基于双向拍卖机制的RMFS货位指派方法研究
2022-10-18 04:24:40李方虎
淮南师范学院学报 2022年5期
李 秀,李方虎
(淮南师范学院 经济与管理学院,安徽 淮南 232038)
一、引言
电子商务的迅猛发展提升了商品的可获得性和便利性,同时也促进了零售电商仓储系统的发展。移动机器人拣货系统(robotic mobile fulfillment system,RMFS)为一种新型“物至人”的订单拣选仓储系统,不仅具有高效率、失误率低等优点,同时由于是拣货机器人进行货位指派、拣货等作业,极大降低了仓库中的劳动强度,有效降低了人为因素所造成的误差。货位指派是商品进行仓库中所面临的第一个问题,科学的货位指派方法可有效减少拣选订单时所需要耗费的时间,提升拣货速率[1],在RMFS系统中还可以降低能耗。RMFS仓储系统普遍运用于亚马逊、GAP等典型的大型企业,其货位指派方法通常采用随机指派机制,此方法具有快速、便捷等优点,但也可能使订单库存量单位(stock keeping unit,统称SKU)搜寻时间增加、拣货路程长等。
合理的货位指派方式可提升拣货机器人的拣货速率,降低拣货时间,有效提高仓库工作效率,降低作业成本[2]。Huang等[3]通过使用货位指派机制提升应对RMFS的订单需求变动和波动能力来降低货位成本。Weidinger等[4]采用自适应编程的货位指派方法来提升拣货效率。Roy等使用拣货机器人存储分配制度,采用两阶段随机模型,来应对不同订单需求的货位指派方法。上述研究采用多种分配方式以提升机器人的拣货效率,但未考虑在不同仓库结构、需求偏度、订单规模等影响因素下的拣选优化效果。
经济学中的拍卖机制是一种典型、有效的资源分配制度,主要的拍卖方式有英式拍卖、荷兰式拍卖、双向拍卖等。目前有很多学者对拍卖机制进行了广泛研究,并成功应用于诸多领域。Adam等[5]对荷兰式拍卖在经济学中的招标研究应用进行了梳理,Guerci[6]等以易腐蚀商品市场为背景,采用荷兰式拍卖研究了连续市场的动态价格。王健等[7]提出基于区块链和连续双向拍卖机制的微电网电力交易模式及报价策略,使得交易方能够根据市场变化及时调整报价。李智芬[8](P12-16)提出基于多回合双向拍卖的计算和通信资源分配算法,提出了一种新的报价策略。毛莺池等[9]提出一种基于组合双向拍卖的资源调度方案,可有效降低时耗,提高供应商的利润。邵嫄等[10]结合运输服务市场承运商和托运人的特点,构建出一种基于双向拍卖的运输服务市场成交概率模型,可为运输服务市场中托运人和承运商在交易中分析成交概率和实现收益最大化。赖明辉等[11]提出不完全信息条件下多个运输商在整车运输方面协作的迭代拍卖机制,证明拍卖机制在运输资源分配上有显著效果。上述研究均表明拍卖方式在资源分配中的有效性,而货位指派本质是将仓库中的商品指派至合适位置,故在仓储系统中,货位指派本质上也是一种资源分配问题。徐翔斌等[12]提出在RMFS采用荷兰式拍卖机制进行货位指派,但未同时考虑待指派区域周转率与待指派SKU的周转率,而导致部分周转率高的SKU被指派至离出口较远的区域,使部分订单的拣选时间过长,不利于工作效率的提升。
为解决上述问题,文章提出基于双向拍卖机制的RMFS货位指派方法,通过模拟分析在不同仓库规模、订单规模以及订单偏度3种不同因素影响下,以待指派SKU与待指派区域的周转率为媒介进行仿真实验得到实验结果,再通过与传统的随机货位指派机制的仿真实验结果相比较,验证双向拍卖机制在RFMS中货位指派的有效性。
二、问题描述与模型构建
(一)问题描述
在RFMS系统中,机器人负责大部分工作,每一台机器人小车一次输送一个货架,并且一次只能对一种SKU进行指派。由于货位指派方法可直接影响仓库的出货速率,合理的货位指派方法很大程度上可以提升机器人小车的工作效率,因此合理的货位指派方法是影响机器人小车工作效率的重要方法之一。文章主要的研究对象为单区仓库,即若干排单一货架成横排摆放,仓库的平面布局如图1所示。

图1 RMFS系统仓库示意图
如图1所示,仓库由出库区、存储区和入库区组成,出库区位于仓库的西侧,每一个货架组有20个货架,仓库按照货架群距拣货工作台的距离长度从大到小分为A、B、C、D4个区域。每一货架只存放一种SKU,每一种SKU只存放于单位一货架。当拣货机器人驶向目标货架时,可从货架底部穿行,而当机器人小车驼着货架驶向拣选区域时,则只能从巷道穿行。当机器人小车电力不足时,则会自动驶向固定的区域进行充电。
文章采用双向拍卖机制,研究其在3种不同规模仓库应用中对拣货速率的影响。机器人小车的具体拣货流程为仓库接到订单、收到拣货信息之后根据目标货物指派机器人小车将货架运送至拣货台进行人工拣选,拣选完毕后再由机器人将货架运回至相应位置。
(二)模型建立
模型假设:仓库为典型仓库,拣货机器人可任意方向全移动;每一排、列的货架数量相同;拣货机器人每次只能运送一台货架;每一种SKU只能指派至单一货位,且一货位只放置一个货架;货架为单层货架,单一货架的承重能力相同;忽略拣货工作人员的拣货时间、等待时间、机器人指派时间以及拣货机器人抬起货架的时间。模型参数定义如表1所示。
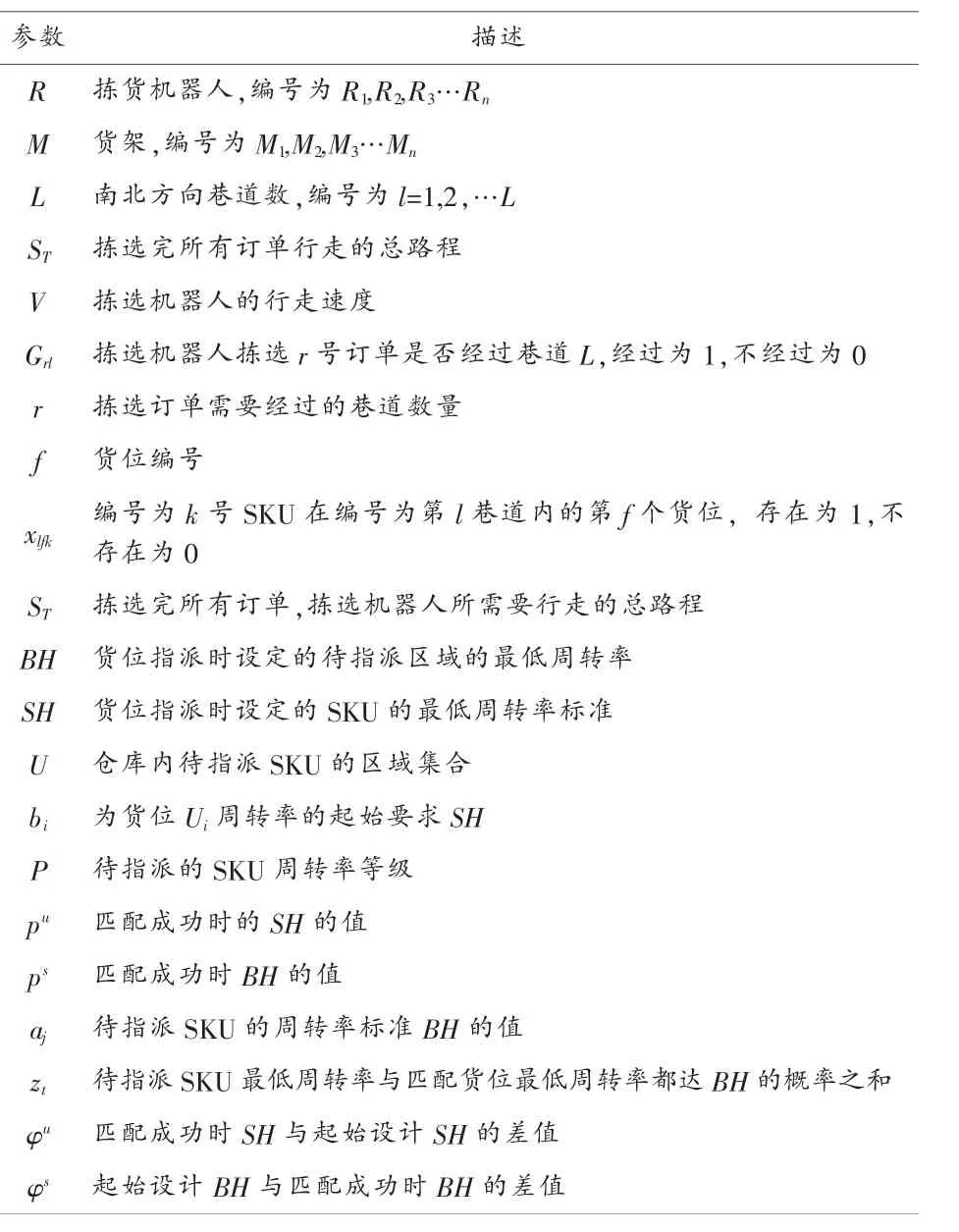
表1 模型参数
货位指派的优化目标是使仓库内的SKU与货位达到一种更为优化的匹配方案,减少拣选机器人拣选周期内总行走路程与行走时间,拣选订单的路程与总时间总目标函数为:

约束条件:

其中:式(1)为货位指派优化后的总目标函数,即使得拣货机器人拣选订单后所行驶的总路最短;式(2)表示一货架只能存放一种SKU;式(3)表示每一种SKU仅会存于单一货架;式(4)表示拣货时机器人至少会行驶一条巷道;式(5)表示为参数与变量的取值范围。
(三)双向拍卖货位指派机制
双向拍卖是一种“多对多”的拍卖方式,即买家和卖家都为多位。卖家提出报价之时,买家也提供投标价格,通过在卖家的逐步减价与买家逐步加价的过程中实现买家与卖家价格的统一,或者当买家所出投标价格高于卖家提出报价时最终达成交易。在双向拍卖中,买方与卖方同拥有对商品的出价权,这便造就了买卖双方的对等关系,具体流程如图2所示。
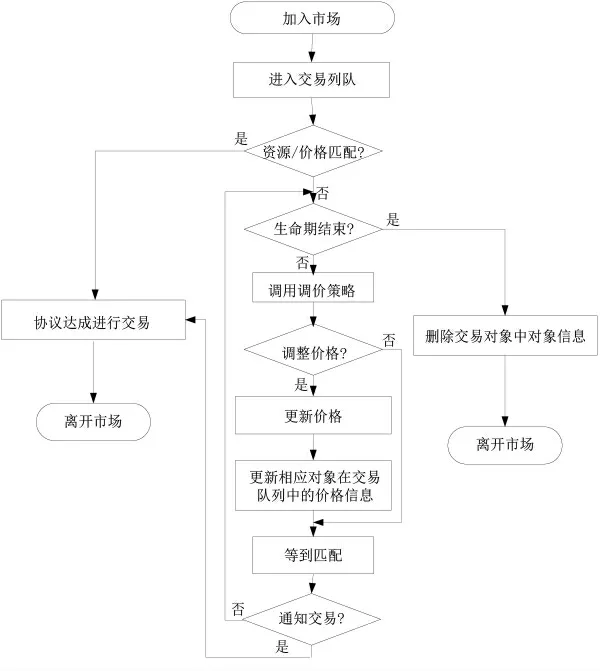
图2 双向拍卖机制具体拍卖流程
货位指派是将商品分配至仓库中合适的货架之上,也是一种资源分配方式,而拍卖机制则是经济学最好的资源分配方法之一。采用合理的拍卖机制对SKU进行货位指派,可有效解决RMFS系统中货位指派不合理问题,以有效提升机器人小车的拣货效率。文章采用的双向拍卖机制货位指派方法是一个连续的拍卖过程,通过双向拍卖机制提升需指派SKU与待指派货位的数量进行匹配从而达到货位指派优化效果,以提升机器人小车的作业效率。
双向拍卖机制货位指派基本思想为:首先,假设仓库中SKU的周转率已知,待指派区域不受买方或者其它待指派区域的影响。待指派区域中货位视为双向拍卖中的卖方(TRS),而待指派SKU则视为双向拍卖中的买方(TRb),周转率(H)视为价格。在采用双向拍卖机制进行货位指派之前,先将SKU指派至任意货位,然后随着TRS的H下降至BHm,TRb的H升高至SH1时,待指派SKU数量与待指派区域货架数量相匹配,则将相应SKU指派至相应货架,直至完成全部区域的货位指派。双向拍卖模型可表示为:

依据双向拍卖模型(式6)将SKU的BH与待指派的SKU周转率的等级数量为(p=p1,p2,p3…pj),运用公式(bt-at)进行运算并得到结果Zt,满足条件Zt的待指派区域即为成功匹配区域。双向拍卖货位指派机制匹配成功的BHm与起始BH1的差值为φu。φu满足以下条件:

起始SH1与匹配成功的SHn的差值为φs。φs满足以下条件:

具体货位指派的基本实验步骤如下:
1.计算仓库中所有SKU的周转率m1~mn。
2.仓库共有M个货位,F列货架,分成n个待指派区域,视为n(n>1)个竞标者。
3.仓库货位的序号呈S型排列,将待指派SKU随机指派至仓库中的货位。
4.按不同偏度(高、中、低)生成3种不同规模(5、10、15个SKU)的订单。
5.对上一步骤生成的订单进行拣选并计算拣货机器人完成不同规模订单所需行驶的路程。
6.再根据TRs的H与TRb的H对仓库进行货位指派,具体调整过程如下:
(1)假设仓库中M1~Mn中TRb高于HT的SKU数量达到匹配要求,则将周转率高于MT的SKU存放于M1~Mn号货位上;
(2)如果TRb高于H的SKU数量小于TRs低于MT的货位数量k(k<n),则逐步降低MT标准至MTi(i<n),提升HT至HTy,同时减少TRs的货位数量,直至待指派货位与待指派SKU数量相同,则将SKU配送至相应货位。
(3)根据步骤(1)与(2)中指派原则对仓库内其它区域的货位进行指派,直至完成全部货位的指派。
7.货位再指派完成以后,对步骤4中生成的订单再次进行拣货作业,得到相应的ST。具体流程如图3所示。
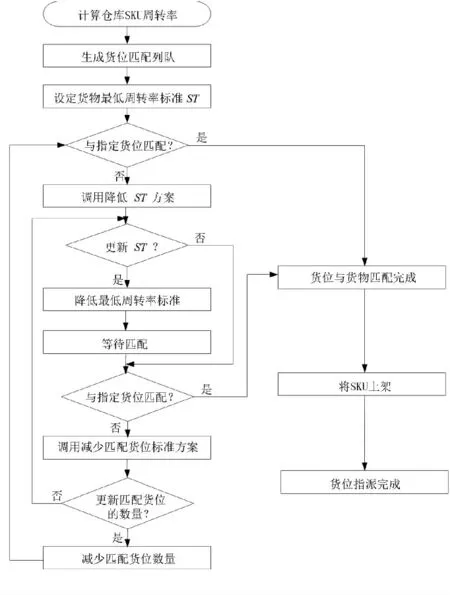
图3 双向拍卖机制货位指派流程图
三、仿真试验
(一)试验因子及参数
试验因子及水平如表2所示,文章设计大(1 320货位)、中(900货位)、小(560货位)3种规模的仓库,SKU有高、中、低3种水平因子,分别表示20%的SKU产生80%、70%和50%的周转率,分别拣选5、10和153种不同订单规模的SKU。
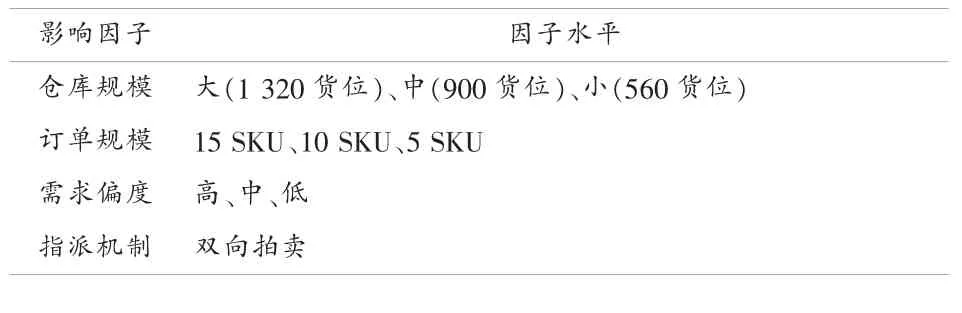
表2 试验因子及水平
在此实验参数下使用双向拍卖机制进行仿真实验优化,可产生27(3×3×3)种不同的实验参数,采用SPSS21.0在不同实验场景下进行因子分析,显著性水平(sig.)为0.05。当显著性水平高于0.05时,则表示因子间相互影响的假设不成立,反之则成立。而F越大,则表示因子间的影响越大,反之则越小,具体如表2所示。
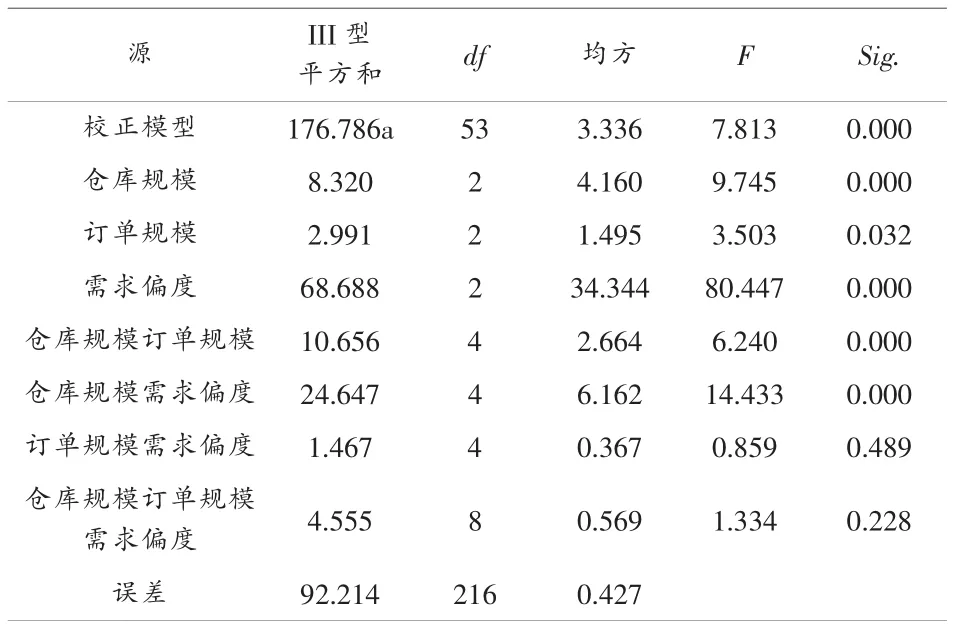
表2 因子间描述性统计
(二)试验结果对比
文章采用双向拍卖对拣货机器人在RMFS系统中进行货位指派,在不同仓库规模、订单规模以及订单规模的实验场景采用MATLAB软件进行仿真模型求解,然后对采用双向拍卖机制指派前后所减少的路程以及时间比率进行对比,所得结果如图4所示。
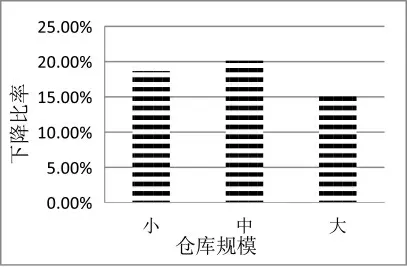
图4 货位指派之后距离与工作时间下降比率
由图4可知,采用双向拍卖货位指派机制具有有效性。其中,在中型仓库中的指派效果最好,指派完成后,拣货路程的比率下降了20.04%,时间比率下降了19.44%。
图5为不同需求偏度的情况下,重新指派后拣货路程与时间比率下降情况。从图5中可以看出,在大、中型仓库中,需求偏度较大时,效果最好,拣货路程下降了23%以上,且随着需求偏度的减少,其指派效果也随之下降;而在小型仓库中,则是中等需求偏度的效果最好。
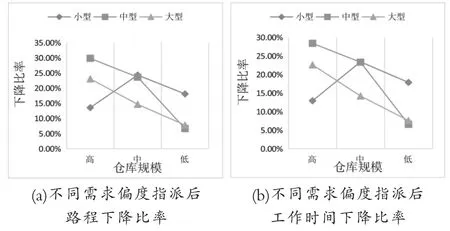
图5 不同需求偏度调整后拣货工作时间与行走距离下降比率
图6为不同订单规模下在不同规模仓库中重新指派后拣货路程与时间比率下降情况。从图6中可以看中,指派后在小、中型仓库中拣选较大规模订单所能节省的路程与时间较多,拣货机器人行走的路程下降比率均达到22%以上;在小型仓库中重新指派后则拣选较小订单能取得较好效果,但越随着订单的加大其效果越不明显。
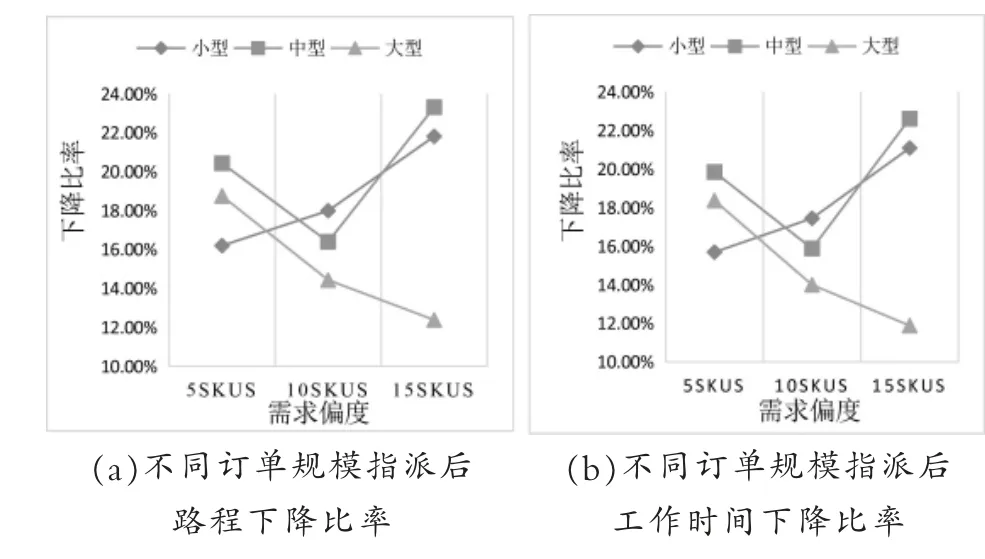
图6 不同订单规模指派后拣货行走距离与工作时间下降比率
重新指派后,在不同规模的仓库、需求偏度和不同规模订单3种因素影响下,拣货机器人在拣选订单后所减少有路程比率如图7所示。从图7可以看出,采用双向拍卖货位指派机制对仓库进行货位指派后,在任意规模的仓库中,拣选不同规模且需求偏度不同的订单其拣货路程均有不同比率的下降。而在中型仓库中,拣选较大订单且订单需求偏度高的情况下,路程下降比率最大,达到34%以上,效果最好。
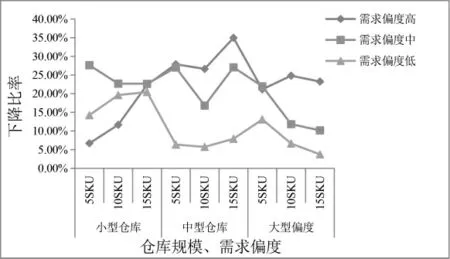
图7 指派后路程下降比率
由此可知,采用双向拍卖机制对仓库进行货位指派之后,可有限降低移动拣货机器人拣选订单所需行走的路程与时间,以提升在RFMS仓储系统中的工作效率,是一种高效的货位指派方式。
四、结论与建议
文章研究双向拍卖货位指派机制在不同规模RFMS仓库中的应用结果发现:在拣选不同规模、不同偏度订单的情况下,双向拍卖货位指派机制能有效减少拣货机器人拣选订单过程中需行走的路程与时间。与随机货位指派方法相比,采用双向拍卖货位指派方法,小型仓库内拣货距离下降比率为18.06%,在中型仓库下降比率为20.04%,在大型仓库内下降15.18%,可有效提升拣货机器人作业效率。双向拍卖货位指派方法,对于大、中、小型规模的仓库均具有良好的指派效果,尤其对中等规模仓库效果最优。由于零售电商企业的多数订单为订单数量大、订单规模较小且订单需求偏度较高的情况,采用此货位指派方法可有效提升仓库拣货效率,减少出库时间,提升客户满意度,为电商仓库中的货位指派研究提供参考。
猜你喜欢
大学数学(2021年2期)2021-05-07 09:24:20
物流技术(2020年5期)2020-06-27 13:05:30
计算机与数字工程(2018年11期)2018-11-28 09:47:00
噪声与振动控制(2017年1期)2017-03-01 11:40:42
系统工程与电子技术(2016年2期)2016-04-16 05:16:58
电测与仪表(2016年13期)2016-04-11 11:23:34
卫星电视与宽带多媒体(2016年8期)2016-03-13 15:04:33
管理现代化(2016年6期)2016-01-23 02:10:59
电子器件(2015年5期)2015-12-29 08:42:56
网络安全与数据管理(2014年5期)2014-07-25 07:44:40