基于信息年龄的多目标无人机路径规划策略
2022-11-10 05:02姜军华刘晓艳宋绍仟
长春工业大学学报 2022年2期
姜军华, 刘晓艳, 宋绍仟
(1.枣庄有线广播电视传输中心, 山东 枣庄 277102;2.吉林大学 通信工程学院, 吉林 长春 130025)
0 引 言
随着科技进步和智能化发展,无人系统的研究日益成为热点,受到学术界和工业界的广泛关注。以UAV为代表的智能无人设备在军事、民用等领域都发挥着重要作用[1]。UAV是一种利用无线电遥控设备,或者计算机自主操作的不载人飞机,由于UAV具有低成本、高操作性、高移动性、覆盖范围广等特点[2],在民用、农业和军事领域得到广泛应用,如数据采集、环境监测[3]、精准农业、救援场景以及战争环境等。利用UAV去完成这些任务,不仅对环境要求低,并且UAV移动性高、可操作性强,可以大大提高任务完成效率,同时UAV的成本低,并不需要耗费大量资源。
在UAV辅助的数据收集网络中,UAV主要负责执行数据的信息感知,并且在任务执行过程中完成路径规划。Zhang S等[4]提出UAV感知过程和传输过程间的平衡问题,通过联合优化UAV感知时间、传输时间、UAV轨迹以及UAV的任务调度,最小化系统信息年龄。Zhang N 等[5]将地面物联网(Internet of Things, IOT)传感器节点的信息传输和能量采集UAV的飞行轨迹进行了联合优化,在保持UAV能耗尽可能低的前提下,最小化信息年龄(Age of Information, AOI)。
近年来,随着射频能量收集技术的研究和发展,成为解决能量受限问题的有效方式。Xiao H
等[6]研究了一种UAV辅助能量收集的认知无线电网络,其中UAV作为一个认知用户,悬停在空中执行频谱感知和与地面专用接收器通信。该UAV根据主用户的感知结果,自适应调整功率与地面专用接收器进行传输,并通过采集可再生能源,主动补充能量进行传输。Nguyen K K等[7]提出一种基于深度强化学习的UAV辅助D2D通信能量收集时间调度优化模型。Yuan X等[8]研究了一种基于UAV多用户无线供能传输网络,并在UAV轨迹设计中考虑了现实的非线性能量采集模型,将非凸问题转化为三个子凸问题,求得最优解。Liu Z等[9]针对基站空闲和繁忙时间的差异,研究了基于能量收集的最大下行总信息的功率分配问题,通过采用提出的策略使总信息量方面有不同程度的提高。无线信息和能量同传的概念最早是由Varshney L R[10]从理论的角度提出的。在5G通信时代,信息和能量同传技术(Simultaneous Wireless Information and Power Transmission, SWIPT)对于许多类型的现代信息传输系统和通信网络中的信息和能量传输至关重要。然而,无线通信领域需要对基本设计进行修改,以确保高效的SWIPT[11]。此外,信息速率与采集能量水平之间的平衡成为影响系统性能的重要因素[12]。
1 基于AOI的多目标信息传输模型
基于AOI的多目标UAV信息传输模型如图1所示。
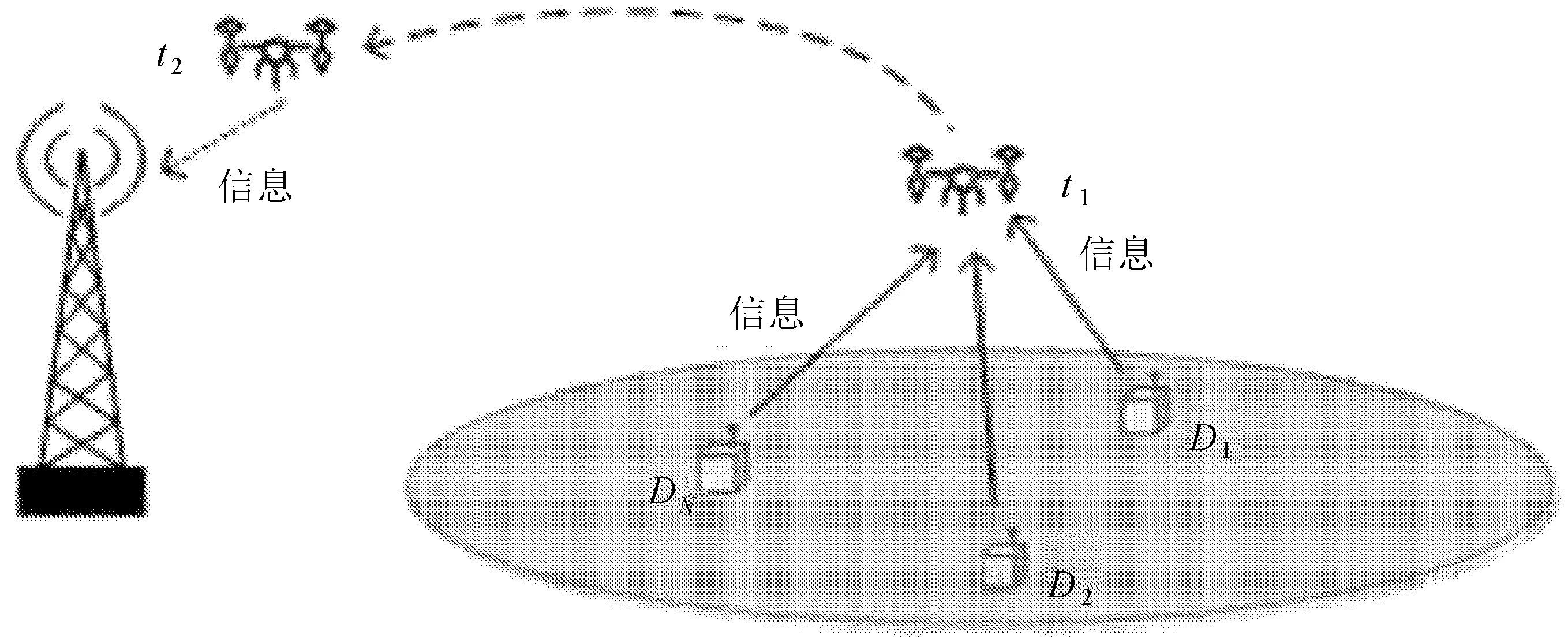
图1 基于AOI的多目标UAV信息传输系统模型
该系统包括一个基站、一架单天线UAV和若干物联网设备。这些IoT设备分布在一定区域内,将该区域内的所有设备组成一个设备集,并且每个设备均配备单个发射天线。UAV作为移动中继,在一定时间内收集IoT设备的信息并传送到基站,由基站做进一步的信息处理。UAV采用频分多址(Frequency Division Multiple Access, FDMA)的方式同时感知该区域中的设备信息。UAV采用存储转发工作模式,具体描述为,UAV首先飞行到适合同时感知设备信息的位置,悬停一段时间进行信息感知并存储,感知结束后飞行到适合传输的位置,将存储的感知信息发送给基站。
基于AOI的多目标UAV信息传输系统的传输协议如图2所示。
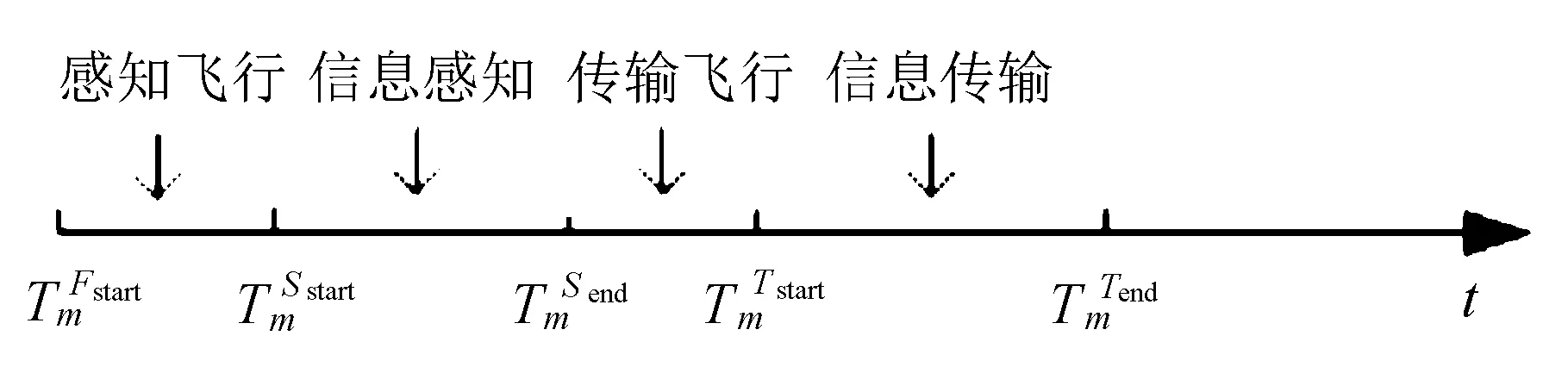
图2 基于AOI的多目标UAV>信息传输系统的传输协议
2 公式推导
2.1 信息传输速率
在三维笛卡尔坐标系中,设备Di的位置为Xi=(xi,yi,0)。t(t∈1,2,…,T)时刻,UAV的位置为
X(t)=(x(t),y(t),z(t)),
其飞行速度为v,那么t时刻UAV与设备Di之间的距离为

(1)
当UAV对设备信息进行感知时,成功感知Di的概率为

(2)
式中:ξ----调节感知性能的因子;

ωmax----设定的最大传输次数。
为了保证设备集中每个设备的传输质量,设置了UAV最小成功感知概率为Pth。因此,当UAV执行Di的信息感知时,感知成功概率必须满足:

(3)
当每个设备Di都满足式(3)时,UAV才开始悬停进行信息感知。UAV完成信息感知后,进入到UAV传输阶段。在此阶段,UAV将感知信息传输给基站。假设基站的位置为
XBS=(0,0,H),
t时刻,UAV和基站间信道的信道增益为
(4)
式中:μ0----UAV与BS距离为1 m时的信道增益;
α----信道衰减因子。
故t时刻,UAV与基站间传输链路的信噪比为

(5)
式中:σ2----零均值高斯白噪声的功率;
PT----UAV的发射功率。由此可得t时刻UAV与基站间的信息传输速率为
R(X(t))=Blog2(1+γ(X(t))),
(6)
式中:B----信道带宽。
为了保证传输质量,设置信噪比阈值为γth,BS的接收信噪比满足:
γ(X(t))≥γth。
(7)
假设UAV的信息感知速率为Rs。为了完成感知任务,UAV转发给BS的信息应不少于感知信息,故满足:

(8)
式中:t0----UAV感知一次设备信息所消耗的时间。
2.2 信息年龄优化
由2.1可知,文中总体目标为优化UAV感知和传输过程,最小化系统的AOI,因此,原问题可转化为优化UAV路径和感知次数以最小化系统信息年龄,可表示为
s.t. C1,C2,(3),(7),(8)。
(9)
1)UAV感知优化子问题;
2)UAV路径规划子问题。
在UAV感知优化子问题中,假定UAV的感知位置为XS,那么原问题可转化为
(10)
s.t.(3)。
对于单个设备来说,为使T时间内的总AoI最小,即总面积Q1+Q2+…+Qm+…最小,那么就需要每个Qm达到最小,如图3所示。
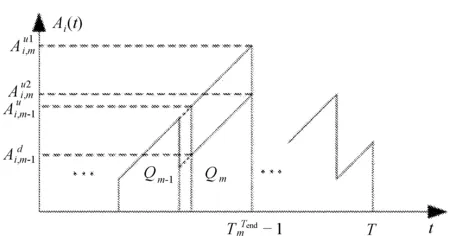
图3 信息年龄(AoI)与面积的关系


(11)


(12)

(13)
s.t.(3)。

(14)

(1+(1-e-ξdi(t))x)×

(15)

多目标UAV感知次数与飞行轨迹联合优化算法步骤如下:
1)建立势场模型,初始化引力系数ε,已知UAV的初始位置为X(0)=(x0,y0,z0),感知目标坐标为Xi=(xi,yi,0);
2)初始化UAV当前时刻坐标X(t);
3)根据建立的感知势场模型,计算如下参数:
①计算UAV与各设备间的仰角和方位角;
②计算UAV与各设备的感知引力;
③计算UAV当前位置的方向参数;
④计算UAV的下一个位置X(t+1);
4)按照合力方向找到下一个坐标;
5)保存UAV当前位置坐标,并修改当前位置坐标为X(t+1);
6)根据UAV成功感知概率,判断UAV是否到达感知位置。若已到达,则悬停进行数据感知,感知结束后执行7);否则,继续执行3);
7)根据建立的传输势场模型,计算如下参数:
①计算UAV与基站间的仰角和方位角;
②计算UAV与基站间的传输引力;
③计算UAV当前位置的方向参数;
④计算UAV的下一个位置X(t+1);
8)按照合力方向找到下一个位置;
9)保存UAV当前位置坐标,并修改当前位置坐标为X(t+1);
10)根据UAV信噪比约束,判断UAV是否到达传输位置,若已到达,则悬停进行数据传输,直到传输结束;否则,继续执行7);
11)获得最优路径,UAV完成一个回合的路径规划。
3 仿 真
考虑含有5个感知设备的UAV信息传输系统在人工势场下的UAV路径规划。通过Matlab平台对该过程进行仿真,首先,模拟UAV执行一次感知任务的路径;接着,验证了UAV在起始位置不同的情况下,总时间与系统信息年龄的关系。最后,将文中所提的多目标UAV感知次数与飞行轨迹联合优化算法与传统算法进行对比,证明了所提算法的优越性。
UAV在执行信息感知和传输过程中的参数设置以及仿真过程中的参数设置见表1。
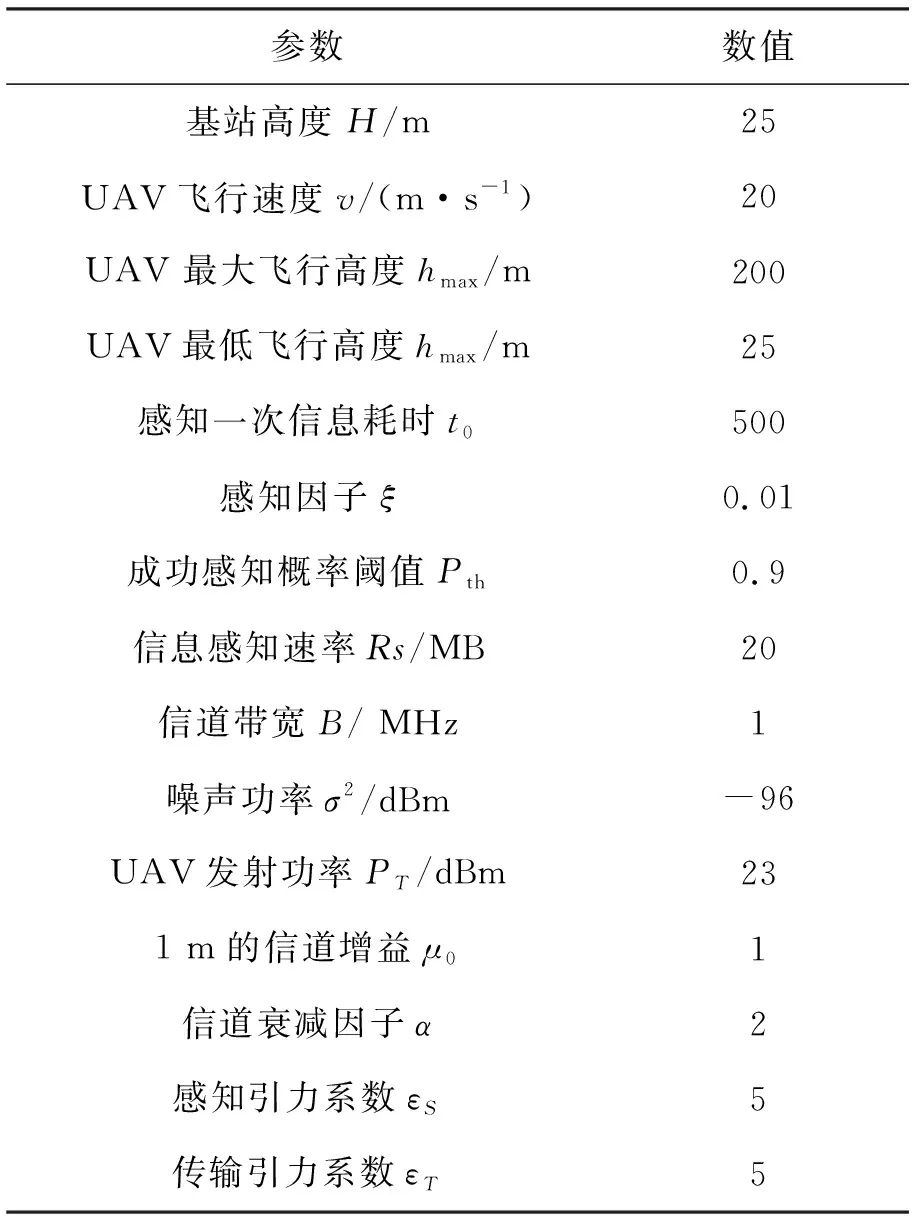
表1 参数设置
UAV感知和传输的飞行路径如图4所示。
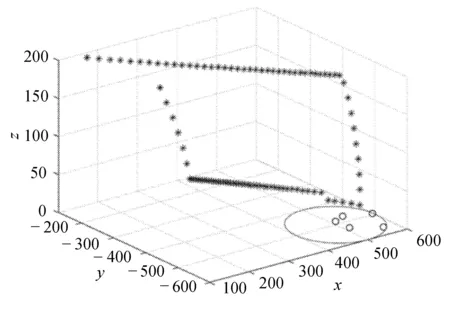
图4 多目标人工势场法下的UAV轨迹
UAV从起点(200,-200,150)出发,由于设备对UAV产生的z轴方向上的力要大于x轴和y轴方向上的力,因此合力倾斜度比较小,先向斜下方飞行,但是,由于UAV高度受限,当下降到一定高度后,便只受到x和y两个方向上力的作用,因此开始水平飞行,直到到达感知位置。在执行完信息感知后,UAV开始向基站飞行,同样先受到向左向上的力飞行到一定高度,然后水平飞行到满足信噪比要求的位置进行信息传输,信息传输结束后,UAV完成一个感知任务。
系统总信息年龄(AoI)随总时间变化曲线如图5所示。
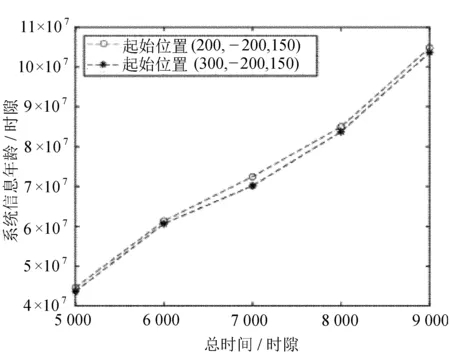
图5 系统总信息年龄(AoI)随总时间的变化曲线
从图5可以看出,总AoI随总时间的增加而增大。当UAV从不同的初始位置去执行感知任务时,UAV的初始位置与设备的距离越远,总AoI会越大。
JST算法与传统算法对比如图6所示。
从图6可以看出,文中提出的路径规划算法要优于传统算法,有效降低了系统的信息年龄。
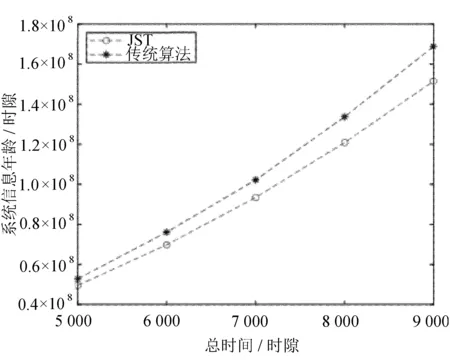
图6 JST算法与传统算法对比
4 结 语
通过构建多目标UAV信息传输系统模型及其传输协议,提出了多目标人工势场法的路径规划算法,详细阐述了UAV感知和传输过程,经过推导得出系统信息年龄表达式,通过所提的多目标UAV感知次数与飞行轨迹联合优化算法对系统信息年龄进行优化分析与求解。最后,在仿真实验中验证了不同参数对系统信息年龄的影响,通过与传统算法相比,证明了所提算法的优越性。
猜你喜欢
小猕猴智力画刊(2022年9期)2022-11-04
中国新通信(2022年4期)2022-04-23
建材发展导向(2021年18期)2021-11-05
中国传媒大学学报(自然科学版)(2021年1期)2021-06-09
中国传媒大学学报(自然科学版)(2021年1期)2021-06-09
家庭影院技术(2020年12期)2021-01-18
恋爱婚姻家庭·青春(2019年9期)2019-12-10
恋爱婚姻家庭(2019年26期)2019-09-14
探索科学(2017年4期)2017-05-04
小学生作文选刊·低年级版(2017年2期)2017-03-06