
双闭环滑模控制移动机器人的运动轨迹
2022-10-19 05:07冯巧红
湖北理工学院学报 2022年5期
冯巧红
(滁州职业技术学院 电气工程学院,安徽 滁州 239000)
移动机器人作为当今的智能化产品之一,给人们的日常生活带来了极大的便利。但目前移动机器人控制系统普遍存在响应速度相对滞后、控制精度不高的问题,只能执行相对简单的重复性工作,无法完成复杂任务,尤其是在未知环境中工作时[1-2]。如何让移动机器人更好地为人类服务,控制系统的设计至关重要。Nabanita等[3]和席万强等[4]研究了机器人自适应滑模控制方法,引用了自适应滑模控制器,较好地提高了机器人运动路径的跟踪精度。尤波等[5]和Yin等[6]研究了移动机器人模糊滑模控制方法,建立了其位置坐标,定义了运动轨迹误差方程式,设计了模糊滑模控制器,降低了移动机器人运动位置误差。滕昊等[7]和赵安等[8]研究了机器人双环滑模控制方法,建立了机器人运动学模型,提出了机器人双环路径跟踪控制系统,使响应速度和控制精度都得到了改善。以上研究都是针对控制系统功能的实现,而控制精度仍是研究的难点。
本文以移动机器人简图为例,推导机器人运动学方程式,采用内环和外环双重工作模式,设计双闭环滑模控制系统,以提高运动位置和旋转角度的跟踪精度,最后采用MATLAB进行仿真检验,对比不同控制方法的轨迹跟踪误差大小,为后期深入研究移动机器人控制理论提供参考。
1 移动机器人模型
移动机器人模型如图1所示。移动机器人模型有3个轮子,左右两侧各有1个驱动轮,前部有1个被动轮,操纵器有3个连杆。移动机器人的变量定义如下:τl,τr,τ1,τ2,τ3分别为左轮、右轮、接头1,2,3上的扭矩;θl,θr分别为左、右轮的旋转角度;R和φ为移动平台向前移动位置和旋转角度;θ1,θ2,θ3为连杆1,2和3相对于z0,z1和z2轴的旋转角度;mp,mw,m1,m2,m3为移动平台、车轮、连杆1,2和3的质量;Iz和Iw为移动平台和车轮相对于z0轴的惯性矩;d为质心C与左、右两车轮之间的距离;r为车轮的半径;l1,l2,l3为连杆1,2,3的长度。

图1 移动机器人模型
移动平台质心C的位置表示为x和y,则左、右2个车轮的质心位置为:
(1)
设r1,r2和r3表示关节和连杆质心之间的距离,则连杆1,2和3的质心坐标为:
(2)
受非完整约束的系统动力学[9]公式为:
(3)

轮胎动力学方程式定义为:
(4)
(5)
2 控制器设计
2.1 移动平台的运动学方程
三轮移动平台系统具有3个自由度qv=[xyφ]T,三轮移动平台的速度关系为:
(6)
式(6)中,vl为移动平台的线速度;ω为移动平台的角速度;Jv(φ)为变换矩阵。
非完整速度约束驱动轮完全滚动且不打滑,只能沿垂直于驱动轮轴的方向移动,则:
y′cosφ-x′sinφ=0
(7)
(8)
式(8)中,AT(qv)=[-sinφcosφ0]T。
2.2 外环控制设计
实际姿态和期望姿态之间的跟踪误差定义为:
(9)
移动平台外环的滑动面[10]定义为:

(10)
式(10)中,kvoe为1个增益矩阵。
将虚拟速度指令vvc作为移动平台速度vv的虚拟控制,可以得到:
(11)
为了满足稳定性条件,定义:
(12)
式(12)中,kvo1,kvo2,kvo3为增益矩阵;εvo,γvo为常数。
2.3 内环控制设计
采用双闭环控制的移动机器人控制流程如图2所示。

图2 采用双闭环控制的移动机器人控制流程
辅助跟踪误差和指令误差定义为:
evi=vv-vvc
(13)
(14)
式(14)中,λvi为常数矩阵。
选择过滤后的二阶误差面为:
svi=vv-rvi
(15)
为了满足稳定性条件,选择动态控制率为:
(16)
式(16)中,kvi1,kvi2,kvi3为常数矩阵;εvi,γvi为常数。
3 误差仿真
通过MATLAB软件对移动机器人运动位移和角度跟踪误差进行仿真,分析移动机器人控制系统的稳定性,参数设置为:mp=6 kg,mw=0.7 kg,m1=m2=m3=0.6 kg,l1=l2=l3=0.2 m,d=0.15 m,r=0.08 m。
假设移动机器人运动轨迹为x2+y2=1,移动机器人在X和Y方向的位移跟踪误差分别如图3和图4所示。

图3 X方向的位移跟踪误差

图4 Y方向的位移跟踪误差
由图3可知,在X方向,采用滑模控制器的移动机器人跟踪精度较低,误差范围为[-2.0×10-2,2.0×10-2]m,采用双闭环滑模控制器的移动机器人跟踪精度较高,误差范围为[-0.5×10-2,0.5×10-2]m,跟踪误差范围降低了1.5×10-2m。由图4可知,在Y方向,采用滑模控制器的移动机器人跟踪精度较低,误差范围为[-2.5×10-2,2.5×10-2]m,采用双闭环滑模控制器的移动机器人跟踪精度较高,误差范围为[-0.7×10-2,0.7×10-2]m,跟踪误差范围降低了1.8×10-2m。
移动机器人在旋转方向的角度跟踪误差如图5所示。由图5可知,在旋转方向,采用滑模控制器的移动机器人跟踪精度较低,误差范围为[-1.0,1.0]deg,采用双闭环滑模控制器的移动机器人跟踪精度较高,误差范围为[-0.5,0.5] deg,跟踪误差范围降低了0.5 deg。因此,在相同工况条件下,采用双闭环滑模控制器的移动机器人运动轨迹跟踪反应速度较快,跟踪精度较高,能够利用反馈信号进行自适应调整,具有较强的鲁棒性。
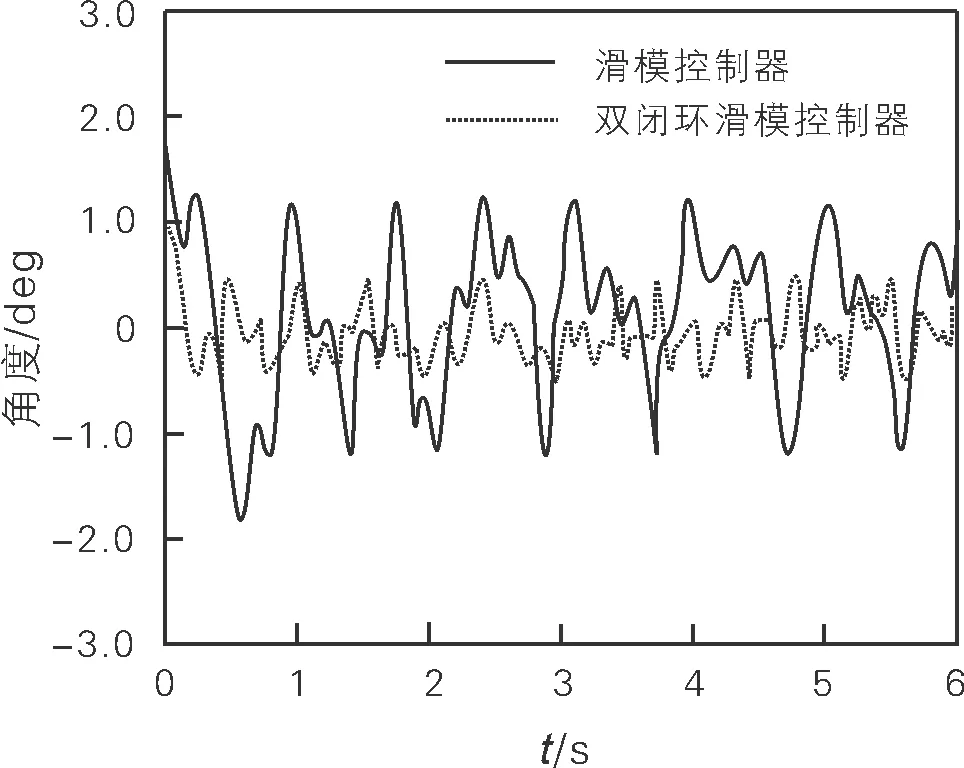
图5 旋转方向的角度跟踪误差
4 结论
针对移动机器人追踪目标误差较大的问题,设计了双闭环滑模控制系统,利用仿真软件分析了移动机器人运动位移和角度追踪误差,主要结论如下。
1)采用滑模控制器的移动机器人在X和Y方向的运动位移以及在旋转方向的角度跟踪误差变化范围分别为[-2.0×10-2,2.0×10-2]m,[-2.5×10-2,2.5×10-2]m和[-1.0,1.0]deg,输出误差范围较大,只适合低精度或者精度要求不高的控制系统。
2)采用双闭环滑模控制器的移动机器人在X和Y方向的运动位移以及在旋转方向的角度跟踪误差变化范围分别为[-0.5×10-2,0.5×10-2]m,[-0.7×10-2,0.7× 10-2]m和[-0.5,0.5]deg,误差变化范围较小,适合高精度的控制系统。
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
舰船科学技术(2022年10期)2022-06-17
大电机技术(2022年2期)2022-06-05
军民两用技术与产品(2022年3期)2022-06-05
纺织服装周刊(2022年16期)2022-05-11
物流科技(2022年2期)2022-05-07
现代仪器与医疗(2021年1期)2021-06-09
航天工业管理(2020年9期)2020-12-28
防爆电机(2020年4期)2020-12-14
电子技术与软件工程(2019年20期)2019-11-30
