
高频地波雷达天线方向图校准方法研究
2022-11-08 08:55张东亮王心鹏王恒林
海洋技术学报 2022年5期
张东亮,王心鹏,王 斌,王恒林
(1.国家海洋技术中心,天津 300112;2.自然资源部北海预报减灾中心,山东 青岛 266061)
高频地波雷达利用海洋表面对高频电磁波的一阶散射和二阶散射机制实现对海流、海浪等海洋环境大范围和全天候的实时监测,是一种高效的海洋观测工具。高频地波雷达在探测海洋表面流场时,需要进行回波信号的到达角提取,不管是采用比幅测向还是多重信号分类(Multiple Signal Classification,MUSIC)算法,定向准确度受雷达天线方向图特性影响。为了保障雷达数据质量,需要对雷达天线方向图进行校准。欧美国家的高频地波雷达网均已将天线方向图校准作为确保海流观测数据质量的重要环节[1]。国内在行业标准《高频地波雷达现场比测试验规范》(HY/T 0280—2019)[2]中也强调了雷达在比测前需要对天线方向图进行测量和校准。为了确保高频地波雷达网设备运行质量,提高海流观测数据准确性,自2019 年底起,国家海洋技术中心联合武汉大学、武汉海兰瑞海海洋科技有限公司采用13 MHz 和16 MHz 单频信标的天线方向图测量系统[3]在自然资源部的OSMAR-S 雷达站进行了试应用,主要用来评估雷达天线方向图畸变和幅相校准情况。在上述工作基础上,本文进一步完善了基于单频信标的方向图校准系统,开展了与CODAR(CODAR Ocean Sensors Ltd.) 应答器对比验证和海流反演验证,为进一步推广高频地波雷达天线方向图校准应用奠定基础。
1 天线方向图校准方法对比
高频地波雷达天线方向图校准包含两个方面,首先是阵列天线各个天线单元信号的增益和初始相位不同,需要进行幅相补偿;其次,每个天线单元对各个方向的信号的响应特性受到环境和制造工艺影响导致天线方向图发生畸变,此时仍采用理想的响应特性去定位信号方向时会导致错误的方位判定,需要使用实际的方向图以减小畸变带来的影响。目前,雷达天线方向图校准方法可以分为“无源”和“有源”两大类,“无源”校准是通过对接收到的无先验信息的回波数据进行处理,从而实现对接收系统的校准[4-5]。“有源”校准是通过接收某一个或多个已知方位的信号源的来波实现接收系统的校准。“有源”校准方法通过应答器、单频信标等外部信号源进行校准,信号源带有轨迹记录,相比“无源”校准,受环境影响小,不仅可以获得天线单元间相位差异,而且可以测量天线方向图畸变。欧美等国家强调天线方向图校准,主要指使用“有源”校准方法对雷达进行校准。
“无源”校准方法信号来源为海洋、船只回波。对便携式高频地波雷达,“无源”校准主要流程为,首先选出一阶谱中较大的谱点,然后以理想情况下天线3 个单元相位差为0°作为约束条件进一步筛选谱点,接下来利用谱点的交叉谱求出相位差异,最后利用功率谱统计求出通道幅度差异[4-5]。“无源”校准方法优点是实时性好,无需额外成本,但是无法测量天线方向图畸变情况,通常用于设备的幅相自校准。我国国产高频地波雷达OSMAR-S系列就利用海洋回波实现天线幅相自校准,由于使用的算法仅考虑了单到达角频谱点占多数的情况,当雷达视角在180°范围内效果较好,当雷达被海所包围时这种方法就不能够严格成立[4]。
AIS(Automatic Identification System)舰船回波校准方法[6-7]是“有源”校准,将雷达检测舰船与AIS 系统报告信息进行匹配,获得船只回波的方位和距离,进一步获得天线方向图。合法舰船会通过AIS 报告自身航速和位置,只要雷达站周边有合法舰船活动,就可以校准雷达。该方法优点是使用成本比较低,天线方向图校准过程不会对雷达观测产生影响,在时效性上,可以实现对雷达天线特性的定期持续性校准。该方法存在的问题主要有在视角范围内上不一定都有船只活动,且舰船目标检测结果与AIS 报告位置准确匹配是获得准确方向图的前提。
使用应答器、单频信标等校准雷达天线时,需要使用载具携带信号源围绕雷达运动,同时记录坐标轨迹和时间,从雷达采样数据中提取应答器或单频信标信号,按照时间信息匹配经纬度,即可获得雷达天线方向图。武汉大学为OSMAR-S 开发了应答器[8-9],该应答器除了用于天线校准以外,还可以通过模拟多普勒频移来模拟目标的运动速度。应答器技术较为复杂,时钟稳定性要求高,因此成本较高。单频信标只需要一个能发出正弦信号的信号源,对频率稳定性和准确性要求不高,技术实现简单,常被用于阵列天线校准。
由于雷达收到“有源”信号信噪比高,降低环境噪声干扰,在准确性上,“有源”校准具有明显的优势,但是每次测量都需要租用船只,导致使用成本比较高,会给设备厂家和运维单位带来较大的负担,限制了推广应用。小型低成本无人机的广泛应用给雷达天线校准提供了一种新的低成本的承载平台。单频信标相对应答器来说,更易于小型化,适合小型无人机携带。小型无人机搭载单频信标不仅解决了“有源”校准的成本问题,而且由于无人机几乎不受地形限制,可以获得完整360°全方位的天线方向图,更具有优势。2017 年,WASHBURN L 等[10]尝试应用无人机校准天线方向图。2019 年,武汉大学也提出了适用于船、无人机等多种承载平台的单频信标高频雷达天线方向图校准理论和方法[3]。同年,国家海洋技术中心在自然资源部惠来、南澳等站点开展试点应用,使用了无人机搭载单频信标的方法。
通过以上对比分析,如表1 所示,单频信标的校准方法可应用于无人机/船两种平台,兼具灵活性、成本和测量精度的优势,是雷达天线方向图校准的首选。

表1 高频地波雷达天线方向图校准方法对比
2 单频信标天线方向图校准系统
2.1 MUSIC 算法
SeaSonde 雷达采用的是单极子交叉环天线。理想情况下,余弦环天线、正弦环天线、单极子天线的方向图函数见式(1)。

式中,θ 是信号源的到达角,以顺时针方向为正。
在理想模型基础上,阵列各个接收通道在第m个距离元、多普勒频率f 处的回波信号见式(2)。

式中,i 为接收机通道编号;k 为回波信号源数量。对于一个简单的沿岸流,在Bragg 散射区域内,每个多普勒单元只有1 或2 个方向到达角,而且单到达角的占多数,认为k =1。由通道快拍数据构建接收信号自协方差矩阵。

然后对其进行特征值分解后,利用导向矢量与噪声子空间的正交特性构造空间谱函数。

式中,θ 为搜索空间谱函数峰值位置的角度,即到达角[8]。
天线方向响应特性A(θ)参与空间谱函数计算,直接影响到达角估计的准确性。在实际应用中,由于天线阵元方向图本身不一定是理想的,并且还可能受到周边环境影响而发生畸变;各个通道信号增益和初始相位不同,这些都影响到达角的判定。因此,为了保障高频地波雷达数据可信,必须进行方向图校准,使用雷达天线实际方向图进行达到角估计。
2.2 天线方向图测量原理
在使用外部正弦连续波信号对高频地波雷达天线方向图进行校准时,雷达本身也要工作在正弦连续波模式,雷达接收机接收的信号见式(5)。

式中,f1为雷达本振信号频率;f2为校准信号频率;ϕi为天线第i 通道的相位;ai(θ)为天线第i 通道天线在θ 方向信号强度。由于使用外部信号源进行校准,相对船只回波、海洋回波来说,雷达接收机的收到信号信噪比很高,因此噪声ni(t)的影响可忽略。以单极子通道作为基准,进行归一化处理,幅度函数和相位函数分别为式(6)和式(7)。

天线方向图校准过程中,雷达接收机在进行数据采样时仍然按照原线性调频信号的快拍周期进行数据采集和保存。每个快拍时间内,可以认为信号源相对雷达天线的方向是不变的。将每个快拍计算得到的幅度、相位与方向对应,得到天线幅度和相位随方向的响应曲线。
从雷达天线方向图计算过程可知,使用单频信标方法,雷达需要保存原始时间序列数据或者经过第一次傅里叶变换的快拍采样数据。SeaSonde 系列雷达保存了原始时间序列数据,满足要求。依据上述计算方法和数据处理过程,设计软件,处理雷达数据、信标轨迹数据后得到雷达天线方向图。
2.3 测量系统
雷达天线方向图特性跟工作频率有关,这就要求单频信标必须能够按照实际雷达工作频率发送校准信号。重新设计的单频信标,采用STM32F103作为控制器,控制直接数字合成器(Direct Digital Synthesizer,DDS) 芯片AD9959,能够在3 MHz~50 MHz 频率范围,提供任意频率的正弦信号,满足高频地波雷达全频段校准需要。单频信标在设计时考虑了船载和无人机机载两种使用环境,尽量减小体积并降低重量。如图1 所示,单频信标与CODAR 应答器相比,重量和体积都大为减少。

图1 CODAR 应答器(黄色)与方向图校准装置中的信号源(白色)
用于处理CODAR SeaSonde 雷达数据的软件由Python 语言编写,Numpy 模块负责数据计算,使用Matplotlib 实现距离谱、距离—多普勒谱和天线方向图的可视化显示。
2021 年1 月,新的测量系统在乳山黄龙甲站(OSMAR-S 型雷达)进行了无人机吊载信标进行天线方向图测量试验。单频信标工作频率与雷达保持一致,为13 MHz。用无人机吊起后,围绕接收天线距离120 m 环绕飞行,雷达可以接收到校准装置的信号,如图2 所示。

图2 2021 年1 月在乳山黄龙甲站无人机挂载信号源和OSMAR-S 雷达信号接收试验
3 天线方向图校准系统试验结果
3.1 方向图校准试验结果
2021 年4 月28 日,在青岛南姜站对校准装置开展了首次试验。南姜站使用的是CODAR 的SeaSonde 系统,在2018 年底使用CODAR 的应答器完成了方向图校准。CODAR 应答器测量的方向图可以作为参考,用于检验校准装置测量结果。
在试验开始前,将雷达计算机时间与全球导航卫星系统(Global Navigation Satellite System,GNSS)时间同步。关闭雷达发射信号,并将雷达配置为CW 模式。雷达工作频率24.7 MHz,调整校准装置发射信号频率为24.7 MHz。检查雷达可以收到校准装置发送的信号后,开始试验。
由船只携带方向图校准装置,围绕高频地波雷达接收天线运动,利用GNSS 模块,同步记录信号源经纬度坐标。图3 为船只运行轨迹,距离接收天线最近距离约200 m,最远距离约1 km。

图3 南姜站试验船移动轨迹
将天线方向图校准装置的数据处理软件中方向图平滑角度设置为10°,与SeaSonde 系统方向图平滑尺度保持一致。南姜站雷达天线方向图校准结果如图4 所示,与2018 年使用CODAR 应答器的校准结果对比曲线见图5,二者基本一致,A 环和B 环幅度响应误差统计见表2。

表2 方向图校准装置与应答器校准结果的误差统计
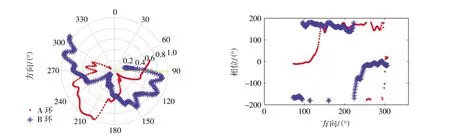
图4 2021 年4 月实测高频地波雷达天线方向图
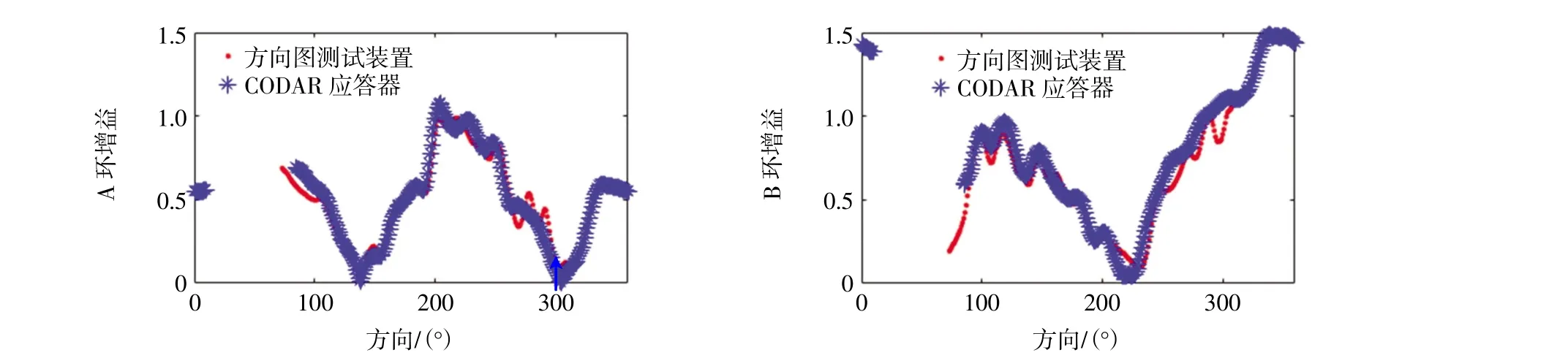
图5 2021 年4 月使用方向图校准装置与2018 年使用CODAR 应答器校准的方向图对比
3.2 海流比测试验结果
为了验证方向图校准效果,2021 年5 月9 日,使用声学多普勒流速剖面仪(Acoustic Doppler Current Profiler,ADCP)开展海流对比观测试验。比测站位在雷达站东南方向16 km 处,坐标东经120.433 9°,北纬35.962 5°,由于受突发天气影响,比测时间仅持续8 个小时。
雷达数据包括两组,一组是南姜雷达站输出的采用应答器校准的径向流场数据;另一组是课题组根据雷达保存的交叉谱数据,在数据处理软件中导入4 月28 日试验获取的实测天线方向图,获得雷达实测径向流场数据,如图6 所示。数据处理软件每30 min 输出一场径向流数据。数据处理方面,雷达输出的数据经过时空滤波,剔除奇异值。ADCP 输出数据10 min 一组,将ADCP 数据按照雷达采样时间进行平滑滤波和抽取,保持采样时间一致,然后统计均方根误差。以ADCP 在雷达方向的海流分量与两组雷达径向流场中该站位的观测值进行对比,如图7 所示,三者变化趋势基本一致,统计误差特征,课题组方向图校准结果均方根误差7.8 cm/s,CODAR 应答器校准结果均方根误差为7.9 cm/s,基本一致。
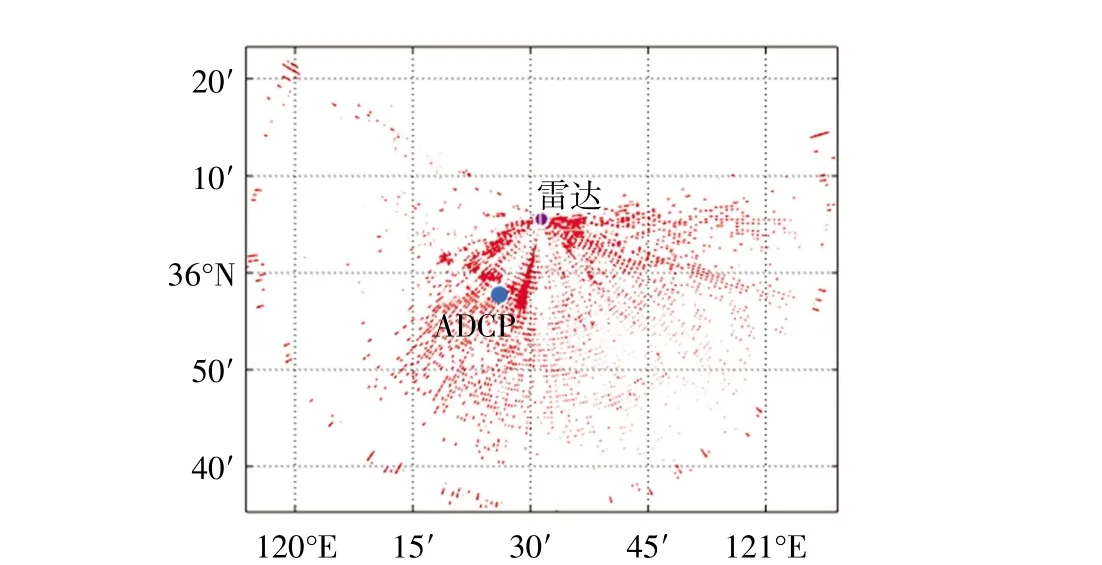
图6 经过方向图校准后的径向流场
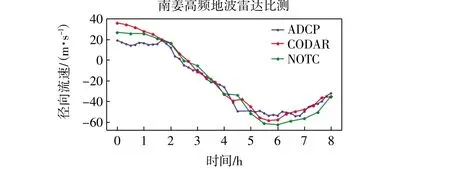
图7 比测站位径向海流对比
4 天线方向图校准注意事项
通过之前单频信标无人机机载应用和本次船载平台的使用,对校准过程中需要注意事项总结如下。
(1)校准频率应该与雷达观测时使用的工作频率一致。雷达天线特性会随工作频率变化,当雷达频率变化超过一定范围时,需要重新校准雷达天线方向图。
(2)天线方向图测量过程中,无人机或船围绕接收天线运动,尽量覆盖雷达观测角度范围,不必严格按照圆形轨迹航行,信标与接收天线距离不小于3 倍波长。
(3)无人机搭载信标时,建议信标天线距海面高度不超过5 m,飞行速度不高于1(°)/s。
(4)如果使用大功率单频信号源,应注意雷达接收机所有天线通道接收信号是否饱和,如果出现某一通道信号饱和,则认定此次测量无效,需要降低信标发射功率或者增大与接收天线的距离,重新测量。
5 结 论
本文首先对比了高频地波雷达天线校准方法;然后完善了单频信标天线方向图校准系统,设计了可在3 MHz~50 MHz 范围内调整频率的单频信标,研究并实现了SeaSonde 雷达的单频信标方向图校准方法;接下来在南姜站实测天线方向图与SeaSonde应答器测量结果基本一致,进一步的海流比测试验和基于实测天线方向图的海流反演结果表明该方法可用于SeaSonde 雷达校准,最后总结了天线方向图校准中的注意事项。自然资源部及地方涉海部门使用的便携式高频地波雷达主要有OSMAR-S 和SeaSonde 两个系列,均可以采用单频信标校准方法,此项技术的应用推广能够提高对高频地波雷达网的技术保障能力,提高观测数据质量。
猜你喜欢
铁道通信信号(2020年9期)2020-02-06
铁道通信信号(2018年3期)2018-04-19
家庭影院技术(2017年8期)2017-10-13
家庭影院技术(2017年9期)2017-09-26
铁道通信信号(2016年4期)2016-06-01
电测与仪表(2016年8期)2016-04-15
西部广播电视(2015年5期)2016-01-16
长春理工大学学报(自然科学版)(2015年4期)2015-12-07
全球定位系统(2015年4期)2015-02-28
城市轨道交通研究(2015年11期)2015-02-27
