底座自适应式压电陶瓷激振装置研究
2022-11-07 02:48:56佘东生洪以平陈亚男田江平
机械科学与技术 2022年10期
佘东生,洪以平,陈亚男,田江平
(1.渤海大学 控制科学与工程学院,辽宁锦州 121013;2.大连理工大学 能源与动力学院,辽宁大连 116023)
微机电系统(Micro-electro-mechanical system, MEMS)在军事、国防、汽车、航空航天等很多领域都有了越来越广泛的应用,研究如何控制和改善微机电系统的可靠性、稳定性和使用寿命已经变得越来越重要[1-5]。微机电系统的这些性能指标与其内部核心部件的机械特性和材料特性息息相关,比如固有频率、品质因数、模态振型、弹性模量、残余应力、泊松比、热膨胀系数和弹性模量温度系数等,因此,针对上述特性参数开展测试研究具有非常重要的意义。
固有频率是微机电系统中核心可动部件的关键参数,精确地获取核心可动微结构的固有频率,一方面有助于评估器件的使用性能,另一方面也可以为进一步改进器件的设计细节提供重要的依据。由于核心可动微结构具有尺寸小、频率高等特点,准确测试其固有频率需要同时使用带宽高、非接触式的测振方法和激励方法。基于激光多普勒技术的测振方法具有带宽大、光学非接触和分辨率高等优点,已经被广泛的应用在MEMS微结构的动态特性测试当中,具备很好的测振效果[6-10];目前主流的非接触式激励方法是基于压电陶瓷(Piezoelectric ceramics, PZT)的底座激励方法,该方法在微结构的片外振动激励中被广泛地使用,但该方法在具体实现方式上仍存在一定的缺陷,亟待改进。
Burdess等[11]在所制作的微结构动态测试系统当中使用了单片式压电陶瓷圆片作为激励装置的核心激励部件,他们将压电陶瓷片粘接在一个弹性支承件的底部,将微结构安装在弹性支承件的顶部,形成底座激励装置,但这种单片式的压电陶瓷激励能力有限,所需的驱动电压也很高;Wang等[12]制作了一种基于压电陶瓷的底座激励装置,在该装置中使用了叠堆压电陶瓷进行驱动,压电陶瓷被安装在一个十字弹簧底座上,通过底座的隔振效应可以降低外部振动对测试结果的影响,不过这种设计方式同时也将底座结构的振动响应耦合进测试结果当中,增加了模态参数辨识的难度;Van等[13]制作了一种可应用在液体环境下的压电陶瓷底座激励装置,他们在压电陶瓷两端均安装了匹配质量块,在两个匹配质量块的配合下,可更容易调节激励装置的输出特性,不过这种底座激励装置更适合对频率较低的微结构进行激励,激振带宽不高,同时也没有考虑到压电陶瓷受到横向剪切力会被损坏的问题;佘东生等[14]制作了一种具有可动底座结构的压电陶瓷激励装置,对比其他基于压电陶瓷的底座激励装置,该装置在保证有效激励带宽的前提下,从一定程度上解决了叠堆压电陶瓷安装上所存在的问题,具备较好的适用性。不过该装置仍存在下列问题:可动底座结构中的钢球和上、下联接块之间均采用线接触方式进行配置,这会导致钢球无法平滑的转动,底座结构被卡死;十字弹簧片在工作过程中会出现较大的变形,导致安装于其上的微结构容易发生脱落。
综上,针对现有的基于压电陶瓷底座激励装置中所存在的缺陷,设计并制作一种可以解决叠堆压电陶瓷安装问题和微结构固定问题的底座激励装置,搭建面向MEMS微结构的动态特性测试系统,对激励装置的输出特性进行测试实验研究,并对多种尺寸微结构进行激振测试,获取微结构的动态特性参数。
1 基于压电陶瓷的底座激励装置
为了解决目前基于压电陶瓷的底座激励装置所存在的问题,设计了一种底座自适应式的压电陶瓷激励装置,如图1所示。
在激励装置中,顶板、套筒、底板和4根导向轴组成了激励装置的主体结构,起到安装和支撑的作用。4根导向轴呈圆周均布分布,在套筒的配合下,起到对可动底座结构的安装和调节作用。可动底座结构由下联接块、钢球和上联接块组成。其中,下联接块的4个延长臂分别安装在4根导向轴上,下联接块可以沿着导向轴上下移动,当移动到指定位置时,可以通过调节轴固定环上的锁紧螺钉进行固定;上联接块是一个正八棱柱的块装结构,在上联接块不相邻的4个侧棱面上圆周均布地安装了4个球头柱塞,4个球头柱塞顶部的钢球分别顶入到套筒内侧壁上圆周均布的4个矩形凹槽内,在上联接块的另外4个侧棱面上圆周均布的安装有4个调节杆,4个调节杆分别由套筒内侧壁上圆周均布的拱门形缺口伸出至套筒外侧,用于调节上联块在套筒内的位置;钢球被夹持在上联接块底部球面凹槽和下联接块顶部球面凹槽之间,上联接块底部球面凹槽的曲率半径和下联接块顶部球面凹槽的曲率半径均大于钢球的直径。设计这种可动底座结构的好处在于:当调节可动底座结构使安装于其顶部的压电陶瓷进入工作位置时,由于钢球和上联接块、下联接块之间均为点接触,压电陶瓷所承受的横向剪切力会被大幅减少,避免了压电陶瓷的损坏,并且使调节过程平滑流畅。
压电陶瓷顶部嵌入到一个安装盖内,通过安装盖可以实现与弹性支承件的充分接触。弹性支承件通过4个陶瓷垫片安装在圆环状的顶板上,弹性支承件上有4个圆周均布的“L”形支撑臂,微结构通过安装板安装在弹性支承件顶部中心区域。这样设计的好处在于:当压电陶瓷在垂直方向有位移输出时,弹性支承件的4个“L”形支撑臂随之产生形变,而在弹性支承件中心用于安装微结构的部分则不会产生较大的形变,因此微结构就不会因为胶体裂开而出现和弹性支承件分离的现象,解决了微结构安装可靠性的问题。
在使用激励装置对微结构进行激励时,首先沿导向轴向上滑动下联接块的延长臂,使可动底座结构推动压电陶瓷与弹性支承件相接触,在到达指定位置后锁紧轴固定环,使用外部激励电源对压电陶瓷施加冲击脉冲信号,可以实现对微结构的冲击激励。
2 微结构动态特性测试系统
所搭建的微结构动态特性测试系统主要由激光干涉测振单元和压电陶瓷激振单元组成,如图2所示。
2.1 激光干涉测振单元
激光干涉测振单元由德国POLYTEC的OFV-3001控制器、OFV-512光学头、研华的PCI-1712UL-AE数据采集卡和IPC-610L工业控制计算机组成。OFV-3001控制器可以实现1.5 MHz的测试带宽,OFV-512光学头的激光光斑直径最小可达到15 μm。在对微结构进行动态特性测试时,由OFV-512光学头发射的激光照射到微结构表面指定位置,将获取到的微结构振动响应信号送入到OFV-3001控制器中的位移解码器中进行解码,再经PCI-1712UL-AE数据采集卡传送到IPC-610L工业控制计算机当中,并由LabVIEW编写的数据采集程序进行保存。
2.2 压电陶瓷激振单元
压电陶瓷激振单元主要由压电陶瓷激振装置和压电陶瓷驱动电源组成。压电陶瓷激振装置根据前面的设计进行制作,其中,压电陶瓷为NanoMotions的PZ 150/7×7×7型叠堆压电陶瓷促动器,谐振频率为152 kHz,最大输出力为3 500 N;压电陶瓷驱动电源是以IRF9640大功率MOSFET管为核心元件制作而成,该MOSFET管的导通时间仅为60 ns,可以实现对压电陶瓷的快速充电,可在压电陶瓷两极间施加最大170 V的阶跃电压;在压电陶瓷驱动电源内还设计了放电回路,可以用来将压电陶瓷内的残余电荷释放掉,避免在下次测试时出现反向冲击电压。
3 测试实验
3.1 激振装置激振带宽测试
首先对压电陶瓷底座激励装置的动态输出性能进行了测试。在测试时,将OFV-512光学头发射的激光投射到弹性支承件顶部中心位置,再使用压电陶瓷电源在压电陶瓷两极间施加170 V的阶跃电压,由激光干涉测振单元获取激振装置的振动响应信号,测试结果如图3所示。
由图3可知,激振装置的输出响应脉冲上升时间Δt约为35 μs,最大输出位移为0.226 μm。激振装置的激励带宽BW与Δt成反比例关系,Δt越小则激振带宽越大。如果将激振脉冲等效为一个三角脉冲的话,则激振带宽可表示为[15]
(1)
根据式(1)可知,压电陶瓷底座激励装置的激励带宽约为90 kHz,具备良好的激振性能。
3.2 微结构动态特性测试
为了进一步测试激振装置的激振性能,采用所搭建的微结构动态特性测试系统对3种不同尺寸的单晶硅微悬臂梁的动态特性进行了测试。3种微悬臂梁的结构尺寸如图4所示,均为矩形结构,宽度均为500 μm,厚度均为10 μm,长度则各不相同,其中1#微悬臂梁长度为700 μm, 2#微悬臂梁长度为850 μm, 3#微悬臂梁长度为1 000 μm。
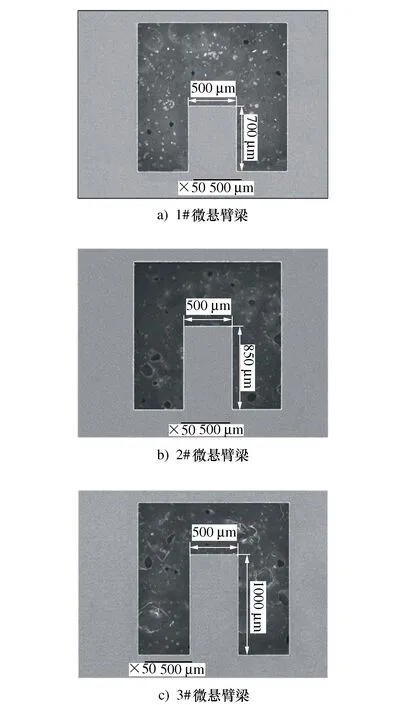
图4 微结构SEM图
使用Ansys Workbench软件对3种微悬臂梁的1阶模态进行了仿真分析,仿真时所使用的单晶硅弹性模量参考值[16]为167 GPa,泊松比为0.278,密度为2 330 kg/m3,仿真结果如图5所示。由图5可知,1#微悬臂梁1阶固有频率的仿真值为28.66 kHz,2#微悬臂梁1阶固有频率的仿真值为19.39 kHz,3#微悬臂梁1阶固有频率的仿真值为13.98 kHz,均在激励装置的激振带宽范围之内,可以被有效的激励起来。
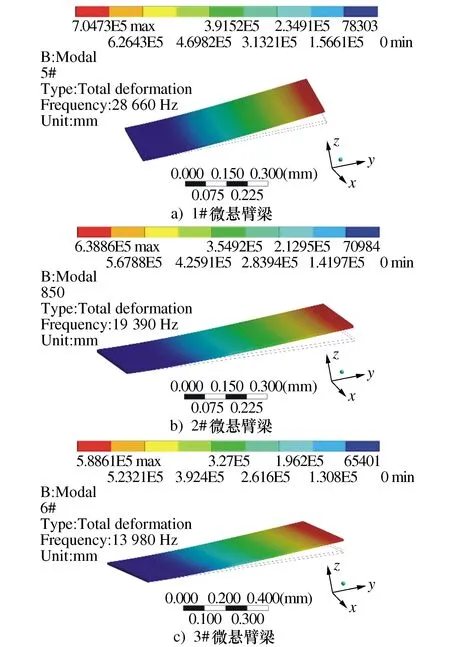
图5 微结构1阶模态仿真结果
分别对3种微悬臂梁的动态特性进行测试。使用压电陶瓷驱动电源在压电陶瓷两极间施加170 V的阶跃电压,驱动压电陶瓷实现对微悬臂梁的激励,同时采用激光干涉测振系统获取微悬臂梁自由端附近的振动响应,再将所获取的振动响应中微结构进入自由衰减阶段的部分信号进行FFT变换,获得3种微悬臂梁的1阶固有频率。所获得的3种微悬臂梁时域和频域响应信号如图6~图8所示。
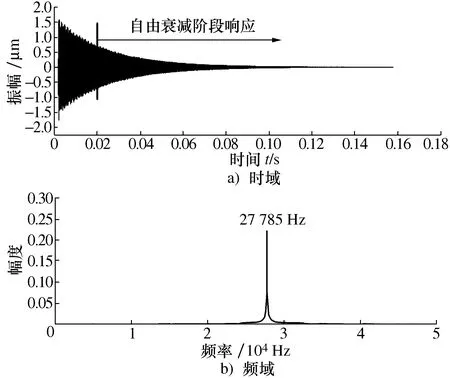
图6 1#微悬臂梁时频响应
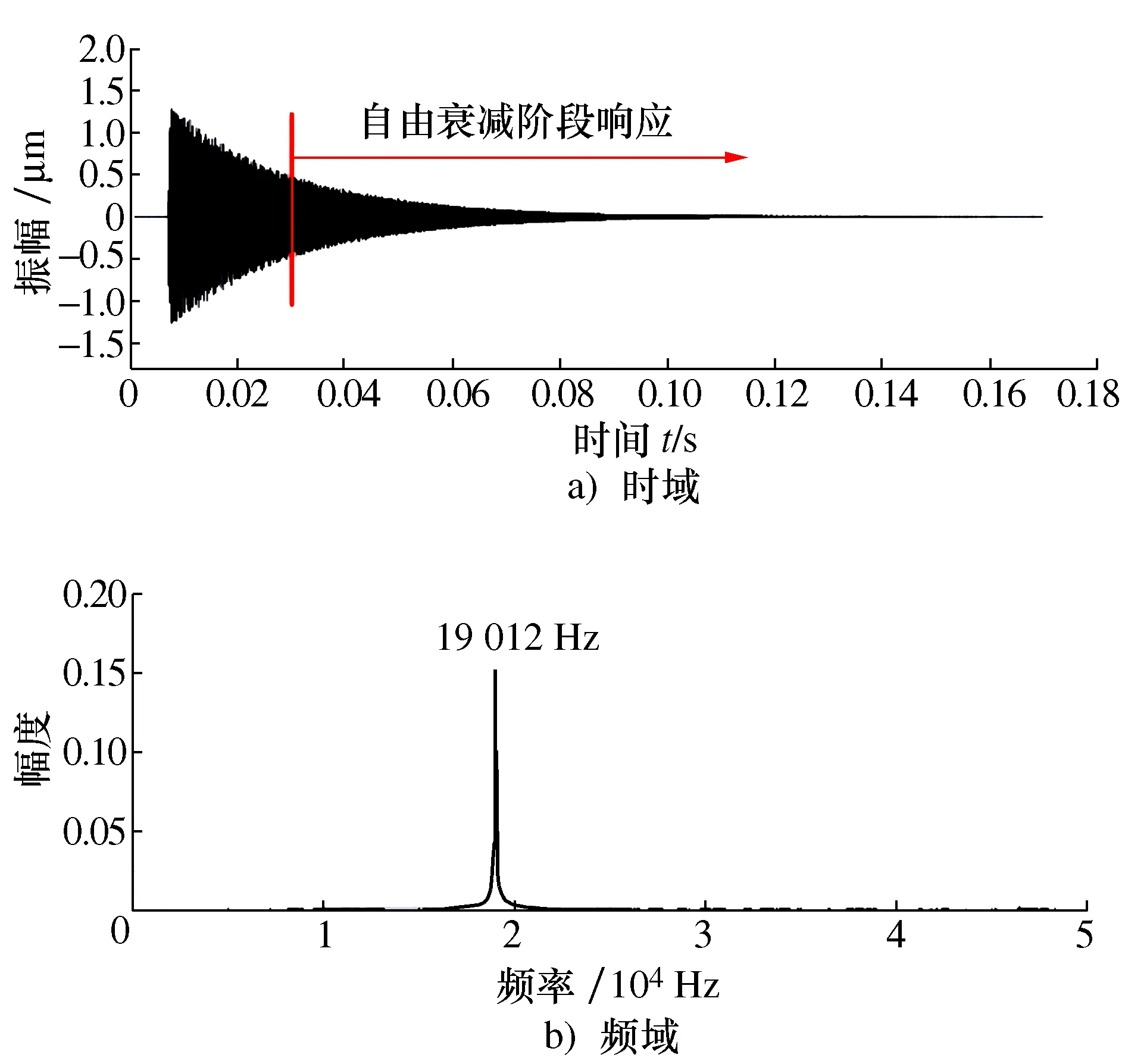
图7 2#微悬臂梁时频响应
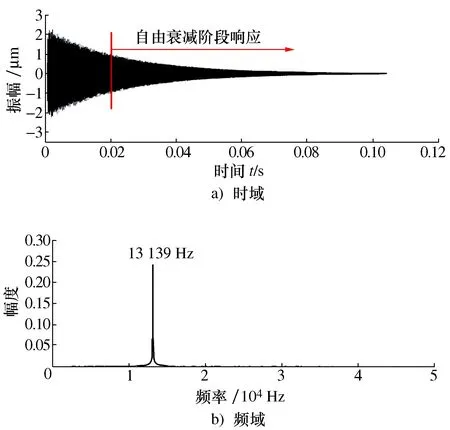
图8 3#微悬臂梁时频响应
由图6~图8可知,1#微悬臂梁的1阶固有频率为27.785 kHz,2#微悬臂梁的1阶固有频率为19.012 kHz,3#微悬臂梁的1阶固有频率为13.139 kHz。微悬臂梁的1阶固有频率随着长度的增大而减小,且每两个微悬臂梁固有频率的比值近似地反比于它们长度平方的比值,这与悬臂梁弯曲振动的经典理论是相吻合的。
为了获得微悬臂梁自由衰减振动的阻尼比,如图9所示,首先分别截取1#微悬臂梁0.02~0.18 s的自由衰减振动响应,2#微悬臂梁0.03~0.18 s的自由衰减振动响应,以及3#微悬臂梁0.02~0.18 s的自由衰减振动响应,采用Savitzky-Golay滤波器进行平滑处理,然后对平滑处理后响应信号的峰值进行非线性拟合,得到每个微悬臂梁振幅峰值的Ring Down衰减曲线。利用该曲线并使用式(2)可获得3种微悬臂梁的阻尼比[15]。
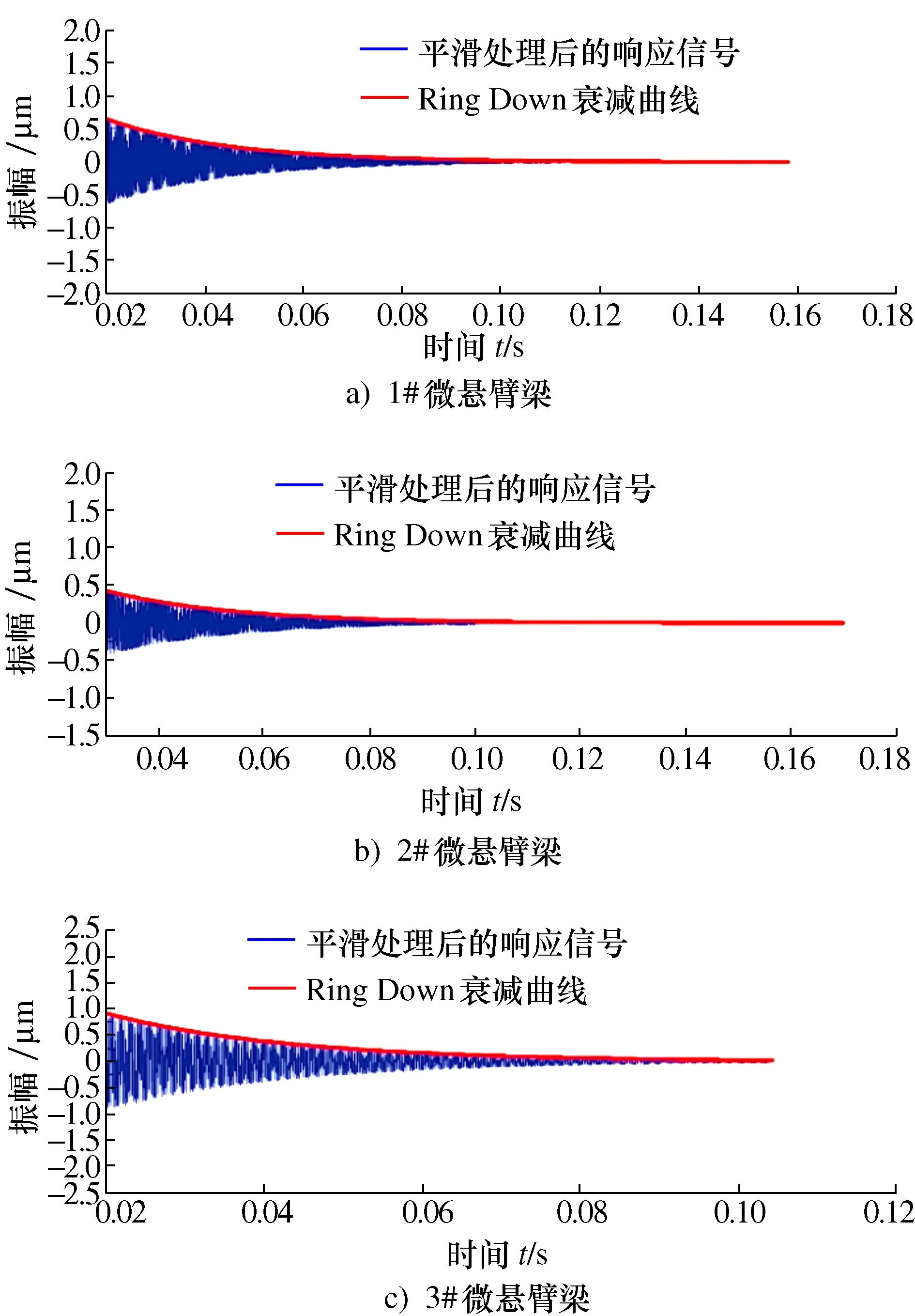
图9 自由衰减振幅拟合曲线

(2)
式中:ζ为微悬臂梁自由衰减振动的阻尼比;T为微悬臂梁自由衰减振动的周期;x1和x2分别为Ring Down衰减曲线上任意两点对应的时间值,且x1 由图6~图8可得1#微悬臂梁自由衰减振动的周期为36 μs, 2#微悬臂梁为52.6 μs,3#微悬臂梁为76.1 μs;3个微悬臂梁的x1值均选取为0.04 s,x2值均选取为0.06 s,y1和y2则根据各微悬臂对应的Ring Down衰减曲线分别进行取值;经计算可得,1#微悬臂梁的阻尼比为0.002 7,2#微悬臂梁的阻尼比为0.003 5,3#微悬臂梁的阻尼比为0.003 1。可以看出3种微悬臂梁的阻尼比均非常小,可以忽略不记,因此,由微悬臂梁自由衰减阶段的信号进行FFT变换所获得的有阻尼固有频率可以被当作其无阻尼固有频率进行分析和讨论。 通过动态特性测试实验所获得的微悬臂梁固有频率与仿真结果存在一定的差异,该差异一方面来源于于测试系统误差和随机误差,另一方面来源于由微加工工艺所导致的微悬臂梁结构尺寸和材料参数与仿真时的参考值之间的差异,比如微悬臂梁的长度、宽度、厚度、单晶硅材料的弹性模量和密度等。 本文设计了一种底座自适应式的压电陶瓷激励装置,搭建了微结构动态特性测试系统,通过对微结构动态输出特性和微结构动态特性的测试实验,得出如下结论: 1)在激励装置中,采用下联接块、钢球和上联接块组成的可动底座结构可以解决叠堆压电陶瓷在安装时承受较大横向剪切力的问题,避免了压电陶瓷的损坏,并且使调节过程平滑流畅; 2)在激励装置中,弹性支承件具有4个L形支撑臂,可以使弹性支承件上安装微结构的区域不会出现较大形变,能够解决微结构安装可靠性的问题; 3)激励装置的激励带宽约为90 kHz,能够有效激励起固有频率位于该带宽范围内的微结构,具备良好的激振能力。4 结论
猜你喜欢
舰船科学技术(2022年21期)2022-12-12 08:08:34
中学生数理化·八年级物理人教版(2019年4期)2019-05-20 10:02:36
压电与声光(2019年1期)2019-02-22 09:46:06
装备制造技术(2018年10期)2018-12-24 02:24:46
铜仁学院学报(2018年6期)2018-07-05 09:47:40
电镀与环保(2016年2期)2017-01-20 08:15:22
光学精密工程(2016年5期)2016-11-07 09:06:26
邢台学院学报(2016年4期)2016-02-28 19:54:42
发明与创新(2015年26期)2015-02-27 10:39:31
振动、测试与诊断(2014年6期)2014-03-01 01:14:55