
城市轨道虚拟编组列车控制技术实现方法
2022-10-17 10:32:08武强
电子测试 2022年16期
武强
(中铁通信信号勘测设计院有限公司,北京,100036)
1 虚拟编组理念
虚拟编组技术成为重要的突破口,其不再采取传统的机械连挂方式,取而代之的是无线通信方式,针对列车做虚拟编组操作,有效缩短行车间隔,此时列车通行效率随之提高[1]。当然,虚拟编组技术有其突出的专业性特征,对技术的应用水平提出较高的要求,以非头车为例,以何种方式加强防护极为关键,值得在此方面“深度耕耘”。
无线通信代替机械连挂的理念在2000年前后于欧洲提出,随着技术的发展,理论更加扎实、技术应用经验逐步丰富,技术环境更为良好,给虚拟编组的实现创设了更多的可能。2015年5月,Roll2Rail项目得以启动,其包含8个工作组,集行业技术人才于一体,覆盖至机车车辆的各领域,其中下一代列车通信系统的研发成为重点工作方向,以期探寻适用于列车控制的无线通信技术。
2 既有系统存在的主要问题
2.1 车载工作模式层面的问题
在常规机械编组方式下,ETCS(Europe Train Control System,欧洲列车控制系统)主要定义休眠模式(SL)和非本务模式(NL)。从适用范围的角度看,前者用于与头车有电气连接的列车,后者恰好与之相反,即应用于与头车无电气连接的列车。此外,与SL模式相比,NL模式的功能更加丰富。例如新增过分相等功能。而在虚拟编组中,无论选用何种模式,后车的车载设备均存在相应的问题,具体有2个:
(1)列车运行中执行操作,但对于既有的SL或NL模式,对于列车的要求是处于停车的状态,因此需要根据模式转换条件的实际特点做合理优化。
(2)解编后,后车需保持正常运行状态,但对于既有的SL或NL模式,退出相应模式后的运行状态却不尽相同,即只能保持待机、断电的状态,或是启用隔离模式。此时,一方面需要修改模式转换条件,另一方面则要考虑既有模式对各类信息的处理原则,有必要对其做合理的修改,以确保车载设备进入完全监控模式。
2.2 列车间隔控制层面的问题
以何种方式控制列车间隔是重点内容,但在此方面尚未形成定论,从实际发展状况看,设备自动执行的方法更受到技术人员的青睐,此时无需采取手动操作的模式。在此处,则着重考虑列车自动驾驶(Automatic Train Operation,ATO)设备,以期在其支持下完成相应的列车间隔控制动作。
ATO的安全完整性为SIL2级,若实施的是单独控制的模式,虽然操作可行,但实际应用效果较差,难以满足铁路信号系统对安全层面所提出的要求。对此局限性,需要优化安全防护方式,由SIIA级系统参与。若后车车载设备采用完全监控模式,则需要密切关注减小行车间隔的计算方式。对限速曲线计算而言,在此方面缺乏可行性,在此矛盾下,需探寻其他可行的方法,全面保证对ATO控车的防护效果。
2.3 列车位置和完整性信息层面的问题
列车位置报告及其完整性信息是重点资料,能够给列车控制系统的占用检查提供重要的参考,从车载设备的角度看,首先要生成列车位置报告和列车完整性信息,再进一步向RBC(Radio Block Center,无线闭塞中心)实时传输。
若虚拟编组的列车视为整体,此时较为常规的方法是由头车报告位置信息,随着列车的运行,后车的位置信息应基于“车-车通信”的方式传输至前车,此方法从操作层面来看可行,但应用效果有限,即明显增加系统的复杂度。为了满足列车位置和完整性信息的准确性和传输便捷性要求,需要优化列车车载设备的运行方式,由各自负责报告具体的信息。
2.4 自动过分相层面的问题
线路前方有分相区时,确定其起点和长度,由RBC将具体的信息发送给车载设备。车头越过分相区终点并且达到特定的距离后,即可撤销过分相信号。在此机制下,有效提高过分相的自动化水平。
在过分相信息的处理中,若将虚拟编组列车视为整体,对于后车而言,其输出过分相的时机提前,且在列车数量偏多的条件下,易明显延长断电时间,其产生的不良影响则是迫使列车停在分相区。从另一角度看,头车以列车的位置为准,确定各自相对应的合适的分相时机,在此基础之上,实施“车-车通信”的模式,此时则存在车载设备处理复杂度异常提高的问题。由此来看,车载设备的功能应得到升级,需要各自负责过分相功能。
3 面向虚拟编组的列车控制技术
在ATO控车方式下,防护目标的实现需要采用到SIL4级系统,此处提出以下2种方案。
3.1 基于非列车控制系统防护的方案
3.1.1 基本原理
信号以外的系统提供防护功能,但此类方案仍处于理论研究阶段。在该方案下,前车车载设备与ETCS-3级列车控制系统在编组后的运行原理方面具有一致性,不同的是后车车载设备,其特殊之处在于采用的是NL模式,能够将列车运行时的速度信息呈现给司机,自动过分相,但也有局限之处,例如缺乏超速防护功能。
3.1.2 ETCS规范变动
以既有ETCS规范为原型,结合理论研究成果,对NL模式做针对性的优化,具体体现在以下2个几方面。
(1)增加转换条件。考虑的是列车虚拟编组完成、解编2种条件。此时,车载设备需要自动完成操作,即基于实际情况选择进入或退出NL模式。
(2)修改信息使用原则。为了确保在退出后可尽快地启用完全监控模式,要求车载设备接受控车信息包。
3.2 基于列车控制系统防护的方案
3.2.1 基本原理
车载设备启用完全监控模式具有必要性,以便列车控制系统有效防护。从移动闭塞模式看,基本工作机制在于由车载设备向RBC发送列车位置,在“车-车通信”的方式下,后车可获得更新的前车位置,“车-车通信”的列车位置可视为行车许可终点,其突出优势在于缩短行车间隔。当然,虽然该方式可行,但实际应用效果有限,仍需进一步探讨,以便更为有效地缩短行车间隔。
现阶段,移动闭塞普遍应用的是绝对制动距离,但实际应用效果尚有进步的空间,因此在本方案中考虑到相对制动距离的概念。具体而言,在既有观念的控车曲线中,对前方列车速度做出特定的默许,将其视为零,但从实际情况来看,该值并非为零。因此,此处认为引入相对制动距离的概念更符合实际情况,若在完全监控模式下,ATP( Automatic Train Protection,列车超速防护)可给出更小的行车间隔,以达到最大限度减小行车间隔的效果。除此之外,在虚拟编组的方式下,可生成基于相对制动距离的限速曲线,此时的应用效果,还体现在显著提高对ATO安全防护水平的层面。
3.2.2 基于相对制动距离的限速曲线计算
在部分观念中,对前车速度和后车速度的关系做出过理想的假定,即在后者不超过前者的条件下便无相撞问题,此时的控车曲线以前车速度为目标而生成,但从实际情况看,各列车的制动性能不尽相同,尽管后车速度低于前车,但在前车制动性能明显优越的情况下,仍有可能由于前车的短时间制动而导致2车相撞。根据图1所示的示例分析,列车不同速度等级的制动力存在差异,即便后车速度小于前车,也仍有前后车相撞的可能。因此,在有关相对制动距离的计算中,不可过度关注当前运行状态,也不可局限于前车的停车位置,更为合理的是充分关注前车以最大制动力停车的各状态,对其采取针对性的防护措施。
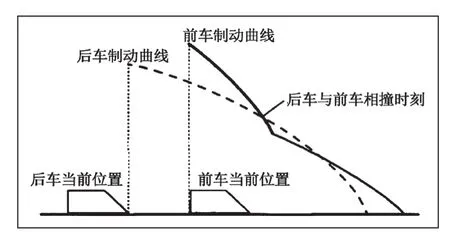
图1 前后车制动力不同造成的相撞
为此,提出相对制动距离的限速曲线,见图2。分析发现:对于限速曲线1,其限制性行车考虑的是前车当前位置和速度;对于限速曲线2,行车许可终点考虑的是最大制动力工作状态下对应的前车位置,在确定该具体的位置时的考虑更为合理,关注的是前后2车的最大值,此时前后2车相撞的问题被有效规避,有利于安全行车。
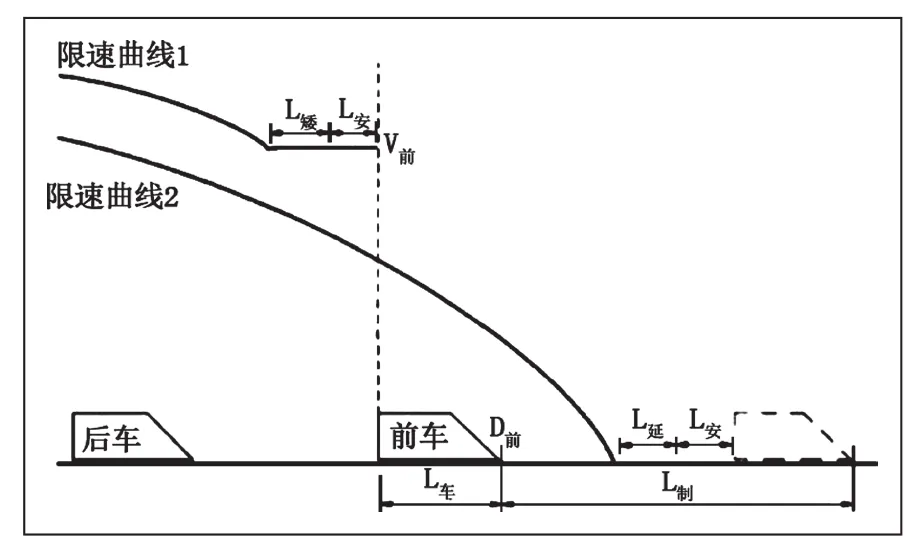
图2 相对制动距离的限速曲线
结合图2分析,对于曲线1,目标点的位置D1和速度V1,可按照式(1)和式(2)计算。

式中:D前为前车制动距离;L车为前车的长度;L安为两车之间的安全距离;L延为安全延伸距离;V前为前车速度。
对于曲线1,D2和V2这2项参数可按照式(3)和式(4)计算。

在式(3)中,L制是前车最短制动距离,发生在最大制动力的条件下。在既有的设计方式下,充分关注的是列车制动距离最大值。对于相对制动距离,除了考虑该距离最大值外,还进一步延伸至最短制动距离的层面,以更加全面的方式分析。在具体设计工作中,建议将虚拟编组车型的制动力进行对比分析,取其中的最大值,作为设计中的最大制动力。在此基础上,考虑多种速度和坡度,建立相应的最短制动距离表,以便提供参考,可通过查表的方式确定前车当前最短制动距离,并将该部分数据及时传输给后车。
在该算法下,前车做出紧急制动停车动作后,实际所处的位置得到有效控制,不会小于之前的预估值。因此,若出现“车-车通信”中断的故障,后车可继续按正常的基于相对制动距离的限速曲线行驶,即与通信中断前保持一致。对于车载设备,则可以计算绝对制动距离的限速曲线,在确定该结果后,做合理化调控。例如列车速度低于限速曲线时,启用的是绝对制动距离的控车模式。在整个过程中,2种控车模式无明显的“卡顿”问题,彼此可平滑过渡,可有效抵御“车-车通信”中断所造成的不良影响,不会由于紧急制动而导,2车相撞。
3.2.3 ETCS规范变动
通过本方案与既有ETCS规范的对比分析可以发现,所提方案的突出特点在于考虑到相对制动距离,并增加相应的控车模式,在既有基础上做出修改,可总结为以下2部分。
(1)在列车虚拟编组方式下,可以启用完全监控模式,对于后车的高效运行和安全运行有重要的意义,若行车许可终点为前车安全车尾时,则密切关注的是相对制动距离,基于此项参数来确定相对应的限速曲线。
(2)若遇到“车-车通信”中断的问题,此时车载设备的响应水平较高,可以基于RBC行车许可重新计算,此时可以得到的是绝对制动距离的限速曲线。以此为参照,若列车速度低于该值,将恢复既有状态,即应用的是绝对制动距离的控车模式。
4 结语
虚拟编组是城市轨道交通建设领域的重要技术发展方向,可缩短列车追踪间隔,提高运输效率,更有效地服务于乘客。根据城市轨道交通建设现状可以得知,前后列车进入同一股道作业,此时若能够合理地应用虚拟编组技术,将更能够发挥出其对列车追踪间距进行高精度控制的优势。面对客流量日益增加的城市轨道交通发展环境,相关技术人员需持续加强对虚拟编组的探索,促进虚拟编组中列车控制技术方案的升级。
猜你喜欢
测试技术学报(2023年2期)2023-04-06 04:38:30
铁道通信信号(2020年10期)2020-02-07 01:01:24
新传奇(2018年16期)2018-05-14 21:32:52
人民交通(2016年5期)2017-01-05 05:48:02
厦门理工学院学报(2016年1期)2016-12-01 04:50:47
人民交通(2016年9期)2016-06-01 12:19:39
铁路通信信号工程技术(2014年1期)2014-02-28 16:55:13
都市快轨交通(2013年5期)2013-03-24 08:53:33
中学生数理化·高一版(2008年6期)2008-11-15 07:30:48
