仿生扑翼飞行器能耗研究进展
2022-11-06 13:37张春华
工程科学学报 2022年12期
赵 民,张 祥,付 强✉,张春华,贺 威
1) 北京科技大学智能科学与技术学院,北京 100083 2) 北京科技大学人工智能研究院,北京 100083 3) 中国兵器装备集团自动化研究所有限公司,绵阳 621000
人类最初的飞行梦想源于对自然界中鸟类和昆虫等飞行生物的模仿.根据气动布局和飞行动力来源,可将常见的飞行器分为固定翼飞行器、旋翼飞行器和扑翼飞行器三大类.固定翼飞行器无法实现悬停功能,而且机翼微型化后很难提供足够的升力;旋翼飞行器具备悬停能力,但是飞行效率会随着转子系统直径的减小而迅速下降[1];扑翼飞行器采用仿生飞行方式,在军事和民用领域有着广泛的应用前景[2],因其潜在的高飞行效率备受研究人员的关注.
近年来,随着微电子、智能材料、精密加工等高新技术的发展,仿生扑翼飞行器的研究取得了很大进展.国外代表性的研究成果主要有哈佛大学Wood 团队的“RoboBee”系列样机[3-6],代尔夫特理工大学Karásek 团队的“DelFly”系列样机[7-9],建国大学Park 团队的“KUBettle”系列样机[10-12],麻省理工学院的“Phoenix”[13],塞维利亚大学的“EFlap”[14],Festo 公司的仿生雨燕“BionicSwift”、仿生银鸥“SmartBird”[15]、仿生蝴蝶“eMotionButterflies”、仿生蜻蜓“BionicOpter”,以及Aero Vironment 公司的仿生蜂鸟“Nano Hummingbird”[16].国内代表性研究成果主要有北京科技大学贺威团队的“USTBird”[17-20]、仿生蝴蝶“USTButterfly-S”[21],西北工业大学宋笔锋团队的仿生信鸽“Dove”[22],哈尔滨工业大学(深圳)徐文福团队的仿生凤凰“HIT-Hawk”和“HIT-Phoenix”[23],北京航空航天大学王少萍团队的仿生蝴蝶“X-Butterfly”[24],以及上海交通大学张卫平团队的仿昆虫微型扑翼飞行器[25-26].虽然仿生扑翼飞行器在样机研制方面有了很大突破,但是离样机的实用化水平还有很大的差距,其中最大问题就是续航时间能力不足.仿生扑翼飞行器负载能力有限,对电池的重量和尺寸提出了严格要求.由于现阶段研制符合要求的高能量密度电池还存在着较大难度,因此最好的方法是“师法自然”,通过仿生设计降低能耗以增加续航时间.本文总结分析了自然界中飞行生物高效飞行的特征,讨论了仿生扑翼飞行器能耗的研究现状,对扑翼飞行器高效仿生设计的发展趋势进行了总结和展望,希望能给仿生扑翼飞行器的设计提供指导性建议.
1 飞行生物能耗研究
仿生扑翼飞行器是以自然界飞行生物为灵感进行设计的一类飞行器[27],因此在研究仿生扑翼飞行器能耗之前,对目前有关鸟类和昆虫能耗的研究进行总结整理,将有助于对仿生扑翼飞行器进行能耗分析.自然界中的飞行生物,无一例外全部采用扑翼方式飞行,它们只需要进行较少的食物补给,即可飞行较远的距离,其中它们自身的翅膀结构及飞行策略起着非常关键的作用.
鸟类的翅膀结构非常复杂,整个翅膀由初级飞羽、次级飞羽、覆羽和绒羽覆盖,且一般可分为两段—内翼和外翼,如图1(a)所示.不同的鸟类其翅膀形状一般不同,也导致其具有不同的飞行特性.如鸽形目和雀形目一般是椭圆形的翅翼,翅膀后翼宽阔,机动性能较强,能快速起飞,但在飞行时一般需要持续拍打翅膀,不利于远距离飞行;鸮形目翅膀一般长而宽阔,其初级飞羽的间隙较大,容易打散气流,使得它们能够很好地利用气流进行翱翔;雀形目翅膀则翼尖细长,能够进行快速飞行;长而细的翅膀形状多见于信天翁和银鸥等一些大型鸟类,这些鸟类一般具有较强的机动性和耐力,能够主动利用气流进行远距离滑翔[28].不同于由前肢演化而来的鸟类翅膀,昆虫翅膀多是由体节的背板向两侧扩展而成的,且翅膀结构相较于鸟类更加简单,一般仅由纵横交错的细且具有一定刚度的翅脉和具有一定韧性的薄翼膜组成[29],如图1(b).除了少许神经外,昆虫的翅膀只在翅根处与身体用肌肉连接,不具备骨骼和肌肉系统.

图1 生物翅膀结构.(a) 鸟类[28];(b) 昆虫[29]Fig.1 Structure of biological wings: (a) birds[28];(b) insects[29]
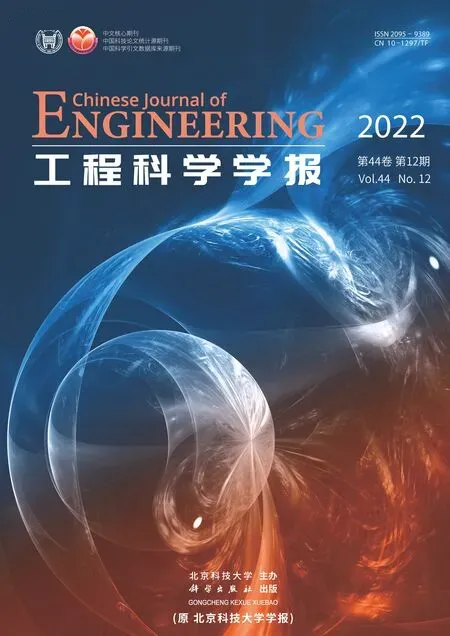
鸟类在一个飞行周期的不同阶段,翅膀会采用不用的扑翼动作.如图2 所示,以绿头鸭为例,在翅膀下扑时,内翼与外翼处于完全展开状态,增大了翅膀与空气的接触面积,提高了翅膀下扑时产生的升力,且在下扑过程中,由于鸟类羽毛具有一定柔性,翅膀呈现一定程度的上弯,如图2(a)~(f)所示;在上扑阶段,翅膀外翼折叠,与内翼成一定角度,减小上扑时的负升力,且随着上扑的动作,所呈角度越来越大,直至完全展开,如图2(g)~(l)所示.但鸟类在飞行时,往往不会一直扑动翅膀,一般采取“扑翼-滑翔-扑翼-滑翔”的飞行策略,在连续进行几次扑动后,维持翅膀展开不动,通过滑翔来减少能耗[30].除此之外,部分鸟类在长距离迁徙时,还会采用集群飞行的方式来减小能量消耗.例如鹤类、鹭类、雁鸭类等,它们会根据飞行时周围气流、环境等因素,采取不同的队形.鸟类集群飞行时,头鸟的翼尖处会形成空气漩涡,这个漩涡产生的翼尖力,会形成一种升力,当后面的从鸟与前面的鸟保持一定的位置关系和距离时,通过调整自身拍打翅膀的节奏,就能够节省体力延长飞行距离[31].
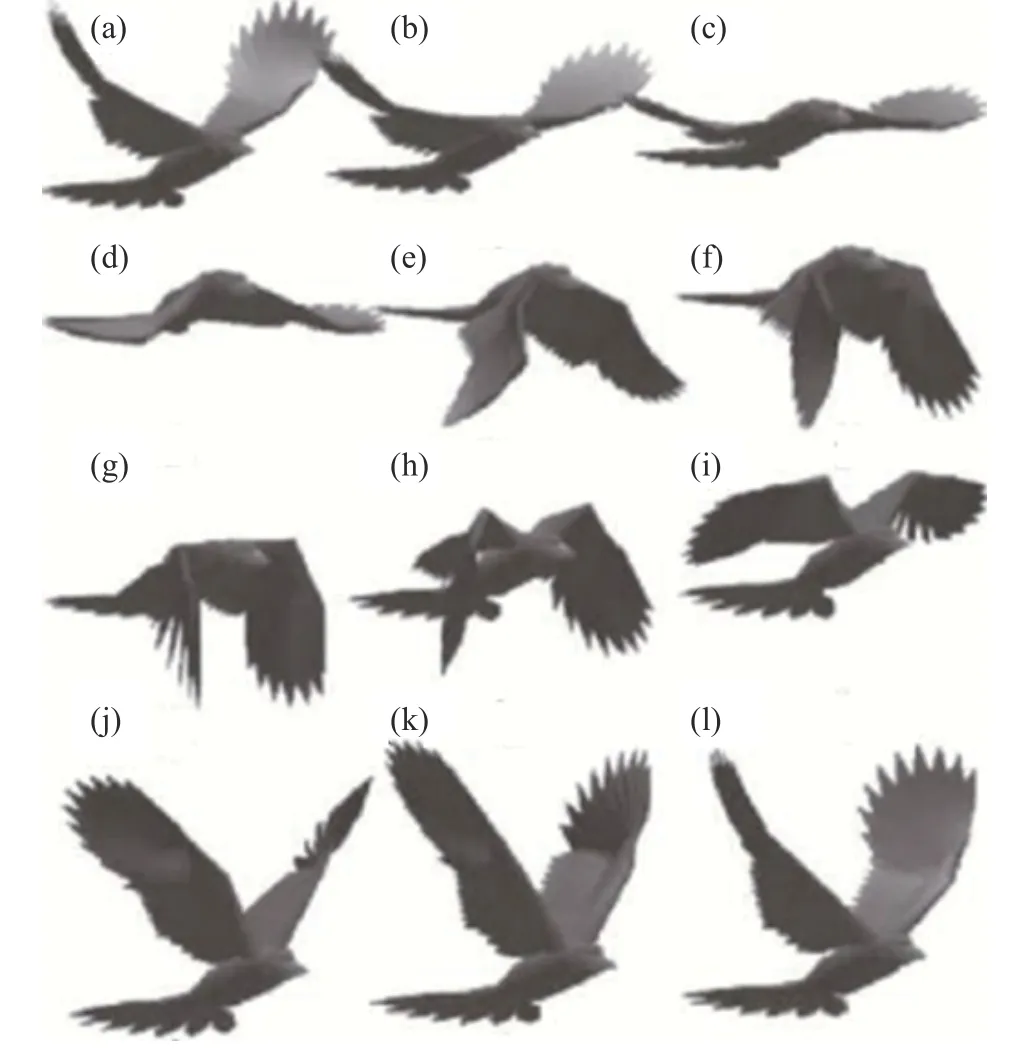
图2 鸟类扑翼飞行一个周期的分解图[32].(a)~(f)为下扑阶段;(g)~(l)为上扑阶段Fig.2 Decomposition of flapping wing movements in birds[32]:(a)-(f)show the downstroke of flapping motion;(g)-(l)show the upstroke of flapping motion
昆虫的翅膀是单段翼结构,且由于翅膀中不具备骨骼和肌肉系统,导致其只能在翅根处控制翅膀的扑动,翅膀的变形只能在外界气动力的作用下产生被动的形变,无法完成像鸟类翅膀一样复杂的“打开-合拢”动作.但在飞行过程中,昆虫翅膀的运动方式主要有以下特点:第一,昆虫在整个扑翼过程中其翅翼会有较大的扭转运动,昆虫会利用翅根处的肌肉在一定范围内主动扭转翅翼,这种方式会使得整个扑翼过程中其迎角不断变化,同时气动力和惯性力也会帮助进行这种扭转动作[33];第二,昆虫翅膀虽然不具有“打开-合拢”机制,但是它们却可以通过将串列翼相互叠合等操作来减小翅翼上扑时的受力面积[34];第三,昆虫的翅翼在扑动过程中会产生较大的弯度.这些运动方式使得昆虫在飞行过程中能够产生足够的升力和推力.
由上述可知,鸟类和昆虫都可以根据自身状态不断变换翅膀运动方式,根据翅膀所处扑翼阶段,调节翅翼受力面积,使其能够以较少的能耗产生较大的升力与推力,满足自身飞行所需的动力.同时,在长时间飞行时,鸟类又会采取“扑翼-滑翔-扑翼-滑翔”的扑翼方式,通过连续拍打几次翅膀后,维持翅膀不动,减小扑翼频率,减少能耗,增加续航.在长距离飞行时,鸟类还会采取集群飞行的方式,合理利用头鸟产生的翼尖涡,来减少从鸟飞行所需的能耗,延长飞行距离.通过对鸟类和昆虫翅膀结构及飞行特点的学习,可以将影响鸟类和昆虫能耗的因素归为三类,一是翼面几何参数与迎角等静态参数,二是扑翼过程中翅膀的扑动姿态及动态扭转角,三是鸟类长时间或长距离飞行时的飞行策略,包括“扑翼-滑翔-扑翼-滑翔”和集群飞行策略.本文对于仿生扑翼飞行器能耗的研究进展将从翼面材料与静态参数、扑翼动态参数与储能结构、控制策略三个方面进行介绍.
2 仿生扑翼飞行器能耗研究
2.1 仿生扑翼飞行器能耗组成
仿生扑翼飞行器通过电机与齿轮组等组成的驱动机构将电机的转动转换为翅膀的上下扑动,实现仿生扑翼飞行器的飞行.在整个飞行过程中,仿生扑翼飞行器的能耗总体上可分为两部分,一部分为机体所消耗的能量,包括飞行控制器电路的热损耗、驱动结构的传动损耗;另一部分为机翼扑动所产生的与空气动力学相关的能耗,该部分又可分为三部分[35],包括用来产生升力和克服空气阻力所需的气动能耗,用来加速机翼及周围气体所需的惯性能耗和被动存储在机翼弹性结构中的弹性能耗.机翼扑动所产生的与空气动力学相关的三部分能耗之间不是恒定不变的,而是随着一个扑翼周期内机翼的上下扑动,三部分能耗之间存在相互转化[36].当机翼处于扑翼加速阶段时,机翼的惯性能耗会被主要用于加速机翼及其周围的流体,使扑翼动能增加,惯性能耗减小;当机翼处于扑翼减速阶段时,机翼的动能则会被主要用于克服空气阻力做功,或者存储于机翼的弹性结构中,使扑翼动能减小,气动能耗和弹性能耗增加.
现在有关于仿生扑翼飞行器能耗的研究大致可分为以下两种思路:一种思路是研究单一参数对仿生扑翼飞行器能耗的影响,得到该参数与仿生扑翼飞行器能耗的具体关系.这种研究比较简单,可以利用风洞试验得到测试数据,通过分析测试数据来指导仿生扑翼飞行器的设计.但是,该研究思路往往只能得到能耗随参数变化的定性结论,在具体的飞行器设计时,需要结合实际样机情况具体设置参数.另一种研究思路是同时研究多个参数对仿生扑翼飞行器能耗的影响,通过调节各参数的不同组合,得到一种能耗最低的最优组合.这种方法变量较多,如果采用风洞实验,实验次数将随着变量的增加呈指数型增长,使得研究难度大大增加,所以这种研究多采用数值计算的方式.相较于自然界中的飞行生物,仿生扑翼飞行器的动力主要依靠自身携带的电池来提供.仿生扑翼飞行器受负载能力的限制,携带的电池主要以轻型、小容量的锂电池为主,续航时间有限,提升续航时间最直接的办法是采用新型轻质高能量密度电池.目前,关于新型高能量密度电池的研究已经取得了一定进展[37-39],但是适用于仿生扑翼飞行器的新型轻质高能量密度电池有待进一步开发,因此对于新型轻质高能量密度电池的研究不再做过多讨论.
2.2 翼面材料与静态参数
针对仿生扑翼飞行器的研究还未形成完整的理论体系,对于仿生扑翼飞行器的样机研制也是处于探索时期.与仿生扑翼飞行器能耗相关的静态参数有很多,但目前的研究主要集中在翅膀形状、刚柔耦合以及不同的翼膜材料等对扑翼飞行器能耗的影响,旨在通过机翼展弦比、新的翼膜材料、翼展大小等对仿生扑翼飞行器的能耗影响,在整机的设计上面得到优化,从而设计出低能耗、长续航的仿生扑翼飞行器.
在翼面几何参数对扑翼飞行器能耗影响方面,刘懿和张艳来[40]通过模型实验测量和CFD(Computational fluid dynamics)数值仿真,对扑翼飞行器各部分能耗进行了研究.通过实验测量研究了总输入功率和电机的功率损耗随着机翼面积、翼根攻角和扑翼频率的变化规律,通过CFD数值仿真分析了不同参数对气动能耗和惯性能耗的影响规律.吴应东[41]通过实验对可能影响扑翼飞行器能耗的几何参数进行了研究,并根据结果对仿生扑翼飞行器进行了优化.Nguyen 等[42]通过实验研究了机翼展弦比、机翼偏置量以及扑动频率三个参数对扑翼气动能耗的影响.实验结果显示,展弦比的增大对气动能耗的影响不明显,但大的展弦比会使翼尖处扑翼速度增大,使惯性能耗增加,而惯性能耗是包含在机械结构能耗中的,故展弦比的增大会使机械能耗增加,但展弦比对惯性能耗的影响弱于扑动频率;气动能耗和机械能耗与扑动频率呈正相关,但与平均弦长呈负相关.
在机翼柔性度对能耗的影响方面,Mountcastle等[43]通过对大黄蜂翅膀进行加固处理,进行了一项研究以检验翅膀的灵活性对气动力产生的影响.研究结果显示,柔性机翼能够在扑动过程中产生有利于飞行的柔性形变,从而起到增大升力和提升载荷的作用.Nakata 等[44]的研究指出,在悬停过程中,柔性机翼能比刚性机翼产生更大的垂直气动力,并且具有更高的效率.Thiria 等[45]通过改变翼膜厚度研究了柔性机翼对扑翼飞行器系统推进效率的影响,研究结果表明,机翼的柔性不仅可以使消耗功率大幅减少,还增大了推力.如图3(a)所示,Pi表示不同柔性翼的功耗,通过设计不同的翼膜厚度h来改变机翼的柔性,结果表明在25~30 Hz 的频率范围内,柔性最大的机翼可以比柔性最小的机翼节省高达60%的功耗.研究中还发现,不同厚度翅膀的最优能耗频率不同,如图3(b)所示,定义了效率因数η=PT/Pi,其中PT表示推进功率,0.4 mm 厚度的最优频率大概在25 Hz 左右,0.25 mm 厚度的最优频率则在29 Hz 左右,这也意味着在翅膀薄膜厚度选择上面,要根据扑翼飞行器的扑动频率选择合适的翅膀薄膜厚度.

图3 能耗/效率随频率的变化图[45].(a) 电机消耗的电能随频率变化;(b) 效率因数η 随频率变化Fig.3 Energy consumption and efficiency curve with the frequency of a flapping wing[45]: (a) electrical power consumed by the motor and (b) efficiency factor η as a function of frequency
除了对翼面几何设计参数和翼膜柔性进行研究外,还有团队正在尝试采用新的材料为扑翼飞行器进行供电或者辅助供电.其中美国哈佛大学研制的“Microfly”微型扑翼飞行器(图4(a))就采用了压电驱动方式[46],该扑翼飞行器整机重60 mg,扑动频率为110 Hz,可在6 m·s-1的速度下飞行,是目前已知的最小的仿生扑翼飞行器,与真实苍蝇极为相似.该团队的另一款扑翼飞行器Robobee X-Wing 同样没有采用传统锂电池作为电源[6],而是在飞行器顶端安装了块边长约5 mm 的太阳能电池板,如图4(b)所示,只要持续有光源照射,这些电池板就能够为这款扑翼飞行器提供飞行所需的能源.
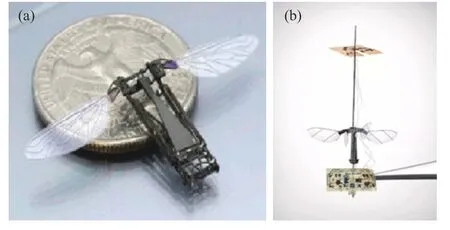
图4 压电驱动和太阳能驱动飞行器.(a) Microfly[46];(b) Robobee XWing[6]Fig.4 Wing drive by piezoelectric materials or solar energy: (a)Microfly[46] ;(b) Robobee X-Wing[6]
使用单一的太阳能或压电材料为扑翼飞行器不间断地提供能源,这一方法一般只适用于质量较小的扑翼飞行器,当扑翼飞行器质量较大时,这两种方式能够提供的电能有限,但可作为机载辅助供电系统来增加飞行器的续航能力.吉林大学的房志飞采用PVDF 压电薄膜(图5(a))设计了一款能量回收翅翼[47],这一设计的好处在于能够在不增加负载的情况下,以较低的翅翼振动频率提取振动能量,并以辅助供能的方式为系统供电.该压电薄膜翅翼在设计的仿生扑翼飞行器上,最高可产生93.6 μW 的输出功率为系统供电.马里兰大学Perez-Rosado 于2015 年设计了一款太阳能回收翅翼[48],如图5(b)所示,首先通过将太阳能电池从封装结构中剥离来降低材料刚度,然后将其集成在扑翼上,使之成为多功能结构,在实验机翼60.58 cm 的翼展下,阳光充足时每个模块可以获得50 mA、6 V 的输出.西北工业大学的杨文青设计并测试了一种单向孔扑翼[49],孔之间通过铰链连接,上冲程过程中铰链打开,下冲程过程中铰链关闭,如图6(a)所示.然而,铰链连接不能保证单向孔开闭的连续性.在此基础上,利用鸟类羽毛的单向开闭特性对该方法进行了改进,采用羽毛作为扑翼的覆盖皮(图6(b)),可以实现连续的开闭间隙,使扑翼过程更加平稳,获得平滑的气动特性.结果表明,单孔/间隙扑翼可以有效提高升力,降低能耗.
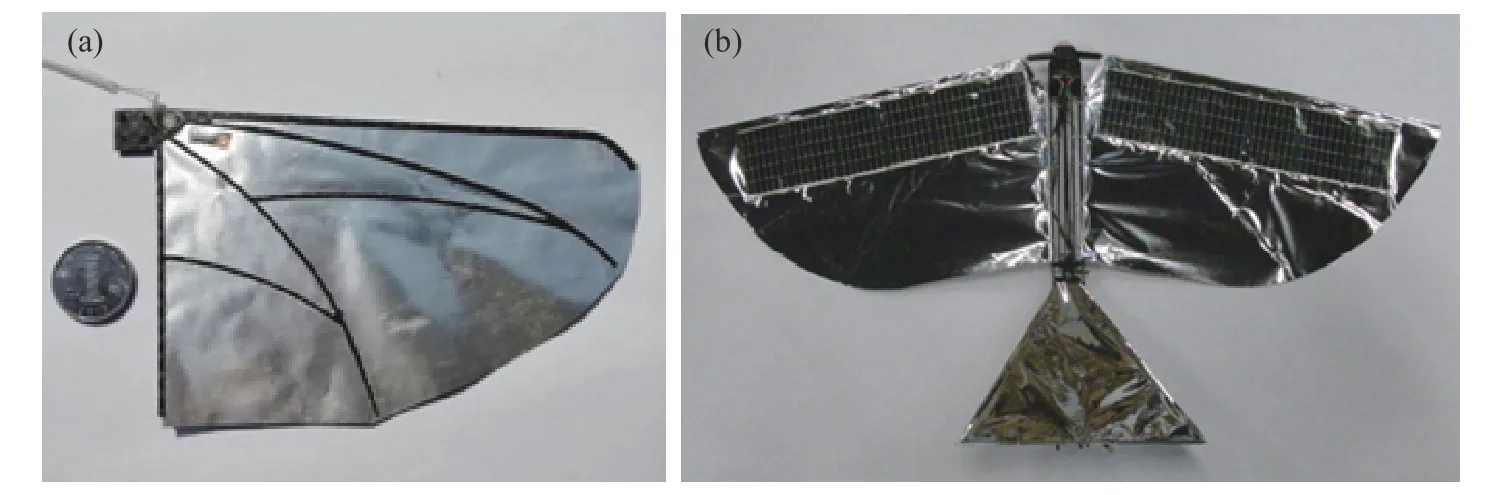
图5 采用辅助供电系统延长续航.(a) 压电薄膜翅膀[47];(b) 太阳能回收机翼[48]Fig.5 Auxiliary power supply system to improve endurance: (a) piezoelectric thin film material wings[47];(b) solar recovery wing[48]

图6 仿生开闭机制[49].(a) 单向孔机翼模型;(b) 羽毛机翼和薄膜机翼Fig.6 Bionic opening and closing mechanism[49]: (a) model of the wing with one-way holes;(b) feather-covered flapping-wing and membrane wing
2.3 扑翼动态参数与储能结构
扑翼飞行器的动态参数主要指扑翼过程中机翼的被动扭转、弯折、机体的俯仰等参数,以及扑翼频率、扑动幅值、机翼的展开与合拢等动作.本节也将从这几个方面进行研究总结.
关于扑翼幅值和扑翼频率等单一因素对扑翼飞行器能耗的影响研究较多,国内外都进行了大量实验,付鹏等[50]在2016 年通过风洞实验,研究了不同单一参数对扑翼飞行器能耗的影响,研究参数涵盖了扑翼频率、扑翼幅值以及斯特劳哈尔数,但该研究仅涉及单一参数的定性研究,并未涉及到多参数耦合或者参数优化设计等问题.Ke等[51]以线性展弦比约束和非线性雷诺数约束为惩罚项,研究了基于功率密度模型的机翼几何参数和机翼运动参数的悬停飞行能耗最小化问题.在动态俯仰轴对飞行器能耗影响方面,Wang 等[52]通过设计四种不同翅膀,研究了在悬停状态下,被动俯仰扑翼飞行器的俯仰轴位置对飞行器能耗及气动力的影响.研究结果显示,最优俯仰轴位置位于前缘和中弦线之间,而大多数扑翼飞行器使用的传统机翼只是简单地在翅膀前缘上下摆动.从功率消耗的结果显示,运动学优化的情况下,最优俯仰轴机翼可以节省多达33%的能耗,同时最优俯仰轴的位置也影响系统动能回收能力.在最优俯仰轴的情况下,通过恢复机翼动能,可以节省超过13%的动力消耗,而传统机翼节能的能耗基本可以忽略不计.
在研究自然界飞行生物时发现,它们在飞行时都会产生沿翅膀展向的扭转或弦向的弯曲,这种变形会产生相当大的应变能量,这种能量可以被回收用来在一个扑翼周期中加速或减速翅膀,这种机制被认为可以减少飞行时的惯性能耗需求,影响飞行生物的飞行效率[53-57].Young 等[58]通过流体力学对蚱蜢翅膀的研究发现,翅翼的形变显著提高了蚱蜢前飞时平均力与功率之比.Zheng等[59]利用三维非定常Navier-Stokes 方程,比较了扭转翼与平直翼,验证了扭转和拱度对自由飞行蝴蝶气动性能的影响.他们的研究成果都表明,可变性机翼(包括展向扭转和弦向弯曲)产生的力和力/功率比可分别比平直机翼高出29%和46%.同时在前飞过程中,机翼扭转的影响在升力产生和升力/功率比方面的影响显著.Le 等[60]研究发现,机翼的扭转和拱度显著提高了平均升力和推力,而所需的能耗比刚性机翼更小.Du 和Sun[61]的进一步研究指出,弦向的弯曲增加了升力,而展向的扭转则在降低能耗方面起到一定的作用.Phan 等[62]则采用非定常叶片单元理论,研究了悬停状态下沿翼展方向的机翼扭转对垂直气动力的影响,并与平直机翼在垂直气动力和能耗方面进行了比较.Jankauski[63]针对机翼的柔性变形对扑翼飞行器能耗的影响做了研究,研究发现适当的柔性形变会降低峰值瞬时功率,但当机翼的柔性形变过大时,大的形变会招致额外的能量消耗.同时该研究指出,通过调整机翼前缘梁的直径或材料可以有效调整机翼的固有频率,从而影响飞行器气动性能.Lehmann[64]通过对机翼变形功率的估计,证明了在飞行中机翼展向弯曲是造成机械能损失的来源.
鸟类或者昆虫的翅膀都由肌肉驱动,但由于技术限制,目前还无法将人造肌肉应用于仿生扑翼飞行器中,这导致人造扑翼飞行器与自然界中的飞行生物依然存在巨大差距.飞行生物的肌肉可以在它们每一次扑翼行程的末端,将翅膀的动能存储在肌肉系统中,并在下一行程中释放[65].而使用刚性连接杆与齿轮的组合进行驱动的人造扑翼飞行器,无法将这一动能转换成弹性势能,造成了能量损失.为了能够实现弹性势能的存储与释放,一种带弹性阻尼结构的驱动结构被提了出来,张威等[66]通过在美国拉华大学“Sparrow”扑翼结构的顶端及两侧分别加装弹簧(图7),发现带有弹性阻尼结构的驱动机构不仅可以减小能耗,还可以降低运动副的冲击力,达到减震、降噪的目的,同时延长机构的使用寿命.但由于弹簧的存在,这种带弹性阻尼结构的驱动机构重量会过大,科研人员逐步将目光转向了使用柔性弹性结构替换弹簧结构进行能量存储上.例如哈佛大学的Sahai 等[67]采用了基于橡胶材料的柔性铰链结构(图8(a)~(b)).该结构经过试验验证,相比于传统结构,能节约20%能量消耗和1%的重量,同时该机构提供的推力更大.南洋理工大学的Lau 等[68]采用轻质聚酰亚胺薄膜铰链作为弹性势能存储元件,同时采用碳纤维板增加了聚酰亚胺铰链的刚度,如图8(c)、8(d)所示.该机构具有非线性增加的刚度,可以使机翼在结束行程时迅速减速,并随后帮助机翼扭转.实验结果表明,与刚体机构相比,该机构可以在扑翼频率为25 Hz 时,节约近21%的能耗.Hines 等设计了一种新型双电机驱动的微型扑翼飞行器,机翼和电机连接处通过利用弹性元件进行能量回收,系统可以产生共振,减少电机转子和机翼运动所需的功耗[69].

图7 带弹性阻尼结构的驱动结构[66]Fig.7 Drive structure with elastic element[66]

图8 带柔性储能元件的驱动机构[67-68].(a) 哈佛大学微型扑翼飞行器;(b) 四连杆传动机构;(c) 南洋理工大学的微型扑翼飞行器;(d) 聚酰亚胺薄膜铰链弹性势能存储元件Fig.8 Drive mechanism with flexible energy storage element[67-68]: (a) flapping-wing micro air vehicle of Harvard University;(b) transmission forming a four-bar;(c) flapping-wing micro air vehicle of Nanyang Technological University;(d) polyimide film hinges for elastic energy storage
自然界中的鸟类通过肌肉驱动且翅膀一般分为内翼和外翼两部分,它们在飞行的上扑或下扑过程中,会根据所处阶段的不同选择打开或合拢动作,即使是单段翼的昆虫,也会进行翅膀的扭转与折叠等动作.扑翼飞行器则多采用单段翼的结构,这种结构会使得翅膀上扑的时候,产生较大的负升力,造成能量浪费的同时也不利于仿生扑翼飞行器的飞行.德国Festo 公司的Smartbird 飞行器就采用了多段翼被动弯折设计,其外翼与内翼之间采用了如图9 所示的机构,这种设计使得Smartbird 在下扑阶段翅膀处于完全张开的状态,并在上扑阶段被动弯折,减少受力面积,这一设计使得Smartbird 具备了出色的飞行性能.王超红设计了一款驱动机构[70],该机构同时具有弹性储能结构和多段翼结构,可对两侧机翼进行独立控制.在翅膀上扑时可将翅膀折叠,同时在每个扑翼行程的末端将能量存储在弹性结构中,使得该设计平均升力更高,能耗更小.
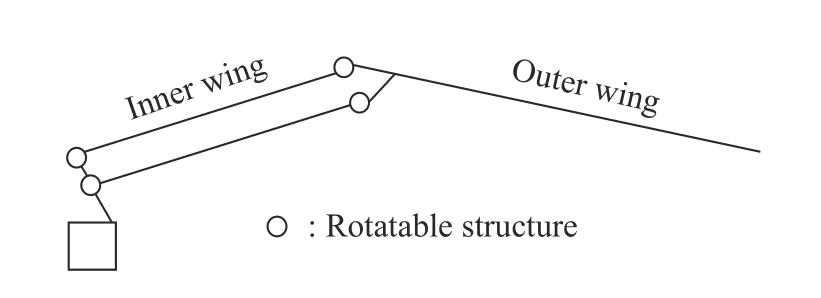
图9 Smartbird 机翼被动弯折结构Fig.9 Wing structure of Smartbird
2.4 控制策略
近年来,仿生扑翼飞行器样机研制取得了很大进展,样机的性能指标得到了很大提升,但对于扑翼飞行器控制策略的研究仍处于起步阶段.针对扑翼飞行器飞行控制的研究主要包括姿态控制[71]、振动控制、路径规划[72]和编队控制等,由于扑翼飞行器动力学建模困难且大部分研究集中在理论分析,诸如基于能量优化的扑翼飞机姿态控制[73]和高能效飞行轨迹控制[74]等方法尚未在扑翼飞行器样机得到实验验证.
鸟类在长时间飞行时,会间歇性采取滑翔的动作,可以有效节省能量,国内外机构和学者都对这一飞行方式产生了兴趣.Hosoi 等[75]设计了一款小型蝶形扑翼飞行器,这款扑翼飞行器可以在扑翼和滑翔之间切换,结果显示,即使是扑翼飞行的小型昆虫,采用滑翔飞行方式也能够节省能量.蒋国江[76]将仿生扑翼飞行器分解为六体的多刚体模型,其中机身和尾翼各为一个刚体,每只机翼看成两个刚体,之后采用拟坐标拉格朗日方程建立了仿生扑翼飞行器的多体动力学模型.Johnson等[77-78]建立了单段翼的“扑翼-滑翔”模型,该模型结合了滑翔飞行的非线性动力学和机载电池的等效电路放电模型,通过电池续航时间和飞行距离来判断仿生扑翼飞行器的“扑翼-滑翔”模型势能.结果显示这一模式只有在扑翼时才会消耗电池能量,采用这一模型的仿生扑翼飞行器可以大大增加续航时间.Chen 等[79]借鉴鸟类翅膀收合运动特点,设计了一款新颖的仿生机构,在下冲程阶段展开机翼以产生升力和推力,并在上冲程阶段收缩机翼;机翼扑动运动与变形运动耦合在一起,通过对机翼变形与扑动的简单解耦,实现下冲程时的机翼变形运动,室外飞行测试结果如图10 所示,其中Δt表示相邻飞行动作的时间间隔.Ma 等[80]基于层次分析法(AHP)的综合评价方法,建立了扑翼飞行器自主起降方案的模糊综合评价模型,确定混合布局垂直起降方案是最佳方案;在此基础上,对一种四旋翼混合动力布局的扑翼飞行器样机进行了详细设计和研制(图11),结果表明通过四旋翼混合布局设计的扑翼飞行器具备良好的自主起降能力,能耗分析表明具有更长的任务续航时间.

图10 户外飞行能力测试[79].(a) 倾斜转弯;(b) 爬升;(c) 快速滚转机动飞行Fig.10 The ability test for outdoor flight [79]: (a) banking turn;(b) climb;(c) rapid rolling maneuver

图11 四旋翼混合布局的扑翼飞行器研制[80].(a) 风洞实验装置;(b) 四旋翼混合布局的扑翼飞行器原型机Fig.11 Design of the hybrid layout flapping-wing air vehicle[80]: (a) experimental setup for the wind tunnel experiment;(b) prototype of the four-rotor hybrid layout flapping-wing air vehicle
自然界中的飞行生物,在远距离迁徙时,往往采用集群飞行的策略,Weimerskirch 等[81]通过对雁群的研究发现,在集群飞行时,头雁拍动翅膀会产生涡流,使在此涡流中飞行的从雁的升力大大提升,从而节省大约11%~14%的体能,但这一飞行方式也会使头雁的体能消耗增大.Voelkl 等[82]进一步研究发现,在雁群的多种阵型中,V 字型阵型对于雁群的能量节省效应最明显.而Andersson等[83]研究指出,在雁群的V 字型阵型中,锐角V字型阵能使从鸟节省能耗,而对于头鸟的能耗节省效果不明显,更适合低雷诺数下的大型鸟类使用;而钝角V 字型阵对各个位置的飞鸟都有节约能耗的效果,更适用于小型鸟类.国内段海滨教授团队通过观察鸽群的飞行方式,提出了一种基于鸽群的编队控制方法,该方法通过引入虚拟长机的方式避免了长机与僚机之间的通信干扰,提高了控制精度[84].尹曌等[85]基于大雁迁徙过程中的编队飞行机制,研究了扑翼飞行器高效集群飞行控制方法,实现了仿生队形的维持和队形的变换,进一步验证了理论方法的可行性.
3 研究方向展望
虽然有关仿生扑翼飞行器能耗方面的研究已取得一定成果,但与自然界飞行生物对比发现,现有仿生扑翼飞行器的飞行效率与自然界真实鸟类之间还存在较大差距[86].当前,仿生扑翼飞行器正处于快速发展的阶段,但续航能力的不足将大大限制仿生扑翼飞行器的实际应用价值,通过对仿生扑翼飞行器能耗进行更全面的研究来提升仿生扑翼飞行器的续航能力具有重要意义.本文结合仿生扑翼飞行器能耗研究现状,提出以下研究方向:
(1)翼面设计参数-机翼表面结构研究
清华大学团队通过对鸟类羽毛表面微观结构的分析,揭示了鸟类羽毛表面摩擦减阻的生物学特性[87].西北工业大学团队采用数值模拟的方法,研究了不同小羽翼几何参数对翼型气动性能的影响[88].北京航空航天大学团队通过数值仿真的方法,分析了翅翼的褶皱结构对气动力的影响[89].自然界种鸟类和昆虫翅膀形态结构对于样机性能的提升具有重要的借鉴意义,但是目前对于仿生结构的分析主要集中在理论研究,并未在样机上开展相关的试验测试.因此,开展样机机翼结构仿生设计以及试验测试,对于提高仿生扑翼飞行器的外观和性能具有重要的意义.
(2)扑翼动态参数-弹性储能结构研究
自然界中的鸟类具有非常复杂的肌肉系统[90],这些肌肉除了用于驱动翅膀飞行外,还会在翅膀上扑或下扑的时候,将部分动能转换成弹性势能储存起来,在翅膀下一个下扑或上扑时释放,节约了能量.仿生扑翼飞行器的驱动机构一般采用曲柄摇杆或齿轮摇杆的形式,由刚性连接件直接连接,在机翼处于上扑或下扑的末尾阶段时无法回收部分动能.虽然引入弹性元件已被证实可以有效降低扑翼飞行器功耗,同时延长驱动机构寿命[91-92],但目前尚未有较好的设计应用在仿生扑翼飞行器上,因此设计一款可实际应用于仿生扑翼飞行器上带弹性元件的驱动机构十分重要.
(3)控制策略-多段翼控制策略研究
自然界中的鸟类翅膀一般分为多段,在不同的扑动状态下,一般采用展开与合拢动作的不同组合.有关鸟类翅膀扑动状态的研究指出,鸟类在下扑时,翅膀一般完全展开,而在上扑阶段时,则会收拢外翼,这一动作会增大翅膀下扑时的升力,同时减小翅膀上扑时产生的负升力,增大了一个扑翼周期的平均升力.但仿生扑翼飞行器往往采用单段翼结构,翅膀在上扑时大量能量用于产生不利于飞行的负升力,增加了能耗.这种可折叠的仿生扑翼飞行器设计已被证明在一个扑翼周期内可以产生更高的平均升力[93],因此对这一结构进行深入研究具有实际意义.
(4)新型轻质高能量密度电池研究
目前,大容量电池应用主要面向固定翼和旋翼飞行器,仿生扑翼飞行器受负载能力的限制,所能携带的电池容量有限,导致续航能力不足,限制了扑翼飞行器的应用推广.通过研制新型轻质高能量密度电池,可以有效提升扑翼飞行器的续航时间.以小质量和高能量密度为优化目标,开展仿生扑翼飞行器电池的研究,对于推动仿生扑翼飞行器在民用和军事领域的应用具有重要的意义.
4 结束语
本文从自然界中飞行生物出发,总结了自然界飞行生物拥有高效飞行能力的一些特点,以及这些特点对扑翼飞行器续航能力影响的研究进展,为提高扑翼飞行器续航能力提供了一些参考.对于传统旋翼与固定翼飞行器,其技术都已相对成熟,可以通过优化设计和能量回收延长续航,但目前对仿生扑翼飞行器的研究还处于对自然界中飞行生物的简单模仿,一些理论与模型还不准确,在电池材料技术与载重能力短时间内无法取得重大突破的情况下,通过仿生设计研究各个参数对扑翼飞行器能耗的影响,进而优化各设计参数,以及寻找合适的能量回收与辅助供电系统是未来提高仿生扑翼飞行器续航能力的重要方向.
猜你喜欢
学与玩(2022年9期)2022-10-31
装备制造技术(2020年1期)2020-12-25
北京航空航天大学学报(2020年10期)2020-11-14
空间科学学报(2020年4期)2020-04-22
文苑(2020年12期)2020-04-13
小太阳画报(2019年1期)2019-06-11
北京航空航天大学学报(2017年6期)2017-11-23
北京航空航天大学学报(2016年3期)2016-02-27
航空学报(2015年4期)2015-05-07
少年科学(2014年7期)2014-08-18