
某新型低地板有轨电车运行稳定性的研究
2022-10-23 14:00李子嘉黄桢国戴焕云
机械制造与自动化 2022年5期
李子嘉,黄桢国,戴焕云
(西南交通大学 牵引动力国家重点实验室,四川 成都 610031)
0 引言
近几年随着中国经济飞速发展,人们的出行方式变得多种多样。有轨电车自1879年诞生之日起便倍受人类亲睐,近些年更是发展迅猛,在某些政府财政不足以支持地铁发展的地区,成为了城市公共交通的主力军。有轨电车虽然具有低投入、大运量、无排放等诸多优势,但是由于其运行区域大多处于人流密集区域的马路中央,与公路交通不可避免会产生干扰,一旦出现问题,会给公共交通带来很大的危害,故国内外学者对其运行安全性和平稳性进行了研究。贾璐等[1]采用极限环法、构架加速度幅值法以及构架和轮对加速度方均根值法对轨道车辆系统的横向运动稳定性进行了评判。李玉青[2]基于simpack软件,着重研究了悬挂参数对100%低地板有轨电车的运动稳定性以及曲线通过性能的影响。曹志礼[3]总结分析了我国铁道车辆振动性能评定方法 , 指出了“平均最大加速度评定法”是一种能定量评定车辆最大振动的简单而可行的方法 , 并以此为基础提出了自动数据处理方法。徐士恒等[4]针对货运动车组的特点,在传统多刚体仿真模型的基础上,综合考虑集装器的结构、布置和安装方式,研究运行速度250 km/h以上货运动车组的动力学性能以及对所运送货物的完整性、安全性进行评估时需要考虑车体和集装器的耦合关系。 MA Y W等[5]采用显式有限元模型研究了车轮在钢轨上滚动时的“接触稳定性”现象。POLACH O[6]论证了接触非线性对铁路车辆稳定极限性能的影响,并用两个参数描述了轮轨接触几何关系。WILSON N等[7]研究车辆悬架参数和车体惯性参数加上不良的轮轨接触模式,对车辆横向稳定性性能的影响。周劲松等[8]将最优化理论运用于铁道车辆蛇行运动稳定性研究领域 , 建立了转向架轴箱定位参数最优化设计的数学模型。KO E S等[9]在Saemaul-ho研究经验的基础上,利用相似律对KTX-Sancheon的1/5小型转向架设计进行了研究,并对1/5小型转向架的运行稳定性进行了试验。
不同于独立路权的轨道交通体系,有轨电车运行在人流车流密集的公共区域,通过平交道口、小曲线半径较多,故对其安全性和平稳性要求更为严苛。本文通过型式试验的数据进行处理分析后得到列车运行时的安全性指标包括脱轨系数、轮重减载率以及轮轴横向力等,舒适性指标即车体sperling平稳性指数[10],从而对车辆的运行品质进行全面的评估。
1 研究对象
研究对象为一组新型低地板有轨电车,包含有3台动力转向架和1台拖车转向架,车辆编组依次为Mc1—T—M—Mc2,列车最高试验速度选取为70 km/h。本次试验选取整列车,在车体和转向架上布置测点进行动力学测试。车辆的示意图如图1所示。
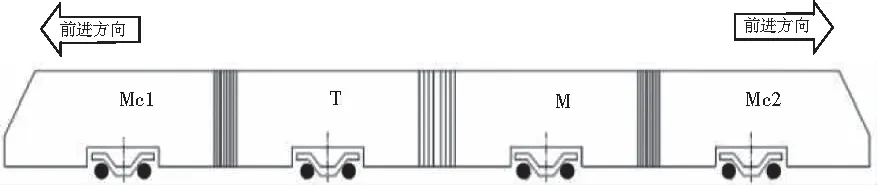
图1 被测列车示意图
2 研究内容
2.1 对列车安全性的研究方法
试验采用了轮轨作用力间接测量方法进行轮轨力测试,轮轨力间接测量方法旨在基于轮对受力状态,建立轮对力和力矩平衡方程,通过轮对惯性力和悬挂受力,可间接求得轮轴横向力和两侧轮轨垂向力,而惯性力和悬挂力可结合轮对固有参数和实测振动信号确定。其中悬挂受力计算时对其进行线性化处理,利用位移传感器测得悬挂件行程乘以刚度可得悬挂力大小,惯性力计算时利用轴箱处采得振动加速度进行处理后与质量相乘可得。
根据GB5599—1985[11]以及UIC518—2009[12]规定,各指标的具体要求如下。
脱轨系数Y/Q≤1.2。试验过程中,当Y/Q达到1.2时停止提速。
轮轴横向力H≤0.85×(10+P0/3),其中P0为左右车轮静载荷之和,单位为kN。
轮重减载率ΔP/P≤0.65。
倾覆系数D=Pd/Pst<0.8。其中:Pd为车辆或转向架同一侧车轮的动载荷;Pst为相应车轮静载荷。
2.2 列车安全性试验结果
表1、表2分别为AW0(空车)以及AW3(重车)载重下各转向架运行安全性指标试验结果。在R40m、R50m和R180m等多个典型曲线线路下,Mc1车(动力转向架)和T车(拖车转向架)的轮轴横向力、轮重减载率和脱轨系数最大值均小于对应的限值,满足标准规定的要求;表3、表4分别是AW0(空车)以及AW3(重车)载重工况,各类线路下Mc1车、T车、M车、Mc2车和整车倾覆系数的试验结果,结果表明车辆的倾覆系数小于相应限值,满足标准要求。

表1 转向架运行安全性指标最大值(AW0)

表2 转向架运行安全性指标最大值(AW3)

表3 车辆倾覆系数最大值(AW0)

表4 车辆倾覆系数最大值(AW3)
由此可见,在空车工况下,动车转向架的各项参数均大于拖车,而且头尾车的指标要大于中间车。对比列车在AW0和AW3两种工况下的安全性指标可以发现,除了轮轴横向力之外,其他安全性指标在载重增大后均有所降低,也就是说列车整体的安全性较空车时有了很大的提升。
2.3 对列车运行平稳性的研究方法
在对列车运行平稳性研究时,着重关注车体的运行质量,故在两个转向架中心上方车体地板附近1 m处布置加速度传感器用来检测车体地板的振动加速度,后期由此计算车体的横向平稳性指标即sperling指数。具体的限制要求如表5所示。
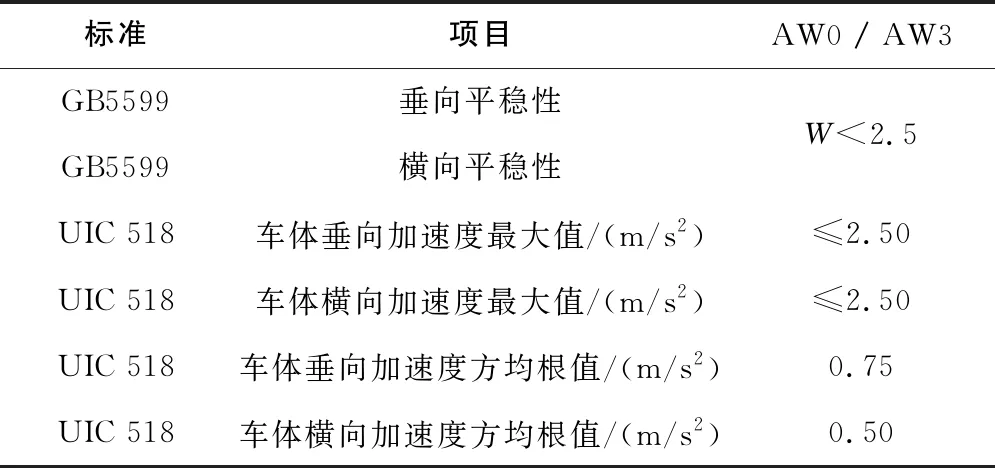
表5 评定标准及项目
2.4 列车运行平稳性研究结果
1)AW0工况下平稳性试验结果
如图2所示,随着速度的提高,列车车体的横向平稳性指标是不断上升的,也就是车体的横向稳定性逐渐变差。其中Mc2车的变化较为明显,在45 km/h的速度之后,Mc2车的横向平稳性指标是最高的,几乎呈线性增长,其次是T车。T车在高速区段的平稳性略好于Mc2车,但相对于其他两节车要差一些。从中可见,同属中间车辆,在AW0条件下的T车稳定性要差于M车,所以电机以及齿轮箱产生的转矩对中间车运行稳定性的提升有所帮助。头尾车的变化较为复杂,在不同的速度范围内接近两个极端表现,在45 km/h以下的速度运行时Mc2车的稳定性是最差的,在45 km/h往上的区域则刚好相反。列车垂向平稳性指标有着和横向类似的变化规律,随着列车运行速度的提升而近乎于线性增长,如图3所示。综合考虑两个方向的平稳性指标以及运营成本的因素,确定列车在人流量少地区的运营速度。
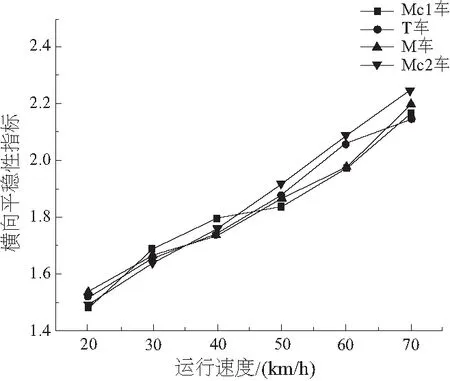
图2 列车运行横向平稳性指标(AW0)
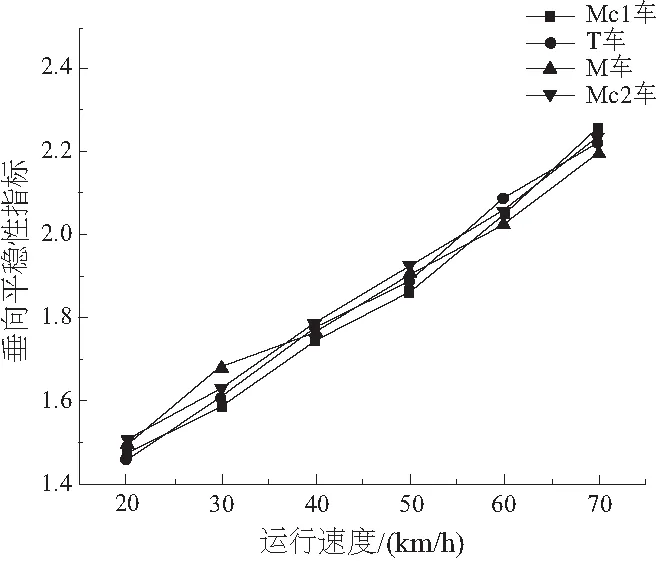
图3 列车运行垂向平稳性指标(AW0)
2)AW3工况下平稳性试验结果
如图4所示,列车在AW3工况下的横向平稳性指标随着车速的提高一直上升。此处T车的变化较为明显,全速度段内保持较高的横向平稳性指标,这和AW0时的表现有所不同。虽说相比空车时,车辆的稳定性有所提升,但是T车的变化显然没有其他M车大,也就是说,对工况变化的不敏感使得T车在满载情况下的运行稳定性较其他车差。头尾两个Mc车还保持着分速度区间的变化规律,但是正好与空车时候相反,在高速区域内Mc2车平稳性差一些。从图5可以看出,T车的垂向平稳性在全速度段都保持着较低值,Mc2车的垂向平稳性较差。

图4 列车运行横向平稳性指标(AW3)
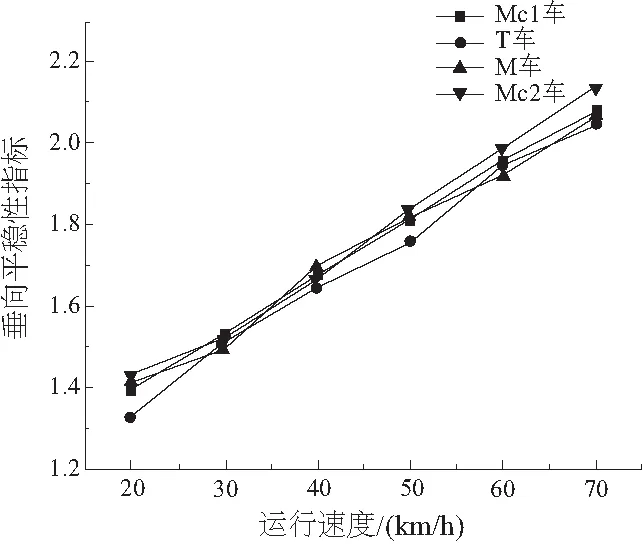
图5 列车运行垂向平稳性指标(AW3)
由于Mc1车属于头车,而且变化规律较为明显,故将其前中后拆开分析。由图6可知,该车前端的平稳性指标较大,后端次之,中段最小,故司机室位置以及靠近风挡铰接处的平稳性较差,后期新车设计要考虑司机室稳定性的控制,保障列车安全运行。
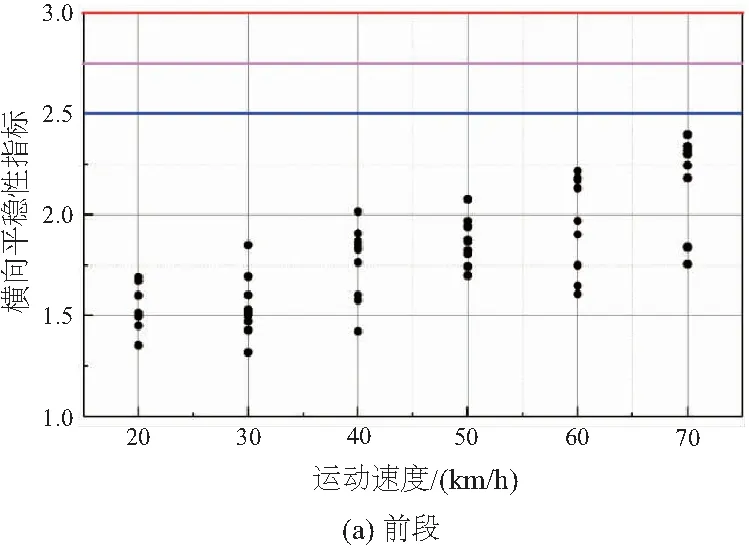
图6 Mc1运行平稳性指标
2.5 列车运动稳定性的研究
图7-图8为被试车辆在AW0以及AW3载重条件下车辆的运动稳定性。对转向架的构架端部测点数据进行0.5 Hz~10 Hz带通滤波,可以得到以下结果:Mc1车和T车在最高试验速度70 km/h下,构架横向振动加速度幅值小于标准规定的限值,转向架未出现失稳现象,满足标准要求。
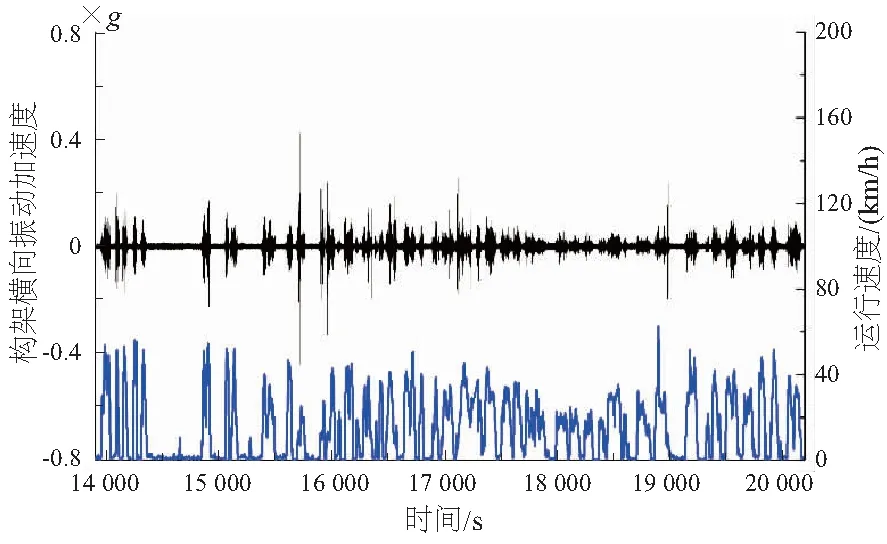
图7 转向架的构架端部振动加速度(AW0)
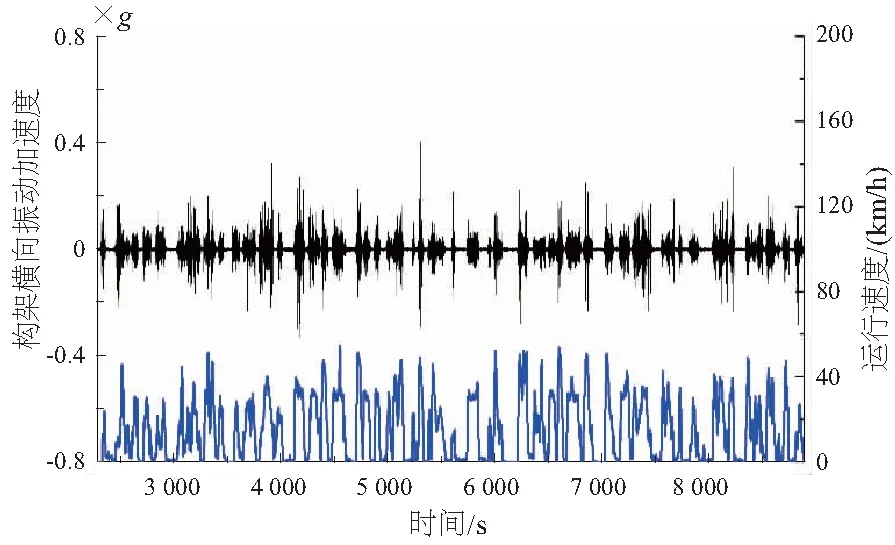
图8 转向架的构架端部振动加速度(AW3)
3 结语
该型有轨电车在运行时头尾车和中间车的动力学指标是存在差异的,即中间车的运行品质高于头尾车。在中间车当中,动车的运行品质优于拖车。加载之后,车辆的稳定性得到明显的提升,除轮轴横向力有所上升外,其他指标均下降,车辆运行更加安全稳定。Mc1车前端以及后端稳定性较差,中段车体较为稳定。新车设计时虽然要考虑车体轻量化,但不可使车体过轻造成相应动力学指征恶化,影响行车品质。
猜你喜欢
数学物理学报(2021年3期)2021-07-19
科技与创新(2020年19期)2020-10-09
铁道通信信号(2020年1期)2020-09-21
铁道通信信号(2020年10期)2020-02-07
铁道通信信号(2018年10期)2018-12-06
厦门理工学院学报(2016年1期)2016-12-01
铁道通信信号(2016年8期)2016-06-01
铁道通信信号(2016年6期)2016-06-01
湘潭大学学报(哲学社会科学版)(2015年5期)2015-11-25
中国铁道科学(2015年6期)2015-06-21
