TCP/AWM网络系统的自适应有限时间漏斗拥塞控制
2022-11-08 11:18井元伟谢海修
东北大学学报(自然科学版) 2022年10期
井元伟,谢海修,白 云
(东北大学 信息科学与工程学院,辽宁 沈阳 110819)
近些年来,随着网络的快速发展和科技的不断创新,用户对网络服务质量的要求也逐渐提升.为了保证人们的生活质量和工作效率,如何避免网络拥塞、提升网络性能,成为互联网领域的热点问题.目前,将端到端的传输控制协议(transmission control protocol,TCP)与主动队列管理(active queue management,AQM)算法相结合是解决TCP网络拥塞问题的一种广泛且有效的方法,从而实现网络资源的合理分配[1].最早提出的AQM算法是随机早检测(random early detection,RED),虽然RED算法可以减少数据包丢失和提高链接利用率,但是其设计参数对网络环境变化非常敏感[2].
随着TCP网络建模技术的发展,根据流体流理论,Misra等[3]在2000年建立了TCP网络的非线性动态模型,该模型为研究者们基于控制理论设计AQM算法奠定了基础.由此产生了许多AQM方案[4-6],不仅解决了网络中存在的传输延迟、外部干扰和网络参数频繁变化等问题,而且具有较好的稳定性和鲁棒性.
AQM算法虽然能够直接获得队列长度和吞吐量等信息,但只能通过丢包间接地控制源端的发送速率.然而,丢包会使拥塞控制机制发生作用,进而使得发送窗口急剧减小,增加了稳定队列的难度.基于上述不足,Barbera等[7]提出了主动窗口管理(active window management,AWM)算法.这种算法在不修改源端节点拥塞控制算法的情况下,能够直接控制发送端窗口的大小,避免了发送速率的突变.在文献[8-9]中,对于AWM的研究主要集中在网络性能的分析和比较上,并没有从控制理论的角度对AWM机制进行深入研究.文献[10]首次将AWM算法部署在路由器中,提出了一种基于PID的窗口控制规律,降低了系统潜在的不稳定性,但是PID控制参数设置固定,当网络环境变化时,算法的性能将会下降.
在实际网络中,运行在用户数据报上的UDP流会干扰TCP流的正常传输,进而占用TCP网络的带宽.同时,在网络拥塞控制信号传输的过程中,当受到外界环境的干扰,如噪声、交流电以及人为因素等,将会使传输的信号发生畸变,从而使得确认报文误码率增加.为解决上述问题,研究者们提出了一些鲁棒控制器以应对外部扰动对系统的影响,如文献[11-13]分别利用H∞控制、干扰观测器、Minimax理论对TCP网络系统中存在的UDP流进行了处理,设计了相应的网络拥塞控制器,提高了系统的抗干扰性和鲁棒性.
为保证TCP/AWM网络系统的队列跟踪误差满足预先指定的暂态和稳态性能,从而规范系统中的队列长度,因此引入漏斗控制对误差进行限制.漏斗控制于2002年首次被提出[14],随后,取得了丰富的研究成果[6,15-16].其中,文献[15]提出了一种新的漏斗控制技术,解决了漏斗变量不可导的问题.在此基础上,文献[16]结合固定时间漏斗边界和任意时间稳定理论,设计了一个AWM控制器,跟踪误差不仅在任意设定时间内收敛到原点,而且始终保持在所设计的漏斗边界内.然而,该模型并未考虑外部扰动对TCP/AWM系统的影响.
在工程实践中,为了获得更好的系统性能,通常要求系统具有一定的快速收敛特性.因此,有限时间稳定控制的研究应运而生.相比于Lyapunov渐近稳定,有限时间稳定意义下的控制器可以使状态变量在有限时间内收敛到平衡点或平衡点的小邻域内,具有动态响应快、精度高等优点.基于此,文献[17]提出了一种有限时间控制(finite-time control,FTC)的基本设计和分析方法.随后,许多学者研究了FTC的各种稳定性和稳定方法[15,18-19].如文献[15]设计了一种自适应有限时间模糊漏斗控制器,保证了闭环系统的所有信号是有界的.文献[18]基于自适应模糊控制方法研究了一类具有外部扰动的高阶非线性系统的自适应实际有限时间控制问题.文献[19]针对一类非严格反馈非线性系统首次提出了一种半全局有限时间实际稳定性判据.然而,到目前为止,还没有关于针对TCP/AWM网络系统的自适应有限时间拥塞控制的研究.
受上述讨论的启发,本文将RBF神经网络、漏斗控制、有限时间控制和Backstepping设计方法结合解决了具有外部干扰的TCP/AWM网络系统的拥塞控制问题.具体方法:①为了使TCP/AWM网络系统更接近真实情况,在原模型的基础上改进了网络动态模型,同时考虑了外部扰动对队列变化率和窗口变化率的影响;②基于有限时间稳定理论,引入漏斗控制限制队列跟踪误差,保证了跟踪误差在有限时间内收敛到给定的漏斗边界内,提高了TCP/AWM网络系统的暂态性能和稳态性能.
1 问题描述
1.1 TCP/AWM网络模型
Barbera等[7]为了获得链路容量的最大利用率,降低网络往返时延和丢包率,提出了TCP/AWM网络模型:
(1)
其中:q(t)为路由器瞬时队列长度;W(t)为TCP网络发送窗口大小;R(t)为往返时延;N(t)为TCP会话数;C(t)为路由器链路带宽;Tp为传播时延;u(t)为待设计的控制器.此外,在实际的网络环境中,N(t)和C(t)在相当长的一段时间内变化缓慢.因此为研究方便,将其看作常数,记为N和C.
令x1(t)=q(t),x2(t)=W(t),同时考虑外部干扰对系统的影响,则变量代换后系统(1)可以写为
(2)
其中:f(t,x)=NC/(x1(t)+TpC);x=[x1(t),x2(t)]T;y(t)为系统输出;ω1(t)和ω2(t)为外部扰动.
模型(2)不同于现有文献[10-11,13,16]中所使用的模型.其中,文献[10,16]并未考虑外部扰动对系统的影响.值得注意的是,在实际网络中,UDP流会干扰TCP流的正常传输,进而占用TCP网络的带宽,所以在常值链路带宽的基础上,减去UDP流所带来的外部干扰,以此来表示某一时刻的链路容量.此外,通信网络还存在确认报文误码率的问题.高误码率会损坏报文,造成更多的数据包丢失,从而降低数据的传输速率和网络性能[20].因此,将UDP流和误码率作为外部扰动,并考虑其对TCP网络系统的影响是十分有必要的.然而,文献[11,13]仅仅考虑了外部扰动对系统单一状态的影响.因此,本文在现有模型[10-11,13,16]的基础上,考虑了不同的外部扰动分别对队列变化率和窗口变化率的影响,使TCP/AWM网络系统更接近真实情况.
TCP/AWM拥塞控制算法通过直接设计窗口的变化规律,进而控制系统发送数据的速度,使得瞬时队列长度稳定在期望队列长度附近,从而提高系统性能.因此,为获得预期的控制目标,在控制器设计过程中需要引入以下假设.
假设1 外部扰动ωi(t)(i=1,2)是连续且有界的.
假设2 期望队列qref(t)及其导数连续且有界.
1.2 预备知识
定义1[18]考虑非线性系统:
(3)
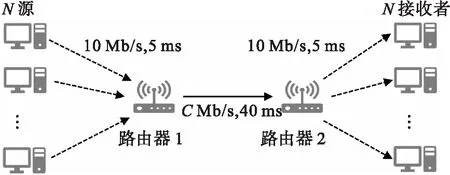
其中:x和u分别表示系统的状态和输入;d(t)为外部扰动;f(·)在原点的邻域内是连续的.对于每一个初始状态x0=x(t0),如果存在常数ε>0和0 引理1[19]对于非线性系统(3),如果存在一个正定函数V(x)∈C1和常数a>0,b>0,0<γ<1,0<φ<1,对∀t≥0满足: (4) 则系统(3)是SGPFB,并且稳定时间Ts满足: (5) 引理2[19]对于任意连续的非线性函数F(X),存在RBF神经网络能够在紧集ΩX⊂Rq上以任意精度逼近未知非线性函数,即 F(X)=WTH(X)+δ,|δ|≤δ*. (6) 其中:W=[w1,w2,…,wl]T∈Rl是权重向量;δ是神经网络的近似误差;δ*是δ的上界.X∈ΩX⊂Rq是输入向量;H(X)=[h1(X),h2(X),…,hl(X)]T∈Rl是基函数向量,hi(X)为式(7)形式的高斯函数: (7) 其中:ζi=[ζi1(X),ζi2(X),…,ζiq(X)]T为基函数的中心;ηi为高斯函数的宽度. 引理3[19]对于x∈R和y∈R以及任意正实数a,b和c,有式(8)成立: (8) 引理4[20]对于xi∈R,i=1,2,…,n和0<γ<1,有式(9)成立: (|x1|+…+|xn|)γ≤|x1|γ+…+|xn|γ. (9) 为了使队列跟踪误差e1(t)=x1(t)-qref(t)具有更好的暂态和稳态性能,受文献[15]的启发,选择漏斗边界函数ρ(t): ρ(t)=(ρ0-ρ∞)e-βt+ρ∞. (10) 其中:ρ0>0为漏斗边界函数初值且满足|e1(0)|<ρ0;ρ∞>0为设计常数;β>0决定ρ(t)的收敛速度. 定义误差变换函数: (11) 经计算可得ζ1(t)关于时间t的导数为 (12) 本节针对TCP/AWM网络系统(2)设计了一个自适应有限时间跟踪控制器.通过稳定性分析表明跟踪误差在有限时间内是有界的且处于预先设定的漏斗边界内. 根据反步法的思想,定义如下坐标变换: z1=ζ1, (13) z2=x2-α1. (14) 其中,α1是虚拟控制律. 步骤1 求取z1的导数: (15) 选取Lyapunov函数: (16) (17) 其中,F1=Γω1. 采用RBF神经网络去逼近非线性函数F1: (18) (19) 其中,a1>0是设计参数. 将式(19)代入式(17),可得 (20) α1= (21) (22) 其中:k1>0;σ1>0; 0.5<γ<1是设计参数. 将式(21),式(22)代入式(20),可得 (23) 步骤2 求取z2的导数: (24) 选取Lyapunov函数: (25) (26) 采用RBF神经网络去逼近非线性函数F2: (27) (28) 其中,a2>0是设计参数. 将式(28)代入式(26),可得 (29) (30) (31) 其中,k2>0,σ2>0是设计参数. 将式(30)~式(31)代入式(29),可得 (32) 到此,TCP/AWM网络系统的自适应有限时间跟踪控制器设计完成. 在本小节中,针对TCP/AWM网络系统(2)进行稳定性分析,并给出该系统是SGPFB的充分条件. 定理1考虑具有外部干扰的TCP/AWM网络系统(2),在假设1和假设2以及|e1(0)|<ρ0的条件下,如果选择合适的虚拟控制律(21),实际控制律(30)以及自适应律(22)和(31),则闭环系统的所有信号是SGPFB,同时队列跟踪误差e1(t)始终保持在预先设定的漏斗边界内. 证明 根据Young’s不等式,可得 (33) (34) 将式(33)~式(34)代入式(32),可得 (35) 根据引理4,式(35)进一步有 (36) 其中,μ=min{2γ-1k1,2γ-1k2,σ1,σ2}. (37) 将式(37)代入式(36),并结合引理4,可得 (38) 其中,Θ=μ(1-γ)γγ/(1-γ)+Δ. 根据引理1有,稳定时间为 (39) (40) 将式(40)分为两种情况讨论,具体内容如下: (41) 将式(41)代入式(40),进一步得到 (42) 解不等式(42),可得 (43) 其中,当T>Ts时,进一步有 (44) 根据式(16)和式(25),可得 (45) 由式(44),式(45)有 (46) (47) 最终,可以得出 (48) 因此,队列跟踪误差e1(t)始终被约束在预先设定的漏斗边界内. 在本节中,考虑具有N个TCP流会话数的单瓶颈哑铃型的网络拓扑结构,如图1所示.通过使用MATLAB/SIMULINK将本文获得的AWM算法进行仿真研究,验证所提方法的可行性和优越性. 图1 单瓶颈哑铃型网络拓扑结构 TCP/AWM网络系统的参数选择如下:N=100,C=1 750 P/s,Tp=0.15 s,qref(t)=100 P,初始状态x0=[120,0.1]T.控制器的参数设计如下:k1=12,k2=80,γ=0.99,a1=1,a2=0.4,r1=10,r2=100,σ1=0.01,σ2=0.01.漏斗边界函数参数选择为ρ0=25,ρ∞=0.5,β=18.外部扰动分别选择为ω1(t)=1.25sin(6t)+0.75cos(πt)+2 P/s 和ω2(t)=0.05e-0.2tP/s.其中,P表示包(packet). 图2依次表示路由器的瞬时队列长度q(t)、系统窗口大小W(t)及本文所提出的AWM拥塞控制器u(t)的响应曲线,可以看出队列长度、窗口大小和控制输入均是SGPFB. 图2 系统状态变量及控制输入的响应曲线 为了说明所提方法的有效性,将本文的仿真结果与文献[10]的PID方法和文献[13]的Minimax方法进行比较,得到如图3,图4所示的仿真结果. 由图3可以看出,所设计的控制器能够使队列跟踪误差在有限时间内收敛到原点的小邻域内并且一直保持在预设的漏斗边界内.与 PID 方法相比,它具有更快的收敛速度以及更小的超调量.虽然Minimax方法所获得的队列跟踪误差的收敛速度与本文方法的收敛速度近似相同,但是由图4可以看出,Minimax方法的控制信号的幅值要远大于本文所提方法.此外,根据系统窗口大小的对比曲线图可知,虽然三种方法的窗口大小最终均收敛在3.63 P附近,但是本文所提方法的窗口大小的超调量更小,收敛速度更快. 图3 队列跟踪误差及窗口大小的对比结果 图4 控制输入的对比结果 在本文中,利用有限时间稳定理论、漏斗控制、RBF神经网络和Backstepping技术,提出了一种TCP/AWM网络拥塞控制系统的自适应有限时间控制方法.采用RBF神经网络逼近外部干扰,可以很好地抑制干扰对系统的影响.通过稳定性分析证明了闭环系统中的所有信号都是有界的,并且可以使得路由器队列长度在有限时间内跟踪上期望队列.最后,将本文设计方法分别与现有的两种方法作对比,不难发现,所设计的控制器可以使系统响应更快,超调更小,进一步验证了所提方法的有效性. 在未来的工作中,考虑多瓶颈拓扑结构或者利用多智能体系统的设计思想,可以将该方法推广到多路由的TCP/AWM网络中,同时应用网络模拟器如NS-2/3验证所提算法的性能.1.3 漏斗控制和误差变换
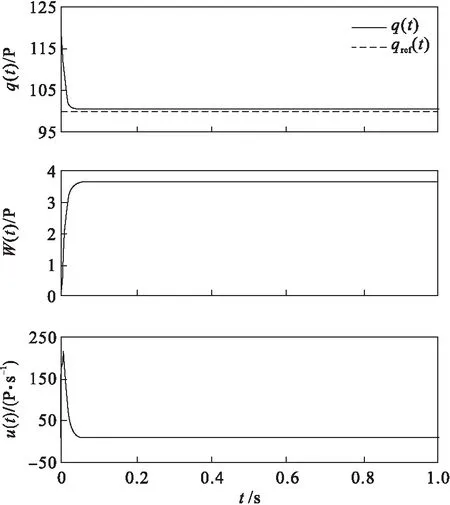
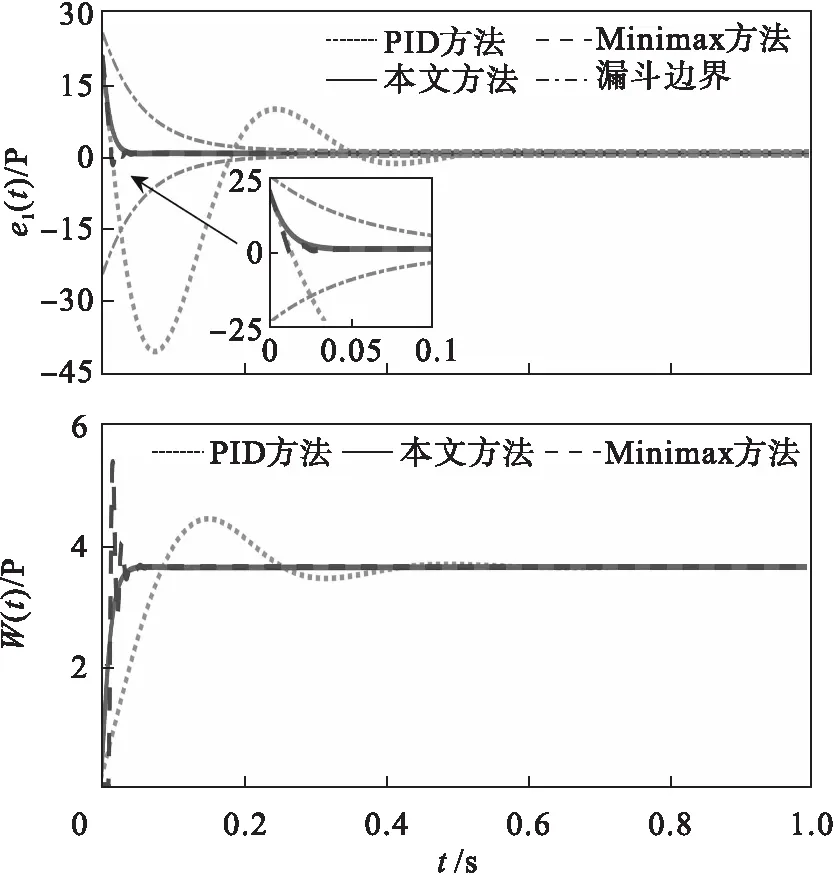
2 主要结论
2.1 自适应有限时间控制器设计







2.2 稳定性分析




3 仿真及结果

4 结 语
猜你喜欢
上海师范大学学报·自然科学版(2022年3期)2022-07-11
现代电力(2022年2期)2022-05-23
山东建筑大学学报(2021年6期)2021-12-23
北京航空航天大学学报(2021年7期)2021-08-13
山西青年(2020年13期)2020-12-08
科学导报·学术(2020年26期)2020-10-21
小学生学习指导(低年级)(2020年4期)2020-06-02
软件(2020年3期)2020-04-20
四川大学学报(自然科学版)(2020年2期)2020-04-01
军营文化天地(2018年2期)2018-12-15