电动汽车剩余里程估计
2022-10-30 12:59梁莹
农业装备与车辆工程 2022年2期
梁莹
(200093 上海市 上海理工大学 机械工程学院)
0 引言
尽管新能源汽车在近几年迅猛发展,但是电动汽车里程要求仍然达不到燃油车的水平。因此,本文在整车模型的基础上,用主成分分析对行驶的工况进行特征分析以及模糊聚类的方法进行状态识别,结合电池剩余可用和能耗来估计电动汽车的剩余里程。
1 整车模型的建立
1.1 模型结构
在 MATLAB/Simulink 平台上建立电动汽车整车模型用于剩余里程仿真计算,模型中包括了车辆纵向动力学模型、驾驶员模型、电机模型、电池模型、传动系模型等[1]。
1.2 车辆纵向动力学模型
车辆行驶过程中主要受到滚动阻力、空气阻力、坡道阻力及加速阻力,其受力方程为

式中:Ff——滚动阻力,N;Fw——空气阻力,N;Fi——坡道阻力,N;Fj——加速阻力,N。其模型如图1 所示。
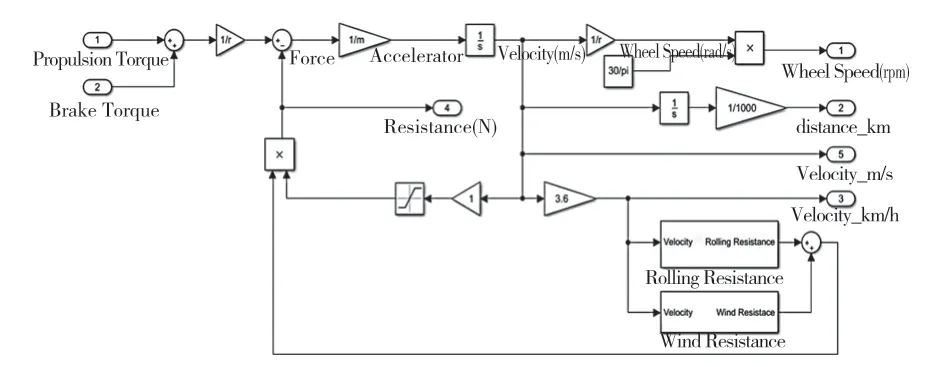
图1 动力学模型Fig.1 Dynamic model
1.3 驾驶员模型
驾驶员模型主要根据行驶的工况来判断驾驶员的意图,即输入为目标与实际车速,输出为加速及制动踏板开度[2]。驾驶员模型的精确度直接影响后面剩余里程估计模型的仿真验证,一般采用PID 算法搭建驾驶员模型,如图2 所示。
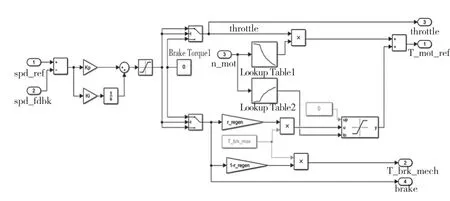
图2 驾驶员模型Fig.2 Driver model
1.4 电机模型
电机模型为行驶中的车辆提供动力,它会影响车辆的各种性能,但是电动汽车剩余里程的估计仅需要电机输出的基本性能参数,于是采用电机自身实验数据进行建模,如图3 所示。

图3 电机模型Fig.3 Motor model
1.5 电池模型
目前介绍锂电池SOC 研究方法的文献非常多,此模型给出了最简单的安时积分法估计SOC,如式(2)所示:
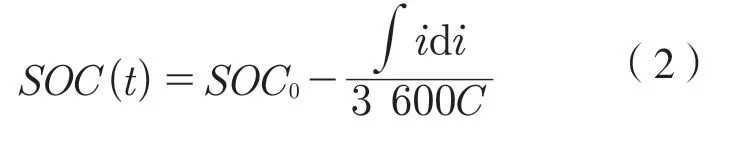
式中:SOC0——电池初始 SOC 值;C——电池额定容量,A·h[3]。电池模型如图4 所示。
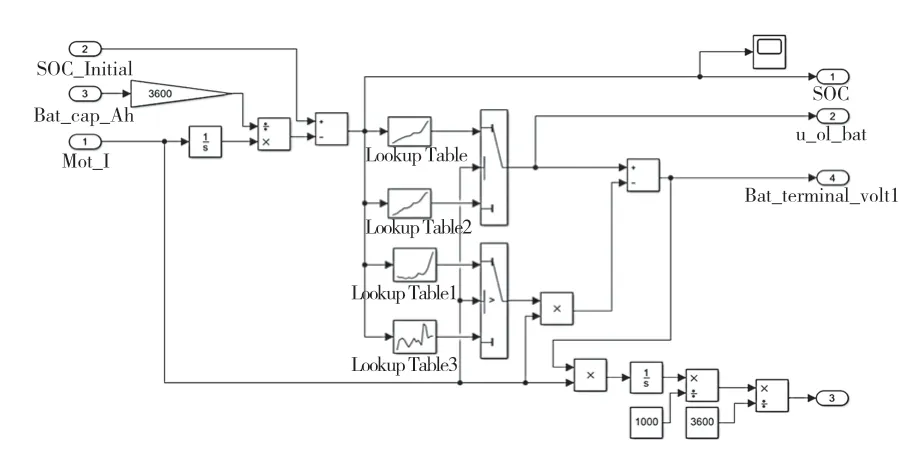
图4 电池模型Fig.4 Battery model
对车辆动力学进行系统建模,主要建立了纵向动力学模型,包括车辆行驶阻力模型,采用PID 算法搭建了驾驶员模型,并结合电机和电池的实验数据以及实际数学理论进行建模,为后续分析车辆实际能量消耗和剩余里程估算奠定基础。
2 剩余里程估计模型研究
2.1 电池剩余可用能量估计
电池剩余可用能量是指纯电动汽车以某一工况行驶时,从当前时刻到电池放电截止这一过程中,电池累计可以提供的能量[4]。本文根据电池当前SOC 估计值与允许放电截止SOC 值得到当前可用的SOC 值,并将其与电池标称容量相乘得到剩余可用容量,再与未来放电平均电压相乘即可得到锂电池的剩余可用能量[5]。电池剩余可用能量的计算公式为:

2.2 平均能耗法
传统汽车根据油箱内剩余的汽油数量和当前油耗计算出剩余汽油还能行驶多少千米,根据此原理,计算纯电动汽车剩余续驶里程定义为平均能耗法[6]。本文选取一定行驶里程ΔS(km)内车辆所消耗的能量ΔE(k·Wh);再计算出此时车辆的平均能耗eavg((k·Wh)/km);最后用剩余能量以及平均能耗计算出剩余续驶里程。具体表达式为:

2.3 工况识别法
电动汽车剩余里程是在某特定理论工况根据行驶中电池组的剩余能量和单位里程能耗计算得到。实际中汽车行驶工况多变,而工况是影响续驶里程重要因素之一,因此对车辆的行驶工况进行识别分析,从而对电动汽车剩余里程进行估算。
2.3.1 汽车行驶工况片段特征参数
汽车行驶工况中比较典型的行驶工况有:美国的 UDDS 工况、HWFET 工况,欧洲的 NEDC工况等,这些行驶工况是通过对车辆实际分析得到的[7]。我们可以选取应用较多的汽车行驶工况,将这些工况进行周期性的划分,形成一个个工况片段。为避免出现忽略或者过分强调某个行驶工况的信息,通过分析,选取常用的12 个特征参数描述行驶工况片段。如表1 所示。

表1 汽车行驶工况片段特征参数表Tab.1 Fragment characteristic parameters of vehicle driving conditions
2.3.2 工况片段的主成分分析
对标准工况片段的 12 个特征参数数据进行主成分分析,将原数据标准化后进行相关性计算得到特征参数间的相关系数,见表2。
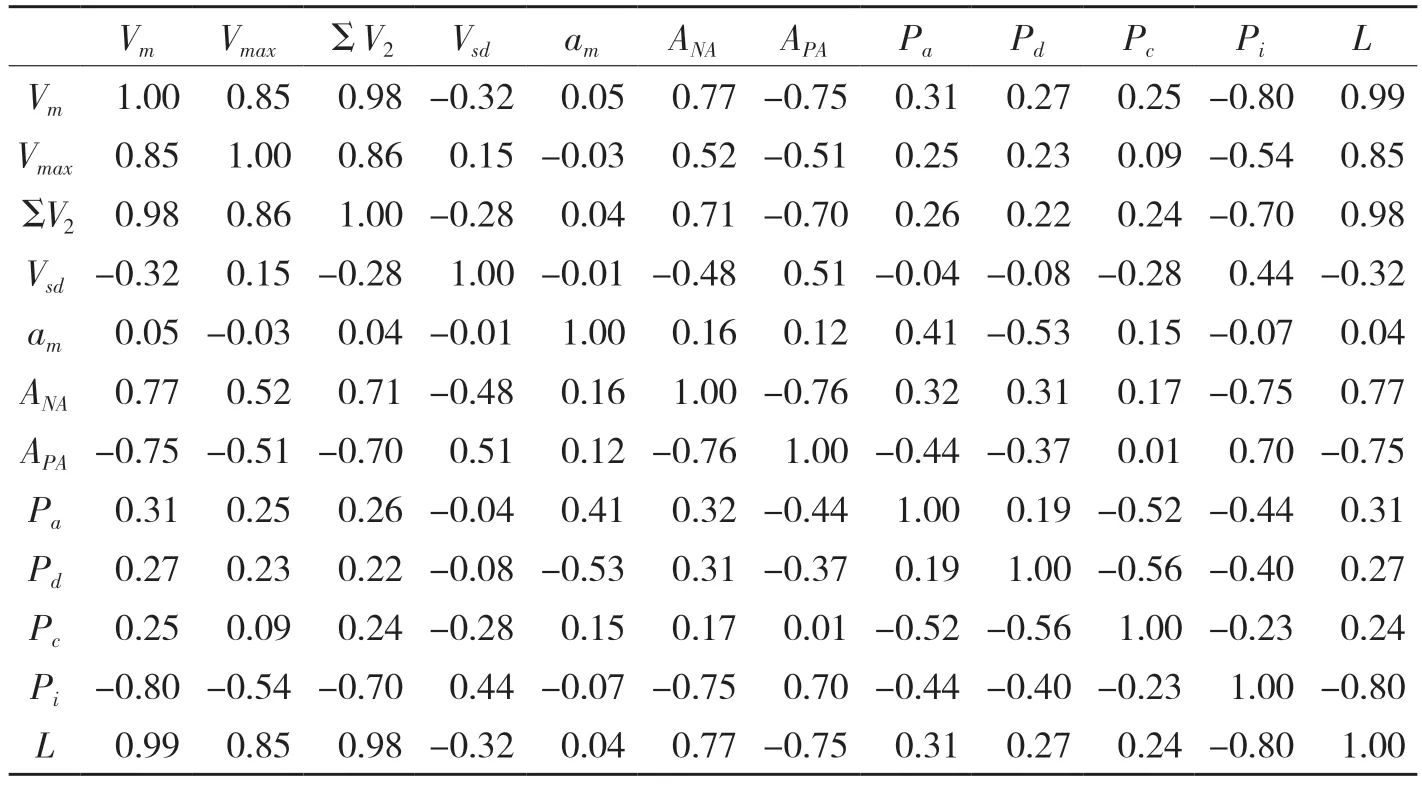
表2 特征参数间相关分析结果Tab.2 Correlation analysis results among characteristic parameters
由表2 可以看出12 征参数间具有一定的相关性,并且有些参数间的相关系数较大,例如平均速度和行驶距离间的相关系数为 0.99,所以存在重复的工况信息。主成分分析就是为了剔除不同特征参数重叠信息,在不丢失原始信息的情况下使用更少的变量进行表达。根据特征参数与主成分间的相关性及参数间的相关性,特征值越大说明该部分的影响越强,一般将特征值大于1 的主成分作为分析对象。如表3 所示,前4 主成分的特征值均大于1 并且累积贡献率为 90.76%,所以前4 主成分能很好地代表行驶工况片段的特征参数。
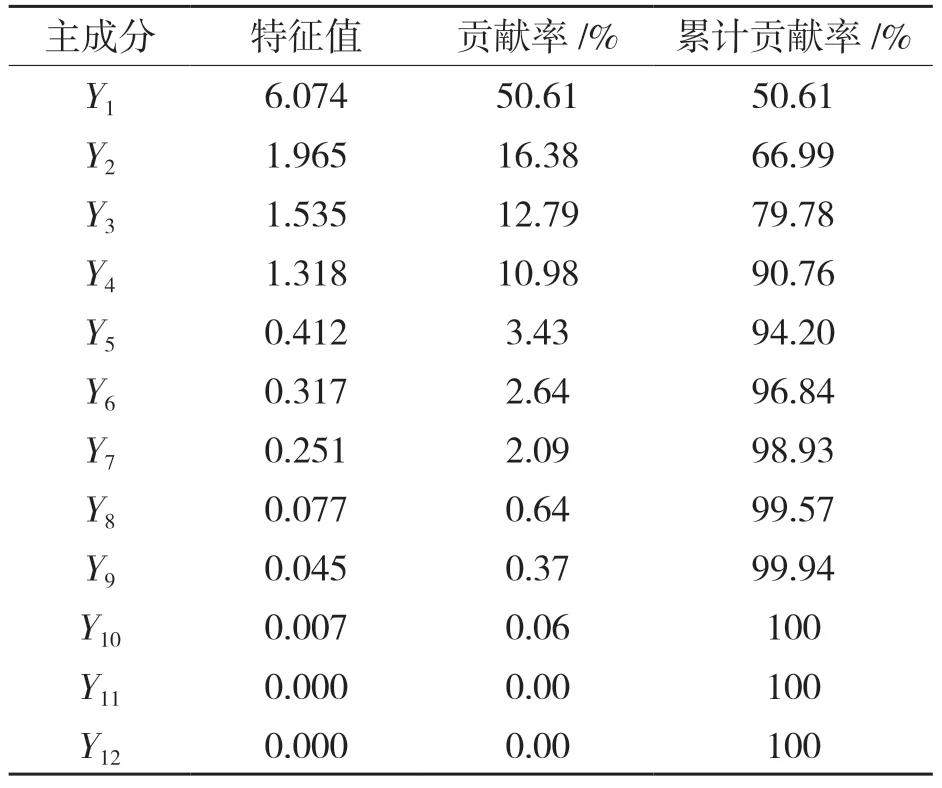
表3 各主成分特征值、贡献率和累积贡献率表Tab.3 Eigenvalues,contribution rates and cumulative contribution rates of each principal component
表4 是前4 个主成分的载荷矩阵数据,载荷系数的绝对值越大,说明该参数与主成分的相关程度越高。根据特征参数与主成分间的相关性,最终选择平均车速、怠速比例、匀速比例和减速比例作为主要持征参数[8]。
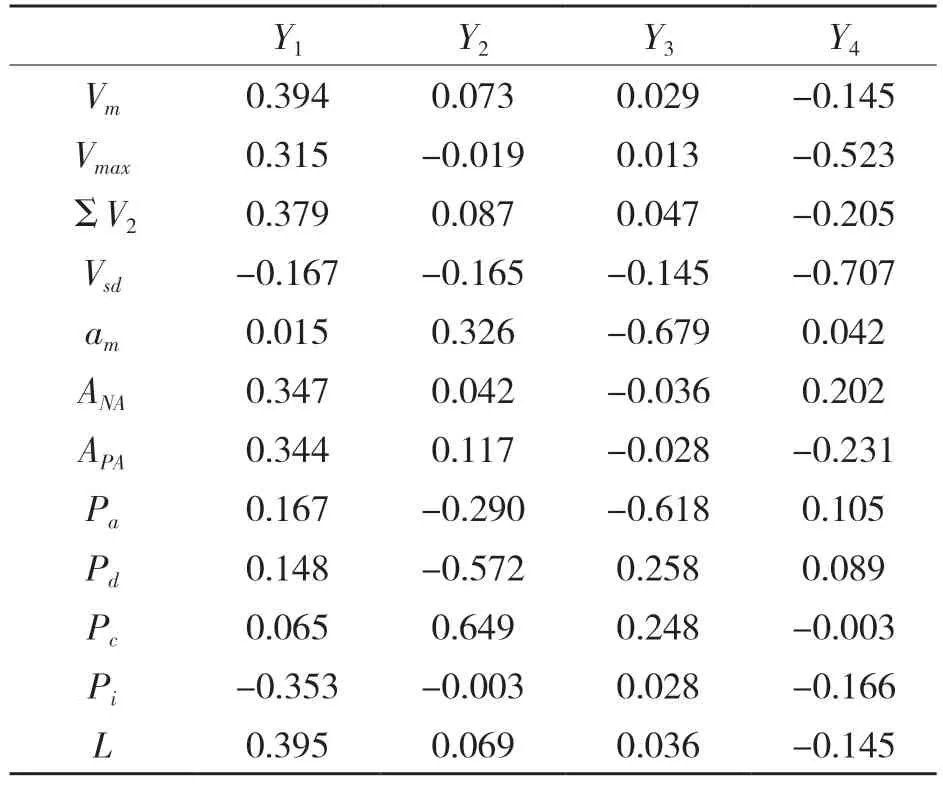
表4 主成分载荷数据表Tab.4 Principal component load data
2.3.3 行驶工况片段聚类分析
(1)C 聚类分析
将n 个样品划分为C(2 <C <n )类,令V={v1,v2,…,vc}为每个类的聚类中心,令uik表示第k 个样品属于第i 类的隶属度,同时uik满足目标函数为

式中:U=(uik)c×n——隶属度矩阵;m——隶属度幂指数;‖xk-vi‖——第k 个变量到第i 个中心的距离;J(U,V)——聚类对象到聚类中心的加权平方距离之和,聚类的目的就是确定合适的U和V 使J(U,V)最小[9]。
(2)工况片段聚类分析
任意选取10 个标准工况,每隔120 s 进行片段划分,划分 88 个片段,对片段分别取不同值进行聚类分析,聚类中心特征参数进行对比,如图5 所示。在C=5 和C=6 的情况下各类别容易混淆,C=3 时聚类1 的怠速和减速接近,而C=4时每一类分辨清晰,故取C=4。
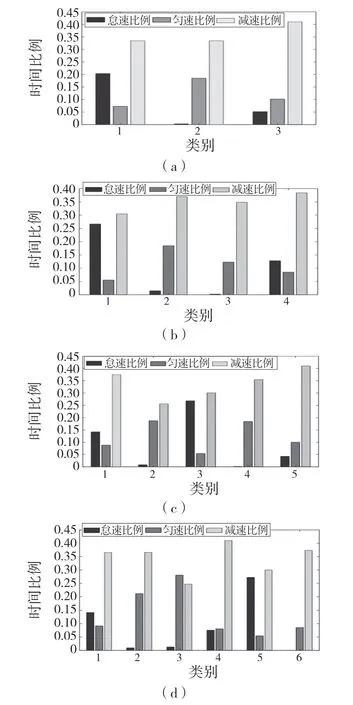
图5 不同C 值聚类中心比较Fig.5 Comparison of clustering centers with different C values
将数据进行模糊聚类得到每个聚类中心代表这一类别工况的基本特征,并将聚类的工况片段用平均车速和怠速比例2 个参数表示,结果如图6。

图6 88 片段聚类结果Fig.6 Clustering results of 88 fragments
聚类1 的中心坐标是(20.5,0.287),代表这个工况片段的怠速比例大,车速相对比较低,一般属于交通比较拥堵的城市工况;聚类3 的中心坐标(83.2,0.001),代表这个工况片段的平均车速较高,而怠速比例却很低,一般属于高速工况;聚类2 和聚类4 的中心坐标分别为(57.2,0.062)和(33.7,0.177),这两类工况在聚类1和聚类3 之间,属于城市郊区工况。
(3)工况的识别
将汽车行驶过程中获得的行驶工况的数据进行定时间周期的划分,分成一个个行驶工况片段,分别计算各个特征参数与所有聚类中心的距离d,到聚类中心距离最短的就属于该类别。距离计算公式为:

式中:x——某一个片段的特征参数;Ci——聚类 i 的聚类中心参数。
聚类中心结果如下:C1(20.5,0.287,0.148,0.261)、C2(57.2,0.062,0.341,0.259)、C3(83.2,0.001,0.217,0.377)、C4(33.7,0.177,0.096,0.345)。工况识别就是选取最近的行驶工况的片段,根据公式计算此片段到聚类中心的距离,距离最小的聚类则为该片段的类别。
3 剩余里程估算仿真分析
3.1 循坏工况剩余里程估计
NEDC 循环工况包含了4 个城市工况和1 个郊区工况,能够较好地描述城市车辆的正常行车情况,该循环工况下的最高车速为120 km/h,城市工况的平均车速为 18.7 km/h,郊区工况的平均车速为 62.6 km/h。为考察电动汽车在非等速工况下的续驶里程,以NEDC+FTP 工况作为整车模型的输入。仿真时一个工况循环不足以跑完全程,因此设置了多个循坏。如图7 所示,从电池满电量开始,设置截止SOC 值为0,汽车一共行驶了105 km。图 8 刚开始时估算值与实际值误差大,随后误差慢慢减小,这是由于单位里程能耗值在刚开始时波动比较大,后来趋于平稳。

图7 NEDC+FTP 工况下续驶里程Fig.7 Driving mileage under NEDC+FTP conditions

图8 NEDC+FTP 工况下剩余里程Fig.8 Remaining mileage under NEDC+FTP conditions
3.2 实车工况剩余里程估计
将行驶片段数据输入模型得到行驶片段的能耗,如图9 所示。根据模型计算出四聚类的平均能耗,从而得到汽车实际行驶过程中的能耗[10]。每个工况片段属于一个聚类,通过隶属度得到各个聚类的平均能耗分别为0.087 4,0.332 6,0.510 0,0.155 9 kW·h。
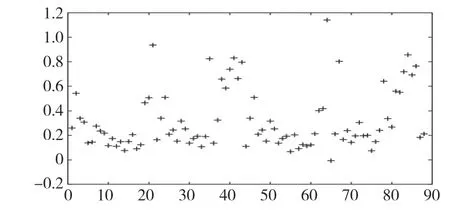
图9 88 个片段能量消耗Fig.9 Energy consumption of 88 segments
根据得到的聚类平均能耗以及每个片段能耗,可通过累加计算得到行驶过程中的总能耗。结合单位能耗行驶的里程和电动汽车剩余能量,用式(7)计算剩余里程:
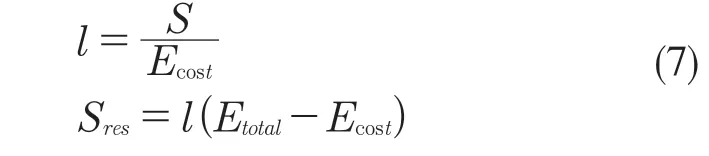
根据实车工况数据,以120 s 为一个片段,使用工况识别法得到不同聚类中心对应的实车工况每个片段的能耗如图10 所示,并识别出相应的聚类。仿真得到的行驶中电动汽车剩余续驶里程如图11 所示。
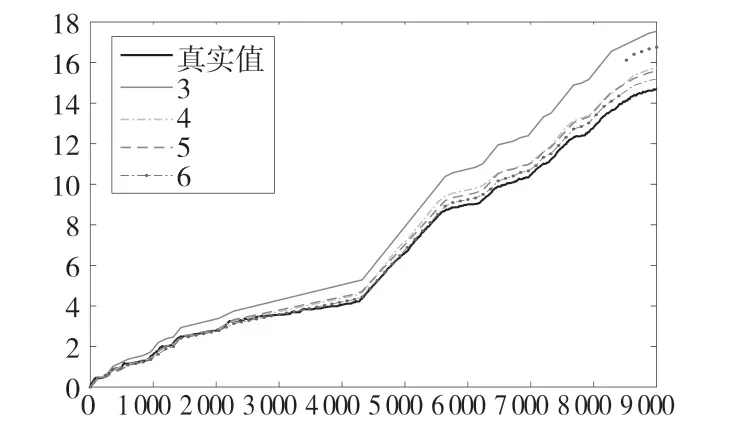
图10 实车工况下能量消耗Fig.10 Energy consumption under real vehicle conditions
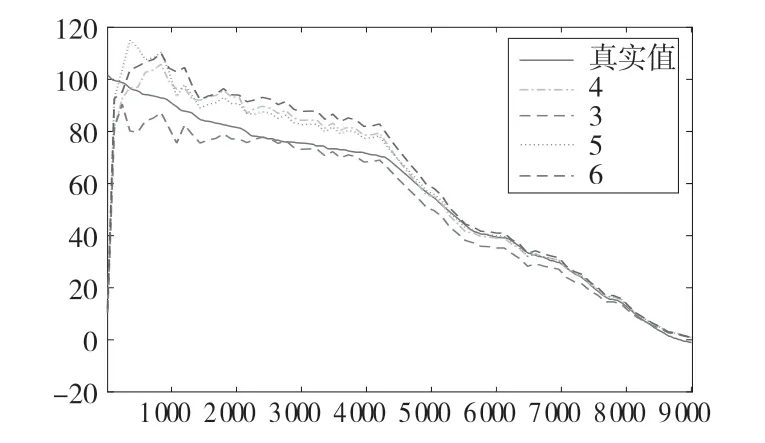
图11 实车工况下剩余里程Fig.11 Remaining mileage under real vehicle condition
根据图10、图11 可以看出,取4 个聚类中心为最优结果这个结论得到了验证,取常见的几个聚类中心时,电动汽车剩余里程估计的结果显然是4 最好。
4 结语
本文在MATLAB/Simulink 平台上建立电动汽车整车模型,根据电池模型准确估计SOC 从而得到剩余可用能量,然后对汽车行驶片段的工况进行聚类和识别,对比了不同聚类中心剩余里程估计的结果,聚类中心取4 时结果最好。结果表明,该模型能在不同工况下实现剩余里程较为准确的实时变化,同时可有效避免给用户造成里程焦虑和工况急剧变化的情况。
猜你喜欢
汽车实用技术(2022年14期)2022-07-30
舰船科学技术(2022年10期)2022-06-17
汽车实用技术(2022年4期)2022-03-07
华东师范大学学报(自然科学版)(2019年5期)2019-11-11
电子技术与软件工程(2016年23期)2017-03-06
电子技术与软件工程(2016年22期)2016-12-26
科技视界(2016年20期)2016-09-29
投资与理财(2015年22期)2015-09-10
今日中学生(初三版)(2013年6期)2013-07-30
新疆人文地理(2009年7期)2009-09-29