
带状测区像控点布设对无人机影像空三精度的影响
2022-11-04 05:50吴海兵王艳波刘晓文
北京测绘 2022年10期
吴海兵 王艳波 刘晓文
(1. 南京市水利规划设计院股份有限公司, 江苏 南京 210022;2. 山东广源岩土工程有限公司, 山东 烟台 264000)
0 引言
无人机影像像幅小、数据量大,航向和旁向重叠度因航拍过程中无人机姿态变化大而不规则,因此无人机航测暂时无法达到传统的空三测量水平,为提高测区成图精度,需要通过一定数目的地面控制点来修正系统误差带来的影响[1-4]。无人机航测像控点布设通常参照文献[5-8],即区域网布点时像控点之间的跨度要以满足空中三角形精度为要求,需要依据成图精度、航摄资料的有关参数等多种因素决定[9-12],不能完全适用于各种特殊地形地貌条件和工程应用需求[13-15]。
水利工程大型河道类项目在勘测设计阶段通常需要河道两侧背水坡坡脚线外50~100 m带状区域的大比例尺地形图,带宽长度一般情况下低于350 m。由于河道呈“S”形弯曲状,固定翼类无人机在航线规划时应视具体情况截弯取直分段划分,各分段区域呈矩形状,考虑到像控点布设便利等因素,一般情况下矩形宽度500 m即可满足大型工程地形图范围需求。针对大型河道工程带状区域无人机航测的特点,本文对均匀布设做一些调整,从而选取一种适合大型河道工程条带状测区无人机航测的控制点布设方案,在满足成图精度要求的前提下,相对减少像控点数量,提升工作效率。
1 研究对象介绍
本文研究对象以江苏省常州市金坛区某河道水系整治工程作为试验区域,航线规划带宽约500 m,带长约3 500 m,测区内有两座桥梁,地势较为平坦,多以平原为主。无较高建筑物,地面最大高差小于15 m。
2 无人机摄影测量
2.1 数据采集
2.1.1影像采集设备
航测遥感无人机平台为成都纵横CW10电动垂直起降固定翼无人机,翼展2.6 m,最大续航时间90 min,巡航速度为20 m/s,最大任务荷载2 kg。搭载相机为Sony_LICE_7R,检校焦距35.624 3,影像分辨率7 360×4 912像素,拍摄面积1.8 km2。平均相对航高358 m,航向重叠度70%~80%,旁向重叠度60%~70%,像素大小为4.88 um。飞行时天气状况良好。
2.1.2像控点采集设备
像控点坐标和高程采用水利工程四等全球定位系统(global positioning system,GPS)、国家四等水准控制网,按GPS 实时动态载波相位差分技术(real time kinematic,RTK)方式测定,其中像控点采集设备使用的是南方测绘——云帆RTK测量系统,动态精度:平面为±(8+1×10-6×D)mm、高程为±(15+1×10-6×D)mm(D为所测量的基线长度,单位为mm),满足RTK图根点测量精度要求。
像控点采用飞前布控方式,区域长边按近似500 m间距均匀布设16个平高点,区域内部依据河道中心线按近似250 m间距均匀布设15个平高点,实际作业中无法保证布点位置的绝对规整。
2.2 数据处理
数据处理首先采用PIX4D专业软件对原始无人机影像进行预处理,获取精度较高的定位定姿系统(position and orientation system,POS)数据和相机检校参数,然后将从PIX4D预处理获得精度较高的POS数据和相机检校参数导入INPHO专业软件进行空中三角测量加密工作,具体技术流程如图1所示。
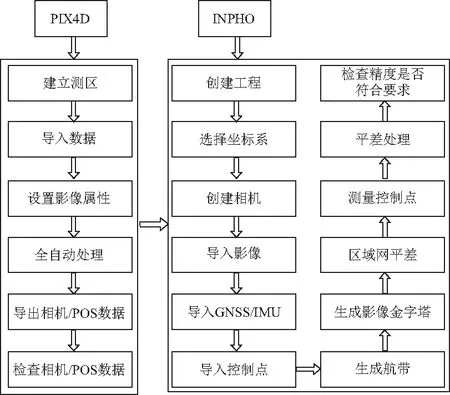
图1 数据处理技术流程
2.2.1PIX4D数据处理
采用PIX4D专业软件对原始数据进行预处理,首先建立工程将获取的原始无人机影像导入到PIX4D专业软件,然后设置无人机影像属性,包括POS数据坐标系和相机参数,最后对软件进行自动化处理,其过程主要是为获得精度较高的POS数据和相机检校参数。
2.2.2INPHO数据处理
采用INPHO专业软件进行空中三角测量加密工作。首先建立工程,选择工程坐标系,本工程平面坐标系采用的国家2000坐标系,高程系采用的是1985国家高程基准。然后创建相机,相机参数使用PIX4D处理后较高精度的相机检校参数。再依次导入影像、POS数据和控制点,此时软件会自动生成航带进行空中三角测量。在空中三角测量过程中对无人机影像先进行金字塔抽样成不同分辨率,根据分辨率由低到高分别进行连接点匹配平差,所以原始POS和相机文件的质量决定了平差的精度,因此需要采用PIX4D专业软件对原始相机参数和POS数据进行预处理,优化POS精度和相机参数。
3 像控点布设方案及空三精度分析
3.1 像控点布设原则
像控点的主要作用是为了提高空中三角测量的精度和绝对定向,使数字线划地图(digital line graphic,DLG)、数字正射影像(digital orthophoto map,DOM)等成果具有绝对地理坐标,提高空中三角测量的同时也能检查空中三角测量的精度。布设像控点方式与数量决定了成果的精度。通常需要根据地形条件、摄影资料及信息处理方法的不同,布设方案也要做相应调整。布设原则具体如下:
(1)根据测区范围统一布点,像控点应均匀且立体地布设在测区范围内,形成一定的几何强度,点位的分布应避免形成近似直线。
(2)布设密度要考虑测区的地形和精度要求,如地形起伏较大,地貌复杂,需适量增加像控点的布设数量。
(3)选点要尽量选择固定、平整、清晰易识别、无阴影遮挡区域。
3.2 像控点布设方案
区域网像控点布设方案主要有三种:正规布点法、品字形布点法、密周边布点法[2]。通常情况下,品字形布点数量少、精度低,密周边布点法试用于水域区域,正规布点法像控点数量较多、精度较高,较可靠。
传统航测像控点布设方式和布设图形较为规则且数量多,在施测困难区域不具有操作性。根据测区及像控点分布的实际情况,设计了四种像控点布设方案。
(1)方案1采用正规布点法,即四周均匀布设。该方案共布设16个平高控制点作为基本定向点(X1,X2,…,X16),其余点位为检查点。三角形所示为基本定向点,圆形为检查点(下同),如图2所示。

图2 四周边均匀布点
(2)“Z”形布点法。方案2中平高点(X1,X2,…,X16,X18,X20,X22,X24,X26,X28,X30)为基本定向点,其余点为检查点,如图3所示。

图3 “Z”形布点
(3)“S”形布点法。方案3-1布设8个平高控制点作为基本定向点(X1,X4,X5,X8,X9,X12,X13,X16),其余为检查点,如图4所示。方案3-2布设8平高控制点作为基本定向点(X2,X3,X6,X7,X10,X11,X14,X15),其余为检查点,如图5所示。
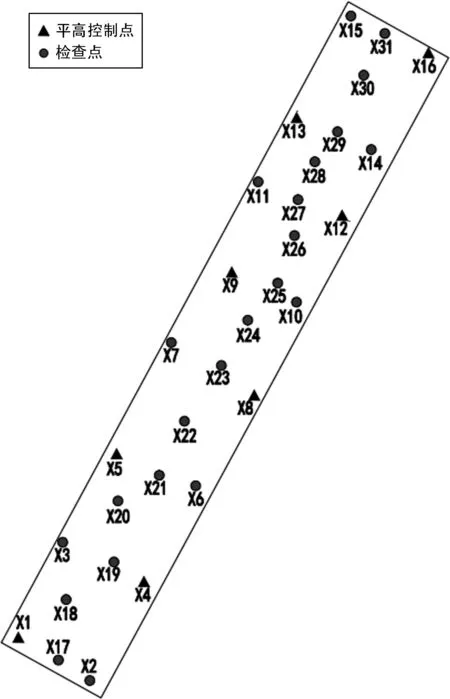
图4 “S”形布点1
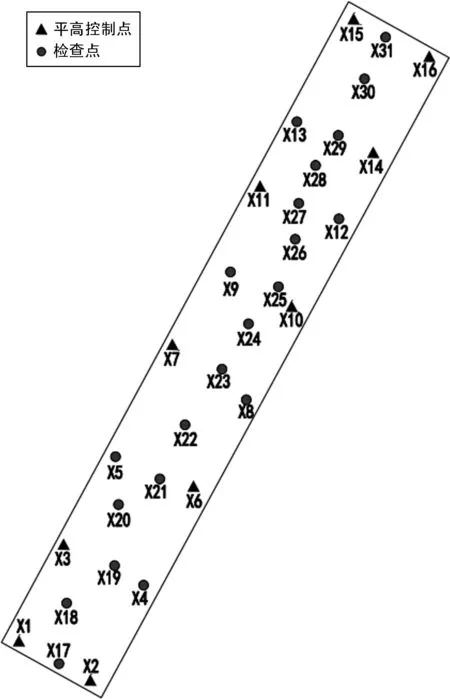
图5 “S”形布点2
(4)采用四角单点和内部“S”形布点法结合的方式,方案4-1采用了四个角点(X1,X2,X15,X16)加上控制点(X3,X6,X7,X10,X11,X14),其余点为检查点,如图6所示。方案4-2采用四个角点(X1,X2,X15,X16)加上控制点(X4,X5,X8,X9,X12,X13),其余点为检查点,如图7所示。

图6 四角单点和内部“S”形布点1
3.3 各方案精度对比与分析
通过上述4种不同的控制点布设方案,对其相应的中误差精度指标进行统计,如表1所示。中误差是反映数学精度的一个重要指标,计算公式为
(1)
式中,Δ为量的真误差;n为观测值;m为中误差。
通过表1各种不同控制点布设方案实验结果统计对比,我们可以得出:
(1)精度最弱点位于区域四周,区域内部精度相对较高且均匀,所以要加强区域四周控制点布设,尤其是区域网四角点。

图7 四角单点和内部“S”形布点2
(2)增加像控点数量,可以提高空三精度,但并非越多越好,过多的控制点不仅会增加内业刺点外业布点的工作量,而且像控点分布达到一定密度之后再增加数量对于空三精度提高并没有太多的作用,实用性比不高。
(3)方案4与其他方案相比减少了像控点布设数量,空三精度结果满足1∶1 000的数字化成图,且可以避免测区部分区域因为野外地形交通等原因造成像控点不方便布设的不利因素。

表1 不同像控点布设方案光束法区域网平差统计结果对比
4 结束语
本文提出了一种适合大型河道类测绘项目长条带状区域的无人机航测布点方案,即采用四角单点和内部“S”形布点法结合的方式,通过对4种典型的适用于无人机航测的均匀布点方案进行试验分析,表明本文提出方案得到的空三精度相当,控制点实施简单且数量少,可以为相关工程提供参考。
猜你喜欢
山东煤炭科技(2022年6期)2022-07-14
区域治理(2021年34期)2022-01-01
河北地质(2021年4期)2021-03-08
哈尔滨理工大学学报(2020年6期)2020-05-27
中国铁道科学(2019年5期)2019-10-19
资源节约与环保(2019年7期)2019-01-22
测绘通报(2018年10期)2018-11-02
中小企业管理与科技·下旬刊(2017年7期)2017-08-24
科技创新与应用(2017年4期)2017-03-27
湖南城市学院学报(自然科学版)(2016年2期)2016-12-01
