
基于预设直线通道的鸽子机器人飞行转向调控研究
2022-10-23 14:00马晓琪陈姝元
机械制造与自动化 2022年5期
马晓琪,陈姝元
(南京航空航天大学 机电学院,江苏 南京210016)
0 引言
随着社会发展和科学的进步,传统人造机械机器人发展迅速,但其普遍存在灵活性低和适应性差等问题,于是动物机器人应运而生。动物机器人是对动物直接进行控制,指利用动物自身优点,采用脑机接口技术,结合电子信息科学、脑科学、控制科学等多学科技术对动物的感觉传入或其内部神经进行刺激控制,从而人为操控动物行为,使其能够代替或辅助人类完成危险复杂的作业任务[1-3]。目前鸽子机器人是户外实验研究的热门课题,其天生的导航、回巢、避障、避险和抗干扰等能力得到研究人员的广泛认可。因此对鸽子机器人的飞行调控研究意义重大。
2005年国外学者VYSSOTSKI A L等制作了一套鸽子数据记录系统,研究了飞行状态下鸽子的脑电信号[4];2017 年国内学者YANG J Q等研发了一套鸽子户外自由飞行时给予刺激并记录飞行轨迹的设备[5],利用该设备研究了鸽子机器人在脉冲频率和脉冲持续时间的最优刺激参数问题;2019年国内郑州大学王宏昌研制了一套基于轨迹偏差反馈的鸽子飞行装置[3],利用该装置实现了控制鸽子按照预规划路径飞行的功能,实现方法是通过该飞行装置根据GPS实时定位信息计算出鸽子当前位置与预设路径之间的偏差,根据偏差的大小和方向对鸽子施加不同转向行为和不同强度的刺激,最终实现了实时调整鸽子飞行轨迹使其按照预设折线轨迹飞行的功能,但由于研究基于动物活体,该研究在综合考虑鸽子机器人的刺激耐受性、自主运动意图和神经疲劳等生物特性方面尚有不足,需要完善控制策略和算法。本文在前人的基础上研究控制鸽子机器人飞行转向行为的优化算法,改善控制策略使其飞行转向的控制效果更好。
本研究更加注重鸽子机器人飞行转向行为控制的准确性和多因素的综合考量,深入研究鸽子机器人控制策略的优化,目的在于通过具有预编程功能的飞行装置刺激调控鸽子机器人,使其运动转向具有一定的支配性和确定性。研究方法主要是通过户外试验检验控制算法的有效性并比较不同控制策略的试验结果,最终得到效果更佳的控制算法。
1 材料和方法
1.1 飞行控制逻辑设计
微处理器上的控制主程序基于Keil uVision5平台开发,程序用C语言编写。主控制程序的功能模块主要包括刺激器参数设置、SD卡及文件系统初始化、直线通道设置、GPS定位信息的记录、经纬度信息的平面直角坐标转换、运动信息计算、转向行为判断、室外定时刺激以及程序停止等。其中直线通道设置和转向行为判断功能可以为不同的实验轨迹配置个性的参数方案。
根据刺激方案,当鸽子机器人超出预设通道需要施加转向刺激时,由刺激装置输出一系列频率为80 Hz的脉冲,产生虚拟神经电活动从而控制鸽子行为[6]。刺激发送端分为3个端口,3路分别为参考地电压、左转刺激信号和右转刺激信号[6],可分别设置刺激脉冲参数,如脉冲周期和占空比等。基于GPS坐标的鸽子机器人飞行调控[6]流程如图1所示。GPS获取的信息由鸽子飞行器的存储卡记录,通过读卡器传输至计算机进行数据显示和处理。
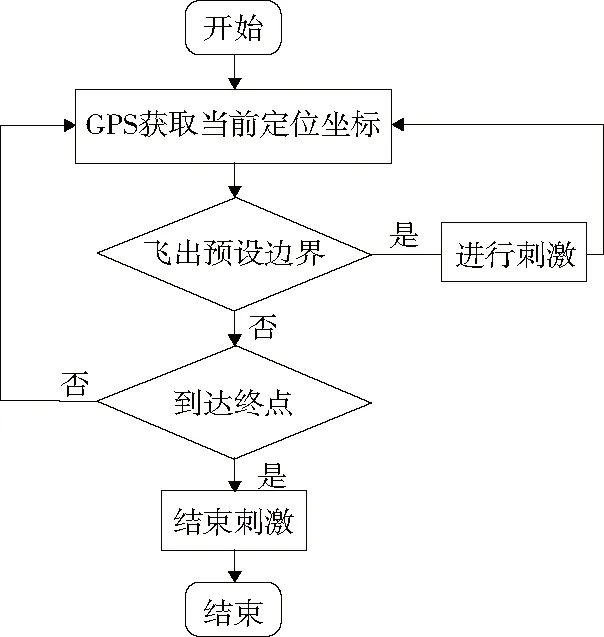
图1 基于GPS坐标的鸽子机器人飞行调控流程图
1.2 鸽子飞行控制实验
1)实验材料
3只实验鸽,编号分别为19号、W1号和15号,平均体重438 g(±20 g),年龄6个月左右,身体健壮,具有优秀持久飞行能力及导航能力,均养殖于南京航空航天大学仿生结构与材料防护研究所鸽舍。
2)鸽子机器人的端口测试和选用
通过室内蓝牙装置进行鸽子机器人端口测试,选择负正脉冲连续刺激方式,设置频率80 Hz,波宽1 ms,首次刺激电压1.2 V。借助实验人员自主开发的手机应用软件,根据鸽子的刺激应答情况进行参数调整,按步长0.2 V逐渐增加电压至鸽子产生强度合适的刺激反应,电压上限为2.6 V。
由于端口间存在差异,需比对不同端口下鸽子的反应效果,选取左右转刺激效果最好的一对端口,并确定能使鸽子产生转向运动的最小信号(鸽子匀速自然地旋转一圈)并记录。实验测试结果见表1和表2。最终根据测试结果19号鸽左转刺激通道为3,刺激电压为1.8 V,右转刺激通道为8,刺激电压为2.0 V;W1号鸽左转刺激通道为4,刺激电压为2.0 V,右转刺激通道为7,刺激电压为2.5 V;15号鸽左转刺激通道为3,刺激电压为2.0 V,右转刺激通道为6,刺激电压为2.0 V。
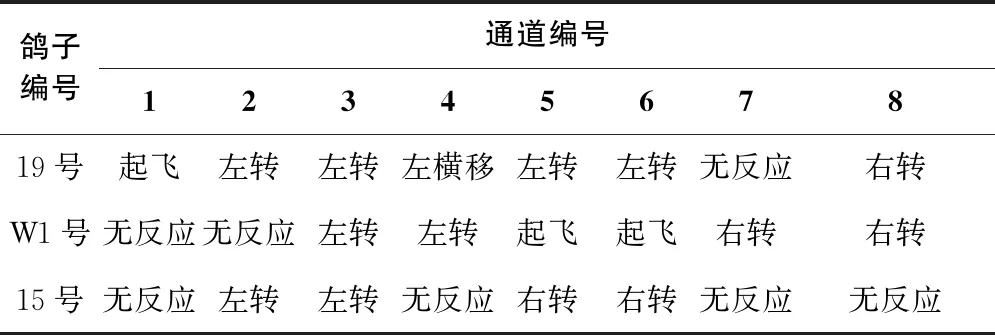
表1 实验鸽端口测试通道反应
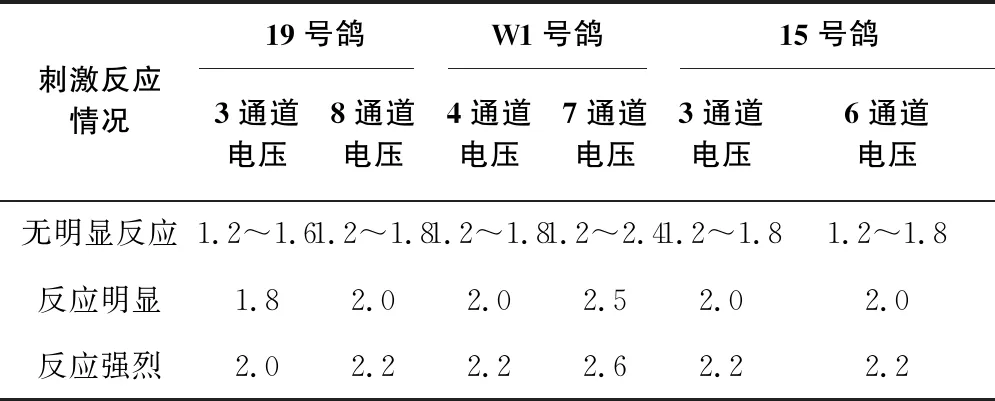
表2 左右转所选通道刺激电压测定结果 单位:V
19号实验鸽测试时鸽子的有效行为反应如图2所示。本研究采用直径0.2 mm的八芯细导线制作弹簧刺激线,用于连接设备所选端口和鸽子脑部电极进行刺激信号的输出。
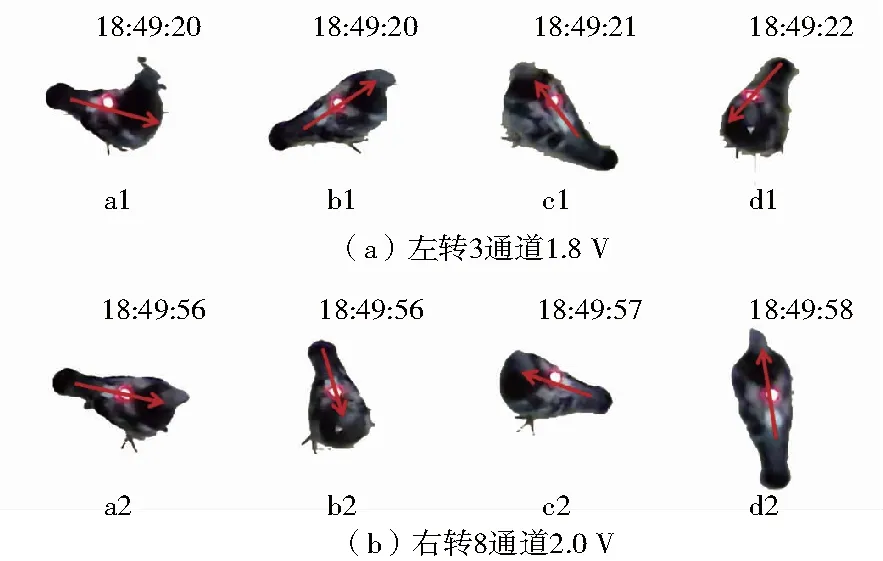
图2 端口测试时鸽子的左右转刺激反应
1.3 鸽子机器人公里级直线飞行控制的模拟仿真
鸽子飞行轨迹的模拟仿真程序基于MATLAB平台开发。将轨迹数据导入平台,模拟大地坐标系下鸽子飞行状态,通过模拟找出最佳实验直线通道。后期实验所得数据仍用该方式显示运动轨迹,以检验刺激主程序的正确性和可靠性。
为保证鸽子安全需确保刺激主程序准确无误,于正式试验前采用两种方式检验,一为实验者携刺激设备乘校车,检验对校车轨迹的刺激情况是否符合预期;二为实验鸽仅背载刺激设备但脑部未连接刺激线,检验对鸽子轨迹的刺激情况是否符合预期,并预估施加刺激后能否达到实验要求。检验时刺激装置仅需记录GPS定位信息,通过上述方式借助MATLAB分析处理数据,优化控制算法,至少连续3次获得符合预期的鸽子背载检验数据,才可正式进行鸽子机器人飞行刺激试验。
2 结果
2.1 实验方案
采用基于GPS坐标的鸽子机器人飞行调控[6],预先设定了鸽子机器人飞行直线通道,当鸽子飞行轨迹偏离预设通道时,根据GPS定位经纬度信息判断鸽子飞行状态,向端口发送特定刺激信号,从而调控鸽子机器人的飞行转向行为。根据鸽子当前所在位置与通道之间的距离偏差,判断鸽子机器人是否超越边界。当判断其超出边界范围时,根据鸽子飞行速度方向和通道倾角之间的角度偏差,判断是否需给予刺激以及应给予何种转向行为的刺激,判断依据如图3所示。
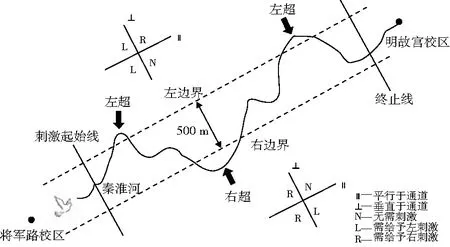
图3 刺激输出判断依据
根据前期多次鸽子背载试验的轨迹数据,设计拟合了宽500 m的直线通道,通道起点设置为秦淮河,选定北纬31.985°;终点为南航仿生所鸽舍,东经118.817 5°、北纬32.04°。因鸽子对刺激信号反应具有延迟性和疲劳性,为确保户外实验刺激效果,设计刺激方案如下:过秦淮河后等待5 s进入刺激判断,单次刺激时长2 s,刺激后休息2 s才能进行下次刺激判断,刺激2 s停2 s视为一个刺激小周期;当连续刺激了5个小周期时,设置20 s等待时间进行休息,期间不施加刺激,并将其视为一个刺激大周期;40个小周期为刺激上限,当刺激总次数达上限时停止刺激判断,当鸽子机器人到达终点时退出刺激主程序,刺激结束。将所得轨迹数据和刺激数据上传至计算机,用MATLAB和谷歌地图显示鸽子实际飞行轨迹,进行数据处理和分析,根据实验所得数据,由刺激前后鸽子机器人的坐标变化计算出刺激后鸽子机器人每秒钟飞行方向的角度变化,从而得到不同刺激形式下鸽子机器人左右转刺激反应的成功率。
2.2 实验结果
对3只实验鸽子机器人进行远距离飞行调控实验,每只鸽子机器人调控实验重复 3 次。实验记录鸽子机器人飞行轨迹如图4所示。在设计的飞行调控刺激方案下,当鸽子机器人飞行轨迹超出左边界且飞行方向与边界方向夹角<90°时,向鸽子施加右转刺激信号,鸽子随即出现右转趋势,继而向边界内飞行;当鸽子机器人处于左边界外且飞行方向与边界方向夹角≥90°时,向鸽子施加左转刺激信号,鸽子机器人即出现左转趋势,进而能更快飞回通道边界内,转向趋势符合实验预期。实验结果表明本实验成功实现了对鸽子机器人飞行转向的调控,达到了控制鸽子机器人飞行轨迹趋向于预设直线通道的目的。
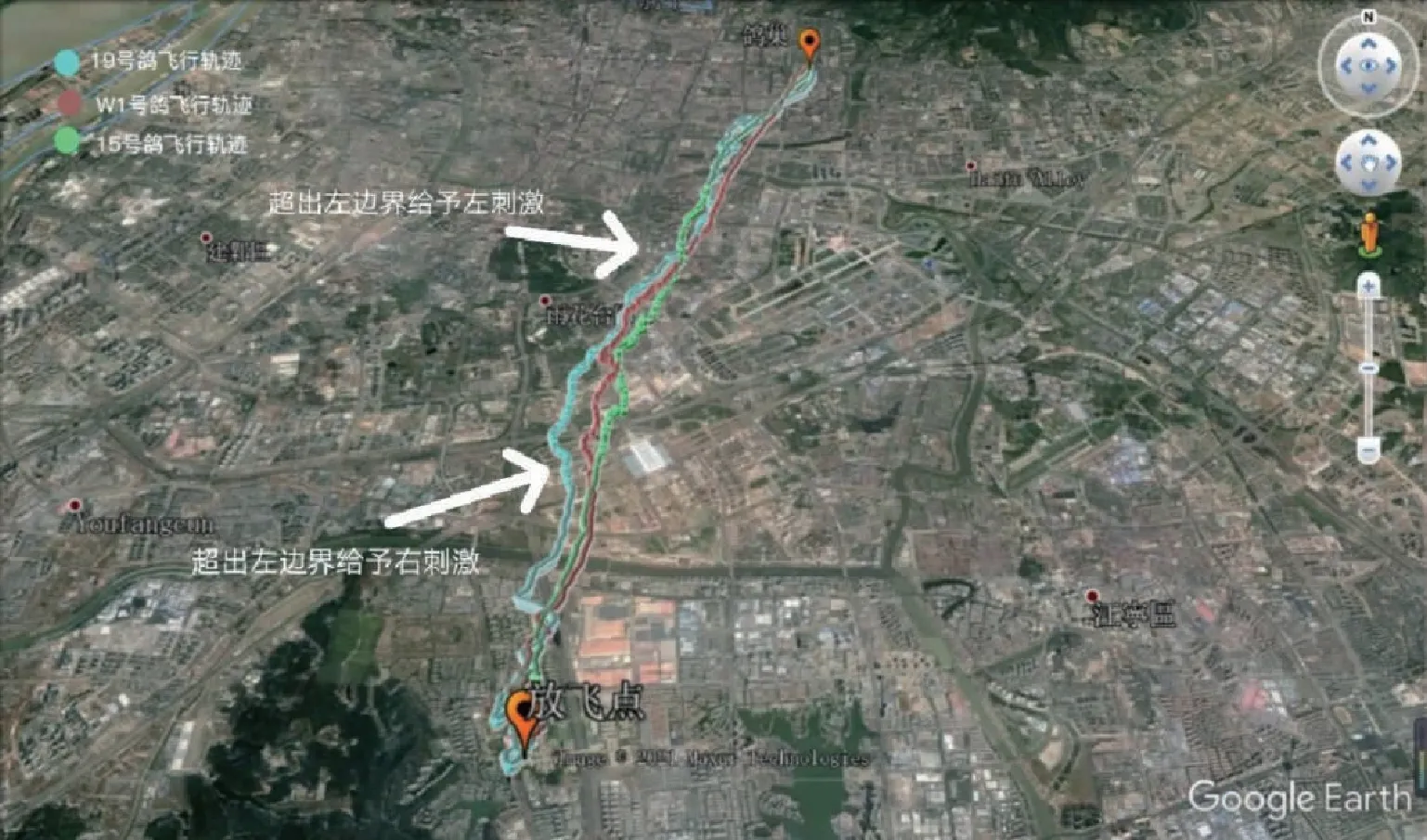
图4 3只实验鸽转向调控飞行轨迹
3 结语
在基于GPS坐标的鸽子机器人户外飞行调控实验中,设计了鸽子机器人飞行控制策略和控制算法,通过GPS定位获取鸽子当前位置坐标,进行偏差比较,判断施加的刺激,从而实现鸽子飞行方向的调控,其转向使轨迹趋向于预设直线通道。分别选取每只鸽子实验效果最好的一组数据进行处理,统计得到了不同形式刺激下鸽子左右转刺激反应的成功率,统计结果如表3所示。实验结果表明:成功实现了对鸽子机器人户外飞行的转向行为调控,达到了控制鸽子机器人飞行轨迹趋向于人为规划直线路径的目的。本研究对鸽子机器人日后的飞行调控研究具有借鉴意义,推动鸽子机器人在人员搜救、空间探索、定点运输和情报侦查等实际应用方面的发展。
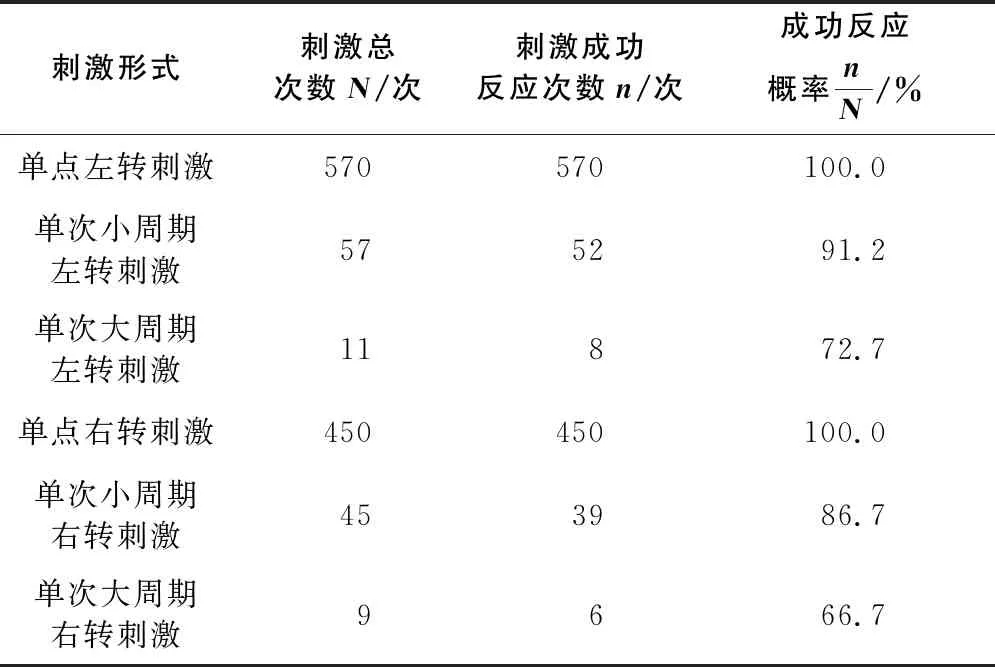
表3 鸽子机器人实验统计数据
本研究最终仅实现鸽子机器人的转向调控,但对其转向程度的控制效果不佳,后续将进一步研究优化刺激参数办法,实现鸽子从趋向于直线通道飞行转变为在直线通道内飞行,实现对其飞行轨迹的调控。鸽子机器人调控由外加刺激信号和自身大脑控制共同作用,随着刺激实验次数增加外加刺激信号的调控效果会逐渐减弱,且有的鸽子机器人刺激后出现逃避实验的现象,因此需严谨设置刺激参数,参数设置方法有待改进。通过调整参数,获得满足实验需求的最温和的、刺激强度最小的刺激信号,把对鸽子日常生理活动的影响和对鸽子相关脑区的伤害降到最小,减小刺激效果的衰减速度,延长鸽子机器人的使用寿命。考虑到生物本身具有个体差异性,同一刺激强度下其反应速度和应答效果有所不同,因此需要更多试验鸽验证本研究的有效性和普适性。
猜你喜欢
娃娃乐园·综合智能(2022年9期)2022-08-16
科学家(2021年24期)2021-04-25
读友·少年文学(清雅版)(2020年4期)2020-08-24
读友·少年文学(清雅版)(2020年3期)2020-07-24
青年歌声(2020年4期)2020-04-24
现代装饰(2018年5期)2018-05-26
读友·少年文学(清雅版)(2018年11期)2018-03-07
网络安全和信息化(2017年6期)2017-11-23
中国三峡(2017年2期)2017-06-09
阅读与作文(小学高年级版)(2017年4期)2017-05-08
