多准则模糊关联的机械产品关键元动作识别
2022-11-03 11:43李雪萍
工程设计学报 2022年5期
李雪萍,冉 琰
(重庆大学机械传动国家重点实验室,重庆 400044)
复杂机械产品是由一系列零件经过装配构成的。不同零件在实现产品功能的过程中扮演着不同角色,发挥不同作用。正确识别关键零件能有效节省设计、制造和研发成本,提高产品可靠性[1-2]。近几年来,产品的功能随着人们需求的变化而扩展,产品功能更加强大,结构更加复杂,零件数目更加庞大。产品零件之间存在的不确定性耦合关系,给产品设计工程师确定关键零件带来困难。许多学者对关键零件的识别方法进行了有意义的探索。比如:郏维强等[3]从零件间的功能关联关系、联接关联关系和物理关联关系等三方面对零件间的多关联关系进行融合,解决了零件间信息缺失或信息模糊的问题;郝丽等[4]利用粗糙集理论从拓扑结构和零件自身属性两方面评价关键功能子装配零件的重要度;Belhagj等[5]将装配体分解为包含少量零件的子装配实体,从组成实体的零件数、零件体积和零件边界面数等方面进行评价,得到各零件在该子装配体中的重要度;Han等[6]通过两级评价模型评价装配体零件的重要性,对关键功能零件的重要度进行排序,并在功能部件的基础上基于广度有限搜索算法识别关键组件的结构;袁博[7]结合复杂网络相关理论,将机械产品的装配关系与零件的失效风险相结合,运用节点重要度的计算方法分析在机械产品装配过程中零件的重要度;李冬英等[8-9]提出了元动作理论,对关键元动作识别的研究建立了一定基础;柯磊[10]基于模糊PageRank算法,通过考虑不同元动作之间的物理结构关系分析具有相邻关系元动作之间的状态影响度,并将对故障元动作状态影响最大的元动作单元作为关键元动作单元;Chen等[11]结合数值矩阵量化了元动作之间的耦合关系,根据故障传递特征并结合全局风险影响因素,实现了对元动作风险临界性的综合评估。
上述研究为提升机械产品的质量和可靠性奠定了基础。但是,现阶段对机械产品关键单元的识别还存在以下关键问题须进一步解决。
1)机械产品关键零件识别时忽略了零件之间的耦合关系。在不确定性条件下,零件间的耦合作用对整机的影响不可忽视,而其在传统的关键单元识别中并未得以体现,且现有机械产品零件数量众多,直接对零件进行分析也会加大研究的工作量。
2)在实际工作过程中机械产品通过运动单元传递动力和运动而实现其关键功能,传统的关键单元识别只考虑了结构的影响,并未从单元之间相互运动的角度予以考虑,导致最终识别的结果存在遗漏。
针对以上问题,本文提出了一种基于元动作间模糊关联关系的关键元动作识别方法。利用“功能—运动—动作(fuction-montion-action,FMA)”的分解方法将复杂机械产品分解至最小运动单元——元动作,并从元动作之间的运动和结构关系两个方面考虑元动作综合关联关系,提出基于模糊证据理论的元动作综合关联关系融合方法;结合三角模糊几何关系理论得到考虑综合关联关系的元动作重要度,并与未考虑综合关联关系的元动作重要度进行对比,来验证方法的有效性。
1 元动作
1.1 FMA结构层次分解
FMA结构层次分解是一种面向运动的机械产品分解方法,主要用于表达机械产品的功能、运动、动作与组成结构之间的关系[12-13]。通过FMA分解能获取机械产品的功能层、运动层、动作层以及单元组成结构。其中,在所有系统结构层中,动作层由基本和最小的动作组成,即在机械产品或系统中由传递动力和运动的元动作组成,不能进一步进行基于运动角度的划分,且只包含2种最简单的运动类型:移动和转动。通过FMA结构层次分解能够将机械产品的各个运动单元进行合理划分,并以可控可分析的最小粒度“元动作”为基础,来识别元动作之间的耦合关系,从而具体分析机械产品的薄弱运动单元。FMA结构层次分解过程如图1所示。

图1 FMA结构层次分解过程Fig.1 FMA structure hierarchical decomposition process
1.2 元动作单元
在机械产品中,单个零件无法完成规定的运动。因此,为了保证元动作能够正常传递动力和运动,将零件按照装配关系组成的能够实现元动作正常运行且在结构上不可再分的统一整体确定为元动作单元。根据各装配零件在元动作运动过程中的不同作用,将组成元动作单元的不同零件分为输入件、中间件、输出件、支撑件和紧固件[14]。其具体的定义如表1所示。

表1 元动作单元组成零件的分类及定义Table 1 Classification and definition of components of meta-action unit
力和力矩是元动作运动状态改变的原因。因此,任意元动作实现运动都须依靠输入件接收外部的动力和运动,并通过中间件传递给输出件,从而改变元动作运动参数。同时,为了保障元动作的运动性能满足要求,支撑件和紧固件也起着至关重要的作用。故将上述五类零件按照一定的装配关系构成完整的元动作单元,如图2所示。

图2 元动作单元结构示意Fig.2 Schematic of meta-action unit structure
2 多准则模糊关联的关键元动作识别建模
针对传统识别关键单元的不足,本文提出一种基于元动作的关键运动单元识别方法。首先,根据FMA结构化分解方法对机械产品进行分解,得到元动作集合,并将其作为研究对象;其次,从运动关系和结构关系两个角度结合专家评价讨论元动作之间的关联关系,并建立模糊关系矩阵;然后,基于模糊证据理论对元动作之间的模糊关系进行定量分析,并融合不同准则下的元动作之间的关联信息;最后,基于获得的元动作之间的综合模糊关系结果计算元动作所占权重,并对其重要度进行排序,识别考虑综合关联关系的关键元动作。其具体流程如图3所示。
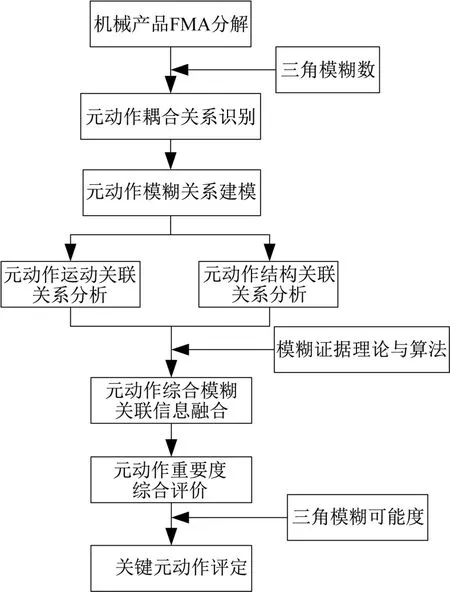
图3 关键元动作识别流程Fig.3 Key meta-action identification process
与传统的关键单元识别不同,传统的关键单元识别只从零件与结构关系进行,本文从运动角度对机械产品进行分解——FMA结构化分解。同时,针对领域内多专家评价时出现的信息不完整或信息缺失等问题,提出了用模糊证据理论推算来融合元动作之间的多准则关联关系,为后续对关键元动作的可靠性分析奠定基础。
2.1 元动作模糊关联分析
机械产品元动作之间的关联关系与零件之间的关联关系不同,其除了考虑结构间的相互影响,还要考虑运动关系的影响。一般来说,主要通过调研和专家经验来评估机械产品关键单元[15]。然而,当信息模糊或不完整时,专家无法用准确的数值表示他们的观点。本文利用三角模糊数与模糊语义之间的关系,将模糊数值转化为评价元动作之间模糊关联关系的输入。其中,任一三角模糊数可以表示为A=(Al,Am,Au),Al,Am,Au分别表示三角模糊元素中的最小值、最可能值和最大值。任意两个三角模糊数的加法运算公式为:

对于任意三角模糊数,其隶属度函数可以表示为:

建立不同三角模糊数与模糊语义的对应关系,并对其进行等级划分,如表2所示。

表2 三角模糊数与模糊语义的对应关系Table 2 Corresponding between triangular fuzzy numbers and fuzzy semantics
本文结合FMA结构化分解的特点,基于不同元动作之间的运动关联关系和结构关联关系,分析元动作之间的相关性,求解元动作之间的综合关联关系。
其中,元动作之间的运动关联性主要表示为元动作与运动层中同一运动的相关性,可以通过元动作之间的协同必要性或程度衡量。比如,为实现数控转台回转运动,蜗杆转动元动作和转台转动元动作缺一不可,可以认为它们之间具有很强的运动关联关系。元动作运动关联性的语义描述与三角模糊数的对应关系如表3所示。

表3 元动作运动关联性的语义描述与三角模糊数的对应关系Table 3 Corresponding relation between semantic description of meta-action motion relevance and triangular fuzzy number
元动作之间的结构关联关系主要表示为两元动作之间是否存在共用件,若存在共用件,共用件是否传递信息。比如,拉爪移动元动作和顶杆移动元动作共用拉钉和公锥活塞中间件,用于传递动力和运动,可以认为它们之间具有很强的结构关联关系。元动作结构关联性的语义描述与三角模糊数的对应关系如表4所示。

表4 元动作结构关联性的语义描述与三角模糊数的对应关系Table 4 Corresponding relationship between semantic description of meta-action structure relevance and triangular fuzzy number
2.2 元动作之间综合关联关系分析
分析元动作运动关联关系和结构关联关系之后,根据模糊证据理论对关联关系进行进一步融合。具体方法和步骤如下。



2.3 关键元动作识别
对元动作的模糊关联关系进行分析得到所需的评价结果后,还须进一步计算各元动作在该机械产品中的权重,并对其重要度进行排序,最终得到关键元动作。采用三角模糊数可能度关系的指标权重确定方法,实现对关键元动作的识别。该方法的具体步骤如下[17]:

3 实例分析
以国内某型号数控加工中心转台(以下简称数控转台)为例,进行其FMA结构化分解,并在此基础上完成对该转台关键元动作的识别。
3.1 转台FMA结构化分解
数控转台的结构如图4所示。
据数控转台“功能—运动—动作”的运动特性,利用FMA结构化分解得到6个元动作,如图5所示。每个元动作都是确保数控转台正常运行的最基本运动单元。

图5 数控转台FMA结构化分解Fig.5 FMA structural decomposition of NC turntable
3.2 数控转台元动作模糊关联分析
5位该领域内的专家分别从元动作之间的运动关联关系和结构关联关系进行评价,并构建各关联关系下的矩阵。不同关联关系所占权重通过层次分析法进行计算,得到元动作之间运动关联关系和结构关联关系的权重分别为:ωm=0.593,ωl=0.407,因此,得到元动作之间不同关联关系下5位专家的评价结果,如表5和表6所示。

表5 数控转台元动作之间运动关联关系评价结果Table 5 Evaluation results of motion association between NC turntable meta-actions

表6 数控转台元动作之间结构关联关系评价结果Table 6 Evaluation results of structural association between NC turntable meta-actions
根据式(10)至式(14)将元动作运动关联关系和结构关联关系下的评价结果进行融合,得到数控转台所有元动作之间的模糊关联关系,如表7所示。

表7 数控转台元动作之间综合关联关系评价结果Table 7 Evaluation results of comprehensive association between NC turntable meta-actions
3.3 数控转台关键元动作识别
根据表7对数控转台各元动作之间的综合关联关系进行去模糊化处理,并根据式(16)至式(18)可以得到数控转台各元动作所占权重结果:

在考虑运动和结构的综合关联关系下,数控转台元动作的重要度排序为:wA4>wA3>wA2>wA5=wA6>wA1。其中A4在数控转台所有元动作中所占权重最高,可以解释为:A4既与A1存在共用件,又与A2和A3对数控转台回转运动起着不可或缺的协同作用,还与A5和A6共用支撑件,因此,A4分配更高的权重是合理的。
此外,以本文提出的考虑模糊综合关联关系的元动作重要度排序结果与不考虑综合关联关系的重要度排序结果进行对比[18],结果如图6所示。

图6 数控转台元动作重要度对比Fig.6 Comparison of importance of NC turntable metaactions
由图6可知,考虑模糊综合关联关系的元动作重要度与不考虑综合关联关系的元动作重要度差异较大,不考虑关联关系的元动作重要度排序为:比如,在不考虑关联关系时A1排序第2,而在考虑关联关系时排序第6。可以解释为:在运动层,转台升降运动和转台的转动存在先后关系,这2条传动链的任一环节出问题,整机的功能将无法实现。不仅如此,A1和A4元动作共用上端齿盘,其分别作为中间件和输入件,均用于传递动力,且A1中的输出件(回转体)是A5和A6的支撑件,该作用也不可忽视。综上,元动作之间的综合关联关系对该元动作的重要度影响较大。因此,在识别机械产品关键元动作的过程中,为保证最终识别的关键元动作的完备性,应该将元动作之间的综合关联关系予以考虑。
4 结 论
1)针对机械产品元动作之间关联关系的确定问题,基于三角模糊数和模糊证据理论从元动作运动关系和结构关系的角度构建了具有不确定信息的多准则综合关联关系的模糊度量,有效解决了领域内多专家评价时出现的信息不完整或信息缺失等问题。下一步将在此基础上优化方法,分析不同元动作之间的关联性,并进行方法对比验证。
2)利用FMA分解得到最小运动单元——元动作,将其作为研究对象,有利于减轻研究工作量,并且将元动作运动关系作为影响重要度的因素,能够有效解决关联准则分析不完整的问题,也为下一步关键零件的分析奠定了基础。
3)以数控转台为例,对比验证了所提出方法的可行性。基于模糊关联分析实现了元动作关联关系作用下的关键元动作识别,有效解决了产品模糊信息转化和传递的问题,改善了由经验不足或精确知识缺乏带来的不确定。该方法还可以用于不同质量特性耦合关系的识别,以确定机械产品的关键质量特性。
猜你喜欢
中老年保健(2022年1期)2022-08-17
新世纪智能(数学备考)(2021年9期)2021-11-24
中学生数理化(高中版.高考理化)(2021年6期)2021-07-28
当代工人(2020年8期)2020-05-25
当代陕西(2019年15期)2019-09-02
学苑创造·A版(2018年11期)2018-02-01
小溪流(画刊)(2017年12期)2018-01-10
读者(2017年5期)2017-02-15
儿童故事画报·发现号趣味百科(2015年12期)2016-01-25
中国商人(2013年1期)2013-12-04