于直接公式计算法,多虚拟信号注入MTPA控制效果要更优异。同时,相比传统多虚拟信号注入策略,本文提出多虚拟信号注入策略在大幅减少计算量的情形下,MTPA精度不受影响。

图9 不同控制方法电机各物理量
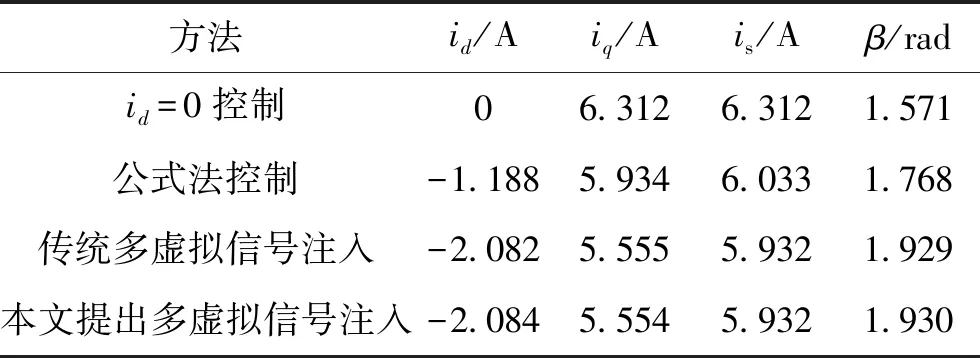
表2 不同控制方法电机各物理量数值
图10是多虚拟信号注入下电机突然加减载实验结果,可以看出,本文提出的多虚拟信号注入控制策略下,运行状态改变之后,电机能够很快达到新的稳定点,找到新的MTPA电流角,控制策略的动态性能良好。

表3 两种控制策略计算量对比

图10 负载突变情形下实验结果
为具体对比本文所提多虚拟信号注入与传统多虚拟信号注入得到MTPA工作点电流角的计算量大小。本文使用STM32F407IG控制芯片进行测试,为更加准确直观呈现实验测试结果,同样运行两段程序1000次,记录下程序运行时间,结果如表3所示。可以看出,相比传统多虚拟信号注入MTPA控制,本文所提出的多虚拟信号注入策略将四路注入减少为两路注入,极大减少了运算量,具有较大的实用价值。
5 结 论
本文对传统多虚拟信号注入MTPA控制方法进行了分析,提出了新的多虚拟信号注入MTPA策略。相比原多虚拟信号注入策略,信号注入由四路减少到两路,极大地减小了运算量。仿真和实验结果验证了新的多虚拟信号注入MTPA控制策略的动静态性能,同时证明了该策略可以在不影响MTPA控制精度的情形下显著减少计算量,具有更好的实用价值。
猜你喜欢
防爆电机(2022年4期)2022-08-17
防爆电机(2022年3期)2022-06-17
防爆电机(2022年3期)2022-06-17
防爆电机(2022年3期)2022-06-17
防爆电机(2022年2期)2022-04-26
昆明医科大学学报(2021年12期)2021-12-30
防爆电机(2021年5期)2021-11-04
防爆电机(2021年5期)2021-11-04
防爆电机(2021年3期)2021-07-21
防爆电机(2021年2期)2021-06-09