
基于博弈论的多无人机覆盖策略研究
2022-11-03 12:30谢祥洲罗一欣
电光与控制 2022年10期
谢祥洲, 谢 玲, 罗一欣
(1.电子科技大学机械与电气工程学院,成都 611000; 2.重庆城市管理职业学院,重庆 401000;3.吉林省教育学院,长春 130000)
0 引言
无人机(UAV)以其体积小、机动性强、通信成本低等特点在军事和民用领域得到了广泛应用,然而单架UAV往往不能满足复杂任务的需要[1-2]。为了解决这一问题,需要组建一个多UAV协作小组来提高效率,特别是在信息收集和处理方面,UAV之间的协作已成为UAV网络发展的关键技术之一[3-4]。
目前UAV研究热点主要集中在区域覆盖问题上,目的是使UAV更好地完成侦察、通信、测绘等任务[5]。文献[6]提出了一种无人机网络覆盖优化算法,通过对最少无人机节点数目和热点区域覆盖范围进行估计,并应用改进的布谷鸟算法重构优化目标函数,从而实现热点区域覆盖概率的重点优化;文献[7]提出了一种基于相对距离的无人机基站传感器网络部署方法,通过感知地面的未覆盖区域,以及覆盖边界或障碍物的位置实现按需覆盖,并在3个相对距离的影响下保持稳定的无线电覆盖,有效提高无人机网络覆盖效率。但上述方法难以最大程度地提高覆盖质量以及覆盖区域,并难以最小化发射功率,不能实现无人机辅助的无缝覆盖。文献[8]提出了一种基于飞行时间约束的无人机无线通信性能优化策略,通过使用最佳运输理论数学框架,提出了一种基于梯度的优化算法,用于根据用户的分布、飞行时间和无人机的位置对地理区域进行最佳划分,从而最大程度地提高覆盖质量、覆盖区域;文献[9]提出了一种用于无人机基站(UAV-BS)的最佳放置算法,在垂直和水平方向上解耦UAV-BS的部署问题,并将UAV-BS在水平维度上的部署建模为圆形放置问题,从而使用最小发射功率达到最大化用户覆盖数量;文献[10]提出一种无人机蜂群中紫外光隐秘通信能耗均衡路由算法,在保持UAV编队的基础上,根据无线紫外光散射通信的优点,在网络选择过程中结合通信链路损耗和节点剩余能量构建权值函数,从而平衡无人机蜂群节点的能耗,有效延长无人机蜂群的生命周期。但上述研究仅对发射功率进行了优化,未考虑无人机在推进过程中的能量消耗,与无人机网络通信的实际服务时间存在较大偏差,实用性较差。
为更好地解决在节能通信场景下UAV区域覆盖的问题,本文提出了一种基于博弈论的多无人机覆盖部署策略。
1 系统模型构建
图1所示为本文所探讨的多UAV合作覆盖示意图。对于任务单元i,假设某个给定UAVj的覆盖概率为qj,i,则采用软覆盖的概念计算网络中任务单元i的覆盖概率qi为qi=1-(1-q1,i)×(1-q2,i)×(1-q3,i),该式表明探测到的UAV越多,任务单元的覆盖概率qi越高。

图1 任务区多UAV覆盖示意图
考虑到天线增益和路径损耗等因素,如何准确地描述任务点的覆盖效用是一个值得思考的问题。本文建立了由多UAV组成的空对地网络,连续区域I∈R2被均匀地划分成离散单元。UAVn的状态定义为sn={ln,pn},其中,ln和pn分别表示UAVn的水平位置(xn,yn)和载波传输功率。假设固定翼UAV在固定的低空平台上水平飞行,UAV的定向天线波束宽度用θ表示,与均匀平面阵列(Uniform Planar Array,UPA)下的天线方向图相对应,从而得到了UAV的天线增益为
(1)
式中:Gm为主瓣增益;N0为天线元数。覆盖概率由路径损耗、位置、载波传输功率和环境等因素综合决定。此时,空对地通信的路径损耗LdB为
(2)
式中:n0为路径损耗指数;fc为UAV的载频;c为电磁波速度;di,n为UAVn与任务单元i之间的距离。
无线网络传输存在有视距和无视距链路。具体来说,UAVn的有视距概率表示为PLoS,n,而无视距概率表示为PNLoS,n。单架UAVn相对任务单元i覆盖概率qi(Sn)可表示为
(3)
式中:pn为UAVn的载机传输功率;pmin为成功检测时最小功率要求;μLoS,σLoS和μNLoS,σNLoS分别为有视距和无视距链路阴影衰减的均值和方差。
为了研究整个任务区的总覆盖率影响程度,本文引入了任务区重要性的概念。据此,任务单元i的UAV网络覆盖能力gi,N可表示为
(4)
式中:N表示无人机集合;σi表示任务单元i的重要性。因此,进一步推导出UAV全局覆盖效用U0为

(5)
载波传输能力和能量消耗是多UAV是否能完成任务的关键,受UAV通信能效设计的启发[11],UAV网络的总能量效率G0为
(6)
式中:τ为给定任务要求的覆盖阈值;G0表示覆盖效用的单位功率,G0值越高,表示传输功率越小,覆盖效用越高。因此,该模型可优化为寻找UAV的最优状态Sopt,即
P∶Sopt=arg maxG0。
(7)
2 合作博弈论框架
文献[12]中建立了一个小型网络集中分布式优化体系结构,并将物理小区网络映射为云中的虚拟决策网络,受该方案的启示,本文采用降维的方法来求解该模型。首先,将任务区的环境参数和所有UAV的位置、机载发射功率等信息报告给地面中心,由地面中心负责将UAV网络映射到虚拟决策网络;然后,设计了一种优化方法来解决该问题;最后,将得到的决策结果Sopt分发给UAV,它将根据Sopt调整载波传输功率并传输到指定位置。
2.1 降维求解过程
由于多维策略(位置和传输功率)的存在,求解问题P具有挑战性,通过将P划分为P1和P2来降低策略选择的复杂性,具体降维方法如下。

(8)

(9)
2.2 UAV覆盖最大化中的合作博弈
问题P1和P2是离散优化问题和NP-hard问题,传统集中式算法不能有效解决这些问题,特别是当任务单元的数量很大时更困难。为了应对这一挑战,本文采用博弈论这一有效的分布式多决策问题解决方法,来消除个体决定带来的相互影响。
在节能多UAV覆盖部署模型的博弈论框架中,覆盖问题被建模为R(N,{Sn,n∈N},{Un,n∈N}),其中,Sn为UAVn的状态。为方便起见,将位置ln和传输功率pn设置为S1,n和S2,n,即S1,n⊗S2,n=SnS,其中,S1,n和S2,n分别为ln和pn的集合,⊗表示笛卡尔积。UAVn的覆盖效用函数Un可以表示为Un=U1,n⊗U2,n,其中,U1,n和U2,n分别为覆盖最大化和功率控制的效用函数。
另外,sn,u1,n和u2,n分别表示Sn,U1,n和U2,n的一个单元。同时,将s-n定义为一组除了第n架UAV外的所有UAV的操作配置文件。因此,提出的节能型多UAV覆盖部署模型是一个合作博弈模型,在该模型中,参与者(UAVn)的效用属于网络中参与者和其他UAV的状态。
根据势博弈的基本定义,势博弈要求参与者在分布式多主体系统中进行合作控制,使每个参与者的局部效用与全局效用相互关联。以下定义用来分析所建立的博弈论框架的性质。
定义1(纳什均衡(NE))。
(10)
定义2(严格势博弈)。
对于效用函数u(sn,s-n),如果存在一个势函数φ,当任意策略的选择从sn变为s′n时,存在如下关系
μ(sn,s-n)-μ(s′n,s′-n)=φ(sn,s-n)-φ(s′n,s′-n)
(11)
那么这个博弈称为严格势博弈(Exact Potential Game,EPG),它至少有一个NE点。
在覆盖最大化阶段,假设该模型主要针对合作型UAV,那么存在重叠检测区域的UAV往往具有合作行为。
定义In为UAVn的可探测区域,若In∩Jn≠0,则Jn为UAVn的邻居的集合。同时定义J′n为经过n次新位置选择后的UAVn的新邻居。需要注意的是,所有UAV都有其最大的发射功率,覆盖最大化中基于合作覆盖博弈的效用函数为
(12)

G1:maxu1,n(Sn,SJn) ∀n∈N
(13)
式中,根据目标G1,UAVn的最优局部效用由其水平位置确定。
定理1将多UAV覆盖问题描述为一个合作覆盖博弈问题,参与者采用式(12)的效用函数。合作覆盖博弈G1是一个EPG,并至少有一个纯策略纳什均衡点。另外,覆盖最大化的最优解P1是G1的纯策略纳什均衡点。
证明 首先,将整个覆盖效用构造为势函数,即
(14)
假设任意一架UAVn的状态从sn变为s′n,则由个体策略选择引起的势函数变化如下
φe(Sn,S-n)-φe(S′n,S-n)=
(15)
直观地说,当UAV不在J1,n集合时,其完全不受上述策略变化的影响。那么式(15)中最后两项的结果等于零。此时,根据式(12)和式(15)可得
u1,n(sn,sJn)-u1,n(s′n,sJn)=φe(sn,s-n)-φe(s′n,s-n) 。
(16)
由式(16)可知,当任意UAV改变其行动策略时,其局部效用函数和势函数的变化值是相同的。由此证明了局部利他博弈G1是一个EPG,并且根据定义2具有至少一个纯策略纳什均衡点。而且,设计的势函数对全局覆盖都具有效用,它保证了每个参与者当前的局部效用与全局覆盖效用相互进行关联,因此P1的最优解变为G1的纯策略纳什均衡点。
2.3 UAV功率控制中的势博弈
从式(3)中可以看出,地面单元的覆盖概率不仅由UAV的位置决定,还与载波传输功率有关。图2为给定UAV地面任务单元的覆盖概率与发射功率之间的关系,从图2比较两个不同位置的UAV可知,地面单元的覆盖概率随着UAV发射功率增加而增加,且随着传输功率的增加,覆盖概率将一直接近峰值并逐渐平缓。
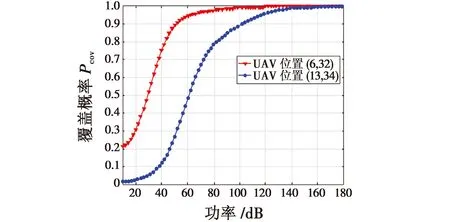
图2 覆盖概率随发射功率的变化
注意在当前固定的UAV部署下,一架UAV的功率选择会影响其可探测的任务区域单元的覆盖概率。因此,功率控制问题是一个潜在的博弈问题。为此构建了UAVn的个体效用函数,以捕获最优传输功率分配,即
(17)
式(17)表示UAVn在固定的最优位置下的最佳能效,其由UAVn的载波传输功率决定;在这个过程中,效用函数也满足势博弈的特点,其使每一架UAV的本地效用与全局效用相关联。式中,In为UAVn的探测区域。因此,设计的UAV功率控制模型可以建立一个势博弈模型目标,即
G2:maxu2,n(pn,p-n) ∀n∈N。
(18)
定理2针对UAV最优功率控制问题,以式(15)作为其单独效用函数,那么UAV势博弈G2是一个EPG,并至少有一个纳什均衡点。此外,问题P2的最优解是G2的纯策略纳什均衡点。
证明 首先能量效率效用可以表示为势函数,即
(19)
式中,对于任意传输功率选择从pn变为p′n,计算出的势函数变化如下

(20)
应该指出的是,任务区域不在UAV探测范围内,其完全不受上述策略变化的影响。因此可得
(21)
注意在式(20)和式(21)中,对于任一架UAVn,其势函数和个体效用函数之间的变化值与UAVn的变化一样,其传输功率策略可表示为
φ(pn,p-n)-φ(p′n,p-n)=u2,n(pn,p-n) -u2,n(p′n,p-n)。
(22)
由式(22)可以看出,G2是根据定义1得出的EPG,并且至少有一个纯策略纳什均衡点。另外,设计的势函数针对的是整个覆盖效用,它保证了每个参与的UAV的当前个体效用与整体覆盖效用相关联。因此,问题P2的最优解是G2的纯策略纳什均衡点。
2.4 空间自适应博弈的多UAV节能覆盖部署算法
由于多UAV节能覆盖部署问题被描述为一个EPG问题,因此需要应用学习算法来探索博弈的纳什均衡,以防止UAV策略陷入局部最优状态。基于空间自适应博弈(Spatial Adaptive Play,SAP)的多UAV节能覆盖部署算法的实现过程如下。
算法1:基于SAP的多无人机节能覆盖部署算法。
目标:在覆盖效用限制下最大限度地减少工作功率建立UAV状态剖面的参数,Sn={ln,pn},n∈N,和任务区域I的状态(σ),设置合理的迭代次数。
/*步骤1:在最大载波传输功率下的最大覆盖部署*/
While:未达到预定的最大迭代次数 do
随机选择一架UAVj,将其工作功率调至最大。
从受约束位置S1,n中选择一个位置状态lj(t),产生sj(t)的变化。
选定的UAVj计算任务区域的当前本地覆盖效用u1,j(sj(t),sJj(t))和期望效用u1,j(s′j(t),sJj(t))
UAVj根据式(23)选择一个状态,并更新其状态sj(t+1)。
t=t+1。
End while
计算当前UAV网络的全局覆盖效用U0,如果U0>τ,则保存并利用UAV更新后的状态数据Sn,将Sn输入到以下算法中;否则,结束程序并返回。
/*步骤2:在最大覆盖下的最优功率控制*/
While:未达到预定的最大迭代次数 do
在每次迭代中随机选择一架UAVn。
所有其他UAV重复先前的功率选择,即pk(t+1)=pk(t),k∈Jn。
为选择UAVn,计算其效用函数
u2,n(p′n(t),p-n(t)),不同功率选择p′n∈S2,n/pn,以及电流效用函数u2,n(pn(t),p-n(t)) 。
UAVn根据式(24)更新其功率选择策略。t=t+1。
End While
二进制对数线性学习被证明能保证收敛到最优纳什均衡,用于探索UAV的最优覆盖部署[13]。UAV的行动选择概率函数为
(23)
式中,t表示迭代次数。考虑到多智能体决策的复杂性,采用了一种分布式学习算法用于功率控制。因此,采用空间自适应博弈方法可将传输功率收敛到稳定的分配状态,UAVn的功率选择概率函数为
qn(t)=
(24)
式中,β为学习参数,β>0。
3 实验结果与分析
本章将进行模拟实验以评估所提出方法的有效性。实验中,将UAV通信网络的载波频率设置为2000 MHz,其中,μLoS=1 dB,μNLoS=20 dB,n0=2.5。此外,假设每架UAV都配备了16根天线,即N0=16。考虑到四旋翼UAV的实际需求[13],设置了一些合理的离散传输功率选择,即pn∈{32,34,36,38,40,42,44,46,48,50}(单位为dBm),n∈N。另外,设置覆盖阈值τ=0.6,即在不确定策略下的全局覆盖效用必须大于或等于0.6以满足通信要求,根据算法设计模拟过程将其分为两个步骤进行计算。
3.1 覆盖效用分析
假设任务区的信息已知,在此将任务区统一划分为50×50个单元(每个单元的长度为200 m),任务区的设计概率密度函数服从正态分布。图3所示为不同的UAV数量时的全局覆盖效用U0的变化。当部署5架或更多UAV时,结果可以最终收敛到稳定状态。但当部署4架UAV时,覆盖概率小于0.6,不能满足通信需求,无法进行功率控制。

图3 不同的UAV数量时的总覆盖效用
3.2 基于SAP算法最优覆盖部署分析
前文的计算都是在UAV的数量预先给定的情况下进行的,为了更好地评价所提出方法的效果,将UAV的数量设置为8来验证仿真的有效性,结果见图4。

图4 8架无人机最优覆盖部署
图4(a)为8架UAV在最大载波传输功率下最优覆盖部署的覆盖概率分布图。从图中可以看出,单架UAV离某一特定区域越近,其覆盖性能就越高,而且UAV重叠检测区域的颜色较深,表明多UAV协同检测可以提高检测概率。同时,如果没有紧密部署不同类型的UAV,会导致覆盖效用不足。图4(b)是计算全局覆盖效用U0的收敛性随着迭代次数的变化。为了消除偶然性影响,本文在步骤1中进行了10次计算(见图4(b)中opt.1~opt.10)。从图4(b)中曲线可以看出,总覆盖效用总会收敛到某个特定值,该结果表明此方法至少存在一个纳什均衡点。
3.3 基于SAP算法的最优功率控制分析
由于仿真结果满足通信要求,接下来对UAV高效节能的输电功率分配进行了研究。从图4(b)的放大图中可以看出,选择算法中执行步骤2得到的第10条曲线,其结果也收敛于一个稳定的解τ=0.6。这表明根据上述理论分析,提出的SAP算法可以将结果收敛到纳什均衡点。图5(a)给出了最优部署下最优功率控制覆盖概率分布图。同时,图5(b)给出了UAV发射功率选择的收敛状态,其中每条曲线代表UAV选择的不同发射功率。从图5(b)可以看出,在大约110次迭代之后,每条曲线都收敛于稳定状态,证明了提出的功率控制方法至少有一个纳什均衡点。

图5 SAP算法的最优功率控制分析
图6为所有UAV的传输功率收敛情况,图7为迭代过程中UAV总能量效率G0的变化情况。图6和图7的结果说明了SAP算法的正确性、有效性和收敛性。更重要的是,在探索最优功率选择策略以使UAV网络总能量效率最大化的同时,UAV的总传输功率也趋向于收敛到最小的结果。

图6 所有UAV载波传输功率的收敛图

图7 在迭代过程中UAV总能量效率的变化
4 结论
针对UAV协同覆盖和节能通信技术方面存在的问题,本文提出了一种基于博弈论的多UAV覆盖部署策略,通过计算得到如下结论:
1) 通过准确描述UAV之间的协作关系,构建了一个多UAV协同覆盖部署模型,通过仿真模拟实验验证了该方法的有效性和模型的可靠性;
2) 采用集中分布式优化体系结构,将多维策略问题分为覆盖最大化和功率控制两个步骤,并采用基于空间自适应博弈的多UAV节能覆盖部署算法证明了纳什均衡点的存在;
3) 通过引入能量效率,构建了UAV覆盖场景来解决能量短缺问题,可使覆盖场景更加可靠和有效,在实际的多UAV协同通信场景中具有很大的应用潜力。
猜你喜欢
新作文·高中版(2021年5期)2021-08-23
锦绣·中旬刊(2021年3期)2021-07-14
舰船科学技术(2021年12期)2021-03-29
锦绣·中旬刊(2021年8期)2021-03-15
中国药学药品知识仓库(2021年18期)2021-02-28
商情(2019年1期)2019-03-18
中学生数理化·八年级物理人教版(2016年5期)2016-08-26
中学生数理化·八年级物理人教版(2016年5期)2016-08-26
意林·作文素材(2015年14期)2015-08-26
新高考·高一物理(2015年3期)2015-08-20
