基于一种多功能清扫机器人结构设计
2022-10-17 08:24姬曼马炜钊刘钟远刘瑞雪陈衍琪
科海故事博览 2022年29期
姬曼 马炜钊 刘钟远 刘瑞雪 陈衍琪
(烟台科技学院,山东 烟台 265699)
从1990 年扫地机器人的诞生到目前为止,一直是炙手可热的机器人,从大商场到写字楼再到家庭随处可见,但是,第一代扫地机器人,工作效率低下、清洁效果差、无法识别周围环境,智能程度低。直到2000 年初,智能清扫机器人的诞生,该机器人在清扫的工作效率上得到了提升,但智能水平仍不能到达理想中的效果,不能够有效对房屋进行全面覆盖式清扫。再到2010 年后,随着科技技术的发展,智能清扫机器人在清扫效率得到了快速的发展,截至目前第五代清扫机器人已用到智能识别技术,能更好地为人们服务,因此也得到了人们的喜爱,所以在家庭中,各大商场应用非常广泛。
但对于高校来说这种机器人不太适合,因为对于高校的大阶梯教室来说,阶梯教室大,有台阶,每排桌子都有桌面、桌洞,所以不太适合高校,如人工清扫阶梯教室工作量大、繁琐。因此,本文针对这种情况设计了一种多功能扫地机器人,它能完成清扫平地、爬楼梯、清扫楼梯、清扫桌面,自动吸尘、自动倒垃圾等工作。本文将对该机器人进行设计。
1 多功能清扫机器人总体方案的确定
多功能清扫机器人是集自动爬楼、自动倒垃圾、清扫吸尘、监控感应于一体的智能扫地机器人,与普通扫地机器人不同,多功能清扫机器人能够从稳定的地面运动实现自主的上下爬楼运动,当清扫桌面垃圾时机器人的摄像头装置自动升起,对桌面进行扫描,当发现垃圾立即对其进行清扫。
2 清扫机器人爬行机构方案的确定
借鉴已经研制的机器人设计方案的优点,本文清扫机器人爬行机构主要由电机、前支撑装置、后支撑装置、麦克纳姆轮、抬升机构、机架组成。动力系统由电机和导轨式升降机构组成,为整个机器人的爬行提供动力。爬行机构的整体结构前后具有高度差的支撑装置能水平支撑在楼梯上,当机器人爬楼时前后支撑装置交替支撑、驱动实现多级台阶连续攀爬。爬行机构是整个机器人的支撑载体,在满足刚度和强度的条件下,其质量以轻便为主,机构设计越简单越好,所以做成H 型结构。
3 清扫机器人整体机构方案的确定
本设计采用升降式爬楼梯结构作为基本载体,搭载前扫地清洁装置和图像识别感应装置的基本方案[1]。如图1 所示,1 为爬楼装置,前后两组弓形支撑结构可在自动化控制下交替抬升及前后平移,从而实现台阶的攀爬;2 为吸尘器,吸尘风机作用下灰尘可经垃圾导向壳进入垃圾收集装置;3 为扫地装置,扫地装置中的旋转滚刷将地面灰尘扬起配合吸尘器吸尘;4 为桌面清理装置,旋转清理刷配合图像识别功能将桌面垃圾扫到地面;5 为电池,锂电池高能量,使用寿命长,绿色环保为扫地机器人提供电源能量;6 为驱动装置,采用全向驱动技术,加之麦克纳姆轮的独特运行方式,全向智能移动平台能够在任意方向上实现平移和原地旋转;7 为垃圾收集装置,通过丝杠带动推板前进,推板达到最大极限时,将垃圾桶后盖顶开,垃圾随之倒掉。
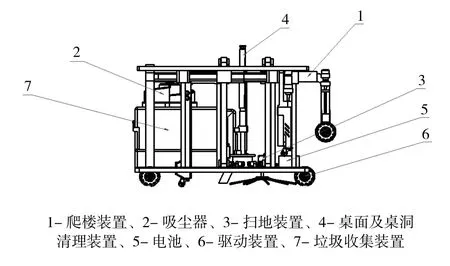
图1 清扫机器人的整体机构
3.1 爬楼机构
机器人的爬楼机构采用的是弓形升降导轨机构,这种弓形升降导轨机构动作简单,结构可靠,工作高效。这种弓形升降导轨机构左右各一组,一组两个弓形机构,一组里面两个弓形机构在运动的过程通过自动化控制交替抬起运行,实现前后平移,从而达到爬楼的目的[2]。
当机器人在平地清扫时可按规定路线进行平地上的平移与旋转,在移动的过程中旋转刷将地面垃圾以及灰尘扬起,通过吸尘机将垃圾以及灰尘导向垃圾仓,从而实现清扫,当清扫机器人运行到有阶梯的楼道口时,弓形升降导轨机构交替抬起进行爬楼,每爬一阶清扫的旋转刷进行旋转将尘土扬起,吸尘器将垃圾吸到垃圾仓,又因机器人的轮子选择的是麦克纳姆轮,任意方向上的平移与原地旋转。该机器人的机构可实现多级台阶连续攀爬以及任意方向上的平移与原地旋转。如图2 清扫机器人的爬楼机构。

图2 清扫机器人的爬楼机构
3.2 桌面清扫机构
桌面清扫机构安装在清扫机器人的上方如图3 桌面清扫机构所示,该机构清洁刷设计为折叠时,目的是为了节约空间,清洁刷与支撑杆有设计为升降模式,只有工作时,清洁刷与支撑杆才会升起。
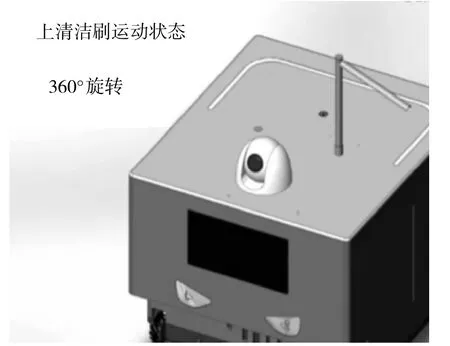
图3 桌面清扫机构
该清洁机器人上清洁时的工作过程:当清扫桌面时,首先升降式摄像头会伸出探头进行桌面检测,如检测到垃圾,升降摄像头会自动下降,桌面清扫机构自动升起,对桌面进行360°旋转清扫,将垃圾清扫拨动至地面,扫地清洁装置将垃圾导向到垃圾仓,从而对桌面进行清扫。
3.3 自动倒垃圾机构
该清扫机器人采用的是自动倒垃圾系统,当垃圾集满箱体时,丝杠带动推板前进,垃圾箱顶开垃圾仓门,垃圾随之倒掉。如图4 所示。
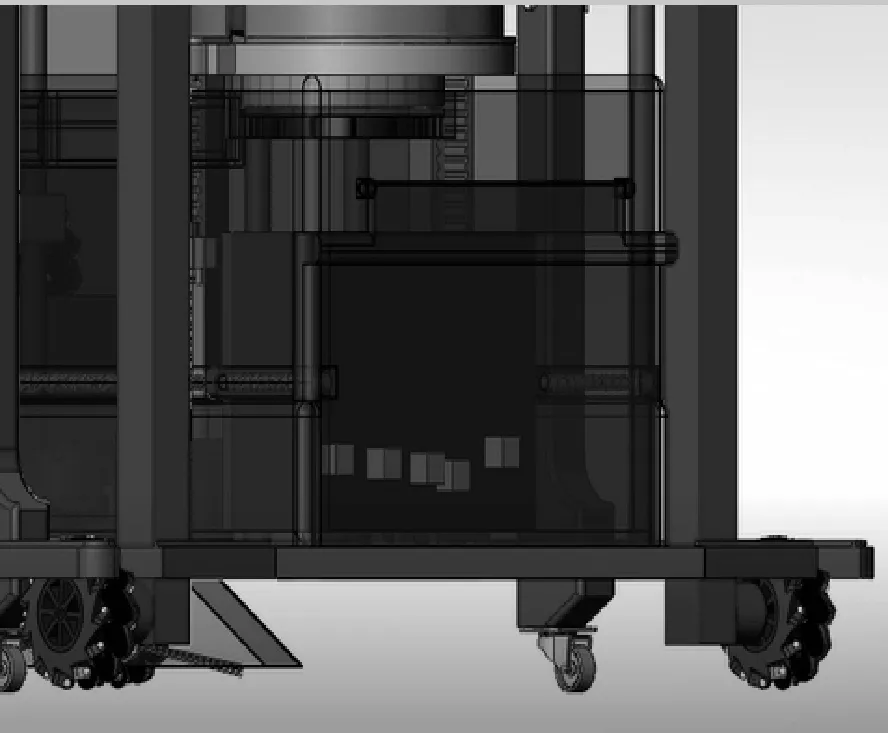
图4 自动倒垃圾装置
3.4 摄像头装置
本文多功能清扫机器人选择的是升降式摄像头,当清扫平面时该摄像头保持原来高度,进行地面扫描;当多功能扫地机器人对桌面进行清扫时,该摄像头升起,360°对桌面进行扫面。因此,该摄像头的功能用来捕捉桌面、地面的垃圾,进行系统垃圾归类,起到识别作用。如图5 摄像头所示。

图5 摄像头装置
3.5 清扫刷
本文多功能机器人采用的是双排清洁刷,清洁刷旋转过程中将垃圾与尘土扬起,之后通过导向口,将垃圾收集在垃圾仓,完成垃圾的清扫。
因此,清洁刷的功能是将地面垃圾聚集,吸尘器将垃圾吸入垃圾箱体内,起到清洁作用。如图6 清扫刷所示。

图6 清扫刷
4 控制装置
感知模块到控制模块再到移动、清洁模块。感知模块的功能准确定位,理论上不存在定位盲区,适合清扫任务复杂地形,遇到特殊情况及时感知并做出反应。控制模块是扫地机器人的中心,控制模块对其他各功能模块进行控制。移动模块负责行走,由驱动电机、驱动轮、麦克纳姆轮以及前后装置抬升机构组成[3],实现上下楼以及各个方向的行走。清洁模块采用的是旋转滚刷,由电机驱动,箱体用来存放纸屑、灰尘等固体垃圾。
5 机器人爬楼工作原理
机器人完成地面清洁抵达楼梯边缘时,启动楼梯清扫模式,机器人首先通过读取传感器反馈判断机器人的位置,当机器位于楼梯顶端时,进行平移清洁,然后启动变形复位模式,当判断机器人不是位于楼梯顶端且满足位于楼梯底端时,启动自动清洁模式,通过传感器识别的位置反馈依次进行平移清洁模式及单级楼梯攀爬模式,以实现台阶的攀爬及清洁。每完成一级台阶清洁后,返回程序,首先判断是否位于楼梯顶端,如此循环,可实现连续多级台阶的自动清洁并抵达楼梯顶端[4]。
6 扫地机器人三维建模
利用SolidWorks 软件对智能扫地机器人进行三维建模,并在SolidWorks 软件中对智能扫地机器人运动轨迹进行了虚拟仿真。使该机器人与实际工作环境相似,通过结果显示合理,三维建模如图7 所示。通过结果确定了扫地机器人的机构,并与实际要求相符合。
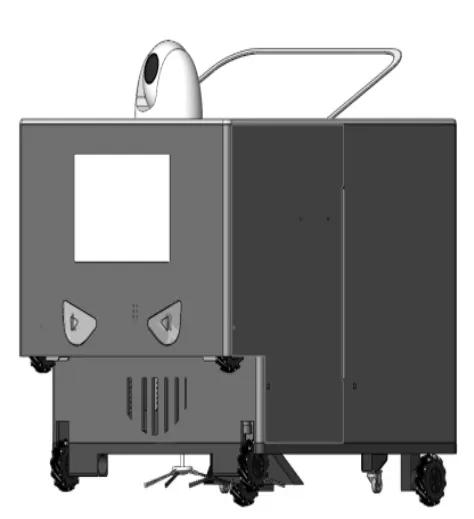
图7 扫地机器人的三维模型
本机器人外形类似龙猫,外观可爱并带有手把,便携方便,整体似方形,可以最大限度地减小运动路径所占面积,可以实现节省人力、高效率工作,保证能够清洁一些狭窄的角落。
7 结论
本文主要对多 功能清扫机器人总体方案、爬行机构方案确定,又阐述了爬楼机构的工作原理,最后对多功能清扫机器人进行了三维建模。通过SolidWorks软件对该多功能清扫机器人进行仿真,结果证明该方案合理。
猜你喜欢
小学生作文辅导·中旬刊(2020年6期)2020-07-24
大众摄影(2018年7期)2018-07-05
青岛画报(2018年1期)2018-02-23
方圆(2017年24期)2018-01-17
小天使·一年级语数英综合(2016年4期)2016-11-19
数学大王·低年级(2016年7期)2016-05-14
读者·校园版(2015年16期)2015-05-14
读写算·小学中年级版(2014年2期)2014-06-10
阅读与作文(初中版)(2009年9期)2009-11-13