
基于离散元的履带板旋转挤压水田土壤过程分析
2022-10-31 10:35孙恒辉宿宁钱山黄伟
农业装备与车辆工程 2022年7期
孙恒辉,宿宁,钱山,黄伟
(230031 安徽省 合肥市 中国科学院 合肥物质科学研究院)
0 引言
拖拉机在水田或水洼低地上行走和作业时,由于此类土壤水分过大、土壤坚实度小而导致拖拉机轮子或履带的打滑和下陷。打滑和下陷增大了拖拉机的行驶阻力,增加了燃油消耗,严重时可造成拖拉机无法行走作业,降低了水田环境下拖拉机的作业效率[1-2]。
拖拉机所能发挥牵引力的大小,取决于履带对土壤的摩擦和履刺对土壤的挤压和剪切[3]。土壤的微观变化可以在很大程度影响农业机械的操作与性能[4-5]。履带板在驱动轮的带动下发生转动和平动。目前大多数研究集中于分析平动时履带板在荷载作用下带动软地面发生整体的剪切,然而在履带板平动挤压土壤之前,履带板发生转动切入水田土壤时,水田土壤就已经开始受挤压并在水平侧方向(Y 轴方向)有滑移的趋向,给履带板平动时的推进力分析带来了扰动。改变履带板的结构参数是提高履带式拖拉机牵引力的一种有效手段[6]。为进一步提高水田拖拉机和机械的作业效率,有必要细化研究履带板旋转挤压水田土壤时土壤产生的反作用力(推进力)和土壤滑移的过程,分析履带板与水田土壤相互作用的变化规律和影响因素,优化履带板触土部分结构。
土壤是一种典型的不连续的离散物质,在受力变形过程中,土壤以颗粒群的形式发生变形和运动。离散单元法(Distinct Element Method,DEM)是一种分析离散物质散体行为的方法,能够直观地观察到土壤颗粒群的运动趋势。土壤的破裂变形和土壤颗粒的流动采用离散元分析显然比连续体理论更适合[7]。国内外很多学者利用离散单元法对土壤静、动态行为进行研究,取得了重要的研究成果[8-11]。
本文应用离散元法建立履带板发生转动切入水田土壤时履带板与土壤相互作用的三维仿真模型,以不同履带板结构和切土速度作为边界条件,分析了不同条件下水田土壤在水平侧方向(Y 轴方向)产生的滑移和履带板的受力。土壤颗粒的滑移位移代表土壤对履带板后续平动运动的干扰,而履带板所受的力可视为土壤对拖拉机的推进力。仿真结果曲线有助于对水田土壤条件下的履带板结构和尺寸、行驶速度等因素进行优化,为增加水田拖拉机的驱动力、提高通过性能提供技术支持。
1 离散元模型与边界条件
水田表层土壤在拖拉机下地耕作期间是饱和的,通过直观观察,静置状态下水田土壤可分为水、泥浆和土壤3 层[12],因此所建立的离散元模型涉及水和土壤2 种物质的混合作用,本文按文献[13-14]记录的方法对水田土壤建立离散元模型。
1.1 仿真前提条件
通过以下假设和方法,对履带板发生转动切入水田土壤时履带板与土壤相互作用的过程进行仿真,以保证计算结果接近实际工作情况,对相关样机试验的开展有一定的理论指导。
(1)泥浆的结构成分复杂,其物理特性参数使用虚拟试验标定法确定[13-14],泥浆内部水和土壤颗粒之间的相互作用参照文献[13-15]确定;
(2)泥浆中含水量较高,粘滞力远小于普通土壤。Hertz-Mindlin with JKR 模型通过分析两颗粒之间内聚力的方法,将模型中游离的颗粒连接起来,在一定程度上模拟水田土壤颗粒之间的粘滞力。
(3)实际作业中,水田拖拉机的单个履带板挤压水田土壤的时间非常短,达到毫秒级。本文将在此阶段履带板与水田土壤的相互作用放在一个相对独立的子系统里研究,此时履带板的运动不会有明显的偏移,而水田土壤对履带板的影响很小,可忽略不计。
(4)水田土壤的建模包括设置上层水分子、中间泥浆和下层土壤3 种颗粒,模仿了自然界中水分子真实渗透土壤颗粒的方式,最终形成和实际情况类似的水、泥浆和带有少量水分土壤的3 层结构。
1.2 仿真模型
将几何形状和大小尺寸设计好的某型履带板和代表受挤压土壤变化区域的土槽模型导入离散元仿真软件,建立的仿真模型如图1 所示。图1 中,颗粒的三维运动方向:X 方向为履带板前进方向;Y 方向指向履带板运动方向的侧面;Z 方向垂直于土壤表面。仿真中坐标系为右手坐标系。

图1 仿真模型示意图Fig.1 Diagram of simulation model
由于仿真中颗粒数量和尺寸受计算机硬件条件限制,结合实际设置水分子直径为0.5 mm,泥水颗粒半径1 mm,土壤颗粒半径5 mm,土槽尺寸(长×宽×高)为0.60 m×0.35 m×0.20 m。
按前述假设条件和方法,加载水分子和土壤颗粒,静止生成包含水、泥浆和带有少量水分土壤3 层结构的水田土壤,设置某型履带板的线速度及角速度。仿真中涉及的所有参数见文献[13-17]。
1.3 计算结果记录
为分析不同位置的土壤颗粒在履带板旋转挤压作用下的受力和运动差异,分析其受力运动的变化规律和影响因素,在履带板及其履刺不同部位的正下方选择5 个土壤颗粒断层作为数据采样点,其相对位置见图2。
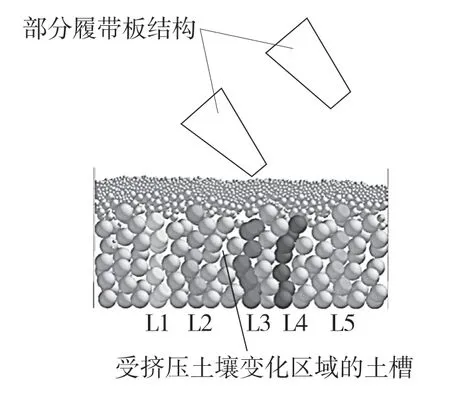
图2 5 个土壤颗粒断层位置示意图Fig.2 Diagram of five soil particle faults
2 履带板运动与仿真结果
2.1 履带板的几何尺寸
某型单块履带板几何形状和尺寸如图3 所示,履带板横向宽度为B,纵向长度为l,节距为p,履齿接地部分为梯形齿,梯形齿顶高为h,顶部宽度为b1,梯形齿底部宽度为b2。

图3 履带板几何形状与尺寸示意图Fig.3 Diagram of geometric shape and dimensions of track pad
2.2 履带板旋转挤压土壤的过程
仔细观察实际拖拉机行驶时履带板直线切入和旋转挤压土壤的过程,该过程可以具体分为如图4 所示的几个阶段。图4(a)表示履带板在切入土壤前的状态,其与土壤表面间的夹角φ即为履带安装的导向角,在驱动轮的带动下,履带板以速度v 和角度φ向水田土壤运动;图4(b)表示履带板在位置A 的直线处与土壤发生碰撞;图4(c)表示在接触到土壤的瞬间,履带板绕碰撞轴线发生转动速度为ω的旋转运动。夹角φ即为履带板的切土角,速度v 即为履带板的直线切土速度,转动速度ω为履带板的旋转切土速度。

图4 履带板转动切入土壤过程示意图Fig.4 Diagram of track pad cutting into soil by rotation
2.3 仿真结果
设置如表1 所示的参数值开展仿真计算。图5显示了符合履带板旋转挤压土壤实际过程的几个关键步骤的仿真情况。
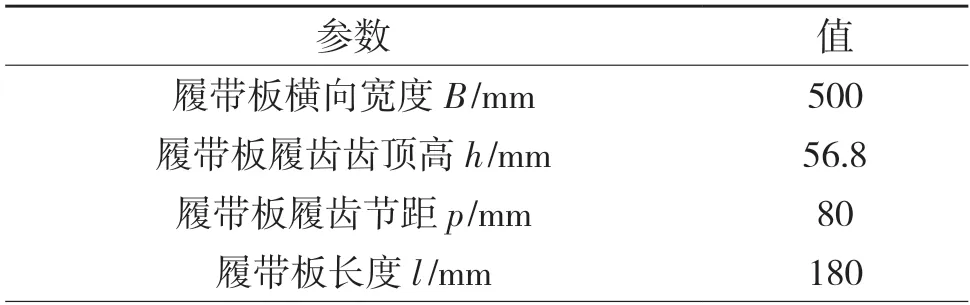
表1 履带板的几何尺寸和运动参数Tab.1 Geometric dimensions and kinematic parameters of track pad

(续表)

图5 履带板转动切入土壤过程的仿真示意图Fig.5 Simulation diagram of track pad turning and cutting into soil
图5 中,最小的颗粒表示水分子,稍大的颗粒表示泥浆颗粒,最大的颗粒表示土壤颗粒。履带板切入土壤前水分子自然渗透土壤颗粒的分层图如图5(a)所示,模拟了包含水、泥浆和带有少量水分土壤3 层结构的静止状态下的水田土壤;图5(b)表示了履带板以夹角φ和速度v 切入水田土壤时,首先与水层发生碰撞时水分子颗粒发生泼溅的运动状况;图5(c)表示了履带板在接触到土壤后,履带板绕碰撞轴线发生转动速度为ω的旋转运动时,土壤颗粒受力变形和发生位移的情况。
在上述过程中履带板的受力变化情况如图6 所示。结合图4—图6 可以看出,履带板在初始接触土壤时受到的土壤颗粒反作用力很小,随着履带板逐步旋转挤压土壤,履带板受到的反作用力逐渐增大,当履带板运动至与地面平行时,履带板受到的反作用力达到最大值。

图6 履带板的受力曲线图Fig.6 Stress curve of track pad
履带板旋转挤压土壤的过程中,L1~L5 五个断层的土壤颗粒发生水平侧方向(沿Y 轴方向)滑移的位移示意图如图7 所示,其中横坐标表示仿真计算运行的时间,横坐标从0.8 s 开始表明履带板在从静止开始运动0.8 s 后才与水田土壤接触并开始旋转运动,且断层L1的土壤颗粒沿水平侧方向(Y轴方向)的滑移位移最大。

图7 各断层观察面的土壤颗粒沿水平侧方向(Y 轴方向)发生的位移曲线图Fig.7 Displacement curve of soil particles along horizontal direction (Y-axis direction) of each fault observation surface
3 结果与讨论
从图7 中可以看到,断层L1 的土壤颗粒沿水平侧方向(Y 轴方向)的滑移位移最大,因此在分析不同履带板结构和切土速度影响水田土壤沿水平侧方向(沿Y 轴方向)滑移和履带板受力的过程中,选择这一层的土壤颗粒的滑移位移大小和履带板的受力大小作为优化履带板结构尺寸和行驶速度的指标。土壤颗粒的滑移位移大小代表土壤对履带板后续平动运动的干扰,而履带板的受力大小可视为土壤对拖拉机的推进力。
不同履带板结构和切土速度是比较常用的、具有代表性的几种变量因素,其值见表2。

表2 变量因素表Tab.2 Variable factors
如图8 所示,组合4 条件下履带板受力大于组合3 条件下履带板的受力,说明履齿节距相对越大则履带板的受力越大。组合3 条件下履带板受力稍大于组合1 条件下履带板的受力,组合3 条件的履齿节距小于组合1 条件的履齿节距,但组合3 条件的履齿高度大于组合1 条件的履齿高度,这表明履带板的履齿高度越大则履带板的受力越大,且履齿高度要比履齿节距对履带板受力的影响大一些。组合2 代表的是行驶速度快慢对履带板的受力的影响。从图8 中可以看出,组合2 条件下履带板受力大于其他组合条件下履带板的受力,表明低速行驶可以获取更大的推进力。

图8 不同组合因素条件下履带板受力的曲线图Fig.8 Curve of force on track pad under different combination factors
如图8 和图9 所示,组合4 代表了大节距、高履齿的履带板,其在旋转挤压土壤的过程中受到土壤颗粒的反作用力较大,表示此类履带板能产生更大的土壤对拖拉机的推进力,然而该结构的履带板引起的土壤颗粒沿水平侧方向(Y 轴方向)发生的滑移也较大。低速行驶时可以获取更大的推进力,造成的滑移也更大。从经典拖拉机理论可知,在土壤滑移的一定范围内,土壤滑移越大,土壤能产生的推进力越大,而土壤滑移一旦超过某个阈值,土壤能产生的推进力急剧降低[1]。

图9 各组合条件下的土壤颗粒沿水平侧方向(Y 轴方向)发生的位移曲线图Fig.9 Displacement curve of soil particles along horizontal direction (Y-axis direction) under each combination factors
4 结论
本文借助离散元方法分析履带板和土壤相互作用产生推进力的初始阶段即履带板旋转挤压土壤时,土壤各深度层的滑移现象和履带板受到的土壤反作用力(推进力)。土壤颗粒的滑移位移大小代表土壤对履带板后续平动运动的干扰,而履带板的受力大小可视为土壤对拖拉机的推进力。
(1)水田土壤在静置状态下可分为水、泥浆和土壤3 层,离散元法可以模仿自然界中水分子真实渗透土壤颗粒的方式,最终形成和实际情况类似的水、泥浆和带有少量水分土壤的3 层结构。
(2)仿真计算结果表明,在履带板旋转挤压土壤的过程中,履带板受到的土壤颗粒反作用力逐渐增大,当履带板运动至与地面平行时,其受到的反作用力达到最大值;且在L1~L5 五个断层观察面中,断层L1 的土壤颗粒沿水平侧方向(Y 轴方向)的滑移位移最大。
(3)以不同履带板结构和切土速度作为边界条件,分析了不同条件下水田土壤在水平侧方向(Y轴方向)产生的滑移和履带板的受力情况,计算结果表明,大节距、高履齿的履带板可以引起更大的土壤对拖拉机的推进力,然而导致土壤颗粒沿水平侧方向(Y 轴方向)发生的滑移也较大。低速行驶可以获取更大的推进力,同时也产生更大的滑移。
以上结论与水田拖拉机行走系履带板实际工作情况相近。
猜你喜欢
专用汽车(2022年2期)2022-04-05
中国慈善家(2020年2期)2020-09-09
旗帜文摘(2020年1期)2020-04-20
华声文萃(2020年2期)2020-03-16
文萃报·周五版(2019年41期)2019-09-10
创新作文(1-2年级)(2017年11期)2018-04-17
中学生数理化·八年级物理人教版(2014年1期)2015-01-09
中学生数理化·八年级物理人教版(2014年2期)2014-04-02
数理化学习·初中版(2011年9期)2011-11-14
坦克装甲车辆(2000年6期)2000-06-13
