频控阵雷达技术研究进展综述
2022-11-01 10:12王文钦张顺生
雷达学报 2022年5期
王文钦 张顺生
①(电子科技大学信息与通信工程学院 成都 611731)
②(电子科技大学电子科学技术研究院 成都 611731)
1 引言
Antonik等人[1,2]在2006年IEEE雷达年会中,首次提出频控阵(Frequency Diverse Array,FDA)雷达技术概念。同时,美国和英国涌现出一系列频控阵雷达相关的研究文献[3-7],包括发明专利[8-10]和多篇博、硕学位论文[11-18]。本文第一作者2010-2011年在美国学术访问期间关注到美国空军研究实验室在频控阵雷达方面的相关研究,便开始研究频控阵在雷达、通信和电子对抗等方向应用方面的研究[19-23],并在《电子信息学报》和《雷达学报》发表综述文章[24,25]。2017年,本文第一作者与雷达领域的4位IEEE Fellow在IEEE Journal of Selected Topics Signal Processing组织出版专刊“Time/frequency modulated array signal processing”[26]。随后,国内外涌现出一系列有关频控阵雷达的研究文献[27-30],包括方向图综合[31-50]、目标参数估计[51-59]、干扰与抗干扰[60-64]和目标检测[65-69]等方面。
尽管如此,当前频控阵雷达技术研究依然面临一些质疑和误解:(1)频控阵与常规的相控阵、多输入多输出(Multiple-Input Multiple-Output,MIMO)、步进频和正交频分复用(Orthogonal Frequency Diversion Multiplexing,OFDM)等的本质差异与关系是什么?(2)频控阵雷达的应用优势和工程实用性到底如何?(3)频控阵发射波束的时变性是优点,还是缺点?(4)频控阵雷达波束具有距离与角度耦合性带来的目标参数估计模糊问题如何解决?为此,本文试图回复上述质疑和误解问题,并探讨与展望频控阵雷达的技术发展趋势。
2 频控阵雷达的概念、差异与机理
2.1 频控阵概念与内涵
实际上,Antonik等人[1,2]提出的频控阵雷达概念只是在相控阵雷达基础上对不同阵元的中心载频附加一个远小于发射信号带宽(MHz~GHz量级)的频偏(kHz量级),而且与相控阵雷达一样地各阵元采用相同的基带波形。也就是说,早期的频控阵雷达是属于相控阵雷达范畴的一种相干发射雷达技术体制,而不是采用正交波形的非相干MIMO雷达技术体制。频控阵雷达与MIMO雷达、OFDM雷达和步进频雷达的差异主要体现在:MIMO雷达采用非相干发射波形来增加发射空间自由度,OFDM雷达采用相互正交的子载波而频控阵各阵元发射信号不一定正交;步进频雷达的步进频信号间的频谱不重叠,而频控阵雷达每个阵元发射频谱重叠的相干基带波形。
近年来,为了避免频控阵雷达面临的距离维与角度维耦合问题,出现了将频控阵与MIMO相结合的FDA-MIMO雷达[6,21,70],但这些FDA-MIMO雷达本质上属于MIMO雷达,而不是相控阵雷达范畴,因为其各阵元采用正交的非相干基带波形,而不是相同的相干波形。为了避免混淆,本文将频控阵雷达分为相干频控阵雷达和非相干频控阵(FDAMIMO)雷达两种。表1[71]给出了频控阵雷达与几种相似雷达技术的比较。由于频控阵雷达与相控阵雷达一样采用相干发射信号,因而具有发射阵列合成增益。同时,频控阵雷达的阵元间频偏会带来发射阵列方向图具有距离依赖性;FDA-MIMO雷达与MIMO雷达一样采用正交基带波形,所以他们均缺失发射阵列增益,但FDA-MIMO雷达由于各天线间存在载频偏差,会引起发射-接收方向图具有距离依赖性,而MIMO雷达则没有距离依赖性。因此,与频控阵雷达具有相似物理特性的是相控阵雷达,而不是MIMO雷达。需要说明的是,频控阵(FDA)雷达和频控阵-MIMO(FDA-MIMO)雷达的主要差异在于前者采用相同基带波形,而后者采用正交基带波形。相干频控阵和非相干FDA-MIMO这两种频控阵雷达均可看作一种空、时、频多维捷变雷达技术,因而都具有空、时、频多维度抗干扰和目标距离、角度和多普勒等多维参数联合估计应用潜力。

表1 频控阵雷达与几种相似雷达技术比较Tab.1 Comparison between FDA radar and several similar radar technologies
为了阐述频控阵雷达与常规相控阵雷达、MIMO雷达和FDA-MIMO雷达的差异与关系,本文考虑如图1所示的普适性多功能一体化阵列雷达架构,它能够统一和兼容相控阵、频控阵、MIMO和FDAMIMO等不同雷达模式,即可通过选择不同的阵元波形和频偏来实现不同的雷达工作模式:

图1 普适性多功能一体化阵列雷达示意图Fig.1 Schematic diagram of general multi-function integrated array radar
(1) 当全部频偏等于零,即Δf0=Δf1=...=ΔfM-1=0,且发射基带波形相同,即ϕ0(t)=ϕ1(t)=...=ϕM-1(t),为相控阵雷达;

(5) 当只有一个阵元,即M=1时,退化为基本的单天线雷达。
由于采用正交波形的非相干频控阵雷达,即FDA-MIMO雷达,属于MIMO雷达体制,可利用波形正交性通过匹配滤波就可实现雷达回波信号的分离。但是,FDA-MIMO雷达发射波束并不具有自动扫描能力,也不能产生“S形”弯曲的发射阵列增益方向图(其MIMO发射决定其各发射阵元是全向发射,没有发射波束合成效应,但是发射-接收联合波束方向图会出现“S形”),而且也面临常规MIMO雷达技术中存在的“难以产生多个具有大时间-带宽积的正交波形”和“缺少发射阵列增益”等瓶颈问题。同时,需要注意的是,美国空军研究实验室提出频控阵雷达概念技术的主要动机就是发射波束的自动扫描特性和距离依赖性。
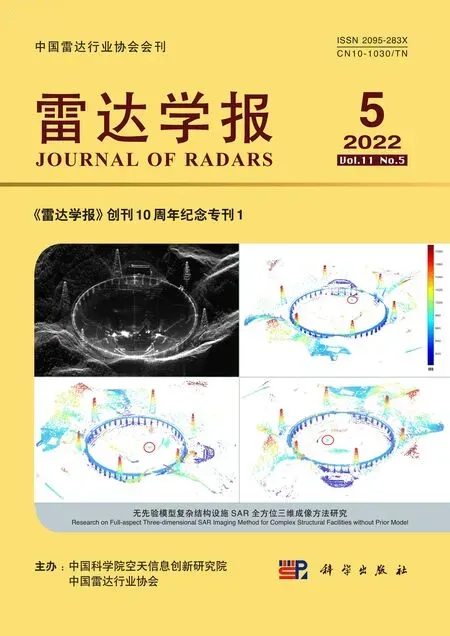
为了进一步分析相干频控阵雷达和非相干FDAMIMO雷达的差异性,不失一般性,考虑M阵元线阵相干频控阵雷达,其基带波形为ϕ(t),第1个阵元的发射中心载频为f0,而第m个阵元的发射中心载频为fm=f0+m·Δf,Δf即为相邻两个阵元之间的中心载频差,并作窄带假设,则经目标反射后的回波信号可表征为[72]
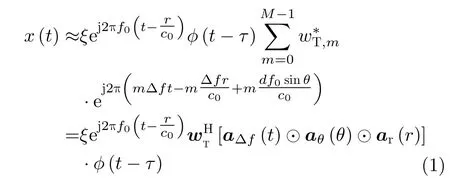
其中,r和τ分别代表双程传播距离和双程时延,θ为方位角,(·)*为 共轭符号,ξ代表目标反射系数,wT为发射阵列加权向量,其元素为wT,m,(·)H为共轭转置符号,而发射阵列导向矢量aΔf(t),aθ(θ)和ar(r)可分别表示为
其中,(·)T为转置符号。对接收信号x(t)用 e-j2πf0t进行频率下变频,并采用参考信号为基带波形ϕ(t)的传统常规匹配滤波,则有

其中,Tp为脉冲积累时间。
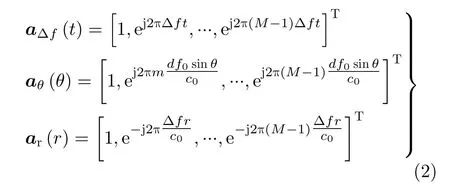
考虑向量aΔf(t)中 的元素ej2πmΔft,令v=µ-τ,则有[72]
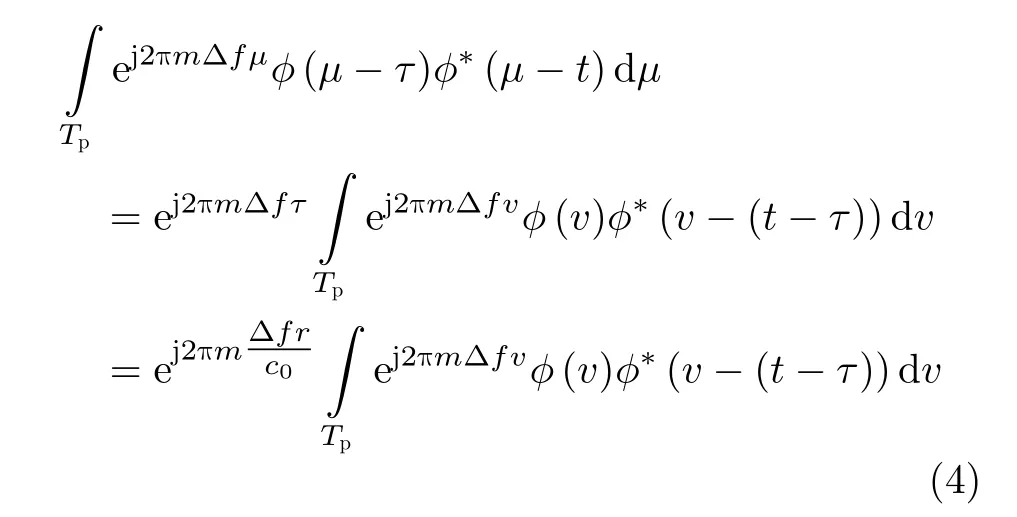
由基带信号ϕ(t)的模糊函数定义

其中,tr和fd分别代表相对时延和多普勒频移。因此,当t=τ时,式(4)可简化为
将式(4)和式(6)代入式(3),则式(6)中的ej2πmΔfr/c0将 会和式(3)中向量ar(r)的 元素e-j2πmΔfr/c0相抵消,所以式(3)对目标(即t=τ)的匹配滤波输出结果为

其 中,γFDA=[χ(0,0),χ(0,Δf),...,χ(0,(M -1)·Δf)]T。也就是说,这种常规的匹配滤波方法产生的ej2πmΔfr/c0因 子会抵消与距离相关的导向矢量ar(r)中的 e-j2πmΔfr/c0,从而导致并不能实现目标的距离与角度联合估计,所以说一些频控阵雷达文献中直接假设通过常规匹配滤波能保留距离相关的导向矢量ar(r)其实是错误的。为了解决这个问题,文献[72]提出一种考虑频控阵时变性的多通道匹配滤波处理方法,文献[73]也提出一种针对相干频率分集阵雷达的匹配滤波器设计方法。
2.2 相干频控阵雷达的时变机理及其影响
由于相干频控阵的阵列方向图具有距离-方位角耦合性和时变性,所以在频控阵方向图综合和波束形成方面涌现出不少论文[74],但不少文献采用时变或随机频偏来抑制频控阵波束的时变性问题,甚至一些文献还研究了“时不变”聚焦波束综合设计方法[31,33-35,75]。但是,这些文献要求天线辐射出去的空间传播信号频率还能够时变地自由调整变化,这是不可实现的,所以一些文献也对频控阵“时不变”波束综合技术进行了质疑和评述[76-80]。实际上,即使设计出时变的频偏,电磁波信号从天线辐射出去后将保持辐射时刻的频率而不再变化(这里不包括多普勒效应引起的频移),所以频控阵波束主瓣并不能在某一距离位置长时间停留,而是会随电磁波的传播方向不断向前传播。因此,现有文献中的“时不变”频控阵方向图只是在某一瞬时的天线远场区域辐射能量分布图,并不能解决频控阵方向图随时间变化的问题,因而时不变的频控阵方向图是不可实现的。
需要说明的是,“时变性”和“耦合性”是频控阵雷达技术的本质属性,如果消除“时变性”和“耦合性”,则会导致频控阵雷达变成传统的相控阵雷达或MIMO雷达,相应地也会失去频控阵雷达的自身优势,所以本文作者认为频控阵雷达波束的时变性和耦合性并不一定是一种缺点,而可能是一种优点。为此,这里进一步对频控阵雷达波束时变性带来的波束自动扫描特性和阵列增益影响作简要分析。
2.2.1 发射波束自动扫描
不失一般性,假设对发射阵列进行均匀加权,则相干频控阵雷达的发射阵列方向图可表示为[27]

其峰值处需满足条件c0Δf ·t-Δf ·r+f0dsinθ+Δf ·dsinθ=c0i,i=0,1,2,...,相应的波束角度扫描速率为

则相干频控阵雷达在脉冲持续时间内Tp的波束扫描角度范围为

这意味着频控阵雷达发射波束能够在一个脉冲持续时间Tp内完成角度维的空域自动扫描。图2给出了频控阵雷达发射波束的脉内与脉间自动扫描特性,其仿真参数为:f0=10 GHz,M=16和半波长阵元间距。当Tp·Δf ≪1时,其脉内扫描可以忽略,但脉间扫描变化不可忽略;当Tp=2(f0+Δf)d/c0Δf时,可实现单脉冲时间内完成180°方位角自动扫描。可以预见,频控阵雷达波束的扫描速度可以通过调整频偏 Δf来调整,即使采用非线性或随机频偏,其波束的自动扫描时变性依然存在,只是不再具有规律性。
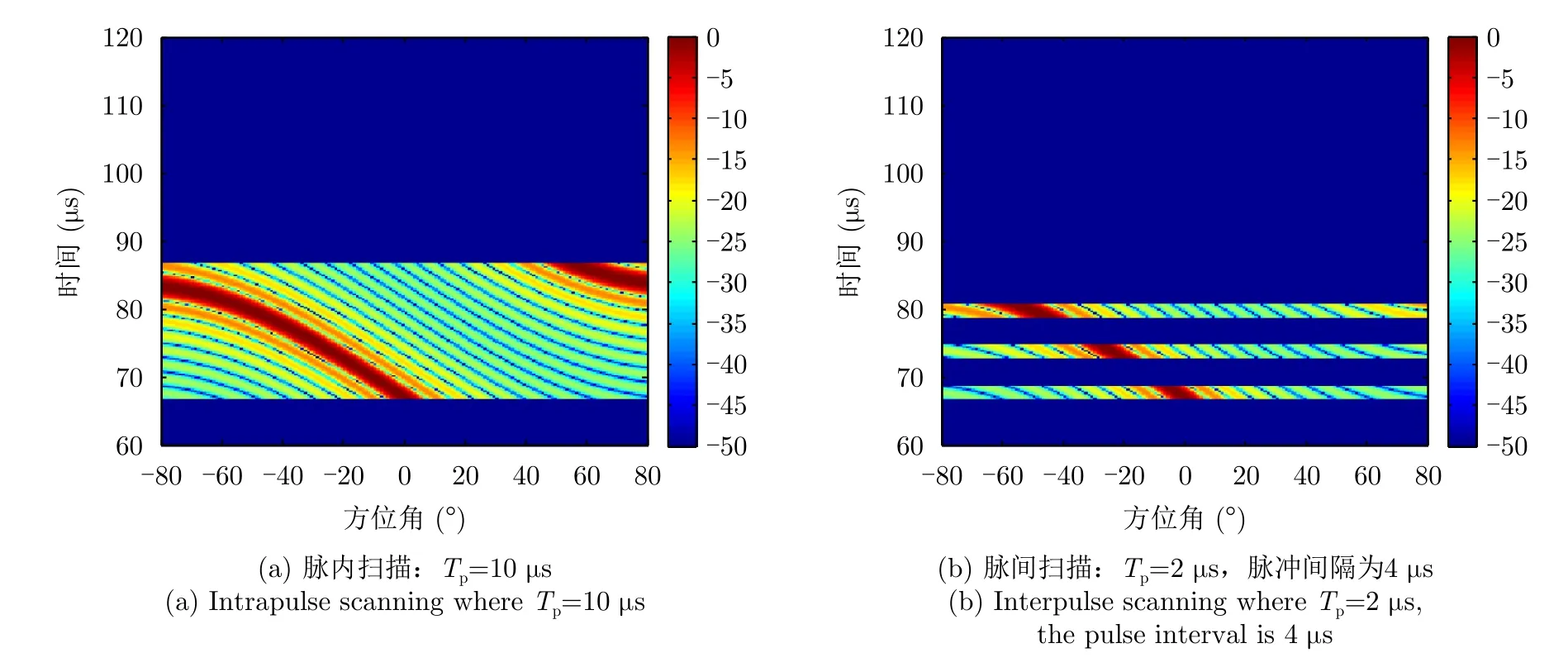
图2 频控阵雷达发射波束的脉内与脉间自动扫描特性Fig.2 Intrapulse and interpulse automatic scanning characteristics of transmitted beam of FDA radar
2.2.2 阵列增益影响
由于频控阵雷达发射波束具有自动扫描性和时变性,为了定量评估其发射阵列增益,本文定义如下的方位角度维阵列积分增益:

其中,RFDA为频控阵雷达第m个和第m′个阵元发射信号的协方差矩阵,即

可以证明,I PFDA(θ)等效于瞬时波束式(8)对时间t积分后的方位角关联项,因而称之为阵列积分增益。当频偏 Δf远远小于基带信号带宽时,有此时I PFDA(θ)退化为常规的相控阵发射波束图。如图3所示,随着频偏 Δf的增大,频控阵雷达发射信号的去相关效应会越发明显,导致波束图宽度变宽,当频偏 Δf大于基带信号带宽出现各阵元发射信号频谱不重叠时,有[RFDA]m,m′=0,∀mm′,则退化为全向辐射的常规MIMO雷达发射波束图,失去发射阵列增益。

图3 频控阵雷达发射波束的方位维阵列积分增益,其中 Bs为基地信号带宽Fig.3 Integral array gain of FDA transmitter in azimuth,where Bs is the baseband bandwidth
3 频控阵在雷达干扰与抗干扰中的应用
3.1 频控阵雷达抗主瓣干扰应用
主瓣干扰抑制是当前雷达应用中面临的一个技术难题,相控阵雷达能够有效抑制旁瓣干扰,但不能抑制主瓣干扰。由于频控阵阵列因子包含角度和距离二维参数,这为从角度维和距离维二维联合抑制主瓣干扰创造了条件,所以频控阵雷达抗主瓣干扰应用受到广泛研究、关注[81-90]。
频控阵雷达能够抗主瓣干扰的主要理论机理在于其发射和接收空间频率:
文献讨论是培养科研能力、激发灵感的重要方法之一。教师应要求每组就所读论文,通过多媒体向所有学生讲解,时间在15~20分钟。汇报的提纲与读书笔记大致相同。由汇报者解答教师和同学的提问,由教师引导学生进行讨论。在实际操作中,可以选取部分阅读成绩优秀者进行汇报。

其中,r为双程距离。由于频偏 Δf引起的频控阵雷达发射空间频率会与传统相控阵雷达的发射空间频率不同,所以频控阵雷达的目标与主瓣干扰(噪声压制干扰和欺骗干扰)会出现不同的发射-接收联合空间频率分布特性,如图4所示,从而可实现抗主瓣干扰应用。

图4 频控阵雷达的发射-接收空间频率分布示意图Fig.4 Illustration of FDA radar transmit-receive spatial frequency distribution
但是,需要注意的是:(1)频控阵雷达能够抑制主瓣干扰,但它自身并不能鉴别干扰;(2)由于频控阵雷达目标响应存在角度和距离耦合问题,往往采用频控阵与MIMO相结合的FDA-MIMO解决方案,但并不是唯一的解决思路。
利用本文作者团队研制的频控阵雷达,图5给出了频控阵雷达采集的实测数据干扰抑制前的信号功率谱,其中包含一个目标,一个主瓣干扰和两个旁瓣干扰。该干扰抑制方法先利用阻塞矩阵方法从距离维抑制主瓣干扰,再利用投影矩阵重构方法对目标主瓣进行保形处理,从而既能实现主瓣干扰抑制,也能保证目标主瓣不畸变。更多细节见文献[91]。图6(a)为通过目标协方差矩阵和干扰协方差矩阵之后,在接收端通过MVDR得到的距离-方位角二维波束图,可以看出在主瓣干扰处形成了零陷,其干扰抑制比大于3 dB。图6(b)为接收波束形成之后的信号功率谱,其中干扰已经被抑制,相比干扰抑制前,输出SINR提升约20 dB。

图5 频控阵雷达外场试验数据干扰抑制前信号功率谱Fig.5 Power spectra of FDA radar real data before interference suppression
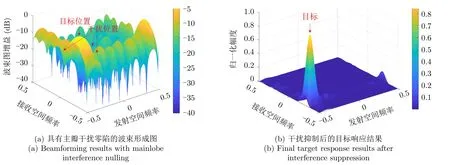
图6 基于实测数据处理的频控阵雷达主瓣干扰抑制结果Fig.6 FDA radar mainlobe interference suppression results of FDA radar in real experimental data
3.2 基于频控阵的雷达干扰应用
频控阵不仅可应用于雷达抗干扰,还可应用于干扰雷达[92-97]。这是因为频控阵的发射频率分集特性具有天然的欺骗干扰能力,并不需要对频控阵发射信号进行复杂调制,便可对敌方雷达在距离向维度产生多假目标的欺骗干扰效果,而且将频控阵与间歇采样调制相结合还可实现距离-方位向二维干扰效果。因此,相比只能产生少量假目标的传统相控阵干扰机,频控阵调制干扰机可以大大提升假目标的数量,并可通过调整干扰参数改变假目标的数量和位置,形成数量众多的集群假目标,从而造成敌方雷达目标识别饱和,达到欺骗干扰目的。
为了进一步利用频控阵干扰机多载频和多阵元带来的自由度,以产生更加复杂的干扰效果,可以采用基于频控阵的二维散射波欺骗干扰技术,并使干扰信号在脉内和脉间均与雷达信号相干,以便利用雷达信号处理增益来提升干扰效果。关于频控阵二维散射波欺骗干扰的更多细节可参考文献[96],而转发干扰主要有两种实现方式,即同时收发双工模式和分时收发单工模式。前者对硬件系统要求较高,后者对硬件要求较低,但延迟较高。慢时间间歇采样可较好地解决转发式干扰机的收发隔离问题,而且也能在方位向产生假目标欺骗干扰效果。
文献[97]提出一种基于频控阵空时频调制的慢时间间歇采样干扰合成孔径雷达成像方法。如图7所示,频控阵慢时间间歇采样转发干扰的主要思路也是在慢时间域内对雷达信号进行间歇采样并转发,当干扰机截获到雷达信号便对雷达脉冲信号在慢时间域进行高保真周期采样,如图7所示。这些信号被送入频控阵发射阵列,每个阵元赋予不同的载频频偏,等效将间歇采样后的干扰信号复制对应M个阵元的M份,再通过天线发射到需要保护的目标区域形成散射波干扰。

图7 频控阵慢时间间歇采样干扰信号的产生流程图Fig.7 Flowchart of FDA-based intermittent sampling jamming in slow-time dimension
理想的间歇采样信号可视为矩形包络的脉冲串:

其中,*为卷积符号,Ts和Tf分别表示采样脉冲宽度和采样周期,而且采样脉冲宽度一般大于雷达信号脉冲宽度。假设截获的雷达信号为s(tr,ta),其中tr为快时间,ta为慢时间,则经间歇采样后的干扰为sJ(tr,ta)=pJ(ta)·s(tr,ta)。不失一般性,假设雷达采样脉宽为Tp和调频斜率为kr,并考虑K个散射点,则经过目标散射后进入雷达接收机的干扰信号可表示为

其中,Rk为第k个散射点的斜距,采用de-chirp方法对接收到的干扰信号进行逆合成孔径雷达成像处理可得

其中,ai为 由间歇采样引入的幅度加权系数,fdk为第k个散射点对应的多普勒频率,fa为方位频率,Bs为信号带宽,ΔRk为第k个散射点相对成像参考距离的斜距。式(16)表明,频控阵干扰机不仅能在距离维产生干扰目标,而且也能在方位维产生干扰目标,这种数量众多的假目标能够大大增加对敌方雷达的识别难度和迷惑性。
假设仿真参数如下:中心载频f0=10 GHz、带宽Bs=500 MHz、脉宽Tp=1 µs、脉冲重复频率2000 Hz、目标转动角速度0.03 rad/s和频偏Δf=500 kHz,图8仿真比较了同等条件下相控阵干扰机和频控阵干扰机对ISAR成像的干扰效果。可以看出,相比于只能产生一维假目标的相控阵干扰,频控阵干扰可以大大提升假目标的数量,并可以通过调整干扰参数改变假目标的数量和位置,从而形成假目标数量众多的集群假目标。本团队也通过外场试验证实频控阵干扰机能够对敌方雷达目标探测进行有效干扰,如图9所示。图9(a)为试验场景布置图,其中布放了1个角反射器作为雷达测试目标,而转发式干扰机采用8阵元的频控阵发射天线;图9(b)的被干扰雷达实测回波数据结果表明:对于只有1个角反射器目标的测试场景,却接收输出8个转发式欺骗目标回波信号,即可大大增加转发式干扰机产生假目标的数目。

图8 相控阵干扰机与频控阵干扰机对逆合成孔径雷达成像的干扰效果比较Fig.8 Comparison of jamming effects of PA jammer and FDA jammer on ISAR imaging

图9 作者团队的频控阵干扰机试验现场及其干扰实测结果Fig.9 FDA radar jamming experiments and measurement results carried out by the author’s team
4 频控阵在雷达运动目标检测中的应用
随着高速平台雷达应用的日益广泛,平台运动速度的提高会导致中/低脉冲重复频率雷达出现多普勒模糊现象,可采用高脉冲重复频率来解决,但这又会引起距离模糊问题。传统相控阵雷达的空间频率只与角度有关,不能分辨不同模糊区域的杂波,而且常规补偿方法在距离模糊情况下的性能会急剧恶化甚至失效[98,99]。但是,频控阵雷达的空间频率具有距离依赖性,能够提供额外的距离维自由度,所以频控阵在雷达距离模糊杂波抑制和盲速目标检测方面具有应用优势。
4.1 频控阵雷达距离模糊杂波抑制
无论是正侧视阵还是前视阵雷达工作模式,频控阵雷达在解决距离模糊杂波抑制方面均相比相控阵雷达有明显优势。以正侧视频控阵雷达为例,考虑两个方位角θ和俯仰角ϕ相同,但距离r1和r2不同的散射块,其空间频率分别为[100]

两个散射块的空间频率之差为

这说明频控阵雷达的距离模糊杂波相对距离会出现与频偏Δf相关的偏移,而传统相控阵雷达(Δf=0)则没有偏移。Wang等人[101]分析了存在距离模糊情况下的FDA-MIMO雷达杂波阶数特性。
由于频控阵雷达的距离依赖性会导致杂波不再满足独立同分布条件,需要采用二次距离依赖补偿(Secondary Range-Dependent Compensation,SRDC)方法对杂波谱进行补偿。经过SRDC补偿后,正侧视频控阵雷达不同距离单元的杂波谱分布会相同,且不同模糊区域的杂波谱可完全分离;但前视频控阵雷达的杂波谱分布在空-时二维平面不会完全相同,但不同模糊区的杂波会分开。同时,在无模糊区域,不同距离单元杂波谱分布差异较大,距离依赖性强,但模糊区域杂波的距离依赖性会相对较弱。因此,前视频控阵雷达还有必要对杂波谱进行二次补偿,可采用的补偿方法包括多普勒补偿法、导数更新法和俯仰角正切值导数更新法等。此外,Gui等人[87]提出一种针对非相干频控阵雷达的主瓣距离模糊杂波抑制方法。除将距离模糊的杂波在发射角-接收角-多普勒联合域进行分离,并对不同模糊数杂波补偿之外,还针对多个目标探测应用场景,利用LCMV方法进行信号过滤及杂波抑制,其理论分析和数值仿真验证了该方法的有效性。
频控阵雷达增加了距离维和时间维的自由度,但全空时自适应处理复杂度会很高,而且对样本距离单元个数的要求较高,需要采取降维处理。因子分析(Factor Analysis,FA)是一种常见的阵列降维方法,又称1DT方法,其主要思路是在多普勒维只选取目标所在的多普勒通道进行处理,先在每个空域通道对回波信号进行多普勒滤波,然后对选取的多普勒通道进行空时自适应滤波。扩展FA (Extended Factor Analysis,EFA)方法则在多普勒维选取m个通道,当m=3和m=5时分别称为3DT和5DT方法,它们在空域上保留所有通道的输出,并对每个空域通道进行多普勒滤波。关于频控阵雷达距离模糊杂波抑制算法推导与理论分析可参见文献[102]。
例如,假设载频10 GHz、频偏7 kHz、收发阵元均为4个、平台高度3 km、平台速度90 m/s、最大无模糊距离10 km和杂噪比30 dB,图10比较了频控阵雷达在存在距离模糊情况下不同降维方法的改善因子。由于频控阵雷达的杂波特征值较多,只选取一个多普勒通道(即1DT方法)难以实现较好的杂波抑制性能,但选取3个多普勒通道(3DT方法)并结合SRDC补偿则可明显改善杂波抑制性能。同理,采用5个多普勒通道(5DT方法)并结合SRDC补偿可实现更窄的改善因子。因此,1DT方法在时域不能自适应滤波,虽然运算量小,但杂波抑制能力一般;3DT和5DT方法均能降低计算复杂度,而且杂波抑制能力也优于全空时自适应处理方法。5DT的性能更优,但其复杂度也更高,所以3DT更适合频控阵雷达降维处理。

图10 频控阵雷达模糊杂波抑制的改善因子比较Fig.10 Comparison of improvement factors for FDA radar ambiguous clutter suppression
雷达在探测运动目标时,目标的径向速度越大,则越有利于检测目标;反之,径向速度越小,则越难以检测目标。因此,最小可检测速度(Minimum Detectable Velocity,MDV)是动目标显示雷达的一个核心指标。如果运动目标的速度低于MDV,该目标就会被杂波淹没而不能被可靠检测,所以MDV主要受杂波限制。也就是说,MDV主要取决于信杂比和信干比(Signal-to-Interference Ratio,SIR)损失,也称改善因子,而SIR损失通常定义为动目标显示滤波器输出信杂比和输入信杂比的比值。因此,MDV通常定义为靠近杂波凹口的目标速度,而MDV对应的绝对或归一化多普勒频移便是最小可检测多普勒(Minimum Detectable Doppler,MDD)。如图11所示,参数为载频10 GHz、N=M=16、脉冲重复频率15 kHz、信号带宽10 MHz、频偏100 kHz、快拍数10、平台速度90 m/s和最大无模糊距离10 km。其4个坐标位置分别代表相控阵(PA)雷达和FDA-MIMO雷达正和负的最小可检测多普勒频移,它们直接对应该雷达的最小可检测速度,所以频控阵雷达具有远优于相控阵雷达的最小可检测速度(最小可检测多普勒)能力。

图11 频控阵雷达与相控阵雷达的SIR损失比较Fig.11 Comparison of SIR loss between FDA radar and PA radar
4.2 频控阵雷达盲速目标检测
对于频控阵雷达,除了自身载频f0对应的多普勒频移,其阵元频偏还会引起附加的多普勒频偏(等效于扩展了常规多普勒频移)。Xu等人[65]指出,如果忽略频控阵雷达频偏带来的多普勒扩展效应,会导致目标在空-时-距出现散焦现象。当运动目标的初始距离和杂波距离相同时,忽略多普勒效应会导致该目标无法被检测到;当运动目标和杂波相距较远时,忽略多普勒扩展又会引起额外的信杂比损失。如图12所示,发射阵元20个、接收阵元8个、中心载频2 GHz、带宽10 MHz、频偏10 MHz、脉冲重复频率10 kHz,脉冲数为8,其信杂噪比(Signalto-Clutter-plus-Noise Ratio,SCNR)损失表明随着目标多普勒频移的增加,考虑多普勒扩展(Doppler Spreading,DS)的频控阵雷达(FDA with DS)在盲多普勒频移处的SCNR损失会减小,而且能够检测到盲速目标,而忽略多普勒扩展则会导致SCNR损失增大。这是因为目标运动速度越高,忽略多普勒扩展带来的误差也会越大。
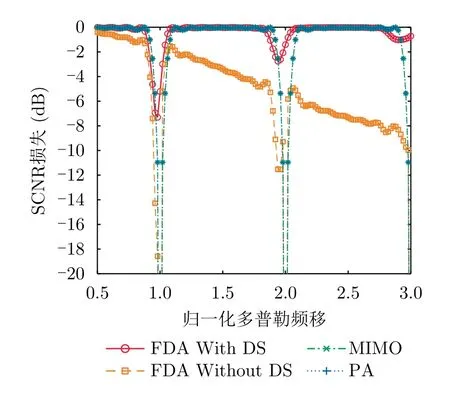
图12 频控阵雷达的SCNR损失因子比较Fig.12 Comparison of SCNR loss factors of FDA radar
杂波与噪声协方差矩阵估计是雷达运动目标检测的核心,但相干频控阵雷达的杂波与噪声协方差矩阵具有距离依赖性和时变特性,无法通过相邻距离单元的数据样本直接估计,但非相干频控阵雷达则可以通过邻近单元进行估计。相干频控阵雷达的杂波协方差矩阵估计可通过对邻距离单元的数据进行距离依赖性补偿来获得独立同分布的训练数据,但当频偏较大时也无法完全补偿杂波中的距离依赖性,且会导致发射信号的去相关效应。
实际上,可以利用频控阵雷达的多普勒扩展效应来提升盲速目标检测能力。采用参差脉冲重复频率是一种传统的盲速目标检测方法,但会增加相干多普勒处理难度,而频控阵雷达无需改变脉冲重复频率就可解决。文献[87]提出一种基于频控阵的雷达主瓣杂波抑制和盲速目标检测方法,其仿真结果表明频控阵雷达能够解决主瓣杂波中的盲速目标检测问题。
考虑如下场景:目标位于(10.002 km,17.2°),其他参数同图12。3个杂波源如图13(a)所示,分别位于(9.996 km,18.6°)、(10.003 km,18.6°)和(10.003 km,-21.5°),每个杂波源由20个散射微元组成,这些散射微元对应的复幅度为独立同分布的零均值复高斯随机变量。图13仿真比较了不同信噪比背景下的频控阵、MIMO和相控阵雷达检测概率。可见,考虑多普勒扩展的频控阵雷达检测性能最优,而忽略多普勒扩展会降低目标检测概率,但仍优于MIMO和相控阵雷达。
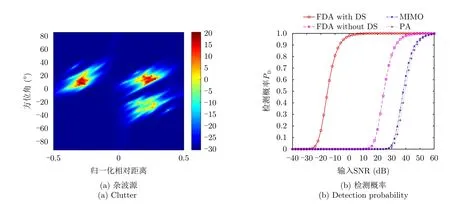
图13 频控阵雷达主瓣杂波抑制和盲速目标检测性能比较Fig.13 Performance comparison between mainlobe clutter suppression and blind target detection in FDA radar
5 频控阵在雷达定位欺骗中的应用
随着当前雷达对抗技术的迅猛发展,为了提升雷达生存能力,除了利用目标的雷达截面积缩减技术,射频隐身也是一个有效技术[103-105]。射频隐身的目的是对抗无源探测、跟踪和识别,以降低敌方无源探测装备的作用距离和跟踪精度,从而提升自身的突防、生存和作战效能,主要技术包括低截获概率、低可识别概率和低定位概率。雷达射频隐身则是减少自身系统的射频信号特征,使得无源定位系统难以截获雷达发射信号,从而难以对雷达进行侦测定位。当前研究中的雷达射频隐身技术主要通过功率控制、低旁瓣设计和波形设计等途径[106-109]降低被敌方无源探测装备成功定位和识别概率。不过,雷达射频隐身的矛盾在于:雷达需要利用射频辐射主动探测目标,但又要避免被敌方无源定位系统截获与定位。
雷达射频隐身技术往往要求天线主瓣波束窄和旁瓣峰值低,这就要求采用阵列天线,但现有射频隐身文献主要以相控阵为主。相控阵可灵活实现波束的空间扫描,但其阵列因子只与角度参数有关,所以相控阵射频隐身技术只能控制角度维的辐射特征,而不能在距离维和时间维同时进行辐射特征调整。实际上,雷达射频隐身也可通过破坏敌方电子系统的侦测、引导、转发等侦测与干扰环节,诱骗敌方电子系统偏离最佳工作状态。频控阵波束具有的距离-角度耦合性和时变性能大大增大敌方无源侦测系统的定位解算难度,并能导致其侦测结果出现严重偏差[22,110]。我们称频控阵发射信号具有的这种抗侦测特性为定位欺骗[111,112],即雷达辐射信号能够被无源探测系统侦收到,但无法通过有效的定位手段对雷达辐射信号进行准确定位[113]。基于此,我们曾提出一种基于频控阵的无源定位对抗技术[114]。
依据式(8),频控阵发射波束峰值处的等效指向角θa为

即频控阵雷达发射信号的方位角测量值具有频偏Δf、时间t和距离r依赖性,因而会给无源测向系统造成虚假测向结果,从而实现测向欺骗效果。同时,式(19)也表明频控阵发射信号的距离测量值也具有频偏 Δf、时间t和方位角θ依赖性,也会给无源测距系统带来虚假测距结果,造成测距欺骗效果。如图14所示,频控阵雷达发射信号的真实指向角θ和其测量指向角θa并不相等,其偏差依赖于频偏 Δf。

图14 频控阵雷达发射波束指向角与频偏有关联Fig.14 FDA transmitting beam direction angle has relation with the frequency offset
不失一般性,考虑N阵元干涉侦测仪,可得其对M阵元频控阵雷达发射信号的干涉侦测角度估计CRB[105]:

其中,ε(t)为 瞬时信噪比。这表明频偏 Δf可能会恶化干涉侦测仪对频控阵雷达发射信号的测向误差。图15比较了对相控阵辐射源和频控阵辐射源的干涉测相结果。可见,频控阵辐射源比相控阵辐射源的干涉测向具有更大的偏差,即频控阵比相控阵具有更好的定位欺骗性。图16给出的双星时频差定位(Geometic Dilution of Precision,GDOP)比较,也表明频控阵比相控阵具有更好的定位欺骗特性。
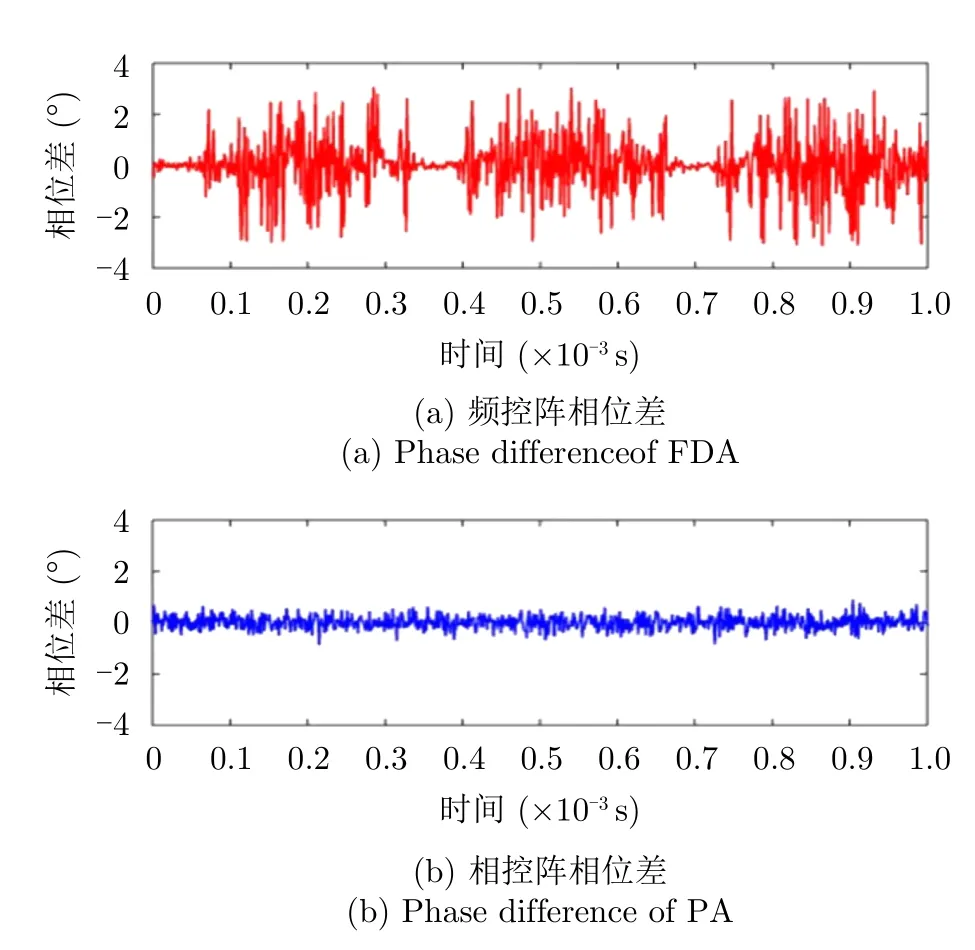
图15 对相控阵和频控阵辐射源干涉测向时的干涉相位比较Fig.15 Interferometric phase comparison of PA and FDA in passive direction finding

图16 相控阵和频控阵辐射源的GDOP结果对比Fig.16 Comparison of GDOP results between PA and FDA radiators
6 发展与展望
近年来频控阵雷达受到越来越广泛的研究关注,也涌现出大量研究文献,但目前依然存在诸多问题待研究解决:
(1) 相干频控阵雷达的时变性和相参化处理。由于非相干的FDA-MIMO雷达具有处理算法简单的优点,也不存在时变性问题,并能借鉴MIMO雷达中的相关处理方法,现有频控阵雷达研究文献大多都是考虑FDA-MIMO模式。但是,由于相干频控阵雷达存在时变性问题,如果直接采用传统的匹配滤波方法,会导致波形失配和距离信息抵消问题,相关的研究文献还较少。实际上,波束自动扫描和时变性是美国空军研究实验室提出频控阵技术的核心动机,所以时变性应该是频控阵雷达的优点,而不是缺点。如果频控阵雷达缺失时变性,就会退化为相控阵或MIMO雷达,相应地也会失去频控阵雷达的一些固有优点。基于此,我们应该研究如何利用频控阵雷达的时变性,而不是抑制或忽略其时变性。Gui等人[72]提出一种考虑时变影响的相干频控阵雷达接收机处理架构,该方法既适合非相干FDAMIMO雷达也适合具有频谱重叠的相干频控阵雷达,但不能解决小频偏相干频控阵雷达的相参化接收处理问题。Jones[16]提出针对频控阵雷达的全带接收机方法,主要采用多载波混频和窄带滤波器组相结合的解决思路,但该方法只考虑了非相干FDAMIMO雷达,并不适用于相干频控阵雷达。Cui等人[115]提出一种结合快速傅里叶变换和全带接收的频控阵雷达处理结构,但也不适用于具有小频偏的相干频控阵雷达。Xu等人[116]提出一种基于子脉冲匹配接收的距离-角度匹配接收机架构,Wang等人[117]提出基于分数阶傅里叶变换的频谱重叠模式频控阵雷达接收处理方法,但这些方法也不能解决小频偏相干频控阵雷达的相参化接收处理问题。
(2) 样机研制与试验验证。由于频控阵雷达技术还存在很多亟待解决的关键理论问题,当前的频控阵雷达研究主要还集中在理论研究和概念系统设计阶段,关于样机研制与试验验证的研究文献还很少。本团队在2017-2021年分别研制了L波段、X波段和Ku波段的3款频控阵雷达原理样机及其处理软件系统平台,如图17所示。西安电子科技大学也研制一款波形分集的FDA-MIMO雷达原理样机,如图18[30]所示。尽管如此,频控阵雷达在抗干扰、目标探测和定位欺骗等方面应用的可行性和有效性还有待开展大量试验测试与验证,所以工程化样机研制与试验验证具有重要意义。

图18 西安电子科技大学研制的频控阵雷达原理样机实物图Fig.18 FDA radar prototype developed by Xidian University
(3) 频控阵、相控阵与MIMO雷达的协同与融合。相控阵具有高定向增益,因而在抑制方位向干扰方面具有优势,但不能有效抑制主瓣干扰;MIMO雷达能增加系统自由度,并能抑制主瓣干扰,但实际应用中难以产生MIMO雷达所要求的多个大时间-带宽积波形;频控阵雷达能够从距离维抑制主瓣干扰,但存在距离-角度耦合问题。因此,实际应用中有必要采用频控阵、相控阵和MIMO雷达协同工作模式,但目前关于频控阵雷达协同应用的研究文献还很少。Wang等人[20]曾提出一种双脉冲频控阵与相控阵协同处理的目标距离、角度和多普勒等多维参数估计方法,Zhu等人[118]提出一种相控阵和FDA-MIMO合作式目标距离与角度联合估计方法,Gong等人[119]提出一种基于FDA-MIMO雷达的目标检测与低截获一体化设计方法。针对雷达抗干扰应用背景,图19给出了频控阵雷达和相控阵雷达分别在搜索阶段和跟踪阶段时的协同抗干扰策略。在搜索阶段,以频控阵雷达模式为主,主要利用频控阵发射波束的自动扫描特性进行观测空域的快速目标搜索,并利用辅助的相控阵雷达模式下估计的干扰角度信息,联合进行主瓣和副瓣干扰抑制。在跟踪锁定阶段,则以相控阵雷达模式为主进行角度维副瓣干扰抑制和目标角度估计,再利用辅助的频控阵雷达模式进一步从距离维抑制主瓣干扰。

图19 面向主瓣/副瓣干扰抑制的频控阵和相控阵雷达协同工作模式Fig.19 Cooperative operation mode between FDA and PA radar for mainlobe and sidelobe interference suppression
(4) 空-时-距多维联合处理。频控阵雷达目标响应具有空、时、频等多维度信息,而且能够在距离和方位维度进行自适应干扰抑制,所以频控阵雷达可以采用空-时-距多维联合处理,但由于频控阵雷达的阵列因子具有距离、角度和时间依赖性,很难得到有效的噪声与干扰/杂波协方差矩阵。频控阵雷达回波的非平稳特性,导致可用的快拍数据非常有限,可能不足以保证协方差矩阵估计算法收敛,所以协方差矩阵高效估计是频控阵雷达信号处理的关键技术之一[120]。一种可能的解决方法是采用投影近似和快速幂迭代等子空间跟踪算法[121]。Higgins[122]提出一种迭代最小均方误差算法,该算法能够同时适应慢时间和快时间,并能通过抑制多普勒和距离旁瓣来提高灵敏度,但其多维自适应处理带来的计算复杂度很高。Wen等人[123]提出一种针对慢时间FDA-MIMO雷达的空时自适应处理方法,并进而提出一种基于张量分析的FDA-MIMO雷达参数估计方法[124]。此外,Jang等人[125]提出一种单快拍FDA-MIMO雷达定位方法。
(5) 认知频控阵雷达。相比于相控阵雷达和MIMO雷达主要考虑方位角和多普勒频移问题,频控阵雷达还多了距离和时间维信息,所以频控阵具有的空、时、频和波形等多维自由度可以赋予认知雷达更高的系统自由度和更丰富的目标信息。文献[126]提出一种非线性调频信号和空域编码的FDA雷达波形设计方法。目前已有一些认知频控阵雷达文献[56,127-129],但主要还是侧重波形优化和频偏设计,而关于认知频控阵雷达目标探测与跟踪方面的研究文献还很少,存在诸多亟待解决的核心问题。
7 结语
本文简要地分析了频控阵雷达技术的概念、内涵与外延,梳理了近5年来国内外关于频控阵雷达技术及其应用方面的最新研究进展,论述了频控阵雷达干扰与抗主瓣干扰、杂波抑制与盲速运动目标检测及其定位欺骗方面的应用优势,并指出目前亟待解决的几个关键研究问题,包括相干频控阵雷达的时变性和相参化处理、样机研制与试验验证、频控阵与相控阵雷达协同、空-时-距多维联合处理和认知频控阵雷达等。虽然目前频控阵雷达技术方面依然面临诸多难题,但我们相信在这方面进行进一步的深入研究是值得的。
猜你喜欢
科学与信息化(2021年30期)2021-12-24
煤气与热力(2021年3期)2021-06-09
化工管理(2021年7期)2021-05-13
成都信息工程大学学报(2021年6期)2021-02-12
舰船科学技术(2020年3期)2020-04-22
通信技术(2019年3期)2019-05-31
电子制作(2019年24期)2019-02-23
现代防御技术(2016年1期)2016-06-01
西北工业大学学报(2015年3期)2015-12-14
遥测遥控(2015年2期)2015-04-23