
基于挠性圆盘的甘薯裸苗类水平栽植运动分析与试验
2022-11-07 03:20何宇凡颜丙新祝清震武广伟
中国农业大学学报 2022年11期
何宇凡 丛 岳 颜丙新 祝清震 武广伟*
(1.江苏大学 农业工程学院,江苏 镇江 212013; 2.北京市农林科学院智能装备技术研究中心,北京 100097)
甘薯是一种抗旱、耐贫瘠、增产潜力较大的作物,属于劳动密集型作物。目前我国甘薯移栽以高剪苗(或拔苗)等裸苗栽植为主,栽植方法有斜栽法、水平栽法、直栽法、船底形栽法等几种,水平栽法在产量与商品率上均优于甘薯直栽。
目前对于秧苗栽植过程的研究主要以秧苗直立栽植状态为主,已有研究对挠性圆盘式移栽机的分析中提出圆盘栽植的行走速比系数λ
=1是秧苗前倾与后倾的“分水岭”,λ
=1时可获得较高的栽植直立度合格率,通过对链夹式移栽机栽植过程的运动分析,对投苗角度与立苗率的关系进行了研究,表明提前释放秧苗会提高秧苗栽植的直立率。甘薯种植农艺对秧苗的栽植入土的形态要求较高,目前对于甘薯栽植过程研究主要分为:1)对夹苗爪等主动夹持移栽机构实现类船底形栽法的运动轨迹进行研究分析;2)基于挠性圆盘和链夹式移栽器开展秧苗直立栽植运动分析,通过调整行走速比系数和释放角实现秧苗后倾入土倾斜栽植。基于挠性圆盘对甘薯裸苗实现类水平栽植的相关研究分析较少。本研究拟采用构建裸苗触地弯曲与苗根运动的数学模型对甘薯裸苗栽植过程进行运动学分析的方法,分析裸苗弯曲朝向的影响因素与裸苗根部触地后的运动轨迹,利用台架试验与EDEM软件仿真试验的方式对模型合理性进行验证,并通过田间试验对栽植效果进行验证,以期为甘薯裸苗栽植机械的设计和优化提供参考。
1 甘薯裸苗自动喂苗栽植装置结构与工作原理
1.1 喂苗栽植装置结构及工作过程
甘薯裸苗自动喂苗栽植装置由喂苗装置与栽植装置组成(图1)。喂苗装置主要由苗带、喂苗装置支架、喂苗电机、导向装置、卷苗带轮等组成。栽植装置由挠性圆盘、栽植装置支架、栽植电机与压板等组成。

1.苗带;2.喂苗电机;3.喂苗装置支架;4.导向装置;5.卷苗带轮;6.甘薯裸苗;7.挠性圆盘;8.栽植电机;9.栽植装置支架;10.压板 1.Seedling belt; 2.Feeding motor; 3.Support frame of the seedling feeding device; 4.Guiding device; 5.Shaft wheel; 6.Sweet potato naked seedlings; 7.Flexible discs; 8.Planting motor; 9.Support frame of the planting device; 10.Press plate图1 喂苗栽植装置结构Fig.1 Structure of the feeding plantation device
该装置基于预处理苗带与双电机驱动相结合的方式,采用挠性圆盘实现自动喂苗与定株距栽植。工作时将预处理苗带安装在喂苗装置上,喂苗电机驱动苗带下方两卷苗带轮分别向相反方向旋转卷起苗带。裸苗在导向装置的引导下随苗带向下做纵向运动,达到夹持点后脱离苗带被挠性圆盘夹持,完成喂苗动作。挠性圆盘在栽植电机的驱动下夹持裸苗向地面旋转,当裸苗到达挠性圆盘的释放点时释放裸苗,完成栽植动作。
1.2 挠性圆盘类水平栽植工作原理
挠性圆盘在压板作用下确保在旋转过程中保持旋转方向上夹持点至释放点之间两挠性圆盘贴合,之间区域即为夹持区,夹持区角度即为夹持角β
。而旋转方向上释放点至夹持点之间两挠性圆盘相隔一定间距。在裸苗栽植过程(图2)中,首先由开沟器开好苗沟,挠性圆盘在夹持点夹持裸苗后带动裸苗向下旋转,开沟器的中空结构使得裸苗可从开沟器中间通过。裸苗转动至释放点前苗根已与地面接触并发生弯曲,圆盘继续转动至释放点时部分裸苗水平躺在沟底,此时圆盘将裸苗释放,开沟器后部设有土壤回流口,土壤自动回流形成覆土,镇压轮加速土壤回流并压实土壤,完成甘薯裸苗类水平栽植作业。
1.甘薯裸苗;2.开沟器;3.土壤;4.挠性圆盘;5.镇压轮;6. 土壤回流口 1.Sweet potato naked seedlings; 2.Furrow opener; 3.Soil; 4.Flexible disc; 5.Repression wheel; 6.Soil backflow port vC,挠性圆盘和甘薯裸苗的前进速度,图4、图8和图10同义;vB,苗带送苗速度;LB,裸苗固定间距;ω,挠性圆盘和甘薯裸苗转动的角速度,图4~6、图8~10同。 vC, the forward speed of the flexible disc and naked sweet potato seedlings, same as in Figs.4, 8 and 10; vB, the seedling belt delivery speed; LB, the fixed spacing of naked seedlings; ω, the angular speed of rotation of the flexible disc and naked sweet potato seedlings, same as in Figs.4-6, Figs.8-10.图2 挠性圆盘类水平栽植工作原理Fig.2 Working principle of flexible disc similar horizontal planting
甘薯使用水平栽植法栽植时,土下部分基本处于同一深度,土壤墒情一致,结薯大小一致,商品率高。考虑到甘薯主要依靠结节产薯,一般结节之间的距离为30~40 mm,产薯结节以2~3个为佳;且甘薯需要适当浅栽,上面覆盖5~7 cm土为佳,一般不超过8 cm。本研究提出一种适用于挠性圆盘的类水平栽植方法,具体栽植姿态(图3)要求如下:裸苗露出土壤部分不能被土壤埋住,根部最低点与垄面垂直距离为栽植深度,栽植深度不超过8 cm的同时不小于5 cm,根部最低点所处水平线即为类水平栽植区的下边界线,下边界线与上边界线之间高度为类水平栽植区高度,本研究类水平栽植区高度设为2 cm,处于类水平栽植区内的甘薯裸苗长度则为类水平栽植长度,类水平栽植长度超过8 cm即为合格的类水平栽植。
为达到本研究中对于栽植姿态的要求,挠性圆盘外裸苗长度需大于12 cm,目前常用的甘薯裸苗长度为25~30 cm,为保证挠性圆盘可以稳定夹持甘薯裸苗,圆盘外的裸苗长度应不超过20 cm。挠性圆盘旋转半径R
=28 cm,当圆盘露出裸苗的长度L
=15 cm,挠性圆盘旋转中心距沟底的高度H
=35 cm时,裸苗旋转至最低点触地弯曲后满足类水平栽植姿态要求,进一步加长L
或者降低H
可能达到更佳栽植效果,但增大了苗的折断与掉落的风险,因此本研究中圆盘露出裸苗的长度L
=15 cm,挠性圆盘旋转中心距沟底的高度H
=35 cm。
1.上边界线;2.下边界线 1.Upper boundary line; 2.lower boundary line HD,栽植深度;HS,类水平栽植区高度;LS,类水平栽植长度。 HD, the planting depth; HS, the height of the similar horizontal planting area; LS, the length of the similar horizontal planting.图3 类水平栽植效果示意图Fig.3 Schematic diagram of class horizontal planting
2 甘薯裸苗栽植过程运动学分析
2.1 甘薯裸苗触地弯曲朝向分析
在机具前进过程中,挠性圆盘夹持裸苗旋转至触地后,理论上裸苗会发生2种朝向的弯曲:向前弯曲和向后弯曲。为找出影响弯曲朝向的因素,构建裸苗触地弯曲模型对触地瞬间的裸苗根部进行速度分析(图4)。
假设裸苗刚触地时所处直线与挠性圆盘的直径重合,此时苗根处具有2个速度:机具的前进速度v
与线速度v
,其中v
在水平方向分速度v
为:v
=ω
(R
+L
)cosθ
(1)
(2)
v
=ωH
(3)

A,裸苗与地面的初始接触点;D,裸苗刚触地时刻圆盘边缘的夹苗点。θ,裸苗首次触地时裸苗所在直线与铅垂线的夹角;vR,甘薯裸苗由于随挠性圆盘旋转产生的线速度;vx,线速度在水平方向分速度。图5、图6和图10同。 Point A, the initial point of contact of naked seedlings with the ground;Point D, the point at the edge of the disc where the naked seedlings first touch the ground. θ, the angle between the straight line and the plumb line when the naked seedling touches the ground for the first time; vR, the linear velocity of the sweet potato seedling due to the rotation of the flexible disc; vx, the linear velocity in the horizontal direction. Same as in Figs.5, 6 and 10.图4 裸苗触地时刻根部速度图Fig.4 Root velocity diagram of naked seedling at touchdown time
式中:ω
为挠性圆盘和裸苗转动的角速度,rad/s;θ
为苗根首次触地时裸苗所在直线与铅垂线的夹角,rad;R
为挠性圆盘旋转半径,m;L
为甘薯裸苗露出挠性圆盘的长度,m;H
为挠性圆盘夹持裸苗时圆盘外裸苗的长度,m。1)当v
>v
,即ω
>v
/H
时,苗根水平方向合速度向后,有向后运动趋势,会受到水平向前的摩擦力,苗根在外力作用下会向前弯曲。2)当v
<v
,即ω
<v
/H
时,苗根水平方向合速度向前,有向前运动趋势,会受到水平向后的摩擦力,苗根在外力作用下会向后弯曲。理想状态下,机具前进速度与角速度两者关系决定了甘薯裸苗触地瞬间的弯曲朝向,2种弯曲朝向的临界转速ω
=v
/H
。2.2 不同弯曲朝向的适用条件分析
在实际生产中,挠性圆盘栽植株距Z
受到许多因素的影响,其中喂苗装置的喂苗频率f
和机具速度v
是2个最主要的影响因素,而喂苗频率则由送苗速度v
、裸苗固定间距L
决定,其中:(4)
本研究中的自动喂苗栽植装置由电机提供动力,转速可调节。为保证株距固定,探讨以机具速度相同为前提。挠性圆盘理论上在其夹持角β
内可以夹持密排的裸苗,但考虑到裸苗枝叶之间互相缠绕会影响裸苗释放,为保证释放效果,同一时刻挠性圆盘夹持裸苗数量存在上限N
。挠性圆盘旋转的角速度ω
与送苗频率f
应满足:(5)
式中,β
为挠性圆盘夹持区的角度,rad。当角速度ω
同时满足ω
>v
β/ZN
和ω
>v
/H
这2个条件时,裸苗触地后向前弯曲;当角速度ω
满足v
β/ZN
<ω
<v
/H
时,裸苗触地后向后弯曲。从适用条件角度出发,本研究选择向前弯曲进行进一步研究。2.3 甘薯裸苗苗根运动轨迹分析
以圆盘为参照物,挠性圆盘在甘薯裸苗触地后夹持裸苗继续转动,此时裸苗弯曲姿态类似圆弧型(图5),裸苗苗根的准确位置难以确定,为方便计算,将裸苗视为由两段刚体组合而成的刚体苗,两段刚体的重合点为圆盘边缘的夹苗点D
,裸苗根部刚与地面接触时的苗根位置为A
,圆盘夹苗点选转至D
′后,真实裸苗的触地点移动至E
,而刚体苗的触地点为E
′,其中AD
=E
′D
′。
D′,挠性圆盘旋转一定角度后圆盘边缘夹苗点;E,裸苗旋转一定角度后根部实际触地点;E′,刚体苗旋转一定角度后根部的触地点;O,挠性圆盘旋转中心;K,旋转中心O到地面AK的垂足。图6同。 Point D′, the point at the edge of the disc where the seedling is clamped after rotation at an angle; Point E, the point of actual contact of the roots of a naked seedling after rotation at an angle; Point E′, the point of contact of a rigid body after rotation at an angle; Point O, the center of rotation of flexible disc; Point K, the vertical foot from the center of rotation O to the AK. Same asFig.6. 图5 裸苗触地弯曲姿态Fig.5 Bending posture of naked seedlings touching the ground
圆盘夹持部分的刚体苗所在的圆盘直径OD
′延长后与地面AK
相交于G
(图6),其中D
′G
=L
′,D
′F
⊥AK
于F
,则:(R
+L
′)cos(θ
-ω
t
)=H
(6)
(7)
式中,t
为圆盘旋转的时间,s。刚体苗触地点与旋转中心之间的水平距离为X
′,由于X
′=FK
+E
′F
,结合式(6)和(7),X
′与t
之间的函数关系式为:R
sin(θ
-ω
t
)(8)
以机具前进方向为正方向,以触地瞬间刚体苗苗根位置为坐标原点,则在前进方向上,刚体苗触地点水平方向移动距离与时间的函数关系为:
h
(t
)=v
t
+f
(t
)-X
(9)
式中,X
为刚体苗刚触地时苗根距旋转中心的水平距离,m。对式(9)求导,发现当t
趋于0时,h
(t
)的导函数值大于零,即刚体苗触地后苗根总是先向前进方向移动一段距离,由于刚触地时刚体苗触地点与裸苗真实触地点之间相差不大,这也说明当裸苗触地向前弯曲时,苗根会在触地后先向前移动一段距离,发生送苗现象,这种现象可能对裸苗造成一定损伤,需要寻找合适的圆盘旋转角速度以减少裸苗触地后向前移动的距离和时间。
G,OD′延长线与地面AK交点;F,D′到地面AK的垂足。 t,旋转时长;R,挠性圆盘旋转半径;L,挠性圆盘露出的苗长;H,圆盘旋转中心至地面距离。 Point G, the point of intersection of the extension of OD′ with the AK; Point F, the vertical foot of D′ to the AK. t, the time of rotation; R, the radius of rotation of the flexible disc; L, the length of seedling exposed by flexing disc; H, the distance from the center of rotation of the disc to the ground.图6 旋转过程中刚体苗触地点变化示意Fig.6 Indication of contact point change of rigid seedling during rotation
3 甘薯裸苗触地弯曲朝向台架试验
搭建室内试验台架(图7),进行裸苗触地弯曲朝向试验。该台架整体由铝合金型材搭建,将喂苗装置与栽植装置分别安装在台架上并调整好位置,控制器可根据需求控制两电机转速。台架还配备由变频电机驱动,同时转速可调节的输送带用以模拟地面。
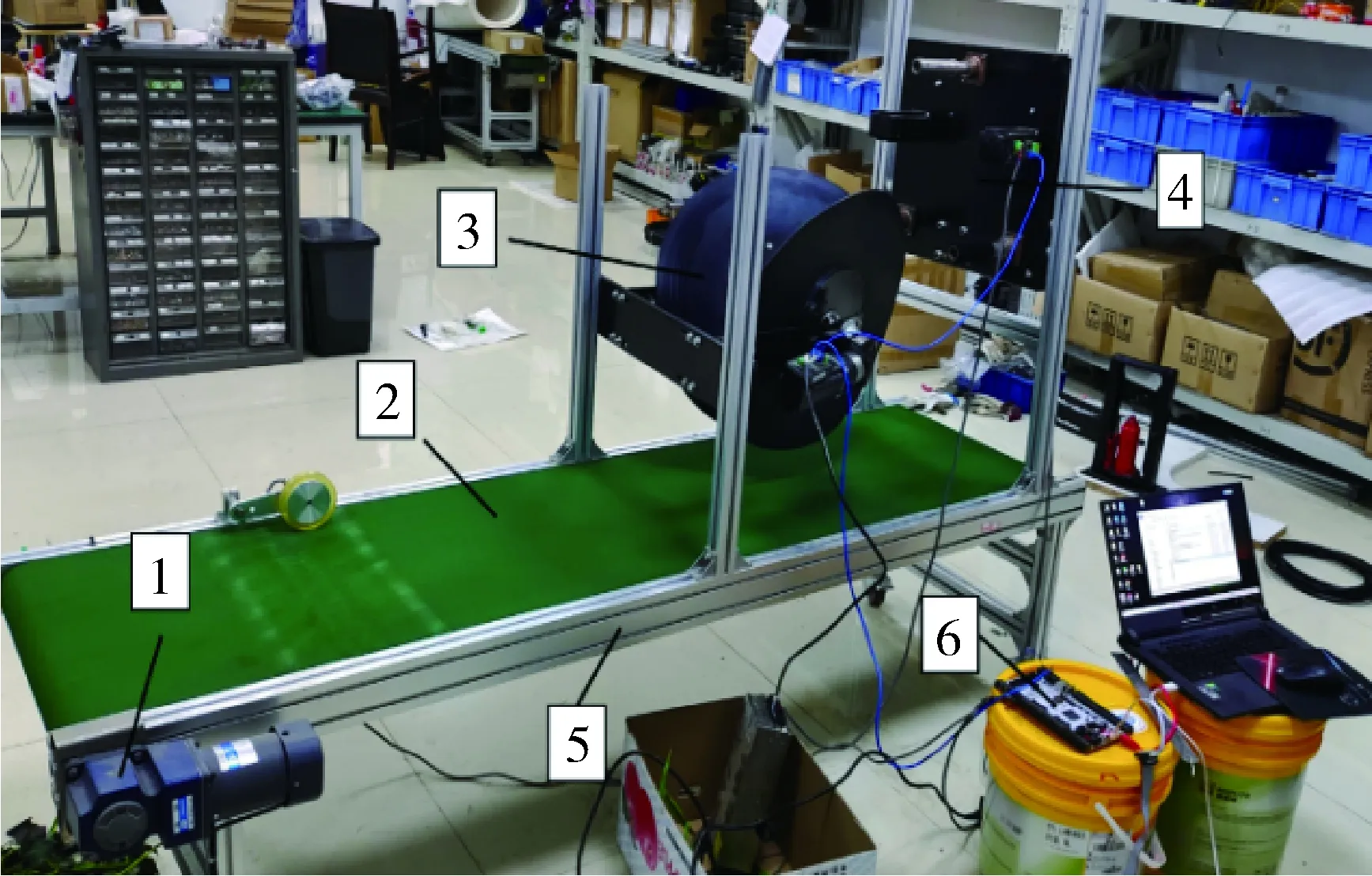
1.变频电机;2.输送带;3.栽植装置;4.喂苗装置;5.铝合金支架;6.控制器 1.Inverter motor; 2.Conveyor belt; 3.Planting device; 4.Seedling feeding device; 5.Aluminum alloy bracket; 6.Controller图7 裸苗触地弯曲朝向试验台架Fig.7 Test bench in bending orientation test of naked seedling on touching ground
选取‘西瓜红’甘薯裸苗,长度为25~30 cm,满足试验需求。经前期研究,喂苗装置的喂苗频率为1株/s时,株距变异系数小于10%,甘薯裸苗种植的标准株距为25 cm,根据式(4)设置传送带运动速度为0.25 m/s,此时甘薯裸苗触地临界转速为0.71 rad/s。理论上小于该临界转速时裸苗会向后弯曲,大于该临界转速时裸苗会向前弯曲。分别设置挠性圆盘旋转角速度ω
=0.2、0.4、0.6、0.8、1.0、1.2、1.4和1.6 rad/s。使用50颗裸苗依次水平喂入栽植圆盘,保证夹持后露出圆盘的裸苗长度为15 cm,由摄像设备拍摄裸苗触地后弯曲姿态见图8。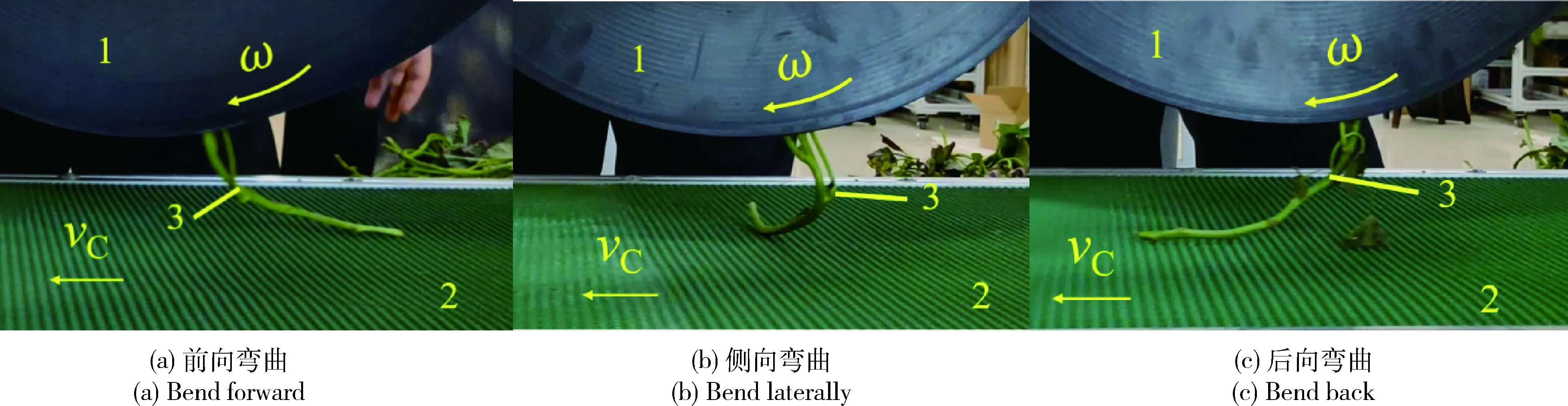
1.挠性圆盘;2.传送带;3.甘薯裸苗 1.Flexible disc; 2.Conveyor belt; 3.Sweet potato naked seedling图8 裸苗触地后的弯曲姿态Fig.8 Bent posture after the naked seedling touches the ground
裸苗触地后的弯曲情况可以分为3种: 1)旋转至最低点时,裸苗大部分处于圆盘平面,苗根位于夹持点前方,记为符合向前弯曲(图8(a));2)旋转至最低点时,裸苗大部分处于圆盘平面,苗根位于夹持点后方,记为符合向后弯曲(图8(c));3)旋转至最低点时,苗根处于夹持点侧面,记为不符合(图8(b));统计各转速下符合理论弯曲朝向的株数,最终结果见表1。可知,当挠性圆盘旋转角速度ω
=0.2 rad/s或ω
≥1.4 rad/s时,甘薯裸苗实际弯曲姿态与理论弯曲姿态符合均能达到98%。当夹持角为π/
2,根据式(5)可知,转速为0.2 rad/s时,圆盘在其夹持角内需要同时夹持8根裸苗,这种夹持密度会严重影响裸苗释放;在转速为1.4 rad/s时,圆盘在其夹持角内需要同时夹持1颗裸苗,这种夹持密度可以保证裸苗释放时不会相互影响。表1 不同旋转角速度下裸苗触地实际弯曲朝向与理论弯曲朝向符合率
Table 1 Coincidence rate between the actual bending orientation and theoretical bending orientation of naked seedlings touching the ground at different rotational speeds
旋转角速度/(rad/s)Rotational angularvelocity理论弯曲朝向Theoretical bendingorientation总喂入数Total numberof feeding符合理论数Number ofqualified符合率/%Coincidencerate0.2向后5049980.4向后5043860.6向后5037740.8向前5025501.0向前5041821.2向前5046921.4向前5049981.6向前504998
4 基于EDEM的甘薯裸苗触地送苗仿真试验
4.1 甘薯裸苗模型的建立
利用EDEM自带的Hertz-Mindlin with jkr 模型建立甘薯裸苗柔性体模型,由于裸苗触地弯曲部分无枝叶,在不影响仿真效果的情况下,降低建模难度,将甘薯裸苗模型建立成由半径为0.8 mm的球形颗粒通过颗粒表面jkr能粘结而成的直径 4 mm、长 250 mm的细长圆柱形。一个长度为100 mm的圆筒固定住模型的一端,用以替代挠性圆盘。圆筒与甘薯之间摩擦因数设置为1以防止模型在运动过程中从圆筒中脱落,在下方设置一个平面视为地面,具体参数见表2。
当圆筒以一定角速度旋转时,甘薯裸苗模型随圆筒旋转且未从圆筒脱离,当模型与地面板接触时发生了明显的变形(图9),说明甘薯裸苗模型可以一定程度反映真实甘薯裸苗触地后的运动状态。
表2 甘薯裸苗触地送苗仿真试验仿真参数
Table 2 Simulation parameters of the simulation experiment of sweet potato naked seedlings touching the ground
项目Item参数Parameter数值Value项目Item参数Parameter数值Value甘薯Sweetpotato圆筒Cylinder地面板Ground密度/(kg/m2) Solids density1 152剪切模量/Pa Shear modulus1.18×107泊松比 Poisson’s ratio0.30密度/(kg/m2) Solids density7 801剪切模量/Pa Shear modulus2.07×1011泊松比 Poisson’s ratio0.29密度/(kg/m2) Solids density2 610剪切模量/Pa Shear modulus1.09×106泊松比 Poisson’s ratio0.40圆筒与甘薯Cylinder withsweet potato地面与甘薯Ground withsweet potato恢复系数 Coefficient of restitution0.40动摩擦因数 Coefficient rolling friction1.00静摩擦因数 Coefficient static friction1.00恢复系数 Coefficient of restitution0.50动摩擦因数 Coefficient rolling friction0.83静摩擦因数 Coefficient static friction0.70
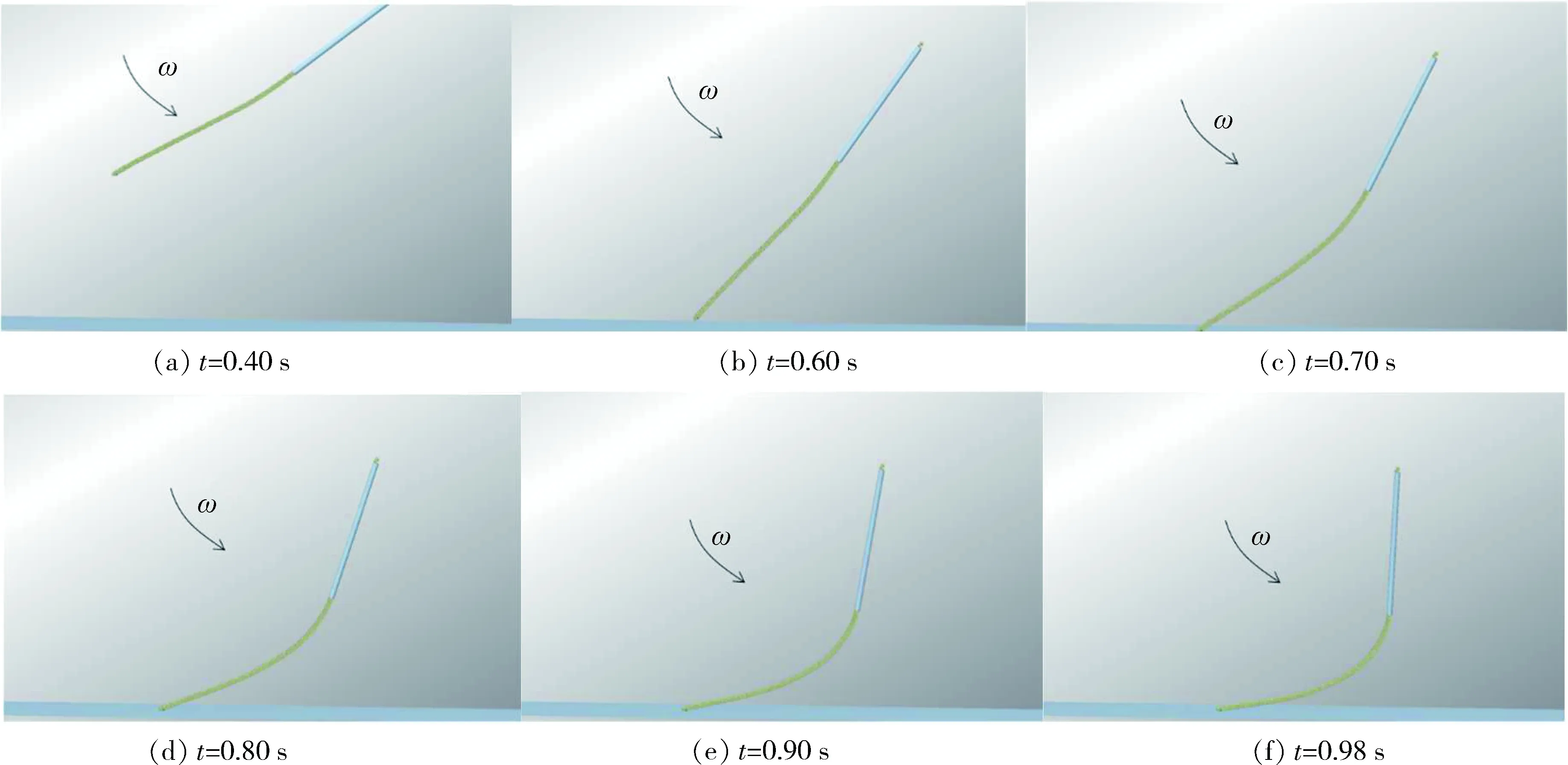
t为旋转时长。t, the time of rotation.图9 不同时刻甘薯裸苗模型弯曲状态Fig.9 Simulated bending state of potato seedlings at different times
4.2 甘薯裸苗触地送苗仿真试验
甘薯裸苗前进速度为0.25 m/s,转动角速度分别为0.8、1.0、1.2、1.4和1.6 rad/s进行甘薯裸苗触地送苗仿真试验,仿真时间为裸苗由喂苗点旋转至释放点所需时间。不同转速下甘薯裸苗模型最底部的单个颗粒的运动轨迹如图10。
不同角速度下,甘薯裸苗模型最底部颗粒的运动轨迹都可分为3个阶段:第一阶段为由喂入点开始旋转至裸苗模型与地面板发生接触;第二阶段为模型与地面板接触后,根部向前移动至最前点,其水平方向移动距离即为前移距离,本阶段时长即为前移时长;第三阶段为模型根部向后移动,直至仿真结束。第二阶段与第三阶段的总时长即为触地时长,将前移时长占触地时长的比值记作时占比,不同旋转角速度下的裸苗模型最底部颗粒运动轨迹参数结果见表3:不同的圆盘旋转角速度下,苗根触地后总会先向前移动一段距离,与理论分析一致。但是随着角速度的增大,前移距离与时占比都在减少,当角速度为1.2 rad/s时,向前距离在10 mm左右,此时可以认为送苗现象对甘薯裸苗影响不大。结合裸苗触地弯曲试验,在机具速度为0.25 m/s的情况下,选用1.4 rad/s的圆盘转速进行田间试验。

B,甘薯裸苗模型向前运动至最前点时模型最底部颗粒的位置;C,仿真结束时模型最底部颗粒的位置。 Point B, the position of the bottom particle of sweet potato naked seedling model when it moves forward to the front point; Point C, the position of the bottom particle of the model at the end of simulation.图10 不同转速下甘薯裸苗模型最底部颗粒运动轨迹Fig.10 Movement trajectory of the particle at the bottom of the sweet potato naked seedling model at different speeds
表3 不同旋转角速度下裸苗模型底部颗粒运动轨迹参数
Table 3 Motion trajectory parameters of particles at the bottom of the naked seedling model under different rotational angular velocities
旋转角速度/(rad/s)Rotational angularvelocity前移距离/mmThe distance ofmoving forward前移时长/sThe time of movingforward触地时长/sThe time of touchingthe ground时占比/%Time proportion0.846.260.710.7298.611.014.050.260.5450.001.210.730.150.4831.251.47.290.090.4221.431.64.390.060.3616.67
5 田间试验
田间试验在北京昌平区小汤山国家精准农业示范基地试验田进行。试验田土质为粘壤土,土壤含水率为8%~10%,试验土地在栽植前进行多次旋耕,土壤细碎无明显的大块土壤,满足起垄标准。试验机具为以自动喂苗栽植装置为核心的甘薯裸苗自动喂苗栽植试验平台。选择带有爬行档功能的DF554拖拉机带动试验平台工作,车辆前进速度为0.25 m/s。试验对象为“西瓜红”甘薯裸苗,一共挑选90株甘薯裸苗,长度为25~30 cm,适合甘薯裸苗机械化栽植。试验前将甘薯裸苗按照15 cm的间距均匀固定在5 m长的预处理苗带上,裸苗根部露出苗带长度一致,保证挠性圆盘夹持裸苗时,裸苗露出圆盘长度为15 cm,每卷苗带固定30株甘薯裸苗,一共制作3卷苗带。
每次试验使用1卷苗带,启动拖拉机向前行进,待到车速平稳在后启动喂苗栽植装置进行作业,喂苗装置喂苗频率为1株/s,挠性圆盘转速为1.4 rad/s,1卷苗带用完后停机更换新苗带,重复进行试验。
栽植结束后,利用挖土铲将裸苗侧面土挖除,观察裸苗入土姿态。选取没有完全被土盖住的裸苗,利用直尺测量裸苗最低点至垄顶的栽植深度H
,5 cm≤H
≤8 cm则记该裸苗栽植深度合格。在栽植深度合格的前提下,测量处于类水平栽植区内的裸苗类水平栽植长度L
,L
≥8 cm即记为栽植姿态合格。统计每次栽植的总株数、栽植深度合格株数与栽植姿态合格株数结果见表4。表4 甘薯裸苗类水平栽植田间试验结果
Table 4 Field test results of horizontal planting of sweet potato naked seedlings
试验号Testnumber栽植株数Number ofplants planted栽深合格株数Number of qualifiedplanting depths栽植姿态合格株数Number of qualifiedplanting postures栽深合格率/%Proportions of qualifiedplanting depths栽植姿态合格率/%Proportions of qualifiedplanting posture 130292696.786.72303028100.093.3330272590.083.3合计 Total90867995.687.8
试验结果表明,自动喂苗栽植试验平台在设定的工作参数下,完成了甘薯裸苗自动喂苗栽植工作,栽植深度合格率达到95.6%,根据上文中提出的入土姿态要求,其栽植姿态合格率达到87.8%,说明本研究提出的基于挠性圆盘的类水平栽植方法在应用于甘薯裸苗栽植时能够满足甘薯裸苗类水平栽植的农艺要求。
6 结 论
本研究根据甘薯种植农艺要求,在甘薯裸苗的自动喂苗栽植装置的基础上,对基于挠性圆盘的甘薯裸苗类水平栽植运动过程进行了理论分析,利用台架与仿真试验进行了理论验证,提出了一种基于挠性圆盘的甘薯裸苗类水平栽植方法,得到了实现甘薯裸苗类水平栽植的主要工作参数,通过田间试验检验了栽植效果。主要结论如下:
1)理论情况下圆盘中心距地面高度、机具前进速度与圆盘角速度决定了甘薯裸苗触地瞬间弯曲朝向,裸苗在向前弯曲的情况下,根部在触地后会先向前移动一段距离。
2)台架试验表明,在圆盘中心距地面高度固定的前提下,传送带速度保持为0.25 m/s时,裸苗弯曲朝向与圆盘转速有关,当转速达到1.4 rad/s后,裸苗实际弯曲朝向与理论弯曲朝向的符合率达到98%。利用EDEM软件进行甘薯裸苗触地送苗仿真试验,试验结果与理论分析一致,且苗根触地后向前移动的距离和时间会随着圆盘转速的提高而降低,圆盘转速大于1.2 rad/s后,向前移动距离可降至10 mm以内。
3)田间试验表明,当机具前进速度为0.25 m/s,挠性圆盘转速为1.4 rad/s的情况下,自动喂苗栽植装置栽植的甘薯裸苗的栽深合格率达到95.6%,栽植姿态合格率达到87.8%。
猜你喜欢
电脑报(2022年17期)2022-05-09
辽河(2022年1期)2022-02-14
辽河(2022年1期)2022-02-14
汽车与驾驶维修(维修版)(2021年10期)2021-11-05
读者·校园版(2018年24期)2018-12-04
中学课程辅导·教师通讯(2018年10期)2018-09-04
中学生数理化·高一版(2017年3期)2017-07-08
红蜻蜓(2017年3期)2017-03-30
上海制造(2013年11期)2014-03-26
地图(2009年6期)2009-12-11
