毫米波雷达在皮沙发干扰下的有无人检测方法*
2022-10-20 10:21:06梁庆真周杨张彭豪
电子技术应用 2022年9期
梁庆真,周杨,张彭豪
(四川启睿克科技有限公司,四川 成都 610041)
0 引言
毫米波雷达作为一种精度更高的传感和检测技术,相比摄像头、激光雷达、PIR、超声波等技术有超精准且高性价比的显著优势[1]。毫米波雷达技术可以将检测范围提高至10 m,并能精确识别到1 mm 幅度动作,大至剧烈运动小至静止呼吸都能精准感知,可以联动家中设备做安防报警[2-4]。毫米波雷达技术能对生命体进行非接触式感知,既能摆脱传统感知设备24 小时佩戴问题,也能保护用户安全隐私[5]。毫米波雷达可以做到非接触精确识别呼吸及心率数据,通过对呼吸深度、心跳频率、体动参数等数据深入分析,判断用户睡眠质量,为睡眠呼吸中潜在的呼吸疾病提供辅助数据支持,所以毫米波雷达能够广泛应用于智能家居、智慧养老、智慧医院、康复中心项目建设中,24 小时实时监测和照护,满足居家、社区、机构三位一体的养老监护要求,缓解即将到来的老龄化社会养老难题[6-8]。然而在智能家居实现更精准的人员监测的过程中,首先要能实现室内有无人员的正确判断,如若无人,可以关闭一些电器以避免资源的浪费,如若有人则定位人员的位置,提供一些更精准的服务。在这个过程中遇到的一个问题是,皮沙发会反射出一个和人体一样的强信号,从而将沙发误判为人,且当人静坐在沙发上时,沙发的角落也会折射一个类似于人的信号,从而误判人员的数量。针对这个问题,本文通过人体呼吸时胸腔壁的起伏幅度获取特定的参数,并设置阈值,再加上呼吸频率的低频限定,又通过选取的特定的4 根虚拟天线能达到该阈值的天线数做一些判定,能很大程度地排除皮沙发的虚警干扰。
1 雷达的测距测速原理
毫米波调频连续波雷达通过发射扫频信号,并捕获路径中的目标反射的信号来获取对目标物的距离[9]。FMCW 雷达信号经目标反射延迟后,整体向后移动了τ(t)。当目标速度与雷达没有径向的相对运动时,即使有横向运动,其多普勒速度也为0。从上述多普勒频率与目标径向速度的正比关系可知,多普勒频率也为0。从而,目标差拍信号对应的频率为[10]:

式中,B 表示毫米波雷达信号的带宽,T 表示雷达的脉冲重复间隔,c 表示电磁波在空间中的速度,μ 表示信号带宽与发射周期的比值,R 则目标到雷达平台的径向距离。
当目标与雷达有径向方向的相对运动时,不妨设径向速度为V,对应的多普勒频率为fd,则有:

接收信号可以看作为发射信号在时间轴上的平移,与待测目标的距离R 之间的关系可以表示为:
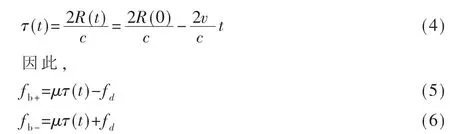
由式(5)和式(6)可以计算出接收信号相对于发射信号的时间延后和多普勒频率分别为:

因此可以计算出待测目标的距离和速度:
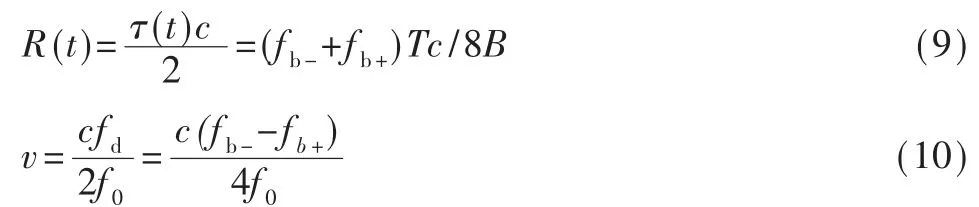
由式(9)和式(10)可知,要测量目标与雷达的径向距离,主要是要想办法求出差拍信号频率,所以对差拍信号频域分析就显得尤为重要。对于时域信号求其频率,可以使用快速傅里叶变换(FFT)进行操作。由于三角波分为上下两个调频段,在FFT 算法以后,还需要进行频谱配对操作,继而求出感兴趣目标与雷达的径向距离和径向相对速度。从式(9)中可以看出,影响测距精度的因素是差拍信号的频率精度;从式(10)中可知影响测速精度的也是差拍信号的频率精度。
2 有无人检测算法
毫米波雷达对待测空间不断发射电磁波信号,收集回波信号并根据雷达的测距测速原理进行信号预处理、相位展开和去趋势以及低通滤波处理获得低频数据,再对低频数据找峰值,如果峰值满足一定的阈值条件,再考虑天线信道发射信号强度不一的问题,选取的4 根天线中有3 根符合上述条件则判定为有人,否则为无人。具体可以概括成以下几个步骤。
2.1 预处理
先收集待测空间无人时的回波信号,用来对后续的有人时的回波数据做差以消除静态杂波,可以减少室内较大静态物体所产生的杂波信号对目标回波信号的影响。
2.2 相位展开和去趋势
对以上静态杂波消除后的数据,根据毫米波雷达中距离与相位成正比的关系,从距离维信息中提取出相位数据。
将提取的相位数据进行相位展开处理以获得相位真实值。
将展开后的相位数据作分段去趋势处理,具体为通过获得的相位真实值的相邻极值构造线性函数,以此求得每个索引所对应的预测值,然后以相位真实值与预测值作差可达到去趋势的效果,解决相位漂移问题,再累积一定帧数的数据后作傅里叶变换,以此获得频域范围内的信号强度分布情况。
2.3 低通滤波
对相位展开和去趋势后的数据滤波,去除高频噪声,获得低频信号。
2.4 找峰值
有人存在时就有呼吸,呼吸时有胸腔壁的起伏,就容易被雷法捕获,呼吸频率为低频,所以有人时一般能在低频找到一个峰值。
2.5 阈值判断
当人坐在沙发上时,呼吸时身体的微动也会传导到皮沙发上,由于皮沙发的强反射,可能也会产生一个峰值,所以需要对上述找到的峰值做一个阈值筛选,满足一定的条件才认为可能是人,否则认为是无人。
2.6 天线判定
由于雷达天线生产的误差,会导致各个信道的强度有所变化,进而影响峰值阈值的判断,所以又做了个天线判定,选取的4 根天线中有3 根符合上述条件则判定为有人,否则为无人。
有无人检测算法流程图如图1 所示。
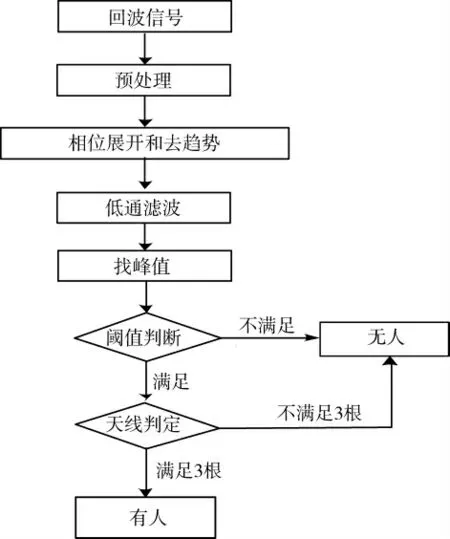
图1 有无人检测算法流程图
3 实验与分析
实验选用60 GHz 型号为ISK6843 的毫米波传感器,具有低功耗、自监控、超精确雷达系统的理想解决方案的优点,3 发4 收,能形成12 根虚拟接收天线,其距离分辨率为0.976 m,角度分辨率为0.9375°。测试环境:雷达架设高度为1.8 m,检测区域大小为8 m×15 m,人员在皮沙发上正坐、侧卧。受试者有10 人,记录回波数据。测试环境为理想的家居环境。首先在无人时,采集1 帧雷达回波信号,用来做静态杂波消除,减少室内较大静态物体所产生的杂波信号对目标回波信号的影响。
其次,让受试者正坐在沙发上,面朝雷达方向,雷达在受试者正前方,采集1 280 帧回波信号,每256 帧分为一段,按步长128 分别计算相位并展开相位,观察12根天线的相位漂移情况,如图2 所示,然后再观察信号强度情况,如图3 所示。
图2 相位漂移
图3 信道信号强弱情况
由图2 可以看到,天线6 和天线9 存在相位漂移。由图3 可知,1、3、5、6 这4 根天线信号幅度较强,所以后续选用这4 根天线再进一步做有无人判断分析。
再次,人体呼吸和心跳的频率是在0.1~2 Hz,其中呼吸是在0.1~0.8 Hz,心跳是在0.8~2 Hz[11],所以通过低通滤波将频率范围锁定在2 Hz 以内,通过生理特征参数区别与别的物体。
然后,由于正常情况下呼吸时会引起胸腔起伏1~12 mm,而心跳会引起胸腔起伏0.1~0.5 mm,因此在同一人体条件下,雷达更容易捕获呼吸的起伏,而淹没心跳的起伏。所以本文是通过能否在低频信号中找到呼吸的微动来区别与其他物体的,由雷达采样频率算得2 Hz 对应的采样点为23,图4 代表2 Hz 内信号情况,可以看到在采样点9 的位置有一个峰值,9 对应的频率为0.78 Hz,在呼吸频率0.8 Hz 内,所以初步认为这是有人,需做进一步分析。
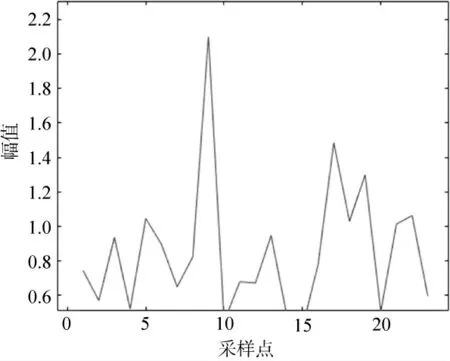
图4 低频信号的分布情况
因为皮沙发会反射一个类似于人体的信号,产生虚警,所以需排除皮沙发的干扰。排除方法为将一个256段内的点取平均,得到一个均值,再找到这个段内的最大值,将最大值减去均值后再除以均值作为一个参数Ratio,把Ratio 作为一个阈值,通过大量数据的分析,取值为2.5,能较大概率地区别人与皮沙发。如果每一个段内算出的这个值小于2.5,则暂定认为有人,需做进一步的判定。
由前面选取的最强信号强度的天线得到的数据分别进行上述判定,如果大于等于3 根的天线数据都符合以上情况,则认为是有人,否则是无人。
由10 个受试者分别参与上述测试,雷达距离沙发分别为1 m、2 m 和3 m。其中男女各5 人,识别情况如表1 所示。
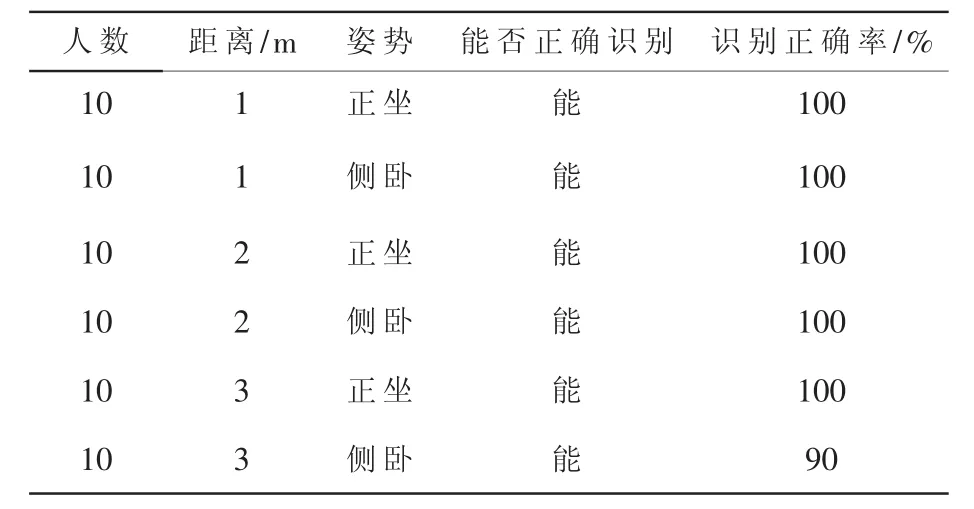
表1 受试者识别情况
由表1 所示,利用有无人算法处理后的数据,3 m时其中有1 人未能检测准确外,其余均能正确识别,60人次能正确识别59 人次,其整体检测准确率在98%以上,检测可信度高,可排除皮沙发的干扰。
4 结论
本文在针对针对智能家居环境中皮沙发的干扰,提出一种判断策略方法,通过人体呼吸信号的频率范围是否有峰值来做初步判定,然后再根据大数据分析取得Ratio 的经验阈值来排除皮沙发的干扰,最后通过天线数是否达到阈值做最终判定,这种层层相扣使得识别正确率较高,整体达到98%以上,使虚警减少。在判定有人的情况下,可以进一步地去计算呼吸次数和心跳次数,为家庭监护或者医疗监护提供更便捷的方法。
猜你喜欢
少先队活动(2022年9期)2022-11-23 06:55:52
小哥白尼(军事科学)(2019年2期)2019-04-17 02:17:28
小哥白尼·趣味科学画报(2019年12期)2019-02-28 11:55:02
中国交通信息化(2017年10期)2017-06-06 07:13:20
岷峨诗稿(2017年4期)2017-04-20 06:26:43
新高考(英语进阶)(2017年12期)2017-02-26 11:37:34
电子制作(2016年1期)2016-11-07 08:42:54
学习月刊(2016年19期)2016-07-11 01:59:46
通信电源技术(2016年6期)2016-04-20 06:21:16
通信电源技术(2016年5期)2016-03-22 01:09:44