输入时滞非线性系统的新型动态面Funnel控制
2022-11-07 10:50王清华张桂林李洪芹刘海珊
控制理论与应用 2022年8期
王清华 ,刘 烨 ,张桂林 ,李洪芹 ,刘海珊
(1.上海工程技术大学电子电气工程学院,上海 201620;2.山东科技大学电气与自动化工程学院,山东青岛 266590)
1 引言
近年来,输入时滞的控制问题是时滞系统的基本问题之一,在机器人、电力网络和航空航天等控制系统中普遍存在,因此如何处理输入时滞项引起了广泛关注.其中,一个基本思想是预测反馈[1-2].由于分布特性,传统的基于预测的方法在实际应用中难以实施.文献[3-6]则忽略了分布项,在预测反馈的基础上提出了截断预测反馈控制方案,并避免反馈律无穷维性问题.进一步,对于输入时滞的研究扩展到了不确定非线性系统里.文献[7]假设非线性函数满足Lipschitz条件将截断预测反馈控制方案扩展到输入时滞非线性系统中.文献[8-9]提出了改进的预测方案解决带有扰动的非线性系统的输入时滞问题.针对一类相似的带有输入时滞非线性系统[10-13],为消除输入时滞的影响,设计了包含过去控制值有限积分的辅助跟踪误差时滞补偿项.此外,Pade逼近方案[14-19]被广泛应用于带有输入时滞的严格反馈非线性系统,因为逼近误差要求趋于零,所以Pade逼近方案仅能处理较小的时滞系统.不仅Pade逼近方案要求输入时滞较小,以上控制方案对输入时滞都要求很小,对较大的时滞跟踪效果不理想,甚至失效.
随着工业的迅速发展,基本的稳定性已经满足不了工业发展的要求,人们期望设计的控制方案不仅能满足系统的稳态性能,还能保证瞬态性能.为此文献[20-21]提出了预设性能方案,通过引入严格递增的误差转换函数,将对系统误差的约束转换成无约束的问题,该方法需要对误差转换函数求逆,可能存在奇异性问题,造成系统不稳定[22].于是Ilchmann[23]等人提出了Funnel控制,根据高增益的理念,设计可调节的时变增益控制一类一阶或二阶系统,保证系统的瞬态和稳态性能.文献[24]针对相对度为二的单输入单输出最小相位系统,设计了Funnel预补偿器控制方案,保证了系统跟踪误差的预定性能.文献[25]设计了一种无模型Funnel控制方案,保证了相对阶非线性系统的瞬态和稳态性能.然而Funnel控制主要适用于阶数为一或二的系统,限制了Funnel控制在实际控制系统的应用.此外,在输入时滞的研究领域,对于保证系统跟踪误差瞬态性能的研究还不太充分.
最近,对于输入时滞系统的研究主要集中于以下几个方面: 1) 满足大时滞要求.在位置误差中设计输入时滞积分辅助项[26-27],通过对输入时滞的积分消除时滞的影响,但是无法将该方法扩展到时变时滞系统.文献[28-29]设计了输入时滞补偿系统,但在反推设计中每步都要补偿,为保证系统稳定,还需要证补偿系统有界;2) 采用动态面方法[8,18,26]解决反推中因重复微分引起的“微分爆炸”问题.该方法虽然能有效简化控制器设计过程,减轻计算负担,但是一阶低通滤波器存在的边界层误差无法消除,使得跟踪误差不能渐近收敛到零;3) 提高系统的瞬态跟踪性能.由于既要处理输入时滞,又要保证系统瞬态性能,给控制设计带来了极大挑战,所以目前对该问题的研究不是太充分.文献[30]应用预设性能技术研究了带有输入迟滞的大范围非线性系统,提高系统瞬态和稳态跟踪性能,但预设性能需要对性能函数求逆,存在奇异性问题.
综上所述,尽管已经取得了关于输入时滞非线性系统研究的丰硕成果,但是如何设计出使得输入时滞非线性系统跟踪误差渐近收敛到零且满足大时滞需求的控制器是极具挑战的.其难点在于输入时滞补偿的设计需要满足大时滞的要求,以及神经网络逼近误差、模糊逼近误差和动态面边界层误差等的处理.
本文研究了输入时滞非线性系统的新型动态面Funnel控制.其研究动机是对于机器人、电力网络和航空航天等控制系统,其大多数情况信号传输都存在时滞,在这种情况下仍然保持较高的跟踪性能.本文通过设计输入时滞补偿动态变量,构造Funnel函数结合非线性滤波器设计了带有输入补偿动态变量的新型动态面Funnel控制方案.该方案主要贡献有: 1)设计了输入时滞的补偿动态变量,仅需在最后一步补偿,从而优化了控制器设计过程,且满足大时滞要求;2)基于正时变积分函数设计的非线性新型滤波器,不仅避免了反推控制“微分爆炸”问题,而且消除了边界层误差,并保证了系统的跟踪误差渐近收敛到零;3)通过Funnel控制不仅避免了预设性能控制中的奇异性问题,而且保证了跟踪误差的瞬态和稳态性能.
2 问题描述及假设
考虑到如下输入时滞不确定非线性系统:
本文的控制目标是使闭环系统所有信号一致有界,并且使跟踪误差e1=y-yr最终渐近收敛到零.为了实现控制目标,需要一些假设和引理.
假设1系统(1)在0 ≤t≤τ0不会趋于无穷,且τ0≥τ(t).
假设2跟踪期望轨迹yr和其一阶导数与二阶导数是已知有界的.
引理1[31]对于任何σ >0和μ ∈R有不等式

引理2[28]定义紧集Ωx ⊂Rq,对于任何未知连续的函数f(·)存在神经网络WTΦ(x)如下:

其中:Φ(x)=[φ1(x)···φl(x)]T∈Rl是基函数向量,ε(x)为逼近误差,l >1是神经元的个数,基函数选择高斯径向基函数
其中:ui=[ui1···uiq]T为高斯径向基函数的中心点坐标矢量,η为高斯径向基函数的宽度,W=[w1···wl]T是神经网络的权值,被定义为

引理3[22]Funnel控制是利用时变的控制增益ϖ(·)来控制相对阶为一或者二的已知高增益系统S的一种控制方法.控制增益ϖ(·)设计如下:
但是,以上的Funnel控制方法被限制在相对阶数为一阶或者二阶的系统,因此本文采用改进的误差转换函数ς(t)=e(t)/(Fφ-‖e(t)‖)新的变量ς(t)不受系统阶数的影响,并结合新型动态面控制技术,保证了系统的瞬态性能且稳态误差最终收敛到零.
注1假设1为了保证系统的可控性,为输入时滞系统中的常用假设[28],实际中许多工业系统可以满足.假设2为自适应动态面控制方案基本条件要求,存在大量文献中[8,10-13,15-18,27-30].
3 控制器设计
设计如下输入时滞补偿动态变量:

其中:λ为正的设计参数,补偿动态变量的初始值h(0)=0.
各位置误差设计参考如下:

其中αi为第i步设计的虚拟控制律.
注2如果系统无时滞,即τ(t)=0,则补偿动态变量h=0,且补偿动态变量(8)的设计比文献[28-29]更具有普遍性和应用性,因为补偿动态变量仅在最后一步中应用,无需在递归设计的每步都补偿,所以减轻了计算负担,优化了控制器的设计过程.
步骤1根据引理3,跟踪误差e1的Funnel误差变量为s=e1/(Fφ-|e1|),由引理2和式(9)得

其中β=1/(Fφ-|e1|).
设计第1个虚拟控制律和神经网络权值与神经网络误差的自适应律为

其中σ1和σ2是正的常数.
步骤i根据式(9)和引理2,第i个位置跟踪误差ei,i=2,···,n-1的导数为
设计第i个虚拟控制律和神经网络权值和神经网络误差自适应律为

设计实际控制律u(t)和神经网络权值和神经网络误差自适应律为
注3通过Funnel边界函数,将系统的跟踪误差限制在给定的范围内,保证了系统的瞬态性能,即能够设定系统的收敛速度及最大超调量.同时避免了传统预设性能方法中出现的奇异值现象.
4 稳定性分析
对边界层误差zi(1 ≤i≤n-1)求导如下:
其中Bi(·)由虚拟控制律求导组成的已知连续函数.
选择Lyapunov函数L如下:
其中γMj,j=1,···,n-1为正的设计参数.
定理1对由式(1)组成的系统,利用新型非线性滤波器(14)和(20),神经网络权值自适应律(12),(18)和(23)及神经网络误差自适应律(13),(19)和(24),结合控制律(22),根据假设1-2,当L(0)≤L0时,L0为一个正的常数,存在ci,γW i,γεi,i=1,···,n和τj,γMj,j=1,···,n-1,使得闭环系统所有信号半全局一致有界,并且跟踪误差e1=y-yr渐近收敛到零.
证定义紧集Ω1和Ω2

5 仿真分析
考虑单力臂机械手控制系统[26]

其中:N表示转动惯量,m为连杆的质量,g是重力加速度,l表示连杆的长度,Q表示连杆的角位置,表示连杆的角速度,表示连杆的角加速度,ι是控制量.在单力臂机械系统中,输入时滞可能是系统设计结构固有的,也可能是传输延时,通信延时和传感器响应延时等.定义x1=Q,x2=,ι=u(t-τ(t)).则式(36)可以表示成如下形式:
其中:f2(x)=1/N(2x2+mglsinx1),取输入时滞τ=0.01|sint|,期望跟踪信号为yr=sint.
基于本文的控制方案,Funnel的边界函数取为Fφ(t)=e-0.05t+0.002,输入时滞的补偿动态变量设计为=-u+u(t-0.01|sin(t)|)-2h,系统参数为m=1.0 kg,g=9.8 m·s-2,l=0.75 m,N=4/3ml2(kg·m2).系统的初始状态为(x1(0),x2(0))=(0,0),其他自适应参数的初始值都为0.选取设计参数为c1=25,c2=15,γε1=12,γε2=15,γW1k=0.02,γW2k=0.03(k=1,···,l),非线性滤波器设计参数为τ=0.01,γM=2,σ(t)=0.01e-0.01t.
仿真结果如图1-4所示.由图1可知本文的控制方案具有良好的跟踪性能.图2中曲线表明跟踪误差一直在Funnel边界内,保证了跟踪误差的瞬态与稳态性能,并且最终跟踪误差收敛到零.而文献[29-30]中所设计的控制方案都只能使跟踪误差收敛到一个小邻域内,不能保证渐近收敛到零.图3验证了神经网络误差和的自适应律都是有界.图4曲线表明了控制信号u有界.对于状态预测控制[8]与Pade逼近控制[16],在相同的环境下,无法控制系统(36).仿真结果表明本文的控制方案不仅能消除大时滞的影响,还能保证系统的跟踪误差渐近收敛到零.
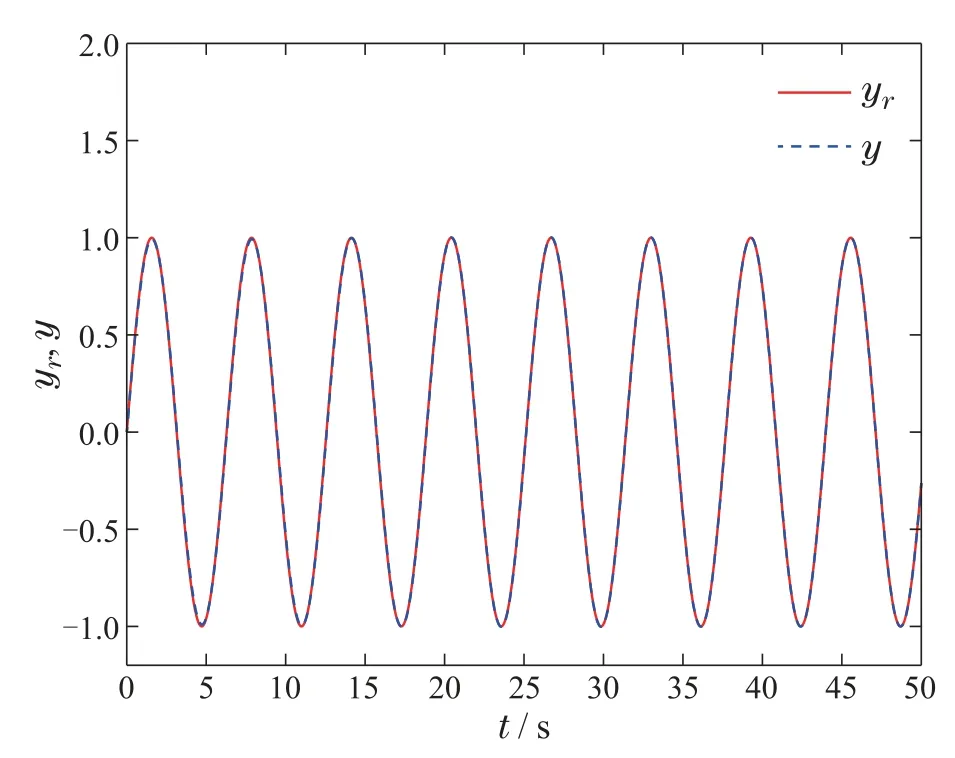
图1 系统输出y和期望轨迹yrFig.1 System output y and expected trajectory yr
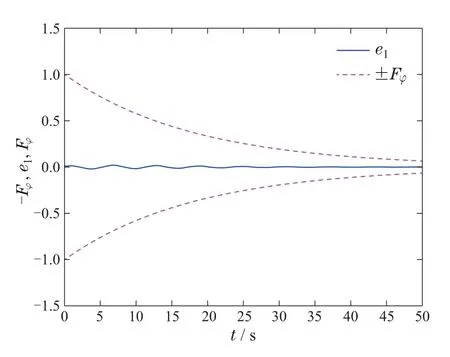
图2 跟踪误差e1与Funnel边界函数Fig.2 Sracking error e1 and Funnel boundary function
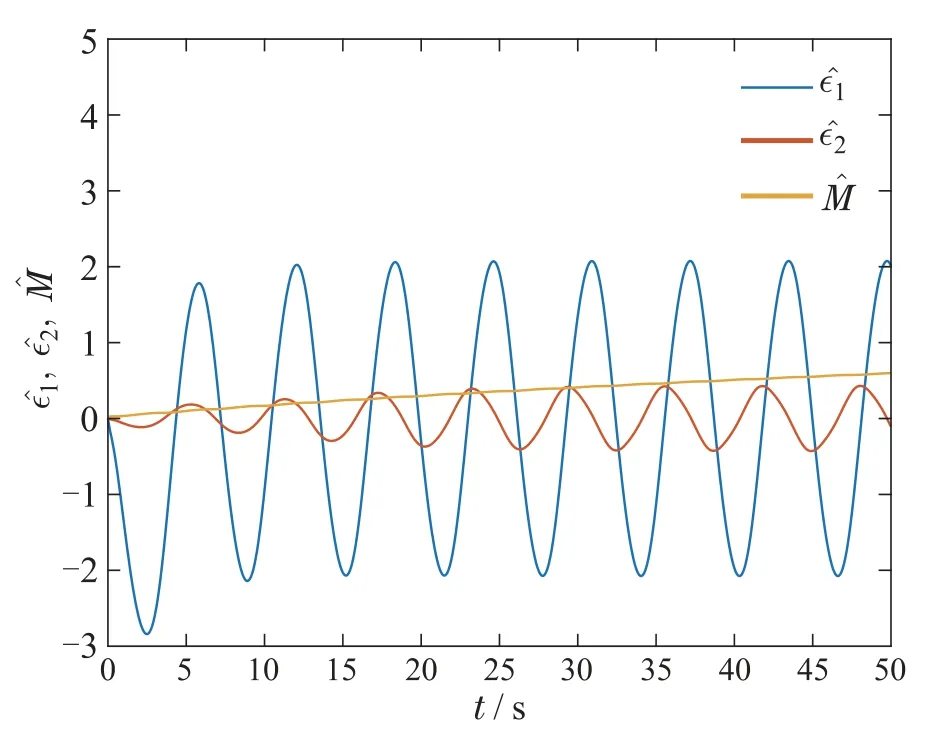
图3 神经网络误差和自适应律Fig.3 Neural network error and adaptive law
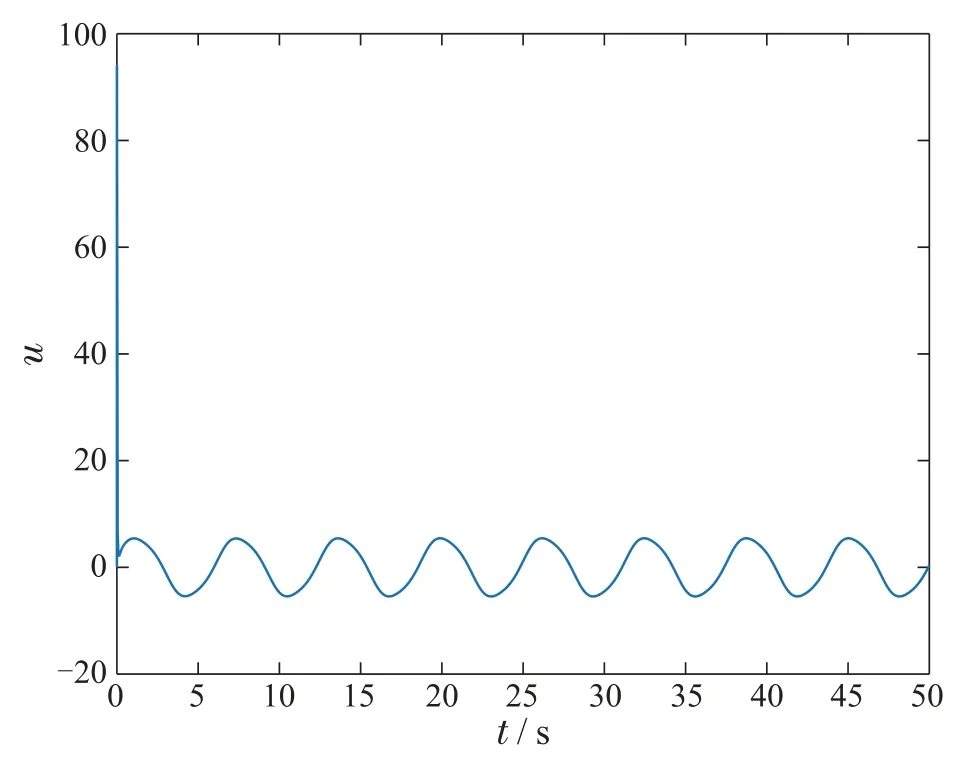
图4 控制信号uFig.4 Control signal u
6 结论
本文对带有输入时滞的不确定非线性系统提出了新型非线性动态面Funnel控制方案.首先,设计了输入时滞补偿动态变量将含有输入时滞的系统转换为无时滞系统,无需在递归控制的每步都补偿,优化了控制器设计过程,而且满足大时滞的要求.然后,利用Funnel函数,保证了系统的稳态和瞬态性能,且避免了预设性能给定边界函数的奇异性问题.最后,设计了基于正时变积分函数的非线性新型滤波器,既避免“微分爆炸”,又有效地消除了边界层误差,使得系统的跟踪误差渐近收敛到零.
猜你喜欢
烟台大学学报(自然科学与工程版)(2021年1期)2021-03-19
汕头大学学报(自然科学版)(2020年4期)2020-12-14
北京航空航天大学学报(2020年10期)2020-11-14
防爆电机(2020年3期)2020-11-06
大众投资指南(2020年10期)2020-07-24
北方工业大学学报(2019年5期)2019-03-30
上海师范大学学报·自然科学版(2018年3期)2018-05-14
北京航空航天大学学报(2017年8期)2017-12-20
北京航空航天大学学报(2017年9期)2017-12-18
人生十六七(2016年14期)2016-12-01