基础激励下转子-轴承-支座系统动力学特性研究
2022-10-21 08:15徐敬岗邓景珊
噪声与振动控制 2022年5期
徐敬岗,邓景珊,李 峰
(1.上海大学机电工程与自动化学院,上海 200444;2.常州工程职业技术学院智能制造学院,江苏常州 213164;3.江苏理工学院电气信息工程学院,江苏常州 213001)
旋转机械广泛应用于汽车、船舶以及航空航天等领域。一些旋转机械,其基础是运动的,难免会遇到外部激励的情况。例如爆炸冲击和波浪作用的舰船燃气轮机,地震时地面上的旋转机械以及行驶汽车上的传动轴系,当前,基础激励下转子系统的振动问题是学术研究的热点方向之一。
Dakel等[1-2]通过有限元法研究了偏心质量和基础运动耦合作用对轴系临界转速和轴心轨迹的影响规律。Duchemin等[3]通过理论和实验综合研究了轴系在临界转速附近时基础运动对系统稳定性的影响规律。Fawzi 等[4]分别研究了线性和非线性支承下基础激励对转子耦合系统动力学响应的影响规律。Edwards 等[5]通过试验分析了柔性转子系统在基础激励下的动态特性,获得了基础激励参数对系统响应的影响规律。Yan 等[6]选取了Jeffcott 转子系统为研究对象,考虑了基础位移载荷,通过集中质量法研究了转子系统的动力学响应特性。颜文忠等[7]基于转子-支撑-基础系统试验装置,研究了基础振动幅值和频率对转子横向振动行为的影响规律。祝长生[8]通过带有主动电磁轴承转子试验台,研究了电磁轴承基础振动对电转子系统动力学特性的影响规律。张欢[9]基于有限元法分别研究了基础简谐转动、横向简谐运动、基础冲击激励对转子系统动力学响应的影响规律。倪德等[10]研究了直升机在非惯性坐标系下尾传动轴的横向弯曲振动特性。Wang 等[11]在基础上施加地震波和正弦激励,研究了水平转子系统在基础激励下的非线性动态响应。综上所述,目前国内针对转子系统基础振动问题进行了较多研究,但动力学模型一般都较为简单,对于综合考虑柔性转轴、非线性滚动轴承效应以及支座耦合系统的振动特性以及基础振动对系统影响的研究尚不多见。
本研究综合考虑滚动轴承非线性弹性支承效应、滚动轴承和阻尼环之间的耦合效应、阻尼环与轴承座之间的耦合效应,建立起基础激励下转子系统的耦合动力学模型。并通过数值方法分析了基础激励对系统动力学行为的影响规律;在此基础上,以转子振动位移最小为目标,对支承阻尼环的刚度系数和损耗因子进行优化设计,以减小基础激励对系统动力学特性的影响。
1 数学模型
本研究的转子轴承系统主要由转轴、滚动轴承、滚动轴承外的橡胶阻尼环、轴承座组成,其中支座固定在基础上,系统三维模型如图1 所示。对模型简化,构建其力学模型,如图2所示。假设滚动轴承和橡胶阻尼环均周向对称。mbw1和mbwr分别为左右轴承外圈质量;mbs1和mbsr分别为左右支座质量;kx1和ky1分别表示水平和竖直方向支座与基础之间的刚度,cx1和cy1分别表示相应方向上支座与基础之间的阻尼。
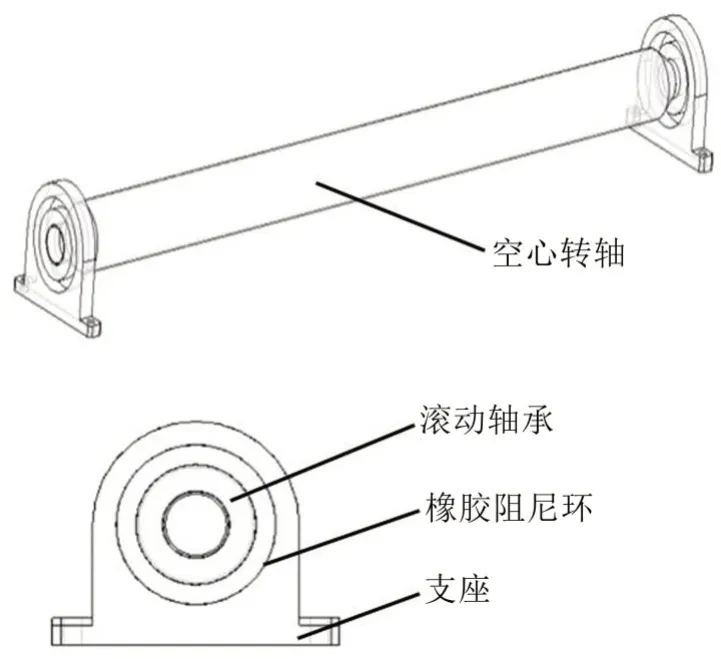
图1 系统物理模型
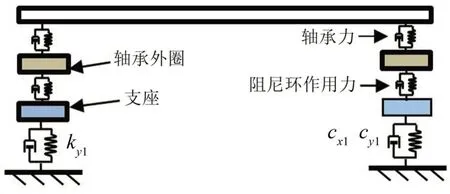
图2 系统力学模型
2 系统方程组
2.1 转轴系统动力学方程
转轴采用Timoshenko 梁单元建立其有限元模型,主要考虑横向振动,每个节点具有四个自由度。根据文献[12-13],可以求得转轴单元质量矩阵Me、刚度矩阵Ke、陀螺矩阵Ge和重力矩阵Qe;阻尼采用瑞雷阻尼,即Ce=αMe+βKe。
滚动轴承滚动体数为N,转轴角速度为ωϕ,轴承外圈和内圈半径分别为R和r。根据滚动轴承的运动学定理可得滚动体的角速度ωcage:

滚动轴承旋转时,即使是新轴承也会产生振动。因为轴承在受到径向载荷时,滚珠载荷是轴承外圈角位移的函数,同时轴承的总刚度连续变化,从而导致VC振动现象[14],即:

式中:BN为VC振动频率与转频的比值。
假设xw1(t)、yw1(t)、xwr(t)和ywr(t)为左、右端滚动轴承外圈在x和y方向横向振动位移,Fkxb1、Fkyb1、Fkxbr和Fkybr分别为左、右端轴承对滚动轴承外圈在x和y方向的作用力。令x=xr(0,t)-xw1、y=yr(0,t)-yw1,可求得左端轴承力Fkxb1=Fkxb、Fkyb1=Fkyb;令x=xr(L,t)-xwr、y=yr(L,t)-ywr,可求得右端轴承力Fkxbr=Fkxb、Fkybr=Fkyb。
转轴受到的非线性轴承力包括非线性弹性力和线性阻尼力,即:

式中:
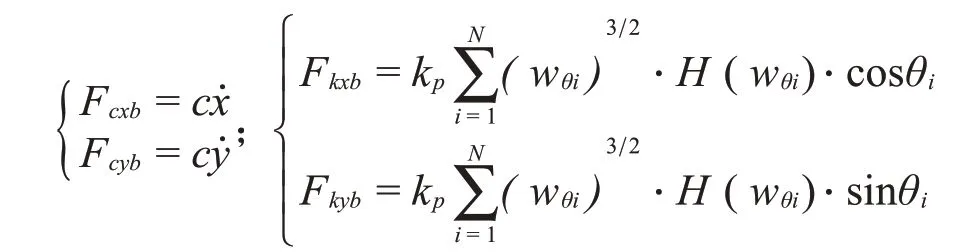
其中:kp为接触刚度;H为亥维塞函数,视滚珠与滚道的法向接触变形量wθi之正负而取1 或0,wθi表征了轴承游隙所引起的分段非线性,可以表示为:
将转轴各个梁单元进行组装,并将滚动轴承力集成到相应的节点上,即:

式中:[Mr]、[Cr]、[Kr]和[Gr]分别为转轴质量矩阵、阻尼、刚度和陀螺矩阵;[Qr]为转轴外力向量;Fb为相应节点的滚动轴承力。
2.2 轴承外圈动力学方程
本文采用Kelvin-Voigt 线性力学模型给出复支承度[15-16],因此可将橡胶阻尼环的复支承力Fs表示为:

式中:k*和u分别为橡胶阻尼环的复支撑刚度和振动位移,η为橡胶阻尼环的损耗因子。
不计橡胶阻尼环振子的小转角位移,则振动位移可表示为:u=x*+iy*,则:

式中:x*和y*为阻尼环在水平和垂直方向变形。
分析可知,轴承外圈受到滚动轴承的反作用力和阻尼环的作用力。假设左、右端支座在X方向和Y方向横向振动位移变量分别为xbl(t)、ybl(t)、xbr(t)和ybr(t);Fxsl、Fys;、Fxsr和Frlr分别为左、右端橡胶阻尼环对滚动轴承外圈在相应方向的作用力。基于牛顿第二定理,轴承外圈的运动微分方程组为:

式中:

2.3 支座动力学方程
支座受到阻尼环的反作用力、与基础之间的弹性力和阻尼力、基础的激励作用。假设xs(t)和ys(t)为基础同时对左右支座在X和Y方向上的位移激励。通过牛顿第二定理,支座的运动微分方程组为:
如果基础固定不动,即xs(t)=ys(t)=0。
2.4 系统动力学方程组
结合方程组式(4)、式(7)和式(8)可以建立转轴-滚动轴承-阻尼环-支座耦合动力学方程:

式中:[M]、[C]、[K]和[G]为耦合系统质量、阻尼、刚度和陀螺矩阵;[Q]为耦合系统广义力矩阵。
为保证计算精度,对系统进行无量纲化处理。通过以下代换:

式(9)可以转化为:

式中:[]=[M]γ0ω2,[]=([C]-ω[G])γ0ω,[]=[K]γ0。
3 转子-轴承-支座耦合动力学响应分析
采用龙格-库塔法计算耦合系统的数值解。系统动力学求解初始参数选取[16],如下所示:
L=1m 、E=2.1×1011Pa 、μ=0.3 、ρ=7 800 kg/m3、nr=4 000 r/min 、k1=4×106N/m 、kx1=ky1=2×108N/m 、kp=7.05×109N/m32、c=1 000 N·s/m、cx1=cy1=1000 N·s/m、γ0=15 μm、r=0.006 m、R=0.01m、N=13、η=0.15、mbw1=mbwr=0.05 kg、mbs1=mbsr=0.2 kg。
3.1 无基础振动时耦合系统动力学响应分析
无基础振动时转子系统安装在固定基础上,首先,计算获得转轴中心节点处振动响应随转速的分岔图,如图3 所示。分析可知,转速在1 000 r/min~10 000 r/min 范围内X方向中心节点的响应在Poincare 截面上存在唯一点与之对应;在转速1 800 r/min 附近出现峰值,表明转轴出现共振,频率约为3.2 Hz×30 Hz=96 Hz。
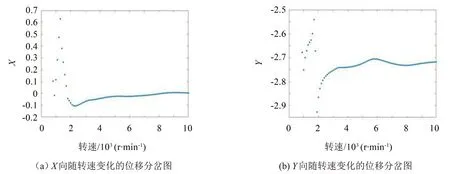
图3 振动响应的随转速变化的分岔图
为了进一步分析不同转速下系统的运转状态,图4 和图5 分别给出了1 500 r/min 和5 000 r/min 转速下转轴中心节点X方向振动位移响应的时间历程图、相平面图、轴心轨迹和FFT 频谱图。由图可知,时间历程图呈现周期性的波动,相平面图和轴心轨迹都是椭圆,频谱图中频率成分为相应转速下滚动轴承VC频率及其谐波频率。
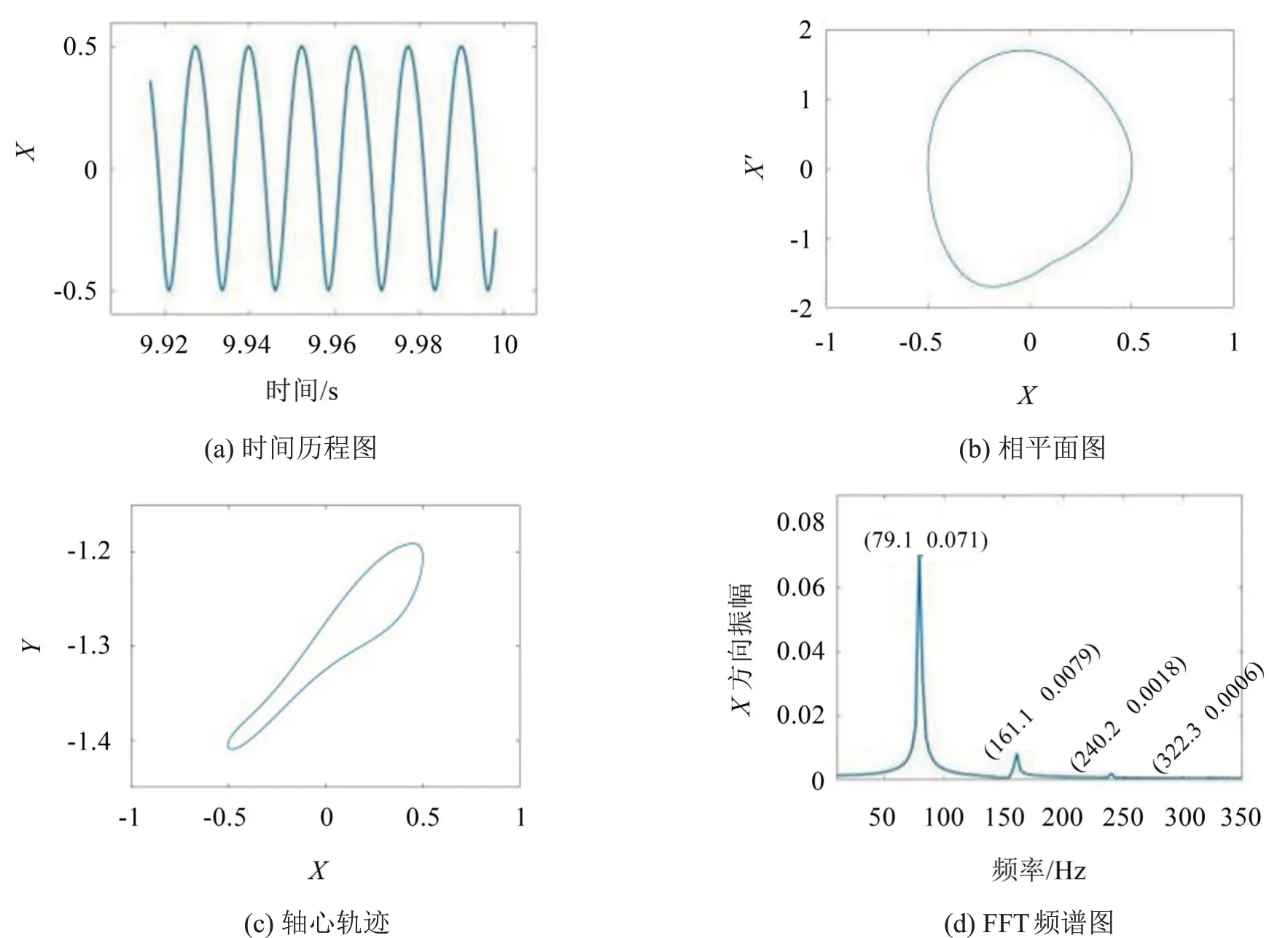
图4 转轴中心节点X方向上的响应(1 500 r/min)
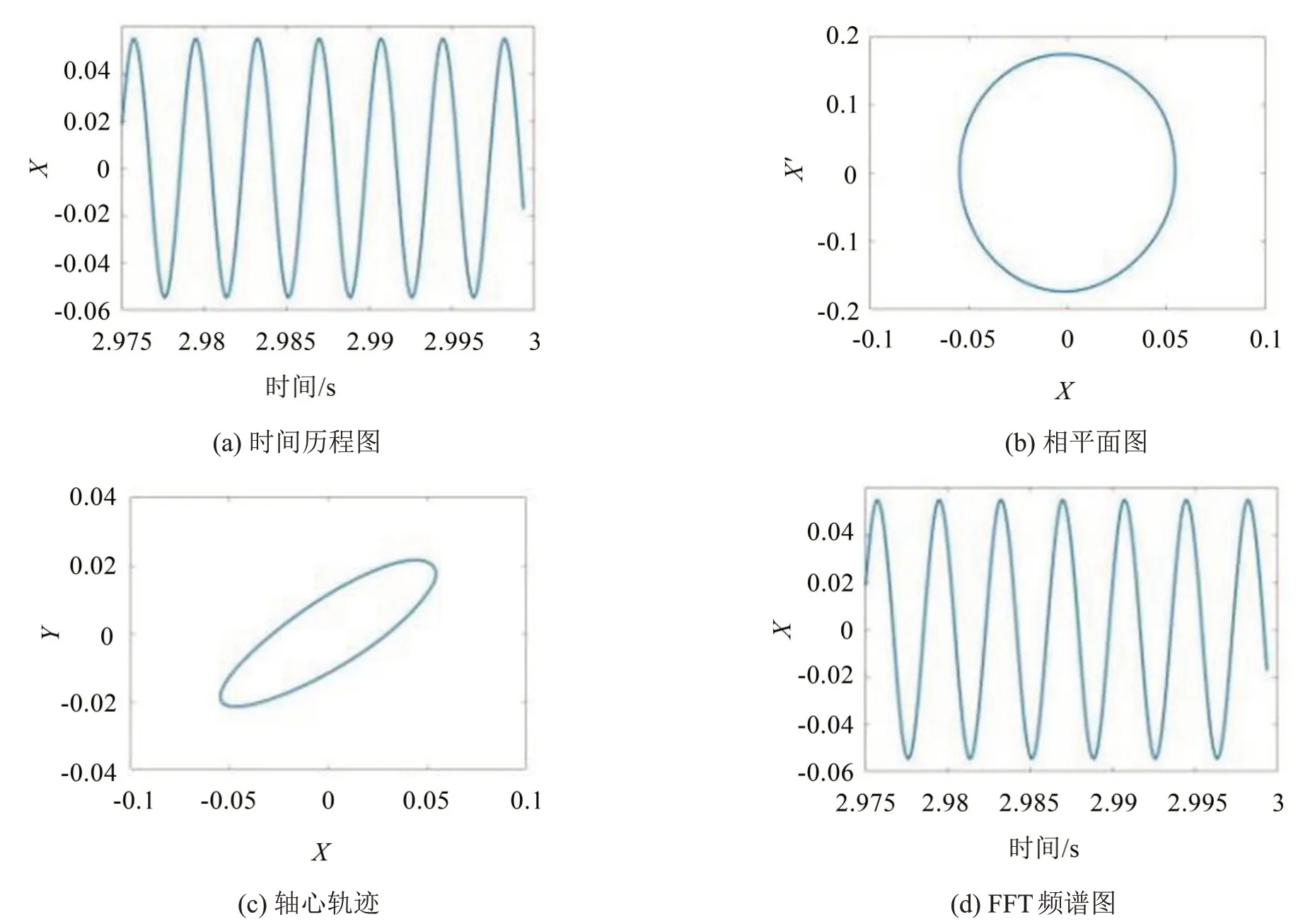
图5 转轴中心节点X方向上的响应(5 000 r/min)
3.2 基础振动对耦合系统动力学特性影响分析
为研究基础振动对耦合系统动力学特性的影响规律,取转速1 000 r/min~8 000 r/min 范围内,在Y向施加加速度基础激励(t)=Asin(Wbase*t),研究不同转速下耦合系统的动态响应,其中A为基础激励幅值,Wbase为基础运动角速度,分别取A=0.8 m/s2,Wbase=1000 rad/s,则基础激励相应的频率为fbase=159.2 Hz。
(1)基础振动对系统X方向动力学特性影响
为研究Y方向的基础振动对耦合系统X方向振动响应的影响规律,分别求得有无基础振动下,X方向振动响应的瀑布图,具体如图6所示。可知,无基础振动时三维频谱图中频率成分主要为随转速变化的滚动轴承VC频率(fvc)。在低转速时,可以观察到明显的谐波;有Y方向的基础振动时,X方向随转速变化的频谱图不仅有滚动轴承VC 频率及其谐波,在低转速下可以观察到明显的基础振动频率成分(fbase)和新的频率成分(f)。由于滚动轴承VC 频率显著大于其它频率成分,为了清楚研究在不同转速下转轴的频率成分,汇总1 500 r/min 和5 000 r/min转速下响应的时间历程图、相平面图、轴心轨迹、FFT频谱图进行详细地分析,分别见图7和图8。
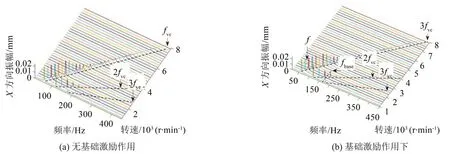
图6 不同转速下X方向上的振动响应的瀑布图
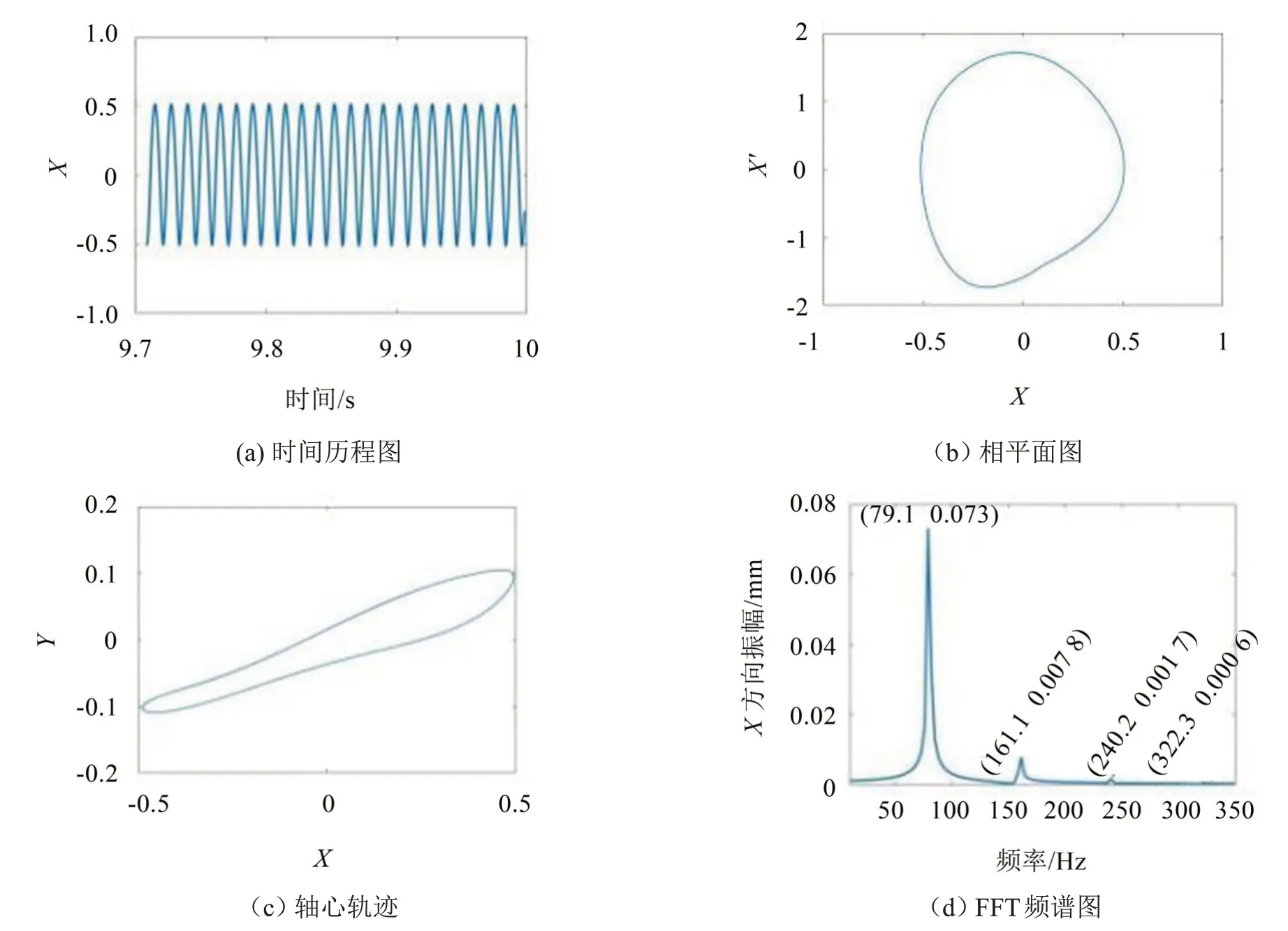
图7 X方向上的响应(1 500 r/min)

图8 X方向上的响应(5 000 r/min)
对比图4和图7可知,转速1 500 r/min下,Y方向的基础振动不改变系统X方向的运动,响应的时间历程图、相平面图、轴心轨迹大小、FFT 频谱图几乎不变。此外,对比图5 和图8 可知,转速5 000 r/min时,Y向的基础振动使系统X向由周期运动变为概周期运动,轴心轨迹由稳定的椭圆变为复杂的椭圆,基础振动下响应的频率不仅包含滚动轴承VC 频率(107.4 Hz)及其谐波频率,还有基础振动频率(156.2 Hz)和基础振动频率与滚动轴承VC 频率之差(263.7 Hz)。基础振动下X方向不同转速下响应的频率成分及对应关系,具体如表1所示。
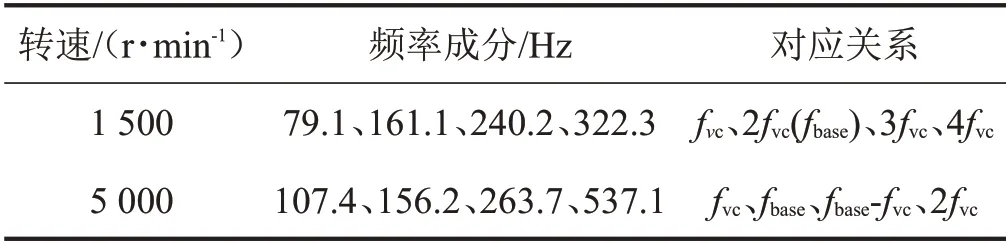
表1 转轴中心节点在X向上频率成分及对应关系
(2)基础振动对Y方向动力学特性影响
同样为了观察Y方向基础振动对耦合系统Y方向的影响,分别求得有无基础振动下,Y方向振动响应的瀑布图,具体如图9 所示。施加加速度基础激励时,Y方向随转速变化的频谱图中除了滚动轴承变刚度频率及其谐波,在整个转速范围内还可以观察到明显的基础激励频率成分。

图9 不同转速在Y方向上的振动响应的瀑布图
Y方向基础振动对耦合系统Y方向的影响与对X方向影响相似,转速1 500 r/min时,基础振动不改变系统Y向的运动状态;然而,转速5 000 r/min 时,基础振动使系统Y方向由周期运动变为概周期运动。基础激励下不同转速在Y方向振动响应的频率成分及对应关系,具体如表2所示。

表2 不同转速下Y方向振动响应的频率成分及对应关系
综上所述,Y方向上基础振动对耦合系统X和Y方向上的动力学特性都有影响。当基础振动频率等于滚动轴承VC 频率或其谐波频率时,不影响耦合系统的运动;当基础振动频率不等于滚动轴承VC频率或其谐波频率时,会呈现出组合共振现象,组合共振的频率包括多个成分,可以表示为整数倍的滚动轴承VC频率与基础激励频率的代数和。
4 转子轴承系统动力学参数优化设计
在设计中,要求各转速下转子轴承系统位移振动响应受到基础激励的影响尽可能减小。通过文献[15-16]研究可知,阻尼环参数k1、η对系统动力学行为有着重要的影响。因此,本文将k1、η作为设计变量,并构建设计空间。分别1 500 r/min 和5 000 r/min转速下X和Y方向基础激励对转子振动位移幅值加权作为目标函数,通过方程式(5)、式(10)建立优化数学模型如方程式(11):
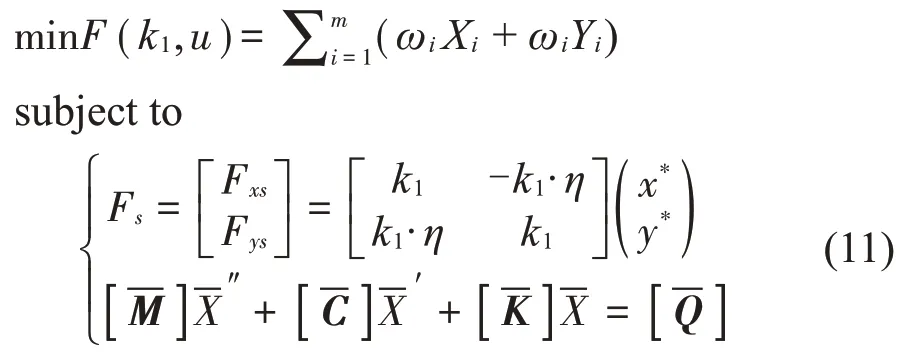
式中:ωi为权重,Xi、Yi分别为对应转速的X和Y方向基础激励频率影响下的转轴中间节点FFT幅值。
采用遗传算法进行优化设计,求得最优解为:

对优化后参数进行计算,获得基础频率下转轴中间节点最大幅值,可以得到表3 优化前振动响应的频率及各方向最大幅值以及表4优化后振动频率及各方向最大幅值的对比。

表3 优化前振动响应的频率及幅值

表4 优化后振动响应的频率及幅值
通过上述分析可知,在1 500 r/min 和5 000r/min 转速下X和Y向幅值分别降低了19.72 %、20.83%及20.54%、25%。显然,设计方法优化后,基础激励对转子轴承系统的振动响应影响得到显著减小。
5 结语
针对具有基础激励的转子轴承系统,建立了转轴-轴承-支座耦合动力学模型,模型中转轴采用梁单元离散,考虑了滚动轴承非线性弹性支承效应、滚动轴承与阻尼环间影响、阻尼环与支座之间的耦合效应;最后采用数值积分方法求解系统微分方程组,对耦合系统振动响应进行动力学分析,获得如下结论:
(1)对于滚动轴承支承的转子耦合系统,在水平或垂直方向上的基础激励不仅对该方向转子的振动有影响,对其他方向上的振动也有影响。
(2)当基础振动频率等于滚动轴承VC 频率或其谐波频率时,不影响系统的运动状态;当基础振动频率不等于滚动轴承VC 频率或其谐波频率时,会呈现出组合共振现象,振动响应的频率包括多个成分,为整数倍的滚动轴承激励频率与基础激励频率的代数和。
(3)以转子振动位移最小为目标,对支承阻尼环的刚度系数和损耗因子进行优化设计,可减小基础激励对系统动力学特性的影响。
猜你喜欢
微特电机(2022年9期)2022-10-15
防爆电机(2022年4期)2022-08-17
防爆电机(2021年5期)2021-11-04
军民两用技术与产品(2021年6期)2021-10-14
防爆电机(2021年3期)2021-07-21
防爆电机(2021年3期)2021-07-21
南京大学学报(数学半年刊)(2020年1期)2020-03-19
北方工业大学学报(2019年5期)2019-03-30
电脑爱好者(2016年23期)2017-01-05
汽车与新动力(2014年2期)2014-02-27